Professional Documents
Culture Documents
Elementi Cap 9
Uploaded by
gigiLombricoCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Elementi Cap 9
Uploaded by
gigiLombricoCopyright:
Available Formats
Giulio Cesare Barozzi
Giovanni Dore
Enrico Obrecht
Elementi di
Analisi Matematica
Volume 2
Versione preliminare 2013
Tutti i diritti riservati.
9
Concetti introduttivi
algebrici e geometrici
In questo Capitolo introduttivo vengono trattati alcuni argomenti di carattere alge-
brico e geometrico.
`
E probabile che lo studente li abbia gi`a incontrati, almeno in
parte, in corsi precedenti; tuttavia `e opportuno un loro studio accurato, anche allo
scopo di ssare simboli, notazioni e denizioni.
9.1. Spazi vettoriali
Sia n N
; indichiamo gli elementi di R
n
con simboli del tipo
x = (x
1
, x
2
, . . . , x
n
) , y = (y
1
, y
2
, . . . , y
n
) , . . . .
Useremo talvolta un linguaggio geometrico, parlando di punti di R
n
, anziche di
elementi. I numeri reali x
1
, x
2
, . . . , x
n
vengono detti le coordinate di un
punto
coordinate di x .
Deniamo la somma tra due elementi di R
n
e il prodotto tra un numero reale e
un elemento di R
n
.
9.1.1. Denizione. somma e prodotto
per scalare in R
n
Nellinsieme R
n
delle n -ple ordinate di numeri reali de-
niamo le seguenti operazioni. Se x = (x
1
, x
2
, . . . , x
n
), y = (y
1
, y
2
, . . . , y
n
) R
n
,
a R, poniamo
x +y = (x
1
+y
1
, x
2
+y
2
, . . . , x
n
+y
n
) , (9.1.1)
a x = (a x
1
, a x
2
, . . . , a x
n
) . (9.1.2)
Si osservi che il simbolo di somma al primo membro della (9.1.1) indica loperazione
di addizione in R
n
, mentre quelli al secondo membro indicano lanaloga operazione
in R; considerazioni dello stesso tipo possono essere fatte per la seconda uguaglianza.
9.1.2. Osservazione A rigore la moltiplicazione di un numero reale per un elemento
di R
n
non `e unoperazione in R
n
nel senso specicato alla ne della Sezione 0.5; si
tratta infatti di una funzione da R R
n
a R
n
.
9.1.3. Osservazione Nel caso n = 2 , la denizione di addizione ora data coincide
con quella relativa alladdizione tra numeri complessi (v. Def. 3.1.1).
9.1.4. Esempio Siano x, y R
2
, con
x =
_
2,
2
_
, y =
_
2
3
, 2
2
_
,
G. C. Barozzi G. Dore E. Obrecht
2 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
e a = 3 ; si ha:
x+y =
_
2 +
2
3
,
2 +
_
2
2
_
_
=
_
8
3
,
2
_
, ax =
_
32, 3
2
_
=
_
6, 3
2
_
.
Siano u, v R
3
, con
u = (1, 2, 4) , v =
_
3
2
,
1
4
, e
_
,
e b = 2 ; si ha:
u +v =
_
1 +
3
2
, 2 +
1
4
, 4 +e
_
=
_
5
2
,
7
4
, 4 +e
_
,
bu =
_
2 1, 2 (2), 2 4
_
= (2, 4, 8) .
Sono di verica immediata le propriet`a associativa e commutativa delladdizione:
x, y, z R
n
, (x +y) +z = x + (y +z) ;
x, y R
n
, x +y = y +x.
Lelemento neutro delladdizione `e 0 = (0, 0, . . . , 0) :
x R
n
, x +0 = 0 +x = x.
Ogni x = (x
1
, x
2
, . . . , x
n
) R
n
possiede un opposto, che `e unico, e viene indica-
to x; si ha x = (x
1
, x
2
, . . . , x
n
) :
x R
n
, x + (x) = (x) +x = 0.
Si ha poi, a, b R, x, y R
n
,
a(x +y) = ax +ay , (a +b) x = ax +bx,
a(b x) = (ab) x, 1 x = x.
Poniamo inoltre x y = x + (y) .
9.1.5. Teorema. Linsieme R
n
, munito delle operazioni (9.1.1) e (9.1.2), `e uno
spazio vettoriale reale, cio`e sul campo R.
Poiche R
n
`e uno spazio vettoriale (abbreviato s.v.), i suoi elementi vengono anche
detti vettore vettori.
Per indicare un vettore convenzione sulle
notazioni
utilizziamo sempre il carattere corsivo neretto. Nel se-
guito di questo Volume usiamo sistematicamente, e senza ulteriore avviso, la seguente
notazione: se c R
n
, indichiamo una sua coordinata con la stessa lettera in ca-
rattere corsivo chiaro, munita di un pedice numerico che ne indica la posizione; ad
esempio c
3
indica la terza coordinata del vettore c .
Ricordiamo, per comodit`a del lettore e per uniformare le notazioni, la denizione
di spazio vettoriale e gli aspetti pi` u importanti dellalgebra lineare che ci saranno utili
nel seguito.
9.1.6. Denizione. spazio vettoriale Siano K un campo e V un insieme non vuoto. Dicia-
mo che V `e uno spazio vettoriale sul campo K quando sono denite unopera-
zione +, detta addizione, e una funzione m, detta moltiplicazione per scalari,
+: V V V , m: KV V ,
che vericano le propriet`a seguenti:
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.1. Spazi vettoriali 3
(1) x, y, z V , (x +y) + z = x + (y +z) ,
(2) x, y V , x +y = y +x ,
(3) 0 V , tale che x V , x +0 = 0 +x = x,
(4) x V , x V , tale che x + (x) = x +x = 0 ,
(5) x, y V , a K, m(a, x +y) = m(a, x) +m(a, y) ,
(6) x V , a, b K, m(a +b, x) = m(a, x) +m(b, x) ,
(7) x V , a, b K, m
_
a , m(b, x)
_
= m(ab, x) ,
(8) x V , m(1, x) = x .
Gli elementi scalare del campo K vengono detti scalari.
Nel seguito, anziche scrivere m(a, x) , scriveremo semplicemente a x per indicare
il risultato della moltiplicazione dello scalare a per il vettore x . Per indicare la
somma dei vettori v
1
, . . . , v
p
useremo sistematicamente la notazione gi`a usata per i
numeri reali e complessi:
p
i=1
v
i
.
9.1.7. Osservazione Le seguenti propriet`a sono di facile verica:
a K, a 0 = 0; x V , 0 x = 0, (1) x = x;
qui 0 e 1 indicano gli elementi neutri di K.
9.1.8. Denizione. insieme
linearmente
indipendente,
linearmente
dipendente
Sia V uno spazio vettoriale sul campo K. Diciamo che un
insieme nito v
1
, v
2
, . . . , v
p
V `e linearmente indipendente quando, per ogni
c
1
, c
2
, . . . , c
p
K, da
p
i=1
c
i
v
i
= 0
segue che gli scalari c
i
sono tutti nulli. Si dice anche che i vettori v
1
, v
2
, . . . , v
p
sono linearmente indipendenti.
