International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 INTERNATIONAL JOURNAL OF MECHANICAL ENGINEERING 6340(Print), ISSN
N 0976 6359(Online), Volume 5, Issue 2, February (2014), pp. 08-16, IAEME
AND TECHNOLOGY (IJMET)
ISSN 0976 6340 (Print) ISSN 0976 6359 (Online) Volume 5, Issue 2, February (2014), pp. 08-16 IAEME: www.iaeme.com/ijmet.asp Journal Impact Factor (2014): 3.8231 (Calculated by GISI) www.jifactor.com
IJMET
IAEME
EXTRACTION OF NUMERICAL MODEL THROUGH OPTIMIZATION OF ANN MODEL FOR MANUALLY DRIVEN BRICK MAKING MACHINE
Mr. P. A. Chandak1,
1 2
Mr. J. P. Modak2
Asst. Professor, Mechanical Engineering, DMIETR, Wardha, India Emeritus Professor, Mechanical Engineering, PCE, Nagpur, India
ABSTRACT Considerable research work is carried in development of process units energized by Human Powered Flywheel Motor (HPFM). The process units tried so far are mostly rural based [12] such as wood turning, wood strip cutting, electricity generation, low head water lifting, etc. The HPFM comprises of three subsystems namely (i) HPFM, (ii) Torsionally flexible clutch and (iii) A Process Unit. Brick making is one of the processes and experiments were conducted to model the system in order to enhance its productivity. The experimental data based mathematical model was also formulated for the system, but the model could not predict the experimental findings accurately and precisely. The present research work utilizes artificial neural network (ANN) technique for modelling of brick making process. The author applies an exhaustive optimization technique which could be used for almost all applications under ANN modelling and emerges with unmatched result. The document extracts the mathematical model through optimized ANN model for the projected process of manufacturing of bricks and compares prediction through it. This technique of development of mathematical model could be engaged in future for production of controllers based on linear electronic circuit, microprocessor, etc. The article compares the predictions of experimental findings through previous empirical and ANN based mathematical model as well, enlightening the strength of ANN Modelling. Key Words: MATLAB, ANN Modelling, Mathematical Modelling, ANN parameters, etc.
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6359(Online), 6359(Online) Volume 5, Issue 2, February (2014), pp. 08-16, IAEME
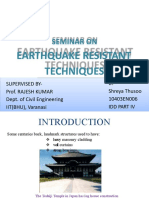
1. INTRODUCTION TO MANUALLY DRIVEN BRICK MAKING MACHINE riven Brick Making Machine 1.1. Working of Manually Driven A manually driven Auger-type type brick making [1] [2] [ [9] [10] machine developed by Dr. J. P. Modak is as shown in figure. The operator drives the flywheel (17) though chain (25) and a pair of gears (19, 20). The chain drive is utilized for first stage transmission because the drive is required to be irreversible. This is achieved ieved with the conventional bicycle drive with a free wheel (21). When the flywheel attains sufficient speed, the single jaw clutch (13, 15) is engaged. The clutch drives the auger screw through a pair of gears (9, 10). The mix fed through hopper (3). A cone cone (2) connects the drum (30) to the die (1). The cone eliminates the rotary motion of the mix before it enters the die. The extracted column is collected in a detachable mould (4). It is lined on the inside by Perspex to provide least resistance to motion of the column. The column is subsequently demoulded by placing it upside down on the platform. The mould is moved horizontally, leaving the column on the platform. About one or two hours after the column is laid on the platform, it becomes stiff enough to be cut by a cutter to form bricks of standard size.
