You might also like
- Guía rápida ZapiWinConsoleDocument17 pagesGuía rápida ZapiWinConsoleLada LabusNo ratings yet
- Como Recuperar Archivos y Documentos Eliminados Del Disco DuroDocument6 pagesComo Recuperar Archivos y Documentos Eliminados Del Disco Durosamuelbg2012No ratings yet
- Instrucciones Examen WordDocument2 pagesInstrucciones Examen WordFran Gimeno100% (2)
- Prevención de Risesgos Laborales - Zárate Barrero Derly CatherineDocument12 pagesPrevención de Risesgos Laborales - Zárate Barrero Derly CatherineCatherine Zárate100% (1)
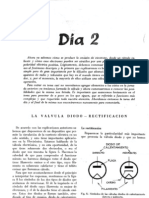
- Valvulas 2 DiodoDocument8 pagesValvulas 2 DiodoJPetro100% (4)
- A3 RRCM1Document17 pagesA3 RRCM1Rey CastilloNo ratings yet
- Apuntes de Electrotecnia I: Magnitudes eléctricasDocument54 pagesApuntes de Electrotecnia I: Magnitudes eléctricasjlupubarcoNo ratings yet
- Mplab Capitulo2Document43 pagesMplab Capitulo2Ing P CchNo ratings yet
- Curso Mplab Parte1Document18 pagesCurso Mplab Parte1Ing P CchNo ratings yet
- Redes - Modelo Iso-OsiDocument10 pagesRedes - Modelo Iso-OsiIng P CchNo ratings yet
- Amplificadores RF de PotenciaDocument10 pagesAmplificadores RF de PotenciaoldjanusNo ratings yet
- Mplab Capitulo3Document10 pagesMplab Capitulo3silviog100% (2)
- Apunte de Microprocesadores PICDocument7 pagesApunte de Microprocesadores PICJose Luis Lopez LeonNo ratings yet
- Wayne Tomasi - Sistemas de Comunicaciones ElectronicasDocument842 pagesWayne Tomasi - Sistemas de Comunicaciones ElectronicasNadia SanchezNo ratings yet
- Guia MPLAB MicrochipDocument18 pagesGuia MPLAB MicrochipArquimides De Dios DominguezNo ratings yet
- Medicion de Ruido Con OsciloscopioDocument3 pagesMedicion de Ruido Con OsciloscopioLolo fernandezNo ratings yet
- ControlOn OffDocument14 pagesControlOn OffCristian Gualan JImenezNo ratings yet
- Documento Cede 2003-16 ISSN 1657-7191 (Edición Electrónica) Julio de 2003Document39 pagesDocumento Cede 2003-16 ISSN 1657-7191 (Edición Electrónica) Julio de 2003Karim RamirezNo ratings yet
- Manual Estadistico Epidat 3.1Document20 pagesManual Estadistico Epidat 3.1Oscar GutierrezNo ratings yet
- Actividad de Aprendizaje 4.3 "Caso Laboratorio Farmacéutico"Document12 pagesActividad de Aprendizaje 4.3 "Caso Laboratorio Farmacéutico"Jehimy RochaNo ratings yet
- Tabla Aplicacion Productos Termoretractiles 3M EspañaDocument1 pageTabla Aplicacion Productos Termoretractiles 3M EspañaAlex RamirezNo ratings yet
- Cultura Organizacional en Gestion de Proyectos Obreval PDFDocument92 pagesCultura Organizacional en Gestion de Proyectos Obreval PDFSebastianRomeroGuayaraNo ratings yet
- Ej 12Document13 pagesEj 12Katherine Cárdenas100% (1)
- Fiabilidad 3.1Document21 pagesFiabilidad 3.1Enrique MoralesNo ratings yet
- Plan de Estudios Ingeniería IndustrialDocument3 pagesPlan de Estudios Ingeniería IndustrialMiguel LópezNo ratings yet
- ONE - Procesos EstocásticosDocument214 pagesONE - Procesos EstocásticosIván ReyesNo ratings yet
- Convocatoria Cursos Verano 2020 en LineaDocument3 pagesConvocatoria Cursos Verano 2020 en LineaCharly RomeroNo ratings yet
- Paso1 Grupo44 HeidyJulianaSanchezMartinezDocument6 pagesPaso1 Grupo44 HeidyJulianaSanchezMartinezKok LirNo ratings yet
- Articulo DE MECATRONICADocument1 pageArticulo DE MECATRONICAjose100% (1)
- TALLER DE NIVELES DE COMPRESIÓN LECTORA. (06-10-21) DocxDocument22 pagesTALLER DE NIVELES DE COMPRESIÓN LECTORA. (06-10-21) DocxJOEL SANCHESNo ratings yet
- KalfucuraDocument15 pagesKalfucuraIngridleBrustNo ratings yet
- Pasantias 1Document5 pagesPasantias 1EmmaMTineoNo ratings yet
- Taller Presentacion de Reportes CuantitativosDocument3 pagesTaller Presentacion de Reportes CuantitativosLaura Sofia Gonzalez VargasNo ratings yet
- MicrocontroladoresDocument5 pagesMicrocontroladoresJared DíazNo ratings yet
- Automatización de Las Oficinas y Las Soluciones Tecnológicas PDFDocument2 pagesAutomatización de Las Oficinas y Las Soluciones Tecnológicas PDFAlejandro100% (1)
- Juan Sebastian Andrade 2021Document19 pagesJuan Sebastian Andrade 2021ALBERTONo ratings yet
- La investigación sobre los suicidios en TecnocentroDocument6 pagesLa investigación sobre los suicidios en TecnocentroJavier Herbert Abarca LeonardoNo ratings yet
- Manual PowerPointDocument28 pagesManual PowerPointLaura Belen Mendoza HuancaNo ratings yet
- Curso Dreamweaver 91 VídeosDocument18 pagesCurso Dreamweaver 91 VídeosAlonso PreciadoNo ratings yet
- Cuestionario Resolución de ProblemasDocument3 pagesCuestionario Resolución de ProblemaspabloNo ratings yet
- Historia de Los VideojuegosDocument16 pagesHistoria de Los VideojuegosGabriel MoralesNo ratings yet
- Manual de Sony AspenDocument80 pagesManual de Sony Aspenpekitapepa85No ratings yet
- Manual de Dungeons 2Document40 pagesManual de Dungeons 2Brahian GarciaNo ratings yet