You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Process DocumentationDocument26 pagesProcess DocumentationKhaleel NazeerNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Invoice Tracker Dashboard v.1.0Document19 pagesInvoice Tracker Dashboard v.1.0علي عبدالله قاسم شلحNo ratings yet
- FreeCAD Manual 0 16Document566 pagesFreeCAD Manual 0 16Myo Aung100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Mak4462 Machine Tools: Yildiz Technical University Faculty of Mechanical Engineering Department of Mechanical EngineeringDocument12 pagesMak4462 Machine Tools: Yildiz Technical University Faculty of Mechanical Engineering Department of Mechanical EngineeringALPERENNo ratings yet
- Ti Sns50-Hba0-S01 1034097Document8 pagesTi Sns50-Hba0-S01 1034097zaleksNo ratings yet
- ProFlex4 Trainings OverviewDocument16 pagesProFlex4 Trainings Overviewart0928No ratings yet
- Worked Example Earthing CalculationDocument6 pagesWorked Example Earthing CalculationMustafa KamalNo ratings yet
- IWPT-PL-1: Index Terms - Solar Power Satellite, Wireless PowerDocument4 pagesIWPT-PL-1: Index Terms - Solar Power Satellite, Wireless PowerPrashanth Kumar ShettyNo ratings yet
- Micro GridDocument12 pagesMicro GridPrashanth Kumar ShettyNo ratings yet
- DiodeDocument4 pagesDiodePrashanth Kumar ShettyNo ratings yet
- Micro GridDocument12 pagesMicro GridPrashanth Kumar ShettyNo ratings yet
- Netpro Operation Manual 2k0 4k0 VaDocument20 pagesNetpro Operation Manual 2k0 4k0 VaDanny Dan100% (2)
- 24 PDFDocument8 pages24 PDFmohammedNo ratings yet
- Résumé For Arjun JayaramanDocument1 pageRésumé For Arjun JayaramanArjun JayaramanNo ratings yet
- Vishwakarma Institute E&TC curriculumDocument37 pagesVishwakarma Institute E&TC curriculumAbhijeet KadamNo ratings yet
- Elec Grs Pumps 203seriesDocument5 pagesElec Grs Pumps 203serieschand_yelNo ratings yet
- 1.4 NN MP Neuron ModelDocument20 pages1.4 NN MP Neuron ModelSatyam RanaNo ratings yet
- Quality Gates Ensure Project SuccessDocument7 pagesQuality Gates Ensure Project Successbelkis rosaNo ratings yet
- Holiday Accident Reduction Program: SSGT 32 Comm/ElectDocument3 pagesHoliday Accident Reduction Program: SSGT 32 Comm/ElectSteven GarrisNo ratings yet
- D ch07Document50 pagesD ch07mullai03No ratings yet
- Step 4.1 Manage Incoming Data: Resources For Implementing The WWF Project & Programme StandardsDocument9 pagesStep 4.1 Manage Incoming Data: Resources For Implementing The WWF Project & Programme StandardsTran Thi HaiNo ratings yet
- Food Processing Machinery - Fixed Deck Oven Loaders - Safety and Hygiene RequirementsDocument50 pagesFood Processing Machinery - Fixed Deck Oven Loaders - Safety and Hygiene RequirementsSantosh IngaleNo ratings yet
- MP and MC Lab Solution ManualDocument48 pagesMP and MC Lab Solution ManualsukeerthNo ratings yet
- Three-Phase Electric Power - Wikipedia, The Free EncyclopediaDocument12 pagesThree-Phase Electric Power - Wikipedia, The Free EncyclopediaMohamed RafihNo ratings yet
- Labview & MatlabDocument7 pagesLabview & MatlabSuneet SahuNo ratings yet
- Best Practices For Tensorrt PerformanceDocument20 pagesBest Practices For Tensorrt PerformanceacabaNo ratings yet
- Mixed Signal Electronics IntroductionDocument32 pagesMixed Signal Electronics IntroductionMuhammad Waqas AliNo ratings yet
- 2.manual ETR300S V1.0 EngDocument142 pages2.manual ETR300S V1.0 EngAgustinus Phatub KurniawanNo ratings yet
- Literature Review For Petrol Station Management SystemDocument7 pagesLiterature Review For Petrol Station Management Systemc5qp53eeNo ratings yet
- WachsDocument64 pagesWachsJorgeNo ratings yet
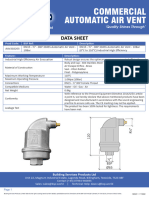
- BSP - Commercial AAV - 10bar - DataSheet - V1.1 - 11-2022Document1 pageBSP - Commercial AAV - 10bar - DataSheet - V1.1 - 11-2022j.iqubalNo ratings yet
- Control Gear Fluorescent Electronic EB-ECONOMY Electronic Ballasts For TLD LampsDocument6 pagesControl Gear Fluorescent Electronic EB-ECONOMY Electronic Ballasts For TLD LampsGary LauNo ratings yet
- ROMDAS ManualDocument327 pagesROMDAS Manualkumarnram0% (1)
- PCChips P53G Manual PDFDocument53 pagesPCChips P53G Manual PDFsander100% (1)