You might also like
- Neurobiology of Motor Control: Fundamental Concepts and New DirectionsFrom EverandNeurobiology of Motor Control: Fundamental Concepts and New DirectionsScott L. HooperNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Speed Control of A DC Motor Using BP Neural Networks: Zilong Liu Xianyi Zhuang Shuyi WangDocument4 pagesSpeed Control of A DC Motor Using BP Neural Networks: Zilong Liu Xianyi Zhuang Shuyi WangAnonymous hJbJ6TGGLNo ratings yet
- Process Control by On-Line Trained Neural Controllers: Transactions 39, 6, 1992Document11 pagesProcess Control by On-Line Trained Neural Controllers: Transactions 39, 6, 1992Ganesh Kumar ArumugamNo ratings yet
- Nonlinear System Control Using Neural Networks: Jaroslava Žilková, Jaroslav Timko, Peter GirovskýDocument10 pagesNonlinear System Control Using Neural Networks: Jaroslava Žilková, Jaroslav Timko, Peter Girovskýalexq_wolfNo ratings yet
- Real-Time Implementation of A Neuro-Avr For Synchronous Generator M. M. Salem A. M. Zaki O. P. MalikDocument6 pagesReal-Time Implementation of A Neuro-Avr For Synchronous Generator M. M. Salem A. M. Zaki O. P. MalikSuhail KhokharNo ratings yet
- Art N5 Luy p26-p29 PDFDocument4 pagesArt N5 Luy p26-p29 PDFsmprabu24317No ratings yet
- Physically Unclonable Functions Derived From Cellular Neural NetworksDocument23 pagesPhysically Unclonable Functions Derived From Cellular Neural Networkslibra_15octNo ratings yet
- ANN ControlDocument6 pagesANN ControlLissete VergaraNo ratings yet
- RBF BP JieeecDocument5 pagesRBF BP JieeecEyad A. FeilatNo ratings yet
- Intelligent Control of Non-Linear Dynamical SystemDocument9 pagesIntelligent Control of Non-Linear Dynamical SystemJEDPNo ratings yet
- Application of Artificial Neural Network (ANN) Technique For The Measurement of Voltage Stability Using FACTS Controllers - ITDocument14 pagesApplication of Artificial Neural Network (ANN) Technique For The Measurement of Voltage Stability Using FACTS Controllers - ITpradeep9007879No ratings yet
- Seminar Presentation On ANN in PSRDocument35 pagesSeminar Presentation On ANN in PSRvanyagupta_88100% (1)
- A Modified Self-Tuning Fuzzy-Neural Controller: Hsiao-Kang Hwang, Yu-Ju Chen, Chuo-Yean Chang, Rey-Chue HwangDocument5 pagesA Modified Self-Tuning Fuzzy-Neural Controller: Hsiao-Kang Hwang, Yu-Ju Chen, Chuo-Yean Chang, Rey-Chue Hwanganil kasotNo ratings yet
- A Brief Review of D-Forward Neural NetworksDocument8 pagesA Brief Review of D-Forward Neural NetworksDana AbkhNo ratings yet
- Correlation of EVL Binary Mixtures Using ANNDocument7 pagesCorrelation of EVL Binary Mixtures Using ANNDexi BadilloNo ratings yet
- Power Flow Analysis of RDS by Artificial Network Technique: Vaishali Holkar, Dr. Deepika MasandDocument5 pagesPower Flow Analysis of RDS by Artificial Network Technique: Vaishali Holkar, Dr. Deepika MasandMarcelo FreitasNo ratings yet
- Transient Stability Assessment of A Power System Using Probabilistic Neural NetworkDocument8 pagesTransient Stability Assessment of A Power System Using Probabilistic Neural Networkrasim_m1146No ratings yet
- Conference PPT 2Document29 pagesConference PPT 2Snehamoy DharNo ratings yet
- Multi-Machine Power System Fuzzy Stabilizer Design Using Cuckoo Search AlgorithmDocument5 pagesMulti-Machine Power System Fuzzy Stabilizer Design Using Cuckoo Search AlgorithmKhalid FarooqNo ratings yet