In caso contrario diciamo che linsieme v
1
, v
2
, . . . , v
p
`e linearmente dipen-
dente; ci`o signica che esistono p scalari d
1
, d
2
, . . . , d
p
K, non tutti nulli, tali
che
p
i=1
d
i
v
i
= 0 . In questo caso, si dice anche che i vettori v
1
, v
2
, . . . , v
p
sono
linearmente dipendenti.
Un vettore della forma
p
i=1
c
i
v
i
viene detto combinazione
lineare
combinazione lineare dellinsieme
di vettori v
1
, v
2
, . . . , v
p
e gli scalari c
1
, c
2
, . . . , c
p
vengono detti coecienti della
combinazione lineare. Pertanto linsieme v
1
, v
2
, . . . , v
p
`e linearmente indipenden-
te quando lunica combinazione lineare dei suoi elementi che si annulla `e quella che
ha tutti i coecienti nulli.
9.1.9. Esempio Nello spazio vettoriale R
2
consideriamo v
1
= (1, 1) , v
2
= (2, 1) ,
v
3
= (2, 2) . Linsieme v
1
, v
2
`e linearmente indipendente, mentre gli insiemi
v
1
, v
3
e v
1
, v
2
, v
3
sono linearmente dipendenti.
Infatti luguaglianza c
1
v
1
+c
2
v
2
= 0 si traduce nel sistema lineare omogeneo
_
c
1
+ 2c
2
= 0 ,
c
1
+c
2
= 0 ,
che ammette soltanto la soluzione nulla c
1
= c
2
= 0 . Si ha poi v
3
= 2v
1
, cio`e
2v
1
+v
3
= 0 e quindi 2v
1
+ 0 v
2
+v
3
= 0 .
G. C. Barozzi G. Dore E. Obrecht
4 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
9.1.10. Esempio Nello spazio vettoriale R
3
, siano v
1
= (1, 1, 2) , v
2
= (2, 0, 1) ,
v
3
= (2, 2, 0) , v
4
= (0, 2, 1) . Linsieme v
1
, v
2
, v
3
`e linearmente indipen-
dente, mentre linsieme v
2
, v
3
, v
4
`e linearmente dipendente.
Infatti luguaglianza c
1
v
1
+c
2
v
2
+ c
3
v
3
= 0 equivale al sistema omogeneo
_
_
c
1
+ 2c
2
2c
3
= 0 ,
c
1
2c
3
= 0 ,
2c
1
+c
2
= 0 ,
che ammette soltanto la soluzione nulla c
1
= c
2
= c
3
= 0 , in quanto il determinante
della matrice dei coecienti vale 8 .
Al contrario, luguaglianza c
2
v
2
+c
3
v
3
+c
4
v
4
= 0 equivale al sistema omogeneo
_
_
2c
2
2c
3
= 0 ,
2c
3
2c
4
= 0 ,
c
2
+c
4
= 0 ,
che ammette soluzioni non nulle; basta scegliere c
2
= c
3
, c
4
= c
3
. Ponendo, ad
esempio, c
3
= 1 , abbiamo c
2
= 1 , c
4
= 1 ; dunque v
2
+v
3
v
4
= 0 .
9.1.11. Denizione. sottospazio
vettoriale
Siano V uno spazio vettoriale sul campo K e W V .
Diciamo che W `e un sottospazio vettoriale (o anche, pi` u semplicemente, un sotto-
spazio) di V quando W , munito delladdizione e della moltiplicazione per scalari
ereditate da V , `e uno spazio vettoriale su K.
Non `e dicile mostrare il seguente risultato.
9.1.12. Teorema. Siano V uno spazio vettoriale sul campo K e W V .
Allora W `e un sottospazio vettoriale di V se, e solo se,
x, y W , a K, x +y W , a x W .
9.1.13. Osservazione Ogni sottospazio W di uno s.v. V contiene il vettore 0 ,
poiche, se x W , allora 0 x = 0 .
Sono evidentemente sottospazi dello s.v. V linsieme 0 e V stesso. Questi
sono detti i sottospazi sottospazio banale banali di V .
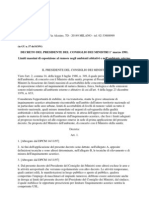
9.1.14. Esempio Linsieme W
1
= (t, t) R
2
[ t R `e un sottospazio di R
2
diverso dai sottospazi banali.
Figura 9.1.1
Il sottospazio W1 di R
2
denito nellEs. 9.1.14.
1
1
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.1. Spazi vettoriali 5
9.1.15. Esempio Sono esempi di sottospazi non banali di R
3
gli insiemi
W
2
=
_
(x, y, z) R
3
x + 2y + 3z = 0
_
, W
3
=
_
(x, y, z) R
3
x = 2y = 3z
_
.
9.1.16. Denizione. sottospazio
generato da un
insieme nito
Siano V uno s.v. sul campo K ed E = v
1
, v
2
, . . . , v
p
un sottoinsieme nito di V . Chiamiamo sottospazio generato da E linsieme
delle combinazioni lineari di elementi di E :
_
p
i=1
c
i
v
i
c
1
, c
2
, . . . , c
p
K
_
.
Indichiamo tale sottospazio col simbolo l(E) .
9.1.17. Osservazione La terminologia introdotta nella denizione precedente `e
appropriata, perche l(E) `e eettivamente un sottospazio vettoriale di V .
Infatti, se x =
p
i=1
c
i
v
i
l(E) , y =
p
i=1
d
i
v
i
l(E) e a K , risulta
x + y =
p
i=1
(c
i
+ d
i
) v
i
, a x =
p
i=1
(a c
i
) v
i
. Se ne conclude che l(E) `e un
sottospazio, in virt` u del Teor. 9.1.12.
9.1.18. Denizione. spazio vettoriale
nitamente
generato
Sia V uno spazio vettoriale sul campo K. Diciamo che V
`e nitamente generato se esiste un sottoinsieme nito E di V , tale che V = l(E) ;
in formule: esiste E = w
1
, w
2
, . . . , w
p
tale che
v V , c
1
, c
2
, . . . , c
p
K: v =
p
i=1
c
i
w
i
.
9.1.19. Osservazione Esistono spazi vettoriali che non sono nitamente generati.
Si consideri, ad esempio, linsieme T dei polinomi a coecienti reali, munito delle
usuali operazioni di somma e di moltiplicazione per un numero reale. Esso `e evi-
dentemente uno spazio vettoriale. Sia p
1
, p
2
, . . . , p
r
un insieme nito di polinomi;
detto m il massimo grado dei polinomi p
i
, ogni loro combinazione lineare
r
k=1
c
k
p
k
`e un polinomio di grado non superiore a m. Poiche in T esistono polinomi di grado
maggiore di m, ad esempio x
m+1
, linsieme nito considerato non genera T .
Uno s.v. viene s.v. di dimensione
nita, innita
anche detto di dimensione nita se `e nitamente generato, di
dimensione innita in caso contrario.
9.1.20. Denizione. base Siano V uno s.v. nitamente generato e B un suo
sottoinsieme nito. Diciamo che B `e una base per V quando:
(1) B `e linearmente indipendente;
(2) V = l(B) .
