You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Vol03 No04 PDFDocument8 pagesVol03 No04 PDFxendikaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Reference Guide To Fiber Optic Testing - Vol1Document172 pagesReference Guide To Fiber Optic Testing - Vol1xendikaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- s71200 Easy Book en-US en-US PDFDocument454 pagess71200 Easy Book en-US en-US PDFxendikaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Timing (Genlock) Adjustments in HDTV: The SetupDocument4 pagesTiming (Genlock) Adjustments in HDTV: The SetupxendikaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- D enDocument47 pagesD enxendikaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- DQ45CB Product Guide 01 EnglishDocument86 pagesDQ45CB Product Guide 01 EnglishFelipe RonfiniNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Teleproduction Test: A Primer in The Use of Waveform Monitors Part 2Document4 pagesTeleproduction Test: A Primer in The Use of Waveform Monitors Part 2xendikaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Ntsc/Pal Vectorscope: 3-Channel OperationDocument8 pagesNtsc/Pal Vectorscope: 3-Channel OperationxendikaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Teleproduction Test: A Primer in The Use of Waveform Monitors Part 1Document4 pagesTeleproduction Test: A Primer in The Use of Waveform Monitors Part 1xendikaNo ratings yet
- Fiber-Fundamentals - Guide-Volume-2 PDFDocument146 pagesFiber-Fundamentals - Guide-Volume-2 PDFsanjay angadiNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- D1500 Ownman v1 2Document28 pagesD1500 Ownman v1 2xendikaNo ratings yet
- KNX training requirementsDocument11 pagesKNX training requirementsxendikaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- D enDocument47 pagesD enxendikaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- 002 Lab2-Fa10Document4 pages002 Lab2-Fa10xendikaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- 002 Lab2-Fa10Document4 pages002 Lab2-Fa10xendikaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Milwaukee Area Technical College Electronic Technology Electronic Communications Lab Assignment 1 Introduction To The Frequency DomainDocument5 pagesMilwaukee Area Technical College Electronic Technology Electronic Communications Lab Assignment 1 Introduction To The Frequency DomainxendikaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- TM4C123 Launch Pad Users ManualDocument27 pagesTM4C123 Launch Pad Users Manualchamp1909No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- En Simit-Sce v7 ManualDocument45 pagesEn Simit-Sce v7 ManualxendikaNo ratings yet
- Analisis Profundo de SIPDocument87 pagesAnalisis Profundo de SIPxendikaNo ratings yet
- Linley 5gDocument4 pagesLinley 5ghelbakouryNo ratings yet
- Multimedia Hardware: Ms P KadebuDocument40 pagesMultimedia Hardware: Ms P Kadebusharon mkdauendaNo ratings yet
- Basics of MicrocontrollerDocument27 pagesBasics of MicrocontrollerPranshu Mishra100% (3)
- Microprocessors and Microcontrollers Formative AssessmentDocument98 pagesMicroprocessors and Microcontrollers Formative AssessmentAshesh B VigneshNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- What is a MicrocontrollerDocument3 pagesWhat is a MicrocontrollerPotato BitsNo ratings yet
- Tejas Micro 1 RTU Technical ManualDocument110 pagesTejas Micro 1 RTU Technical ManualAlex ProchotNo ratings yet
- 18CS44 Module3Document196 pages18CS44 Module3SharanKumarHuliNo ratings yet
- Lecture2 Progres in Silicon TechnologyDocument25 pagesLecture2 Progres in Silicon TechnologyKartika MunirNo ratings yet
- DSCE Microprocessor Test QuestionsDocument1 pageDSCE Microprocessor Test QuestionsAll_regNo ratings yet
- PA RISC All InfoDocument350 pagesPA RISC All InfoullassimonNo ratings yet
- 5Pen PC Tech Report: CPU, Comms, Keyboard, Camera, ProjectorDocument54 pages5Pen PC Tech Report: CPU, Comms, Keyboard, Camera, ProjectorSaivenkat0% (1)
- The Evolution of Information Access and Dissemination in the Information AgeDocument44 pagesThe Evolution of Information Access and Dissemination in the Information AgeVillamor PicsiwenNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Design and Development of an Energy Efficient Steering Wheel for a VehicleDocument10 pagesDesign and Development of an Energy Efficient Steering Wheel for a VehicleArema JrNo ratings yet
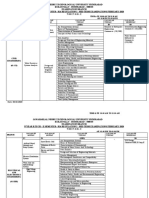
- JNTU Hyderabad Mid Term Exam Timetable Feb 2020Document19 pagesJNTU Hyderabad Mid Term Exam Timetable Feb 2020Hareesh HarshaNo ratings yet
- CS-101-Chapter 4 All PartDocument77 pagesCS-101-Chapter 4 All PartPAING LIN HTIKENo ratings yet
- Bbit 3304 Management of Information SystemsDocument105 pagesBbit 3304 Management of Information Systemsthomas onsongoNo ratings yet
- Ec8691 Microprocessors and Microcontrollers L T P CDocument1 pageEc8691 Microprocessors and Microcontrollers L T P CRaja SekarNo ratings yet
- Evolution of ProcessorsDocument91 pagesEvolution of ProcessorsVarshaNo ratings yet
- MPMC End 2018Document1 pageMPMC End 2018ar gNo ratings yet
- Project MicroprocessoresDocument22 pagesProject Microprocessoresshahd dawoodNo ratings yet
- Makalah Inside Computer BSIDocument17 pagesMakalah Inside Computer BSIWahyu Ramdani100% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Intel chipset driver DLLsDocument125 pagesIntel chipset driver DLLsDeepak SinghNo ratings yet
- Intel's (INTC) Management On Citi Global Tech Conference - Transcript - Seeking AlphaDocument3 pagesIntel's (INTC) Management On Citi Global Tech Conference - Transcript - Seeking AlphaAnonymous Ddnd7w1ANo ratings yet
- MPMC Full NotesDocument202 pagesMPMC Full Notesanon_760026317No ratings yet
- A+ 901 Student PDFDocument466 pagesA+ 901 Student PDFRené Eric Urbano EhijoNo ratings yet
- AI Overview: Huawei AI Academy Training MaterialsDocument41 pagesAI Overview: Huawei AI Academy Training MaterialsJohn SmithNo ratings yet
- The Basic Architecture of Computer SystemDocument30 pagesThe Basic Architecture of Computer SystemAnnie GloryNo ratings yet
- Core E4Document5 pagesCore E4janepriceNo ratings yet
- Computer History: Classification of Generations of ComputersDocument19 pagesComputer History: Classification of Generations of ComputersAnsar AnsarNo ratings yet
- Project Aardvark: Presentation To The Board of Directors January 29, 2010Document24 pagesProject Aardvark: Presentation To The Board of Directors January 29, 2010luvckNo ratings yet