- Coordination Design PSS and TCSC Controller For Power System Stability Improvement Using CLA-PSO AlgorithmDocument10 pagesCoordination Design PSS and TCSC Controller For Power System Stability Improvement Using CLA-PSO Algorithmvinodkumar57No ratings yet
- Ann - Control System DC MotorDocument6 pagesAnn - Control System DC MotoredumacerenNo ratings yet
- Generator Excitation Control Using Local Model Networks: Et Al.Document29 pagesGenerator Excitation Control Using Local Model Networks: Et Al.Phil WhitemanNo ratings yet
- Direct Self Control of Induction Motor Based On Neural NetworkDocument9 pagesDirect Self Control of Induction Motor Based On Neural NetworksethukumarkNo ratings yet
- Ak Methodology NN Load ModelingDocument5 pagesAk Methodology NN Load ModelingKazi Mustafizur RahmanNo ratings yet
- A Brief Review of Feed-Forward Neural NetworksDocument8 pagesA Brief Review of Feed-Forward Neural NetworksYitayew TegodNo ratings yet
- Identification and Control of Nonlinear Systems Using Soft Computing TechniquesDocument5 pagesIdentification and Control of Nonlinear Systems Using Soft Computing TechniquesDo Duc HanhNo ratings yet
- Neural Networks in Automated Measurement Systems: State of The Art and New Research TrendsDocument6 pagesNeural Networks in Automated Measurement Systems: State of The Art and New Research TrendsEmin KültürelNo ratings yet
- A Model Reference Control Structure Using A Fuzzy Neural NetworkDocument22 pagesA Model Reference Control Structure Using A Fuzzy Neural NetworkMitchell Angel Gomez OrtegaNo ratings yet
- A For: Neural Network Controller Switching Power ConvertersDocument6 pagesA For: Neural Network Controller Switching Power ConvertersRihab HamdiNo ratings yet
- Inverted PendulumDocument13 pagesInverted PendulumadilktsNo ratings yet
- ANFIS Based Distillation Column Control: R. Sivakumar K. BaluDocument7 pagesANFIS Based Distillation Column Control: R. Sivakumar K. BaluEr Mayur PatilNo ratings yet
- Adaptive Neuro-Control: For Spacecraft Atiltude ControlDocument6 pagesAdaptive Neuro-Control: For Spacecraft Atiltude Controllastet_kNo ratings yet
- Distance Transmission Line Protection Based On Radial Basis Function Neural NetworkDocument4 pagesDistance Transmission Line Protection Based On Radial Basis Function Neural Networknauman_sadiq_1No ratings yet
- The System of Arc Lengths Regulation of An Electric Arc Furnace With A Neuro-ControllerDocument3 pagesThe System of Arc Lengths Regulation of An Electric Arc Furnace With A Neuro-ControllerpernetiNo ratings yet
- Speaker Recognition Using Pulse Coupled Neural NetworksDocument5 pagesSpeaker Recognition Using Pulse Coupled Neural NetworksKetan KalbhorNo ratings yet
- (Elearnica - Ir) - Adaptive ANN Control of Robot Arm Using Structure of Lagrange EquationDocument3 pages(Elearnica - Ir) - Adaptive ANN Control of Robot Arm Using Structure of Lagrange EquationTimothy BriggsNo ratings yet
- Powers Ys 800Document8 pagesPowers Ys 800makroumNo ratings yet
- Electromyography (EMG) Based Control For Shoulder Muscles: Long Doan Thanh, Nhon Phan Nguyen QuyDocument5 pagesElectromyography (EMG) Based Control For Shoulder Muscles: Long Doan Thanh, Nhon Phan Nguyen QuyPhan Nguyễn Quy NhơnNo ratings yet