Pertanto una base di V `e un sottoinsieme nito linearmente indipendente che
genera tutto lo spazio. Se v
1
, v
2
, . . . , v
p
`e una base di V e x =
p
k=1
c
k
v
k
,
gli scalari c
k
sono univocamente determinati e vengono detti le componenti di un
vettore
componenti di x
nella base considerata. Infatti, se esistono c
1
, c
2
, . . . , c
p
e d
1
, d
2
, . . . , d
p
tali che
x =
p
k=1
c
k
v
k
=
p
k=1
d
k
v
k
, allora
0 =
p
k=1
c
k
v
k
p
k=1
d
k
v
k
=
p
k=1
(c
k
d
k
) v
k
;
poiche v
1
, . . . , v
p
`e linearmente indipendente, risulta c
k
= d
k
, per k = 1, 2, . . . , p .
Per gli spazi vettoriali di dimensione nita vale il seguente fondamentale risultato.
G. C. Barozzi G. Dore E. Obrecht
6 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
9.1.21. Teorema. Sia V uno s.v. nitamente generato, diverso dallo spazio
banale 0 . Allora V possiede una base e tutte le basi di V hanno lo stesso
numero di elementi.
La denizione che segue `e giusticata dal precedente teorema.
9.1.22. Denizione. dimensione di uno
spazio vettoriale
Sia V uno s.v. nitamente generato. Se V = 0 ,
diciamo che V ha dimensione 0 . Se V ,= 0 , diciamo che ha dimensione n ,
se n `e il numero degli elementi di una sua qualunque base. Indichiamo col simbolo
dimV la dimensione di V .
Dalla denizione di dimensione segue che un sottospazio di uno s.v. di dimensione n
ha dimensione minore o uguale a n .
Se V `e uno s.v. di dimensione n , ci si chiede se esistano insiemi costituiti da n
vettori che siano linearmente indipendenti ma non generano tutto V , oppure generano
tutto V pur essendo linearmente dipendenti. La risposta `e negativa per entrambe le
questioni. Vale infatti il
9.1.23. Teorema (dellalternativa). teorema
dellalternativa
In uno s.v. di V dimensione n , un insieme
di n vettori o `e una base oppure `e linearmente dipendente e non genera V .
Esaminiamo lo s.v. R
n
.
9.1.24. Teorema. Lo spazio vettoriale R
n
ha dimensione n .
Dimostrazione.
`
E suciente esibire una base costituita da n vettori. Poniamo
e
1
= (1, 0, 0, . . . , 0) ,
e
2
= (0, 1, 0, . . . , 0) ,
. . . . . . . . . . . . . . . . . . . . .
e
n
= (0, 0, 0, . . . , 1) .
A parole: per k = 1, 2, . . . n , tutte le coordinate di e
k
sono nulle, tranne la k -esima
che vale 1 . Linsieme e
1
, e
2
, . . . , e
n
`e linearmente indipendente. Infatti, sia
n
k=1
c
k
e
k
= 0,
con c
1
, c
2
, . . . , c
n
R. Scrivendo questa uguaglianza per coordinate si ottiene
c
1
= 0 , c
2
= 0 , . . . , c
n
= 0 .
Si ha poi, x = (x
1
, x
2
, . . . , x
n
) R
n
,
x = (x
1
, 0, . . . , 0) + (0, x
2
, . . . , 0) + + (0, 0, . . . , x
n
) =
= x
1
e
1
+x
2
e
2
+ +x
n
e
n
=
n
k=1
x
k
e
k
.
Dunque ogni x R
n
si pu`o scrivere come combinazione lineare dei vettori e
k
e
quindi l
_
e
1
, e
2
, . . . , e
n
_
= R
n
. Questo prova che e
1
, e
2
, . . . , e
n
`e una ba-
se di R
n
.
Poiche base canonica
di R
n
le componenti di x rispetto alla base esplicitata sono le coordinate di x
stesso, tale base viene detta la base canonica di R
n
.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.1. Spazi vettoriali 7
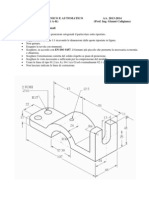
Per n = 3 , i vettori della base canonica vengono spesso indicati nei libri di Fisica
con le lettere i , j e k , rispettivamente.
Figura 9.1.2
I vettori e1 = (1, 0, 0) , e2 = (0, 1, 0) ,
e3 = (0, 0, 1) costituiscono la base cano-
nica di R
3
.
9.1.25. Esempio Sia C
n
linsieme delle n -ple ordinate di numeri complessi. Se
w = (w
1
, w
2
, . . . , w
n
) C
n
, z = (z
1
, z
2
, . . . , z
n
) C
n
e C, poniamo:
w +z = (w
1
+z
1
, w
2
+z
2
, . . . , w
n
+z
n
) ,
w = (w
1
, w
2
, . . . , w
n
) .
Linsieme C
n
, munito di queste operazioni `e uno spazio vettoriale sul campo C. Non
`e dicile dimostrare che C
n
ha dimensione n , denendo, in modo del tutto analogo
a R
n
, la base canonica.
Rileviamo esplicitamente che questo fatto non deve trarre in inganno; ad esem-
pio, C `e uno spazio vettoriale complesso di dimensione 1 , ma lo rappresentiamo
geometricamente mediante un piano, C
2
`e uno spazio vettoriale complesso di dimen-
sione 2 , ma dovrebbe essere pensato analogo a uno spazio reale a 4 dimensioni, ecc.
9.1.26. Esempio Consideriamo lo s.v. R
n
[x] costituito dai polinomi p
n
di grado
n a coecienti reali, tali cio`e che
p
n
(x) = a
0
+a
1
x +. . . +a
n
x
n
, a
k
R, k = 0, 1, . . . , n,
ivi compreso il polinomio identicamente nullo. Posto
f
0
: R R, f
0
(x) = 1 , f
k
: R R, f
k
(x) = x
k
, k = 1, 2, . . . , n,
risulta l ( f
0
, . . . , f
n
) = R
n
[x] . Inoltre, questi monomi sono anche linearmente
indipendenti; infatti, se a
0
, a
1
, . . . , a
n
R, luguaglianza
n
k=0
a
k
f
k
= 0 signica
x R, a
0
+a
1
x + +a
n
x
n
= 0 ,
da cui segue (v. il Principio di identit`a dei polinomi 3.5.13)
a
0
= a
1
= = a
n
= 0.
Se ne conclude che lo s.v. in esame ha dimensione n + 1 .
Considerazioni analoghe valgono per lo s.v. dei polinomi di grado n a coecienti
complessi.
In Analisi gli unici campi di scalari che presentano interesse sono R e C.
Concludiamo questa Sezione con un risultato molto importante.
G. C. Barozzi G. Dore E. Obrecht
8 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
9.1.27. Teorema. Siano V uno s.v. di dimensione n N
e F un suo sottoin-
sieme nito linearmente indipendente. Se F non `e una base per V , allora esiste
un sottoinsieme nito G di V , tale che F G `e una base di V .
Dimostrazione. Se F = v
1
, v
2
, . . . , v
p
non `e una base di V , allora esiste
y
1
V che non `e combinazione lineare degli elementi di F . Mostriamo che lin-
sieme F y
1
`e linearmente indipendente. Infatti, siano c
1
, c
2
, . . . , c
p+1
K, tali
che
p
i=1
c
i
v
i
+c
p+1
y
1
= 0.
