You might also like
- Best Int ControlDocument77 pagesBest Int ControlhinsermuNo ratings yet
- Commensurabilities among Lattices in PU (1,n). (AM-132), Volume 132From EverandCommensurabilities among Lattices in PU (1,n). (AM-132), Volume 132No ratings yet
- Jordanov NIMA.345.337 1994Document9 pagesJordanov NIMA.345.337 1994leendert_hayen7107No ratings yet
- Process ControlDocument30 pagesProcess Controlzy_yfNo ratings yet
- Prob ch6Document6 pagesProb ch6Dang KhueNo ratings yet
- Time Respons: Dasar Sistem KontrolDocument15 pagesTime Respons: Dasar Sistem KontrolitmyNo ratings yet
- Laplace TransformDocument11 pagesLaplace TransformDerrick Maatla MoadiNo ratings yet
- Time Respons: Dasar Sistem KontrolDocument13 pagesTime Respons: Dasar Sistem KontrolitmyNo ratings yet
- Z TransformDocument22 pagesZ Transformvignanaraj100% (1)
- AN535 Phase Lock Loop Design FundamentalsDocument13 pagesAN535 Phase Lock Loop Design FundamentalsfahkingmoronNo ratings yet
- State Errors - Steady: Eman Ahmad KhalafDocument28 pagesState Errors - Steady: Eman Ahmad KhalafAhmed Mohammed khalfNo ratings yet
- Phase Locked Loop Design FundamentalsDocument22 pagesPhase Locked Loop Design Fundamentalsptt3iNo ratings yet
- Modelling Discrete Time SystemsDocument6 pagesModelling Discrete Time SystemsSandeep KumarNo ratings yet
- 10 1 1 457 1165 PDFDocument30 pages10 1 1 457 1165 PDFvamshiNo ratings yet
- Handout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyDocument14 pagesHandout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyRishikesh BhavsarNo ratings yet
- Overshoot Free Pi Controller Tuning Based On Pole AssignmentDocument5 pagesOvershoot Free Pi Controller Tuning Based On Pole AssignmentEngr Nayyer Nayyab MalikNo ratings yet
- Material 5 - Time Domain Response Analysis-1Document6 pagesMaterial 5 - Time Domain Response Analysis-1Ninggar TitanNo ratings yet
- Control System Fundamental: Time Response AnalysisDocument77 pagesControl System Fundamental: Time Response Analysisoneisa92100% (1)
- 26 Control Engineering LAbDocument50 pages26 Control Engineering LAbEashan PendseNo ratings yet
- Space (Park) Vectors Definition of Space Vectors:: T X A T X A T X T XDocument19 pagesSpace (Park) Vectors Definition of Space Vectors:: T X A T X A T X T XGovor CristianNo ratings yet
- Module 2: Modeling Discrete Time Systems by Pulse Transfer FunctionDocument4 pagesModule 2: Modeling Discrete Time Systems by Pulse Transfer FunctionamritNo ratings yet
- Unit-Step Response:: 1 First Order SystemsDocument2 pagesUnit-Step Response:: 1 First Order SystemsNatalie ChehraziNo ratings yet
- Lab:5 To Plot and Analyze The Responses of First Order Systems For Various Test Signals. Misno: Name: Date of Submission: Marks Out of 10: SignatureDocument9 pagesLab:5 To Plot and Analyze The Responses of First Order Systems For Various Test Signals. Misno: Name: Date of Submission: Marks Out of 10: SignatureKishor BhamareNo ratings yet
- Control System PracticalDocument13 pagesControl System PracticalNITESH KumarNo ratings yet
- Local Stabilization of Linear Systems Under Amplitude and Rate Saturating ActuatorsDocument6 pagesLocal Stabilization of Linear Systems Under Amplitude and Rate Saturating ActuatorshighwattNo ratings yet
- Frequency-Domain Analysis of Dynamic SystemsDocument27 pagesFrequency-Domain Analysis of Dynamic SystemsmoomeejeeNo ratings yet
- 08s Cpe633 Hw2 SolutionDocument4 pages08s Cpe633 Hw2 Solutionram_7860% (1)
- 08s Cpe633 Hw1 SolutionDocument3 pages08s Cpe633 Hw1 Solutionram_786No ratings yet
- IAT SolutionsDocument13 pagesIAT Solutionsjay mehtaNo ratings yet
- Control Engineering StabilityDocument23 pagesControl Engineering StabilityAhmad Azree OthmanNo ratings yet