1. DIE, 2. CONE, 3. HOPPER, 4. AL MOULD, 5. MOULDING STAND, 6. CONVEYOR SCREW, 7. CONVEYER SHAFT, 8. HOPPER, 9. GEAR, 10. PINION, 11. PINION SHAFT, 12. BEARING, MOVABLE HALF CLUTCH, 14.CLUTCH LEVER, 15.FIXED HALF CLUTCH, 16.FLYWHEEL SHAFT, 17.FLYWHEEL, 18, BEARING FOR FLYWHEEL, 19. PINION II, 20. GEAR II, 21. FREWHELL, 22. INTERMEDIATE SHAFT, 23. BEARING FOR INTERMEDIATE SHAFT, 24. CRANK GEAR, 25. PINION FOLLOWER CHAIN, 26. DRIVER SEAT, 27. HANDLE, 28. BRACKET, 29. FRAME, 30. CONVEYOR DRUM. Fig. 1. Manually Driven Brick Making Machine [1]
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6359(Online), Volume 5, Issue 2, February (2014), pp. 08-16, IAEME
Following process variables were involved in experimentation. variables is tabulated in Table I. TABLE I. Sr No. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
Symbols and type of
PROCESS VARIABLES WITH THEIR SYMBOLS [1] Type of variable Independent Independent Independent Independent Independent Independent Independent Independent Independent Independent Independent Independent Independent Independent Independent Independent Dependent Dependent Dependent Dependent Dependent Dependent Symbol WL Ws Wf Ww D1 D2 P D1 D3 LC LD I W G G S Sb Lb Te Lbm Pc T Dimension ML-1T-2 ML-1T-2 ML-1T-2 ML-1T-2 L L L L L L L ML2 T-1 LT-2 L ML-1T-2 L T L ML-1T-2 ML-1T-2
Description of variables Weight of lime Weight of sand Weight of flyash Weight of water Outside diameter of screw Inside diameter of screw Pitch of Screw Larger Diameter of Cone Smaller Diameter of Cone Length of cone Length of die Moment of Inertia of flywheel Angular velocity of flywheel Acceleration of due to gravity Gear ratio Length of square side of die Strength of brick Length of Extruded Brick Column Time of Extrusion Maximum length of Extruded Brick Column Critical Pressure of Extrusion Instantaneous Torque on the angular shaft
1.2. Experimental observations and Empirical Model The experimental observations [1] were recorded in tabulated form. As the variables involved were high in number dimensionless pi terms were evaluated. And an empirical model was generated to predict the experimental findings. The model was as follows [1].
/ 1 0.0043 /1 1.8091 12/ 0.139 0.2766 1/. 1.27 /1 1.977 / 11.3075 2 / 10.8313 (1) [2] The above equation (1) was derived through traditional methods of modelling and found unsatisfactory in prediction of experimental findings. This limits its further application in development of controller for the machine system. Hence it is required to adapt new modelling technique which could give better and satisfactory results in prediction of experimental and unseen data. The paper utilizes ANN modelling technique for modelling of machine system and emerges with inimitable solution to above defined problem.
10
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6359(Online), Volume 5, Issue 2, February (2014), pp. 08-16, IAEME
2. MODIFICATIONS IN THE DATABASE The experimental evidences developed during experimentation were very little in number. As a result experimental database was found to be insufficient for training and validation of the model generated though ANN simulation. In order to develop ANN model, the existing database was modified and improved in magnitude by maneuvering plots on the basis of present experimental evidences. The intermediate positions in the plot are positioned and noted [6]. This database generated is as follows. TABLE II. Sr. No. MODIFIED DATA [11] [3] Dependent Variables Lb / D1 1.174 0.854 1.455 0.203 0.995 1.157
Independent Variables LD/D1 0.2 0.5 0.5 0.5 0.5 0.5 D12/Ig.Wf 3.7 2.10 3.7 3.7 3.7 3.7 G 4.5 4.5 2.8 4.5 4.5 4.5
1 240 550 710 912 1555
(D1/g).W 9.19 9.19 9.19 2.84 9.19 9.19
Lc/ D1 0.5 0.5 0.5 0.5 0.43 0.5
P/ D1 0.24 0.24 0.24 0.24 0.24 0.24
D2 / D1 0.4 0.4 0.4 0.4 0.4 0.39
3. ARTIFICIAL NEURAL NEWORK (ANN) PARAMERS INVOLVED IN MODELLING Important ANN Parameters [4] [5] [6] involved in modeling through artificial neural network are as follows Network Topology Number of Layers in the network Number of Neurons Learning Algorithm Training Methods Activation functions/ Transfer Functions used Type of Networks Performance function
4. OPTIMIZATION THROUGH DISCIPLINED MODIFICATION OF ANN PARAMETERS The ANN parameters are sequentially modified as shown in table III and prediction through each model is examined through their plots. Every parameter posses its diversified standard values out of which some are chosen and their effects are observed after and during training. The table III shows the program number and respected value of each parameter. For each case of a program one parameter is varied and other parameters were allocated some constant standard value.