Se fosse c
p+1
,= 0 , allora y
1
= (1/c
p+1
)
p
i=1
c
i
v
i
e quindi y
1
apparterreb-
be a l(F) , contrariamente allipotesi. Allora c
p+1
= 0 e quindi
p
i=1
c
i
v
i
= 0 ;
poiche F `e linearmente indipendente, ne consegue che tutti i c
k
sono nulli, come
si voleva. Pertanto F y
1
`e linearmente indipendente. Se la dimensione di V
`e p + 1 , allora F y
1
`e una base per V , per il Teorema dellalternativa 9.1.23.
In caso contrario, scegliamo y
2
V , che non pu`o essere scritto come combinazione
lineare degli elementi di F y
1
e ripetiamo il ragionamento precedente.
Iterando questa procedura, otteniamo un insieme linearmente indipendente di n
elementi, che pertanto costituisce una base di V .
9.2. Trasformazioni lineari
Le funzioni pi` u importanti che operano fra spazi vettoriali sono quelle lineari.
9.2.1. Denizione. trasformazione
lineare
Siano V e W s.v. sul campo K e T : V W . Diciamo
che la funzione T `e una trasformazione lineare o, pi` u semplicemente, che `e lineare
quando:
(1) x, y V , T(x +y) = T(x) +T(y) ;
(2) x V , a K, T(ax) = a T(x) .
Nel seguito indicheremo con /(V, W) linsieme delle trasformazioni lineari
da V a W .
9.2.2. Osservazione Anche la denizione posta abbia senso `e necessario che il
dominio di T sia uno s.v. Analogamente, anche i valori di T devono appartenere a
uno s.v.
9.2.3. Osservazione Dalla denizione precedente segue che, se T /(V, W) ,
x, y V , a, b K, T(ax +by) = a T(x) +b T(y) .
9.2.4. Osservazione Se S, T /(V, W) e a K, poniamo:
S +T : V W , (S +T)(x) = S(x) +T(x) ,
aT : V W , (aT)(x) = aT(x) .
Munito di queste operazioni, /(V, W) risulta uno s.v. su K.
9.2.5. Esempio Siano V e W s.v. sul campo K. Allora
T
1
: V W , T
1
(x) = 0,
`e una trasformazione lineare.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.2. Trasformazioni lineari 9
9.2.6. Esempio Sia V uno s.v. Allora
T
2
: V V , T
2
(x) = x,
`e una trasformazione lineare.
9.2.7. Esempio Sia
T
3
: R
2
R, T
3
(x, y) = 2x + 3y .
Allora T
3
`e una trasformazione lineare.
9.2.8. Esempio Sappiamo, dai Teor. 4.3.1 e 5.3.7, che C
1
(R, R) e C(R, R) sono
s.v. Sia
D: C
1
(R, R) C(R, R) , D(f) = f
;
allora D `e una trasformazione lineare.
9.2.9. Esempio Sia
INT : C([0, 1] , R) R, INT(f) =
_
1
0
f(x) dx;
allora INT `e una trasformazione lineare (v. Teor. 6.3.13).
9.2.10. Osservazione Siano V e W s.v. sul campo K e T /(V, W) . Allora
T(0) = 0 . Infatti, se x V , si ha
T(0) = T(x x) = T(x) T(x) = 0.
9.2.11. Teorema. Siano V , W e Z s.v. sul campo K. Se T /(V, W) e
S /(W, Z) , allora S T /(V, Z) .
Dimostrazione. Siano u
1
, u
2
V e a K; si ha:
(S T)(u
1
+u
2
) = S
_
T(u
1
+u
2
)
_
= S
_
T(u
1
) +T(u
2
)
_
=
= S
_
T(u
1
)
_
+S
_
T(u
2
)
_
= (S T)(u
1
) + (S T)(u
2
) ;
(S T)(a u
1
) = S
_
T(a u
1
)
_
= S
_
a T(u
1
)
_
= a S
_
T(u
1
)
_
= a(S T)(u
1
) .
Questo prova che S T `e lineare.
Vale il risultato seguente.
9.2.12. Teorema. Siano V e W s.v. sul campo K e T /(V, W) . Allora:
(1) limmagine di T `e un sottospazio vettoriale di W ;
(2) linsieme ker T = x V [ T(x) = 0 `e un sottospazio vettoriale di V .
Il simbolo ker `e unabbreviazione della parola inglese kernel, che signica nucleo.
Dimostrazione. Siano y
1
, y
2
T(V ) e a K; allora esistono x
1
, x
2
V , tali
che T(x
1
) = y
1
, T(x
2
) = y
2
. Si ha
y
1
+y
2
= T(x
1
) +T(x
2
) = T(x
1
+ x
2
) T(V ) ;
a y
1
= a T(x
1
) = T(a x
1
) T(V ) .
Per il Teor. 9.1.12 la prima aermazione `e provata.
G. C. Barozzi G. Dore E. Obrecht
10 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Siano u
1
, u
2
V , tali che T(u
1
) = T(u
2
) = 0 e a K. Si ha:
T(u
1
+u
2
) = T(u
1
) +T(u
2
) = 0 +0 = 0;
T(a u
1
) = a T(u
1
) = a0 = 0.
Ancora per il Teor. 9.1.12 anche la seconda aermazione `e provata.
9.2.13. Denizione. nucleo di una
trasformazione
lineare
Siano V e W s.v. sul campo K e T /(V, W) ; il
sottospazio ker T = x V [ T(x) = 0 di V si chiama nucleo di T .
Il prossimo risultato mostra che la verica delliniettivit`a di una trasformazione
lineare `e molto pi` u semplice rispetto allanaloga verica per una funzione arbitraria.
9.2.14. Teorema. Siano V e W s.v. sul campo K e T /(V, W) . Allora T
`e iniettiva se, e solo se, ker T = 0 .
Dimostrazione. Supponiamo T iniettiva. Poiche, per lOss. 9.2.10, T(0) = 0 ,
deve essere T(x) ,= 0 quando x ,= 0 ; quindi, ker T = 0 .
Viceversa, sia ker T = 0 ; consideriamo x
1
, x
2
V , tali che T(x
1
) = T(x
2
) .
Allora
T(x
1
x
2
) = T(x
1
) T(x
2
) = 0;
quindi x
1
x
2
ker T e allora x
1
= x
2
Questo prova che T `e iniettiva.
9.2.15. Teorema. Siano V e W s.v. sul campo K, T /(V, W) e
v
1
, v
2
, . . . , v
p
V . Se T `e iniettiva e v
1
, v
2
, . . . , v
p
`e linearmente indi-
pendente, allora anche T(v
1
), T(v
2
), . . . , T(v
p
) `e linearmente indipendente.
Dimostrazione. Siano c
1
, c
2
, . . . , c
p
K, tali che
0 =
p
i=1
c
i
T(v
i
) = T
_
p
i=1
c
i
v
i
_
.
Poiche T `e iniettiva, per il Teor. 9.2.14 risulta
p
i=1
c
i
v
i
= 0 e quindi, per la
lineare indipendenza dei v
i
, anche c
i
= 0 , per i = 1, 2, . . . , p . Ne segue che anche
T(v
1
), T(v
2
), . . . , T(v
p
) `e linearmente indipendente.
9.2.16. Teorema. Siano V e W s.v. sul campo K e supponiamo V di
dimensione nita. Se T /(V, W) , allora
dimT(V ) + dimker T = dimV .
In particolare, T(V ) ha dimensione nita e non superiore a quella di V .