- Chapter 8: Introduction To Systems Control: 8.1 System Stability From Pole-Zero Locations (S-Domain)Document47 pagesChapter 8: Introduction To Systems Control: 8.1 System Stability From Pole-Zero Locations (S-Domain)Sreedharachary SimhaaNo ratings yet
- On The Calculus of Smarandache FunctionDocument8 pagesOn The Calculus of Smarandache FunctionMia AmaliaNo ratings yet
- Laplas TransformDocument17 pagesLaplas TransformRatnakar PatilNo ratings yet
- (EXE) Random Walknetwork SDocument7 pages(EXE) Random Walknetwork SChristian F. VegaNo ratings yet
- 4 Optimal Linear Reconstruction of The StateDocument49 pages4 Optimal Linear Reconstruction of The StatemailmadoNo ratings yet
- Notes On Control With DelayDocument43 pagesNotes On Control With DelaySumit ChakravartyNo ratings yet
- EECE 301 Note Set 28a CT Partial FractionsDocument8 pagesEECE 301 Note Set 28a CT Partial FractionsrodriguesvascoNo ratings yet
- Stability of Linear Systems: DR K P Mohandas, Professor, NIT CalicutDocument7 pagesStability of Linear Systems: DR K P Mohandas, Professor, NIT Calicutsuresh1virdiNo ratings yet
- State Estimation Using Shifted Legendre Polynomials: B.M.Mohan, Senior Member IEEE Sanjeeb Kumar Kar, Student Member IEEEDocument6 pagesState Estimation Using Shifted Legendre Polynomials: B.M.Mohan, Senior Member IEEE Sanjeeb Kumar Kar, Student Member IEEErodlnf1No ratings yet
- Dynamic Behavior of More General SystemsDocument32 pagesDynamic Behavior of More General Systemsjasonbkyle9108No ratings yet
- Z TransformDocument22 pagesZ TransformcivaasNo ratings yet
- Semiconductor Application Note: Prepared By: Garth Nash Applications EngineeringDocument12 pagesSemiconductor Application Note: Prepared By: Garth Nash Applications EngineeringefddfdsdsaNo ratings yet
- Note 9 Stability: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862Document11 pagesNote 9 Stability: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862dhineshpNo ratings yet
- Stability Analysis and Compensation of Time Delays in Analog Control SystemsDocument18 pagesStability Analysis and Compensation of Time Delays in Analog Control Systemsamir shaharanNo ratings yet
- Control Lecture 8 Poles Performance and StabilityDocument20 pagesControl Lecture 8 Poles Performance and StabilitySabine Brosch100% (1)
- Chapter 4Document35 pagesChapter 4S S S REDDYNo ratings yet
- UntitledDocument32 pagesUntitledMasudur RahmanNo ratings yet
- Chapter 8 Discrete (Sampling) SystemDocument38 pagesChapter 8 Discrete (Sampling) Systemmcoto99No ratings yet
- Laplace 2Document46 pagesLaplace 2smoothing1No ratings yet
- Tabla Transformadas PropiedadesDocument8 pagesTabla Transformadas PropiedadesYarith LopezNo ratings yet
- Basic System AnalysisDocument4 pagesBasic System AnalysisdhananjayNo ratings yet
- Enae 641Document17 pagesEnae 641bob3173No ratings yet
- Control System PracticalDocument19 pagesControl System PracticalYashNo ratings yet
- Feedback Example: The Inverted Pendulum: Recommended ProblemsDocument10 pagesFeedback Example: The Inverted Pendulum: Recommended Problemsam1liNo ratings yet
- ZH1 2008 Oct 20 AngolDocument1 pageZH1 2008 Oct 20 AngolAngel FortuneNo ratings yet
- The Exponential Form of The Fourier SeriesDocument28 pagesThe Exponential Form of The Fourier SeriesRabab JaffriNo ratings yet
- HTTP WWW - LivemintDocument5 pagesHTTP WWW - Livemintmohsindalvi87No ratings yet
- 10 1 1 215 5171Document5 pages10 1 1 215 5171mohsindalvi87No ratings yet
- Rand Num GenDocument7 pagesRand Num Genmohsindalvi87No ratings yet
- One Way ANOVA: DescriptionDocument3 pagesOne Way ANOVA: Descriptionmohsindalvi87No ratings yet
- HTTP ScrollDocument16 pagesHTTP Scrollmohsindalvi87No ratings yet
- Style Basics in WordDocument18 pagesStyle Basics in Wordmohsindalvi87No ratings yet
