You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Sensor 1. Infrared SensorDocument2 pagesSensor 1. Infrared SensorVishu GroverNo ratings yet
- Bluetooth Module HCDocument1 pageBluetooth Module HCVishu GroverNo ratings yet
- FIRE SENSOR (Thermistor) :-: Normal Circuit Inverted CircuitDocument1 pageFIRE SENSOR (Thermistor) :-: Normal Circuit Inverted CircuitVishu GroverNo ratings yet
- PIC-IO Rev C1 SCHDocument1 pagePIC-IO Rev C1 SCHRafael Ricardo Zacarias CastilloNo ratings yet
- FuseDocument4 pagesFuseVishu GroverNo ratings yet
- 25.wireless Data CommunicationDocument57 pages25.wireless Data CommunicationmgitecetechNo ratings yet
- Minor Project-Laser Torch-Based Voice Transmitter and ReceiverDocument35 pagesMinor Project-Laser Torch-Based Voice Transmitter and ReceiverkutjohnNo ratings yet
- Project Report FormatDocument14 pagesProject Report FormatHimanshu GargNo ratings yet
- AdhocDocument1 pageAdhocSouma MukherjeeNo ratings yet
- Instrument Calibration BasicsDocument29 pagesInstrument Calibration BasicsPRAVEEN YADHAVNo ratings yet
- Line Follower Using AT89c51Document40 pagesLine Follower Using AT89c51api-26623078100% (6)
- Synopsis Bio Medical Monitoring SystemDocument10 pagesSynopsis Bio Medical Monitoring Systemsantu45No ratings yet
- AdhocDocument1 pageAdhocSouma MukherjeeNo ratings yet
- Chapter-1 Company Industrial Profile: Welcome To Digitech Solutions 1.1 VisionDocument25 pagesChapter-1 Company Industrial Profile: Welcome To Digitech Solutions 1.1 VisionVishu GroverNo ratings yet
- Ambient Light SchematicDocument1 pageAmbient Light SchematicVishu GroverNo ratings yet
- AutomaticDocument70 pagesAutomaticVishu GroverNo ratings yet
- PROJECT Report On Digital Code LockDocument21 pagesPROJECT Report On Digital Code LockVishu GroverNo ratings yet
- 8051 Dev BRD SchematicDocument8 pages8051 Dev BRD SchematicTom Jose ThomasNo ratings yet
- Flash Magic Manual New NSKDocument5 pagesFlash Magic Manual New NSKVishu GroverNo ratings yet
- Connect Max232 If Your Modem Does Not Have TTL Connections: RX - TX Goes To GSM ModemDocument2 pagesConnect Max232 If Your Modem Does Not Have TTL Connections: RX - TX Goes To GSM ModemVishu GroverNo ratings yet
- Ultrasonic Radar ProgramDocument137 pagesUltrasonic Radar ProgramNarendra Singh100% (2)
- Appointment LetterDocument2 pagesAppointment LetterVishu Grover100% (1)
- P 89 V 51 RD 2Document75 pagesP 89 V 51 RD 2ckprvn100% (2)
- PROJECT Report On Digital Code LockDocument21 pagesPROJECT Report On Digital Code LockVishu GroverNo ratings yet
- Minor Project-Laser Torch-Based Voice Transmitter and ReceiverDocument35 pagesMinor Project-Laser Torch-Based Voice Transmitter and ReceiverkutjohnNo ratings yet
- Instrument Calibration BasicsDocument29 pagesInstrument Calibration BasicsPRAVEEN YADHAVNo ratings yet
- Fire ManagementDocument1 pageFire ManagementVishu GroverNo ratings yet
- Minor Project-Laser Torch-Based Voice Transmitter and ReceiverDocument35 pagesMinor Project-Laser Torch-Based Voice Transmitter and ReceiverkutjohnNo ratings yet