Dimostrazione. La tesi `e banale se T `e nulla. Sia dunque T non nulla; supponia-
mo dapprima ker T = 0 e sia v
1
, v
2
, . . . , v
p
una base di V . Mostriamo che
T(v
1
), T(v
2
), . . . , T(v
p
) `e una base di T(V ) . La lineare indipendenza di questo
insieme segue dal Teor. 9.2.15, poiche in questo caso T `e iniettiva, per il Teor. 9.2.14.
Inoltre, se y T(V ) , x V , tale che T(x) = y . Siano c
1
, c
2
, . . . , c
p
K, tali
che x =
p
i=1
c
i
v
i
, da cui
y = T
_
p
i=1
c
i
v
i
_
=
p
i=1
c
i
T(v
i
) .
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.2. Trasformazioni lineari 11
Pertanto, l
_
T(v
1
), T(v
2
), . . . , T(v
p
)
_
= T(V ) . Quindi, in questo caso, si ha
dimT(V ) = dimV .
Se ker T ,= 0 , per il Teor. 9.1.21 esiste una base di ker T , sia v
1
, v
2
, . . . , v
k
.
Per il Teor. 9.1.27 esistono v
k+1
, v
k+2
, . . . , v
k+r
V , tali che v
1
, v
2
, . . . , v
k+r
`e
una base di V . Per dimostrare il teorema `e allora suciente provare che T(V ) ha
dimensione r . La restrizione di T a l
_
v
k+1
, v
k+2
, . . . , v
k+r
_
`e iniettiva, perche
T(x) = 0 implica che x `e combinazione lineare di v
1
, v
2
, . . . , v
k
; pertanto, per il
Teor. 9.2.15, linsieme T
_
v
k+1
, v
k+2
, . . . , v
k+r
_
`e linearmente indipendente. Inol-
tre, esso genera T(V ) . Infatti, sia y T(V ) ; allora x =
k+r
i=1
c
i
v
i
, tale che
T(x) = y . Si ha
y = T
_
k+r
i=1
c
i
v
i
_
=
k+r
i=1
c
i
T(v
i
) =
k+r
i=k+1
c
i
T(v
i
) ;
questo prova che dimT(V ) = r , come si voleva.
Nel resto di questa Sezione ci occupiamo di trasformazioni lineari da R
n
a R
m
,
cominciando col determinare tutte le trasformazioni lineari da R
n
a R.
Esaminiamo dapprima un caso molto semplice. Sia T /(R
2
, R) ; se u = (x, y) =
xe
1
+y e
2
R
2
, si ha
T(u) = T(xe
1
+y e
2
) = xT(e
1
) +y T(e
2
) = a
1
x +a
2
y ,
dove abbiamo indicato con a
i
il numero reale T(e
i
) . Quindi le trasformazioni lineari
da R
2
a R hanno la forma (x, y) a
1
x + a
2
y . Lo studente verichi il viceversa,
cio`e che, a
1
, a
2
R, la funzione (x, y) a
1
x +a
2
y `e lineare.
Sia ora T /(R
n
, R) . Se x =
n
i=1
x
i
e
i
, si ha
T(x) = T
_
n
i=1
x
i
e
i
_
=
n
i=1
x
i
T(e
i
) =
n
i=1
a
i
x
i
,
dove abbiamo indicato con a
i
il numero reale T(e
i
) . Quindi le trasformazioni lineari
da R
n
a R hanno la forma (x
1
, x
2
, . . . , x
n
)
n
i=1
a
i
x
i
. Lo studente verichi il
viceversa, cio`e che, a
1
, a
2
, . . . , a
n
R, la funzione (x
1
, x
2
, . . . , x
n
)
n
i=1
a
i
x
i
`e
lineare.
Pertanto T /(R
n
, R) se, e solo se, esistono a
1
, a
2
, . . . , a
n
R, tali che
T(x
1
, x
2
, . . . , x
n
) =
n
i=1
a
i
x
i
.
Riassumendo:
9.2.17. Teorema. Sia T /(R
n
, R) ; allora T(x
1
, x
2
, . . . , x
n
) =
n
i=1
a
i
x
i
,
dove a
i
= T(e
i
) per i = 1, 2, . . . , n .
Viceversa, se a R
n
, allora T : R
n
R, con T(x) =
n
i=1
a
i
x
i
, `e lineare.
Il teorema mostra che T(x) o `e la funzione nulla oppure `e un polinomio omogeneo
di primo grado nelle coordinate di x .
La denizione seguente introduce funzioni lineari da R
n
a R di particolare im-
portanza.
G. C. Barozzi G. Dore E. Obrecht
12 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
9.2.18. Denizione. proiezione su
un asse
Poniamo, per i = 1, 2, . . . , n ,
i
: R
n
R,
i
(x
1
, x
2
, . . . , x
n
) = x
i
;
pertanto,
i
associa a ogni vettore di R
n
la sua i -esima coordinata. Questa
funzione viene detta proiezione sull i -esimo asse.
9.2.19. Esempio Se u = (x, y) R
2
, si ha
1
(u) = x,
2
(u) = y .
Ad esempio, se u = (3, 5) , si ha
1
(u) = 3 ,
2
(u) = 5 .
Se v = (x, y, z) R
3
, si ha
1
(v) = x,
2
(v) = y ,
3
(v) = z .
Ad esempio, se v =
_
1, 1/2,
3
_
, si ha
1
(v) = 1 ,
2
(v) = 1/2 ,
3
(v) =
3 .
Sia T /(R
n
, R
m
) . Allora, se x R
n
, risulta T(x) R
m
e quindi
T(x) =
_
T
1
(x), T
2
(x), . . . , T
m
(x)
_
,
dove T
i
=
i
T .
`
E allora naturale scrivere T = (T
1
, T
2
, . . . , T
m
) . Le funzioni a
valori reali T
i
vengono dette le componenti della funzione vettoriale T .
La dimostrazione del risultato seguente `e immediata.
9.2.20. Teorema. Sia T /(R
n
, R
m
) , con T = (T
1
, T
2
, . . . , T
m
) . Allora
T
i
/(R
n
, R) , per i = 1, 2, . . . , m.
Viceversa, se S
i
/(R
n
, R) , per i = 1, 2, . . . , m, allora
S = (S
1
, S
2
, . . . , S
m
) /(R
n
, R
m
) .
Determiniamo tutte le trasformazioni lineari da R
n
a R
m
. Se T = (T
1
, T
2
, . . . , T
m
)
`e una di queste, per il Teor. 9.2.20 risulta T
i
/(R
n
, R) . Pertanto (v. Teor. 9.2.17)
esistono a
i1
, a
i2
, . . . , a
in
R, tali che, x R
n
, si ha
T
i
(x) =
n
k=1
a
ik
x
k
, i = 1, 2, . . . , m.
La trasformazione lineare `e quindi individuata dagli m n numeri reali a
ik
; `e del
tutto naturale organizzare tali numeri in una matrice. Per motivi che vedremo fra
poco `e opportuno considerare questa come una matrice con m righe e n colonne.
Poniamo dunque
A =
_
_
_
_
_
a
11
a
12
. . . a
1n
a
21
a
22
. . . a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
a
m2
. . . a
mn
_
_
_
_
_
.