- ANN Techniques For Power Consumption ForecastingDocument6 pagesANN Techniques For Power Consumption ForecastingobiebaeNo ratings yet
- Iee142 059Document6 pagesIee142 059Cristo_Alanis_8381No ratings yet
- Analysis of Neural and Fuzzy-Power Electronic ControlDocument9 pagesAnalysis of Neural and Fuzzy-Power Electronic ControlVisu TamilNo ratings yet
- Power Quality Through DPFCDocument6 pagesPower Quality Through DPFCradhika doraNo ratings yet
- Research Methods For Power System Stability Using Adaptive Neural Fuzzy Inference SystemsDocument7 pagesResearch Methods For Power System Stability Using Adaptive Neural Fuzzy Inference SystemsBharath ykNo ratings yet
- A New Control Strategy of A Wind Power Generation andDocument8 pagesA New Control Strategy of A Wind Power Generation andjnyagatoNo ratings yet
- THD 1Document5 pagesTHD 1ME SOUNDNo ratings yet
- Excitation Control of A Synchronous Machine Using Polynomial Neural NetworksDocument11 pagesExcitation Control of A Synchronous Machine Using Polynomial Neural NetworksNihar RoyNo ratings yet
- Real Time Stabilisation Triple Link Inverted: Pendulum Using Single Control InputDocument7 pagesReal Time Stabilisation Triple Link Inverted: Pendulum Using Single Control InputKuldeep KumarNo ratings yet
- Speed Control of DC Motor Using Neural Network ConfigurationDocument4 pagesSpeed Control of DC Motor Using Neural Network Configurationtariq76No ratings yet
- Luo ConverterDocument6 pagesLuo ConverterAndrei CocorNo ratings yet
- Control of Magnetic Levitation SystemDocument15 pagesControl of Magnetic Levitation SystemordekNo ratings yet
- 1, March 47: of ForDocument8 pages1, March 47: of Forcarlos gomez reyesNo ratings yet
- R T Time of Shunt: Eduction in The Ransient Active Filters Using Intelligent ControllersDocument8 pagesR T Time of Shunt: Eduction in The Ransient Active Filters Using Intelligent ControllersijscmcNo ratings yet
- Neural Network Controller For Asymmetric Cascaded Multilevel InverterDocument6 pagesNeural Network Controller For Asymmetric Cascaded Multilevel InverterdaisysheelaNo ratings yet
- Ann Case StudyDocument14 pagesAnn Case StudysuryaysNo ratings yet
- Application of RBF Neural Network in Sensorless Control of A.C. Drive With Induction MotorDocument11 pagesApplication of RBF Neural Network in Sensorless Control of A.C. Drive With Induction MotorLê Đức ThịnhNo ratings yet
- Adaptive Artificial Neural Network Based Control Strategy For Shunt Active Power FilterDocument7 pagesAdaptive Artificial Neural Network Based Control Strategy For Shunt Active Power FilterPradyumn ChaturvediNo ratings yet
- Excitation Control of A Turbo-Generator by Using Artificial Neural NetworksDocument13 pagesExcitation Control of A Turbo-Generator by Using Artificial Neural Networksapi-19799369No ratings yet
- Design of Power System Stabilizer Based On Adaptive Neuro-Fuzzy MethodDocument9 pagesDesign of Power System Stabilizer Based On Adaptive Neuro-Fuzzy MethodDodi AndriNo ratings yet
- Adaptive Power System Stabilizer Using ANFIS and Genetic AlgorithmsDocument6 pagesAdaptive Power System Stabilizer Using ANFIS and Genetic AlgorithmsSimiso MathonsiNo ratings yet
- Bocada GuideDocument24 pagesBocada GuideKarthikeyan SundaramNo ratings yet
- The Osint Cyber War 2021-02-22Document26 pagesThe Osint Cyber War 2021-02-22Carlos Alberto Mendes BetinhoNo ratings yet