- Fire ManagementDocument1 pageFire ManagementVishu GroverNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- USB in A NutShellDocument108 pagesUSB in A NutShellelectroprasanna100% (1)
- Tms Web Core: v1.9.5.0 Sentina Developers GuideDocument623 pagesTms Web Core: v1.9.5.0 Sentina Developers GuideDisooft SIGHNo ratings yet
- Oec 9600imaging Workstation Illustrated Parts ManualDocument95 pagesOec 9600imaging Workstation Illustrated Parts ManualJoe B BestialNo ratings yet
- Zebra Printer Z90 XiII, 140 XiII, 170 XiII, 220 XiII Parts & ServiceDocument165 pagesZebra Printer Z90 XiII, 140 XiII, 170 XiII, 220 XiII Parts & ServiceToddNo ratings yet
- Question Bank For DSSDocument7 pagesQuestion Bank For DSSNyamatulla PatelNo ratings yet
- How To Install TWRP Root Xiaomi Redmi Note 7 Pro (Violet) - TWRP UnofficialDocument3 pagesHow To Install TWRP Root Xiaomi Redmi Note 7 Pro (Violet) - TWRP UnofficialDanny GetNo ratings yet
- GSM Based Implementation of RFID Authentication Protocol Using ARMDocument3 pagesGSM Based Implementation of RFID Authentication Protocol Using ARMerpublicationNo ratings yet
- Lab 7 ReportDocument33 pagesLab 7 ReportNIKESH RANABHATNo ratings yet
- Info Tech Summary of Lesson 1 Grade 10Document2 pagesInfo Tech Summary of Lesson 1 Grade 10Kenya LevyNo ratings yet
- MechatronicsDocument8 pagesMechatronicsJeslet JoyNo ratings yet
- XBOX 360 Jtag and Modifying TutorialDocument31 pagesXBOX 360 Jtag and Modifying TutorialNumair Imran100% (2)
- IQVISIONDocument4 pagesIQVISIONAli AlghanimNo ratings yet
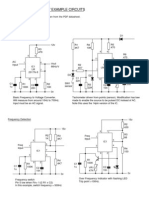
- LM2917 ExamplesDocument1 pageLM2917 ExamplesSergio RamosNo ratings yet
- Module 11 Local ReplicationDocument40 pagesModule 11 Local ReplicationVinoth Kumar100% (2)
- Dell Vostro 34603560Document8 pagesDell Vostro 34603560Dương Tấn QuốcNo ratings yet
- Ib Lite 2011 12 CpleibliDocument2 pagesIb Lite 2011 12 Cpleiblialexander900616No ratings yet
- COPA1 Stsem QBDocument44 pagesCOPA1 Stsem QBsahil chadha100% (1)
- Logitech MX Keys PDFDocument6 pagesLogitech MX Keys PDFJuan G.R.No ratings yet
- LB# 820-1372 - 051-6278 - A000.schematicDocument44 pagesLB# 820-1372 - 051-6278 - A000.schematicLuis SanchezNo ratings yet
- Matlab Fundamental 16Document9 pagesMatlab Fundamental 16duc anhNo ratings yet
- 3 Ece - PDC Unit - I PDFDocument64 pages3 Ece - PDC Unit - I PDFSree VamsiNo ratings yet
- Digital Clock Using 8051 Microcontroller With RTCDocument47 pagesDigital Clock Using 8051 Microcontroller With RTCsiddharthNo ratings yet
- Cds13190ev M190 VcuDocument8 pagesCds13190ev M190 VcuTeerajet Chumrunworakiat100% (1)
- Compact Tetra System PlannerDocument135 pagesCompact Tetra System PlannerHakunaMatata_76No ratings yet
- Drawbot Using Arduino UnoDocument17 pagesDrawbot Using Arduino UnoAnukriti LeeNo ratings yet
- TTSECDocument66 pagesTTSECerrr33No ratings yet
- Dual Slope ADCDocument3 pagesDual Slope ADCHero HeroNo ratings yet
- Bluetooth Based Home AutomationDocument17 pagesBluetooth Based Home AutomationShruthiNayerNo ratings yet
- Cobol Programming Guide - Igy5pg20Document910 pagesCobol Programming Guide - Igy5pg20viriathvsNo ratings yet
- TK110 ManualDocument5 pagesTK110 ManualPassengerDarkNo ratings yet