Poiche il vettore x R
n
ha n componenti, `e opportuno pensarlo come una matrice
colonna, con n righe e 1 colonna. Tale identicazione sar`a utilizzata sistematica-
mente nel seguito. Osserviamo che, eettuando il prodotto righe per colonne della
matrice A per la matrice colonna x, il che `e lecito perche il numero delle colonne di
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.2. Trasformazioni lineari 13
A `e pari al numero delle righe di x, si ottiene
Ax =
_
_
_
_
_
a
11
a
12
. . . a
1n
a
21
a
22
. . . a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
a
m2
. . . a
mn
_
_
_
_
_
_
_
_
_
_
x
1
x
2
.
.
.
x
n
_
_
_
_
_
=
_
_
_
_
_
n
k=1
a
1k
x
k
n
k=1
a
2k
x
k
.
.
.
n
k=1
a
mk
x
k
_
_
_
_
_
=
_
_
_
_
_
T
1
(x)
T
2
(x)
.
.
.
T
m
(x)
_
_
_
_
_
= T(x) .
Dora in poi indicheremo con il simbolo /
m,n
(R) linsieme delle matrici reali
con m righe e n colonne, dette anche matrici di tipo m n . La matrice indicata
con A `e stata ottenuta a partire dalle funzioni T
i
e quindi a partire dalla funzione T .
La procedura, naturalmente, si pu`o invertire: se A /
m,n
(R) , allora essa
individua una funzione lineare T da R
n
a R
m
, quella denita da
T(x) = Ax,
dove Ax indica il prodotto righe per colonne di A per la matrice colonna x .
Osserviamo che ogni colonna della matrice A pu`o essere pensata come una matrice
colonna e quindi pu`o rappresentare un vettore di R
m
; in particolare,
_
_
_
_
_
a
11
a
21
.
.
.
a
m1
_
_
_
_
_
= T(e
1
) ,
cio`e la prima colonna della matrice A coincide col valore della funzione lineare T
nel primo vettore della base canonica. Analogamente, si ha
_
_
_
_
_
a
12
a
22
.
.
.
a
m2
_
_
_
_
_
= T(e
2
) ,
e cos` via.
Si ottiene quindi il seguente risultato.
9.2.21. Teorema. Sia T /(R
n
, R
m
) ; allora T(x) = Ax , dove A /
m,n
(R)
`e individuata dalle uguaglianze
_
_
_
_
_
a
1j
a
2j
.
.
.
a
mj
_
_
_
_
_
= T(e
j
) , j = 1, 2, . . . , n. (9.2.1)
Viceversa, se B /
m,n
(R) , la funzione
S : R
n
R, S(x) = Bx,
`e lineare.
La matrice A viene detta la matrice associata
a una
trasformazione
lineare
matrice associata a T rispetto alle basi canoniche
di R
n
e di R
m
. Poiche useremo quasi sempre le basi canoniche, diremo che la
matrice A `e associata a T , senza ulteriori precisazioni.
9.2.22. Teorema. Siano T
1
, T
2
/(R
n
, R
m
) , A
1
, A
2
le matrici ad esse asso-
ciate, a R; allora la matrice associata a T
1
+T
2
`e A
1
+A
2
, quella associata
ad aT
1
`e a A
1
.
G. C. Barozzi G. Dore E. Obrecht
14 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Siano T /(R
n
, R
m
) , S /(R
m
, R
p
) e siano A e B le matrici associate a
S e a T , rispettivamente; allora la matrice associata a S T `e AB (prodotto
righe per colonne).
Dimostrazione. La prima aermazione segue direttamente dal Teor. 9.2.21.
Occupiamoci della composizione di due trasformazioni lineari, che sappiamo essere
una trasformazione lineare in base al Teor. 9.2.11. Si ha, v R
n
e w R
m
,
T(v) = Bv , S(w) = Aw; allora
(S T)(v) = S
_
T(v)
_
= S(Bv) = A(Bv) = (AB)v.
Questo prova la seconda aermazione.
v R
n
S T
w = Bv R
m
Aw = ABv R
p
S
T
Figura 9.2.1
Composizione di due trasformazioni lineari.
9.2.23. Osservazione Facciamo notare che le matrici A e B considerate nella
dimostrazione del teorema precedente sono di tipo p m e mn , rispettivamente;
allora `e possibile eseguirne il prodotto AB , ottenendo una matrice p n .
9.3. Lo spazio euclideo R
n
In questa Sezione introduciamo una nuova struttura sullo s.v. R
n
, quella di spazio
euclideo; questa si realizza mediante lintroduzione del prodotto scalare.
9.3.1. Denizione. Siano x = (x
1
, x
2
, . . . , x
n
), y = (y
1
, y
2
, . . . , y
n
) R
n
; chia-
miamo prodotto scalare prodotto scalare di x e y il numero reale
x
y = x
1
y
1
+x
2
y
2
+ +x
n
y
n
=
n
k=1
x
k
y
k
. (9.3.1)
Lo spazio vettoriale R
n
, munito del prodotto scalare, viene detto spazio euclideo spazio euclideo
di dimensione n .
9.3.2. Osservazione A dierenza delladdizione tra vettori, il prodotto scalare, nel
caso pi` u signicativo n > 1 , non `e unoperazione in R
n
, cio`e una funzione da R
n
R
n
a R
n
, bens` `e una funzione da R
n
R
n
a R.
9.3.3. Esempio Siano x = (1, 3) , y = (1, 4) ; allora x
y = 1 (1) +3 4 = 11 .
9.3.4. Esempio Siano x =
_
1/2,
2, 3
_
, y = (1, 3, ) ; allora
x
y =
1
2
1 +
2 3 + 3 =
1
2
+ 3
_
2 +
_
.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.3. Lo spazio euclideo R
n
15
9.3.5. Teorema (propriet`a del prodotto scalare). propriet`a del
prodotto scalare
Valgono le seguenti propriet`a:
(1) x, y, z R
n
, (x +y)
z = x
z +y
z ;
(2) x, y R
n
, a R, (ax)
y = a (x
y) ;
(3) x, y R
n
, x
y = y
x;
(4) x R
n
, x
x 0 ; inoltre, x
x = 0 se, e solo se, x = 0 .
La dimostrazione del Teorema `e immediata. Le uguaglianze ai punti (1) e (2)
esprimono la linearit`a del prodotto scalare rispetto al primo argomento, mentre la (3)
stabilisce la commutativit`a del prodotto scalare; per questultima propriet`a, sussiste
la linearit`a anche rispetto al secondo argomento:
x
(y + z) = x
y +x
z , x
(a y) = a (x
y) .
Pertanto, si dice che il prodotto scalare `e una funzione bilineare da R
n
R
n
a R.
9.3.6. Osservazione Se T /(R
n
, R) , allora esiste a R
n
, tale che
x R
n
, T(x) = a
x.
Si tratta semplicemente di una rilettura del Teor. 9.2.17. In questo caso la matrice
associata a T `e
_
a
1
a
2
. . . a
n
_
=
t
a , cio`e la matrice riga trasposta di a .
9.3.7. Osservazione Il prodotto scalare ha un notevole signicato geometrico. Con-
sideriamo, per ora, solo il caso n = 2 ; allora i vettori x = (x
1
, x
2
) e y = (y
1
, y
2
) ,
che supponiamo diversi da 0 , possono essere identicati con i numeri complessi
x = x
1
+ix
2
e y = y
1
+iy
2
, rispettivamente. Esprimiamoli in forma polare
x = [x[ e
it
, y = [y[ e
is
,
dove t, s R. Si ha
x
y = x
1
y
1
+x
2
y
2
= Re(xy
) = Re
_
[x[e
it
[y[e
is
_
=
= [x[ [y[ Re
_
e
i(ts)
_
= [x[ [y[ cos(t s) .