- Response Surface MethodologyDocument15 pagesResponse Surface MethodologyBorad M. BarkacharyNo ratings yet
- Principal Components Analysis ADocument9 pagesPrincipal Components Analysis Amohsindalvi87No ratings yet
- Circuit Analysis DC CircuitsDocument13 pagesCircuit Analysis DC Circuitsmohsindalvi87No ratings yet
- A Smart Boring Tool For Process ControlDocument18 pagesA Smart Boring Tool For Process Controlmohsindalvi87No ratings yet
- HTTP WWW - Iitkgp.ac - in Academics Paper ListDocument14 pagesHTTP WWW - Iitkgp.ac - in Academics Paper Listmohsindalvi87No ratings yet
- (11)Document24 pages(11)Humberto ValadezNo ratings yet
- An Assistive Navigation System For Wheelchairs Based Upon Mobile RobotDocument5 pagesAn Assistive Navigation System For Wheelchairs Based Upon Mobile Robotmohsindalvi87No ratings yet
- E 32150Document244 pagesE 32150mohsindalvi87No ratings yet
- Leveraging Shainin For Quicker and More Efficient Problem Solving - A Discussion With Ha Dao, Director at SSA & Company by Ha DaoDocument9 pagesLeveraging Shainin For Quicker and More Efficient Problem Solving - A Discussion With Ha Dao, Director at SSA & Company by Ha Daomohsindalvi87No ratings yet
- Fdi 2013 Opt ToolDocument37 pagesFdi 2013 Opt Toolmohsindalvi87No ratings yet
- Global Optimization Toolbox R2013aDocument597 pagesGlobal Optimization Toolbox R2013amohsindalvi87No ratings yet
- Superposition Theorem:the Current Through or Voltage AcrossDocument10 pagesSuperposition Theorem:the Current Through or Voltage AcrossAngeloLorenzoSalvadorTamayoNo ratings yet
- Github Pattern Classification Matrix Cheatsheet TableDocument9 pagesGithub Pattern Classification Matrix Cheatsheet Tablemohsindalvi87No ratings yet
- THEVENIN'S THEOREM: This Theorem State That Any Two-Termenal Linear Bialateral CircuitDocument8 pagesTHEVENIN'S THEOREM: This Theorem State That Any Two-Termenal Linear Bialateral Circuitmohsindalvi87No ratings yet
- Leveraging Shainin For Quicker and More Efficient Problem Solving - A Discussion With Ha Dao, Director at SSA & Company by Ha DaoDocument9 pagesLeveraging Shainin For Quicker and More Efficient Problem Solving - A Discussion With Ha Dao, Director at SSA & Company by Ha Daomohsindalvi87No ratings yet
- Modeling, Representing, and Configuring Restricted Part-Whole RelationsDocument6 pagesModeling, Representing, and Configuring Restricted Part-Whole Relationsmohsindalvi87No ratings yet
- Modeling, Representing, and Configuring Restricted Part-Whole RelationsDocument6 pagesModeling, Representing, and Configuring Restricted Part-Whole Relationsmohsindalvi87No ratings yet
- Volker Haarslev Xerox Palo Alto Research Center 3333 Coyote Hill Road, Palo Alto, CA 94304, USA Ralf M Oller University of Hamburg, AI Laboratory Bodenstedtstr. 16, D-2000 Hamburg 50, FRGDocument8 pagesVolker Haarslev Xerox Palo Alto Research Center 3333 Coyote Hill Road, Palo Alto, CA 94304, USA Ralf M Oller University of Hamburg, AI Laboratory Bodenstedtstr. 16, D-2000 Hamburg 50, FRGmohsindalvi87No ratings yet
- MIS Lecture 11Document5 pagesMIS Lecture 11Nitin GargNo ratings yet
- Revisions Analysis and The Role of Metadata: Andreas LorenzDocument17 pagesRevisions Analysis and The Role of Metadata: Andreas Lorenzmohsindalvi87No ratings yet
- Lecture (13) Polygon, Polyline and Donut: Department of Computer Engineering& Information TechnologyDocument25 pagesLecture (13) Polygon, Polyline and Donut: Department of Computer Engineering& Information Technologymohsindalvi87No ratings yet
- Potential Benefits of Water Supply Regionalization: A Case Study The Seattle and Everett Water SystemsDocument10 pagesPotential Benefits of Water Supply Regionalization: A Case Study The Seattle and Everett Water Systemsmohsindalvi87No ratings yet