11
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6359(Online), Volume 5, Issue 2, February (2014), pp. 08-16, IAEME
Program Number P1 P2 P3 P4 P5 P6 P8 P9 P10 P11 P12 P13 P14 P15 P16 P17 P18 P19 P20 P21
TABLE III. SEQUENTIAL MODELLING EVALUATION [4] Types of transfer Type of function Hidden Training Performance layer Size 20 100 200 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 Function trainlm trainlm trainlm trainb trainbfg trainbr trainlm trainlm trainlm trainlm trainlm trainlm trainlm trainlm trainlm trainlm trainlm trainlm trainlm trainlm Function mse mse mse mse mse mse mae sse sse sse sse sse sse sse sse sse sse sse sse sse Layer1 logsig logsig logsig logsig logsig logsig logsig logsig tansig logsig logsig logsig tansig tansig logsig logsig logsig logsig logsig logsig Layer2 purelin purelin purelin purelin purelin purelin purelin purelin purelin purelin hardlim tansig logsig satlin satlin poslin tansig tansig tansig tansig
Type of Learning Algorithm learngd learngd learngd learngd learngd learngd learngd learngd learngd learngd learngd learngd learngd learngd learngd learngd learncon learngd learnh learnk
It is not possible to include all the graphs generated for each program because of limitations of the paper. Hence some of them are shown to understand the methodology of optimization.
Fig. 2. Percentage error with 100 Neurons [4]
12
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6359(Online), Volume 5, Issue 2, February (2014), pp. 08-16, IAEME
Fig. 3. Percentage error with training Function trainlm [4]
Fig. 4. Percentage error with performance Function sse [4]
Fig. 5. Percentage error with layer transfer Function logsig, tansig [4]
13
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6359(Online), Volume 5, Issue 2, February (2014), pp. 08-16, IAEME
Fig. 6. Percentage error with Learn Function learncon [4] 5. EXTRACTION OF NUMERICAL MODEL The optimized network has specific values of ANN parameters assigned to it. The network architecture [7] (fig7) shows the mathematics involved [5].
Fig. 7. Architecture of Artificial Neural Network for the optimized network. The numerical model extracted through optimized ANN model is as follows. Where, LW = Weight Matrix of Output layer of AN IW = Weight Matrix of Input layer of ANN Purelin = Function of Output layer of ANN .(2)
Ob = Bias Matrix of Output Layer of ANN Ib = Bias Matrix of Input Layer of ANN Tansig = Function of input layer of ANN
The above equation (2) [8] gives numerical statement for optimized ANN model for which the transfer functions are tansig and purelin assigned to input and output layer respectively. IW and LW are weight matrices multiplied respectively to input vectors of input layer and output layer. Transferring the above product matrix through transfer function gives output of each layer. The output of input layer becomes input for output layer.
14
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6359(Online), Volume 5, Issue 2, February (2014), pp. 08-16, IAEME
Fig. 8. Prediction of experimental findings with optimized ANN model The comparative analysis (fig 7) shows the close curves among the experimental findings and its predication though the numerical model.
Fig. 9. Percentage error in prediction through optimized ANN model 6. CONVERSATION ON RESULTS As the neuron size is amplified, error in prediction of experimental results decreases while higher neuron size leads to higher training time. Training styles have great influence on performance of the network. Hence it is to be picked appropriately. Performance function has little effect on prediction but wants to observe. Transfer functions plays key role in output of ANN model. Each layer has to assign a transfer function independently and their combination results to overall outcome. The numerical model developed gives very good results in prediction of experimental data.
15
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6359(Online), Volume 5, Issue 2, February (2014), pp. 08-16, IAEME
7. CONCLUSION The paper is illustrating methodology of optimization of ANN model and developing a numerical model through ANN modelling. This model has great affinity towards development of controller based on numerical model. Hence this method may be used in many of the application where researchers are striving to atomize any of the process fully or partially. 8. REFERENCES JOURNAL PAPERS: [1] Modak J P and Askhedkar R D Hypothesis for the extrusion of lime flash sand brick using a manually driven Brick making machine, Bulding Research and Information U.K., V22, N1, Pp 47-54, 1994 Modak J P and Bapat A R Manually driven flywheel motor operates wood turning machine, Contempory Ergonomics, Proc. Ergonomics Society annual convension 13-16 April, Edinburg, Scotland, Pp 352-357, 1993. Chandak P A, Modak J P, Optimization of artificial neural network model for improvement of artificial intelligence of manually driven brick making machine powered by HPFM, International Journal of Chaos, Control Modelling and Simulation, Vol 2, No 3, Sep 2013. Chandak P A, Lende A R, Modak J P, A literature review on Methodology & Fundamental of Development of mathematical model through Simulation of artificial neural network, International journal of computer application, Vol 4, issue 1, to be published, 2014.
[2]
[3]
[4]
BOOKS: [5] [6] [7] [8] S. N. Shvanandam, Introduction to Neural Network using Matlab 6.0, McGraw Hill publisher. Stamtios V. Kartaplopoulos , Understanding Neural Networks and Fuzzy Logics, IEEE Pres. Neural Network Toolbox TM 7 Users Guide R2010a, Mathworks.com Rudra Pratap, Getting Started with Matlab7, Oxford, First Indian Edition 2006.