Pertanto, il prodotto scalare di due vettori `e uguale al prodotto dei loro moduli
moltiplicato per il coseno dellangolo da essi formato. Se i vettori sono linearmente
dipendenti, tale coseno vale 1 oppure 1 e quindi il prodotto scalare `e uguale al
prodotto dei moduli ovvero allopposto di questo prodotto. Se invece formano un
angolo retto, il loro prodotto scalare `e nullo.
Losservazione precedente motiva la seguente denizione.
9.3.8. Denizione. vettori ortogonali Siano x, y R
n
; diciamo che i vettori x e y sono
ortogonali quando x
y = 0 .
9.3.9. Esempio In base alla denizione, il vettore nullo `e ortogonale a ogni vettore
di R
n
: infatti x R
n
, x
0 = 0 ; esso `e lunico vettore che goda di tale propriet`a.
9.3.10. Esempio I vettori di R
2
(1, 2) e (2, 1) sono ortogonali. I vettori di R
3
(1, 1, 2) , (1, 1, 1) e (2, 2, 0) sono a due a due ortogonali.
9.3.11. Esempio I vettori della base canonica sono a due due ortogonali; pi` u
precisamente si ha, come subito si verica,
e
h
e
k
=
_
0 , se h ,= k ,
1 , se h = k .
G. C. Barozzi G. Dore E. Obrecht
16 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
9.3.12. Osservazione Sia E = v
1
, v
2
, . . . , v
p
un insieme nito di vettori di
_
R
n
_
.
1
Se gli elementi di E sono a due a due ortogonali, cio`e v
i
v
j
= 0 , quando
i ,= j , allora E `e linearmente indipendente. Infatti, siano c
1
, c
2
, . . . , c
p
R, tali che
p
i=1
c
i
v
i
= 0.
Moltiplicando scalarmente entrambi i membri per il vettore v
k
, si ottiene
0 = 0
v
k
=
_
p
i=1
c
i
v
i
_
v
k
=
p
i=1
c
i
(v
i
v
k
) = c
k
v
k
v
k
;
poiche v
k
v
k
,= 0 , per la (4) del Teor. 9.3.5, ne deriva c
k
= 0 .
Il viceversa `e falso; vi sono insiemi linearmente indipendenti i cui elementi non sono
a due a due ortogonali. Ad esempio i vettori w
1
= (1, 0) e w
2
= (1, 1) non sono
ortogonali, perche w
1
w
2
= 1 ,= 0 ; per`o c
1
w
1
+c
2
w
2
= 0 signica (c
1
+c
2
, c
2
) = 0 ,
da cui c
1
= c
2
= 0 .
9.3.13. Denizione. norma Sia x R
n
; chiamiamo norma di x il numero reale non
negativo
|x| =
x =
_
n
k=1
x
2
k
. (9.3.2)
modulo
Talvolta la norma viene anche detta modulo del vettore.
9.3.14. Osservazione Per n = 1 la norma si riduce al valore assoluto in R; per
n = 2 la norma di x = (x
1
, x
2
) `e il modulo di (x
1
, x
2
) , pensato come numero
complesso.
9.3.15. Osservazione Se x ,= 0 , allora il vettore
1
|x|
x
ha norma uguale a 1 ; si dice anche che esso `e un versore versore di R
n
.
9.3.16. Teorema (propriet`a della norma). propriet`a della
norma
Valgono le seguenti propriet`a:
(1) x R
n
, si ha |x| 0 ; inoltre, |x| = 0 , se, e solo se, x = 0 ;
(2) a R, x R
n
, si ha |ax| = [a[ |x| ;
(3) x, y R
n
, si ha |x +y| |x| +|y| ;
(4) x, y R
n
, si ha
|x| |y|
|x y| ;
(5) x R
n
, [x
k
[ |x|
n
i=1
[x
i
[ , per k = 1, 2, . . . , n .
Dimostrazione. Le propriet`a (1) e (2) seguono subito dalla denizione. La prima
disuguaglianza della (5) segue subito dalla denizione di norma, mentre la seconda
segue dalla generalizzazione alla somma di n addendi della (4) del Teor. 0.6.13.
La (3) e la (4), come le disuguaglianze analoghe per il valore assoluto di un numero
reale (v. (3) e (4) del Teor. 0.6.8) e per il modulo di un numero complesso (v. (5)
e (6) del Teor. 3.1.10), viene detta disuguaglianza triangolare. Alla sua dimostrazione
premettiamo il seguente risultato, noto come disuguaglianza di Cauchy-Schwarz dai
1
Qui e nel seguito, se B R
n
, indichiamo col simbolo B
linsieme B \ { 0} .
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.3. Lo spazio euclideo R
n
17
nomi di Augustin Louis Cauchy (pi` u volte citato) e Hermann Amandus Schwarz
(1843-1921).
x
y
x +y
||x||
||y||
||x +y||
Figura 9.3.1
La norma della somma di due vettori non
supera la somma delle rispettive norme.
9.3.17. Teorema (disuguaglianza di Cauchy-Schwarz). disuguaglianza di
Cauchy-Schwarz
Siano x, y R
n
; allora
[x
y[ |x| |y| . (9.3.3)
Dimostrazione. La tesi `e ovvia se x = 0 o y = 0 . In caso contrario, supponiamo
anzitutto |x| = |y| = 1 . Si ha
0 |x y|
2
= (x y)
(x y) = |x|
2
2(x
y) +|y|
2
= 2 2(x
y) ;
pertanto x
y 1 . Visto che |x| = 1 , si ha anche (x
y) = (x)
y 1 .
Quindi [x
y[ 1 = |x| |y| .
In generale, se x, y
_
R
n
_
, i vettori x/|x| e y/|y| hanno norma 1 , pertanto,
per quanto gi`a dimostrato, si ha
[x
y[
|x| |y|
=
x
|x|
y
|y|
1 ,
da cui si ottiene immediatamente la (9.3.3).
9.3.18. Osservazione Nel caso |x| = |y| = 1 , questa dimostrazione prova anche
che si ha x
y = |x| |y| se, e solo se, |x y| = 0 , cio`e x = y . Da ci`o segue
che, se x, y
_
R
n
_
, si ha x
y = |x| |y| se, e solo se, x/|x| = y/|y| , cio`e
y =
_
|y|/|x|
_
x. Ci`o signica che x e y sono linearmente dipendenti e y = sx,
con s R
+
, cio`e y appartiene alla semiretta individuata da x.
In modo simile si verica che vale luguaglianza x
y = |x| |y| se, e solo se,
y = sx, con s R
.
Fine della dimostrazione del Teorema 9.3.16. Riprendiamo la dimostrazione
della (3). Poiche consideriamo una disuguaglianza tra numeri reali non negativi, per
il Teor. 0.6.4 essa `e equivalente a |x +y|
2
_
|x| +|y|
_
2
. In virt` u delle propriet`a
del prodotto scalare si ha
|x +y|
2
= (x +y)
(x +y) = |x|
2
+ 2(x
y) +|y|
2
|x|
2
+ 2 [x
y[ +|y|
2
|x|
2
+ 2 |x| |y| +|y|
2
=
_
|x| +|y|
_
2
.