- Lec 3Document15 pagesLec 3mohsindalvi87No ratings yet
- Literature Review Week 1Document5 pagesLiterature Review Week 1api-407728939No ratings yet
- TR tm2Document100 pagesTR tm2meltdownxNo ratings yet
- Laplace Table PDFDocument2 pagesLaplace Table PDFJohn Carlo SacramentoNo ratings yet
- Math 7 - Q3 - W7 - Illustrating Circles and Terms Related To It - (Laorden, M.)Document11 pagesMath 7 - Q3 - W7 - Illustrating Circles and Terms Related To It - (Laorden, M.)Princess Allyza Formaran100% (1)
- DS BookDocument375 pagesDS BookSnehasis ChoudhuryNo ratings yet
- Continuous Beams Structural AnalysisDocument18 pagesContinuous Beams Structural AnalysisRicardo EspinosaNo ratings yet
- Oakdale Middle School 8th Grade Math SyllabusDocument4 pagesOakdale Middle School 8th Grade Math Syllabustree5215No ratings yet
- W.P.energy Final ColourDocument89 pagesW.P.energy Final Colourmanan100% (1)
- Physics G10 - 12Document67 pagesPhysics G10 - 12Chikuta ShingaliliNo ratings yet
- Solving QE (Extracting The Square Roots)Document2 pagesSolving QE (Extracting The Square Roots)TheKnow04No ratings yet
- Probability in Casinos FinalDocument36 pagesProbability in Casinos FinalMuskan MishraNo ratings yet
- 1815 13 PDFDocument24 pages1815 13 PDFsiamak001No ratings yet
- Abstract For Timetable GenerationDocument4 pagesAbstract For Timetable Generationashish100% (4)
- 519H0206 Homework3Document12 pages519H0206 Homework3King NopeNo ratings yet
- Ok-Math9, Q1, W5&6Document6 pagesOk-Math9, Q1, W5&6ronilynn veranoNo ratings yet
- 05 Class Three Mathematics Notes 10 PagesDocument11 pages05 Class Three Mathematics Notes 10 PagesShahjahan MeeraniNo ratings yet
- Cengage Book List PDFDocument11 pagesCengage Book List PDFAnup KumarNo ratings yet
- HomeworkDocument2 pagesHomeworkGiang Ngô Thị ThuNo ratings yet
- Ejemplo CFX o Fluent Heat Conduction in A CylinderDocument11 pagesEjemplo CFX o Fluent Heat Conduction in A Cylinderavilaman45No ratings yet
- Assign 01Document2 pagesAssign 01arunabh bhattacharyaNo ratings yet
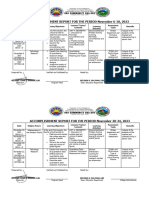
- Mike Ranada Accomplishment Report November 2023Document3 pagesMike Ranada Accomplishment Report November 2023MARICSON TEOPENo ratings yet
- ESci 11 - Mid Term Exam ADocument1 pageESci 11 - Mid Term Exam Aje solarteNo ratings yet
- LP On Zero and Negative Exponents (Rational Algebraic Expressions)Document5 pagesLP On Zero and Negative Exponents (Rational Algebraic Expressions)Rox Francisco100% (1)
- Worksheet of Linear Equation With One VariableDocument5 pagesWorksheet of Linear Equation With One VariablekristianasillyNo ratings yet
- GROUP 1 - Bilphys18 - ElectrodynamicsDocument21 pagesGROUP 1 - Bilphys18 - ElectrodynamicsLasmaenita SiahaanNo ratings yet
- China National - Olympiad 2011 65Document2 pagesChina National - Olympiad 2011 65Ngạo Cuồng TàNo ratings yet
- 7 CH 5 Set Theory PDFDocument66 pages7 CH 5 Set Theory PDFtatiana chaconNo ratings yet
- Crystallography Notes11Document52 pagesCrystallography Notes11AshishKumarNo ratings yet
- Goppa McelieceDocument41 pagesGoppa McelieceleoverobrNo ratings yet
- 01-1 Finite Difference MethodDocument37 pages01-1 Finite Difference MethodMyher ChNo ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900From EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900No ratings yet
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityFrom EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityRating: 5 out of 5 stars5/5 (2)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringFrom EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringRating: 5 out of 5 stars5/5 (40)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-2-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1714993295?v=1)