THESIS: A. R. Bapat, Experimental Optimization of a manually driven flywheel motor, M.E. Thesis, VNIT, Nagpur. [10] A. R. Bapat, Experimentation of Generalized experimental model for a manually driven flywheel motor, PhD Thesis, VNIT, Nagpur. [11] P. A. Chandak.Modelling of Manually driven brick making machine through Artificial Neural Network, M. Tech. Thesis, PCE, Nagpur, 2007. PROCEEDINGS: [12] Modak J P, Human powered flywheel motor, Concept, Design, Dynamics and Applications, International Federation for the promotion of Mechanism and Machine Science, IFToMM, Proceedings of World Congress, 1987. [9]
16
You might also like
- Analyse The User Predilection On Gpay and Phonepe For Digital TransactionsDocument7 pagesAnalyse The User Predilection On Gpay and Phonepe For Digital TransactionsIAEME PublicationNo ratings yet
- Determinants Affecting The User's Intention To Use Mobile Banking ApplicationsDocument8 pagesDeterminants Affecting The User's Intention To Use Mobile Banking ApplicationsIAEME PublicationNo ratings yet
- A Study On The Reasons For Transgender To Become EntrepreneursDocument7 pagesA Study On The Reasons For Transgender To Become EntrepreneursIAEME PublicationNo ratings yet
- Gandhi On Non-Violent PoliceDocument8 pagesGandhi On Non-Violent PoliceIAEME PublicationNo ratings yet
- Impact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesDocument10 pagesImpact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesIAEME PublicationNo ratings yet
- Modeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyDocument14 pagesModeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyIAEME PublicationNo ratings yet
- Broad Unexposed Skills of Transgender EntrepreneursDocument8 pagesBroad Unexposed Skills of Transgender EntrepreneursIAEME PublicationNo ratings yet
- Voice Based Atm For Visually Impaired Using ArduinoDocument7 pagesVoice Based Atm For Visually Impaired Using ArduinoIAEME PublicationNo ratings yet
- Attrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesDocument15 pagesAttrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesIAEME PublicationNo ratings yet
- A Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaDocument9 pagesA Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaIAEME PublicationNo ratings yet
- A Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurDocument7 pagesA Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurIAEME PublicationNo ratings yet
- A Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiDocument16 pagesA Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiIAEME PublicationNo ratings yet
- Influence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiDocument16 pagesInfluence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiIAEME PublicationNo ratings yet
- Visualising Aging Parents & Their Close Carers Life Journey in Aging EconomyDocument4 pagesVisualising Aging Parents & Their Close Carers Life Journey in Aging EconomyIAEME PublicationNo ratings yet
- Role of Social Entrepreneurship in Rural Development of India - Problems and ChallengesDocument18 pagesRole of Social Entrepreneurship in Rural Development of India - Problems and ChallengesIAEME PublicationNo ratings yet
- EXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESDocument9 pagesEXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESIAEME PublicationNo ratings yet
- Financial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelDocument9 pagesFinancial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelIAEME PublicationNo ratings yet
- Quality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceDocument7 pagesQuality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceIAEME PublicationNo ratings yet
- Various Fuzzy Numbers and Their Various Ranking ApproachesDocument10 pagesVarious Fuzzy Numbers and Their Various Ranking ApproachesIAEME PublicationNo ratings yet
- Application of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDDocument19 pagesApplication of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDIAEME PublicationNo ratings yet
- Analysis On Machine Cell Recognition and Detaching From Neural SystemsDocument9 pagesAnalysis On Machine Cell Recognition and Detaching From Neural SystemsIAEME PublicationNo ratings yet
- A Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksDocument10 pagesA Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksIAEME PublicationNo ratings yet
- Dealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsDocument8 pagesDealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsIAEME PublicationNo ratings yet