- VIOFO A119 ManualeditedenlargedDocument1 pageVIOFO A119 Manualeditedenlargedhi.i.am noneNo ratings yet
- Rarejob Training Skill Assessment FAQs PDFDocument28 pagesRarejob Training Skill Assessment FAQs PDFSerene PalaceNo ratings yet
- 8a. Scratch-3.0-for-Inclusive-LearningDocument31 pages8a. Scratch-3.0-for-Inclusive-LearningAvram MarianNo ratings yet
- Sustainable Finance Esg Integration SolutionDocument5 pagesSustainable Finance Esg Integration SolutionRISHABH RAJ JAINNo ratings yet
- Ag ExtensionDocument101 pagesAg ExtensionWaren LlorenNo ratings yet
- Breaking The Fifth Wall-ExcerptDocument4 pagesBreaking The Fifth Wall-ExcerptGarlandArularNo ratings yet
- G U - ResumeDocument3 pagesG U - ResumeNaveen_naidu1No ratings yet
- Sikagrout®-114 Ae: Product Data SheetDocument3 pagesSikagrout®-114 Ae: Product Data SheetAlexander Jonas Zach ValdrizNo ratings yet
- HsDocument97 pagesHspihkkNo ratings yet
- Somerset West Tattersalls CC: Trading As Vegas BetsDocument8 pagesSomerset West Tattersalls CC: Trading As Vegas BetsBereng SekNo ratings yet
- GUIDE TO AUTOCAD BASICS 2d PlanningDocument38 pagesGUIDE TO AUTOCAD BASICS 2d PlanningJohn Nichole Hernandez DacanayNo ratings yet
- Pe 001Document216 pagesPe 001erivan bernardoNo ratings yet
- MCQ OsDocument5 pagesMCQ Oskushagra sharmaNo ratings yet
- Motor Terminology and Electrical Performance CharacteristicsDocument37 pagesMotor Terminology and Electrical Performance CharacteristicsErick Yael Alcantar MaresNo ratings yet
- Pangasinan State University Urdaneta Campus Urdaneta CityDocument11 pagesPangasinan State University Urdaneta Campus Urdaneta CityNephtali Pinos-anNo ratings yet
- Chapter TwoDocument5 pagesChapter Twoshelter kofi anloadeyNo ratings yet
- Final Mangonel Group ProjectDocument7 pagesFinal Mangonel Group ProjectAarohan Verma100% (2)
- System and Standard Functions For S7-300 and S7-400Document586 pagesSystem and Standard Functions For S7-300 and S7-400orgil02220100% (1)
- Came Ozak Pedestrian CatalogDocument116 pagesCame Ozak Pedestrian Cataloghusamzaki7No ratings yet
- Fyp ProposalDocument37 pagesFyp ProposalNimra AzharNo ratings yet
- Integrating Microsoft Access With Autocad VbaDocument19 pagesIntegrating Microsoft Access With Autocad VbaLuiz Paulo Cruz JrNo ratings yet
- ISO 39001 - Peter HartzellDocument33 pagesISO 39001 - Peter HartzellJosefinaGarcía100% (2)
- Muneeb Ur Rehman CVDocument2 pagesMuneeb Ur Rehman CVMuneebUrRehmanNo ratings yet
- Cummins Power Command IWatch100Document31 pagesCummins Power Command IWatch100Leo BurnsNo ratings yet
- B&R Automation Studio Target For SimulinkDocument76 pagesB&R Automation Studio Target For SimulinkAdrian MeleroNo ratings yet
- ShreemantoLahiri - v3Document1 pageShreemantoLahiri - v3Ayush SaxenaNo ratings yet
- Thermal Transfer / Direct Thermal Print Engine: MH241/MH341/MH641/ MH241T/MH341T/MH641T/ MH241P/MH341P/MH641P SeriesDocument14 pagesThermal Transfer / Direct Thermal Print Engine: MH241/MH341/MH641/ MH241T/MH341T/MH641T/ MH241P/MH341P/MH641P SeriesVladimir BorkovskiyNo ratings yet
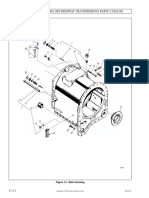
- Allison 5000/6000 Series Off-Highway Transmissions Parts CatalogDocument3 pagesAllison 5000/6000 Series Off-Highway Transmissions Parts CatalogMaya OlmecaNo ratings yet