- A Multiple - Channel Queuing Models On Fuzzy EnvironmentDocument13 pagesA Multiple - Channel Queuing Models On Fuzzy EnvironmentIAEME PublicationNo ratings yet
- Optimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsDocument13 pagesOptimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsIAEME PublicationNo ratings yet
- Knowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentDocument8 pagesKnowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentIAEME PublicationNo ratings yet
- Prediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsDocument13 pagesPrediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsIAEME PublicationNo ratings yet
- A Review of Particle Swarm Optimization (Pso) AlgorithmDocument26 pagesA Review of Particle Swarm Optimization (Pso) AlgorithmIAEME PublicationNo ratings yet
- Analysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsDocument13 pagesAnalysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsIAEME PublicationNo ratings yet
- Moderating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorDocument7 pagesModerating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorIAEME PublicationNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 2018 - 2017 Portfolio - Nyoman Anjani - MIT IDM 923364378 PDFDocument25 pages2018 - 2017 Portfolio - Nyoman Anjani - MIT IDM 923364378 PDFRendy PutraaaNo ratings yet
- Types of Ties For and Placement of Reinforcing SteelDocument8 pagesTypes of Ties For and Placement of Reinforcing Steelइंजि कौस्तुभ पवारNo ratings yet
- Inception Requirement Gathering and Risk AnalysisDocument1 pageInception Requirement Gathering and Risk AnalysisAmitfusion R13No ratings yet
- Top Branches at IIT BombayDocument111 pagesTop Branches at IIT BombayAdil Ali NirbanNo ratings yet
- Pages From Fundamentals of Electric Circuits 4th Ed - C. Alexander, M. Sadiku (McGraw-Hill, 2009) WWDocument2 pagesPages From Fundamentals of Electric Circuits 4th Ed - C. Alexander, M. Sadiku (McGraw-Hill, 2009) WWdabsorangejuiceNo ratings yet
- Bored Piles - 2020Document5 pagesBored Piles - 2020ngNo ratings yet
- Classification of Engineering ServicesDocument24 pagesClassification of Engineering ServicesPaul Vincent De GuzmanNo ratings yet
- Online Acces of Grades - RevisedDocument17 pagesOnline Acces of Grades - RevisedJennelie jandusayNo ratings yet
- Seminar On: Earthquake Resistant TechniquesDocument26 pagesSeminar On: Earthquake Resistant TechniquesrohitNo ratings yet
- Summer Training Project Report - PLCDocument28 pagesSummer Training Project Report - PLCNitish Bhardwaj84% (19)
- Concrete Pour Plan SummaryDocument19 pagesConcrete Pour Plan SummaryPablo Alejandro JrNo ratings yet
- Construction of Concrete Block Retaining Walls With StepsDocument8 pagesConstruction of Concrete Block Retaining Walls With Stepsvenkateswara rao pothinaNo ratings yet
- PCAB List of Licensed Contractors for CFY 2018-2019 as of 06 May 2019Document1,009 pagesPCAB List of Licensed Contractors for CFY 2018-2019 as of 06 May 2019tootfaceNo ratings yet
- Introduction To Reinforced ConcreteDocument29 pagesIntroduction To Reinforced ConcreteDarlene Kate MonterdeNo ratings yet
- IEEE 34 Node Test Feeder OverviewDocument6 pagesIEEE 34 Node Test Feeder OverviewLalex MoretaNo ratings yet
- Root Cause Analysis of Power Cable FailuresDocument14 pagesRoot Cause Analysis of Power Cable FailuresDenzil D'SouzaNo ratings yet
- Fatigue Analysis GuideDocument17 pagesFatigue Analysis GuideAna RuxandraNo ratings yet
- 2011.06.28 SN4X Construction Report-AnteriorDocument245 pages2011.06.28 SN4X Construction Report-AnteriorDennis Manuel Gutierrez Avila100% (4)
- T12 03 PDFDocument15 pagesT12 03 PDFjaimeenriquegarciaalvearNo ratings yet
- Pour StripsDocument2 pagesPour StripsChetan Tolia100% (1)
- Engineering and Development Corporation of The PhilippinesDocument4 pagesEngineering and Development Corporation of The Philippinesmark ignacioNo ratings yet
- Structural Design PDFDocument100 pagesStructural Design PDFDennoh Mbuthia100% (1)
- DSU Mechanical Engineering Timetable Fall 2020Document9 pagesDSU Mechanical Engineering Timetable Fall 2020Saad AhmedNo ratings yet
- SONL Plummer Block HousingsDocument48 pagesSONL Plummer Block HousingsLLNo ratings yet
- Orion Racing E-BrochureDocument20 pagesOrion Racing E-Brochuremonildoshi0% (1)
- Checklist PEZA PermitDocument2 pagesChecklist PEZA PermitmcdaleNo ratings yet
- ECS448 - Topic 1Document28 pagesECS448 - Topic 1dixn__No ratings yet
- ASIC Design Guidelines: Hauw Suwito, ConsultantDocument8 pagesASIC Design Guidelines: Hauw Suwito, ConsultantPrabakaran EllaiyappanNo ratings yet
- Iabse Paper 2015 PDFDocument8 pagesIabse Paper 2015 PDFfausto giovannardiNo ratings yet