Abbiamo sfruttato il fatto che ogni numero reale non supera il proprio valore assoluto
e successivamente la disuguaglianza di Cauchy-Schwarz (9.3.3).
G. C. Barozzi G. Dore E. Obrecht
18 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Rimane da dimostrare la (4), nota come seconda
disuguaglianza
triangolare
seconda disuguaglianza triangolare. Si ha
|x| = |x y +y| |x y| +|y| ,
cio`e
|x| |y| |x y| .
Scambiando y con x e tenendo presente che |x y| = |y x| , si ottiene
|y| |x| |x y| .
Le due disuguaglianze ottenute equivalgono alla (4).
Vale il Teorema di Pitagora, assieme al suo inverso.
9.3.19. Teorema (di Pitagora). teorema di
Pitagora
Siano x , y R
n
; allora
|x +y|
2
= |x|
2
+|y|
2
se, e solo se, x
y = 0 . (9.3.4)
Dimostrazione. Basta utilizzare luguaglianza, stabilita poco sopra,
|x +y|
2
= |x|
2
+ 2 (x
y) +|y|
2
.
Il Teorema di Pitagora si estende al caso di pi` u di due vettori: se x
1
, x
2
, . . . , x
r
sono r vettori a due a due ortogonali, r n , allora
_
_
_
_
_
r
k=1
x
k
_
_
_
_
_
2
=
r
k=1
|x
k
|
2
. (9.3.5)
Se r > 2 la (9.3.5) non implica lortogonalit`a dei vettori x
1
, x
2
, . . . , x
r
; ad esempio
i vettori v
1
= (1, 0, 0) , v
2
= (0, 1, 0) , v
3
= (1/
2, 1/
2, 0) di R
3
vericano tale
uguaglianza, ma non sono a due a due ortogonali.
9.3.20. Osservazione Se x e y sono vettori non nulli di R
3
e `e la misura
dellangolo convesso tra di essi, allora
x
y = |x| |y| cos , da cui cos =
x
y
|x| |y|
.
Laermazione `e stata provata nellOss. 9.3.18 se x e y sono linearmente dipendenti.
Figura 9.3.2
Il teorema del coseno consente di calcolare
la lunghezza di un lato di un triangolo a
partire dalle lunghezze dei due lati restanti
e dal coseno dellangolo compreso tra essi.
x
y
||x||
||y||
||x y||
0
In caso contrario, consideriamo il triangolo che ha per vertici lorigine e i punti x
e y ; per il Teorema del coseno,
|y x|
2
= |x|
2
+|y|
2
2 |x| |y| cos .
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.3. Lo spazio euclideo R
n
19
Poiche
|y x|
2
= (y x)
(y x) = y
(y x) x
(y x) =
= |y|
2
y
x x
y +|x|
2
= |x|
2
+|y|
2
2x
y ,
otteniamo x
y = |x||y| cos , come si voleva.
Lo stesso ragionamento vale anche in R
n
, con n N, n > 3 .
9.3.21. Denizione. base ortogonale,
base ortonormale
Sia w
1
, w
2
, . . . , w
n
una base di R
n
. Diciamo che essa
`e una base ortogonale quando w
i
w
j
= 0 , se i ,= j . Diciamo che essa `e una base
ortonormale quando
w
i
w
j
=
_
0 , se i ,= j ,
1 , se i = j .
LEs. 9.3.11 assicura che la base canonica di R
n
`e ortonormale.
Se w
1
, w
2
, . . . , w
n
`e una base ortogonale di R
n
, si possono calcolare con facilit`a
le componenti di un vettore in questa base. Infatti, se x R
n
, c
1
, c
2
, . . . , c
n
R,
tali che
x =
n
i=1
c
i
w
i
.
Moltiplicando scalarmente entrambi i membri di questa uguaglianza per il vettore w
j
,
otteniamo
x
w
j
=
_
n
i=1
c
i
w
i
_
w
j
=
n
i=1
c
i
(w
i
w
j
) = c
j
|w
j
|
2
,
da cui
c
j
=
x
w
j
|w
j
|
2
. (9.3.6)
Se la base considerata `e ortonormale, la formula precedente si semplica ulteriormente
c
j
= x
w
j
.
Pertanto, se w
1
, w
2
, . . . , w
n
`e una base ortonormale di R
n
e x R
n
,
x =
n
i=1
(x
w
i
) w
i
.
Per mezzo della norma, possiamo denire la distanza tra due punti di R
n
.
9.3.22. Denizione. distanza Siano x, y R
n
; chiamiamo distanza tra x e y il numero
reale non negativo
d(x, y) = |x y|. (9.3.7)
Si osservi che |x| = d(x, 0) .
9.3.23. Teorema. La funzione d: R
n
R
n
R
+
gode delle seguenti propriet`a:
(1) x, y R
n
, d(x, y) 0 ; inoltre, d(x, y) = 0 se, e solo se, x = y ;
(2) x, y R
n
, d(x, y) = d(y, x) ;
(3) x, y, z R
n
, d(x, z) d(x, y) +d(y, z) .
Occupiamoci inne di unoperazione denita solamente in dimensione 3: il prodotto
vettoriale; essa `e di grande di grande interesse per le applicazioni siche.
G. C. Barozzi G. Dore E. Obrecht
20 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
9.3.24. Denizione. prodotto vettoriale Siano a, b R
3
; il prodotto vettoriale di a e b (nellor-
dine) `e il vettore di R
3
a b = (a
2
b
3
a
3
b
2
, a
3
b
1
a
1
b
3
, a
1
b
2
a
2
b
1
) ,
2
(9.3.8)
cio`e il vettore che si ottiene sviluppando (formalmente) secondo gli elementi della
prima riga il determinante
det
_
_
e
1
e
2
e
3
a
1
a
2
a
3
b
1
b
2
b
3
_
_
= det
_
a
2
a
3
b
2
b
3
_
e
1
det
_
a
1
a
3
b
1
b
3
_
e
2
+ det
_
a
1
a
2
b
1
b
2
_
e
3
.
9.3.25. Esempio Si verica subito che
e
1
e
2
= e
3
, e
2
e
3
= e
1
, e
3
e
1
= e
2
e che a R
3
, a a = 0 .
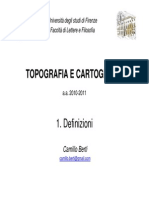
9.3.26. Esempio Siano a = (2, 1, 1) , b = (3/2, 2, 3/2) ; allora
a b = (1/2, 9/2, 11/2) .
Figura 9.3.3
Il prodotto vettoriale di
a = (2, 1, 1) e b = (3/2, 2, 3/2)
(in colore) `e
a b = (1/2, 9/2, 11/2)
(in nero).
x
1
x
2
x
3
Siano c = (1, 1, 2) , d =
_
1, 1,
2
_
; allora, c d =
_
2
2, 2 +
2, 2
_
.
9.3.27. Osservazione Se a e b sono vettori non nulli di R
3
e `e la misura
dellangolo convesso tra di essi, allora
|a b| = |a| |b| sin .
Infatti,
|a b|
2
= (a
2
b
3
a
3
b
2
)
2
+ (a
3
b
1
a
1
b
3
)
2
+ (a
1
b
2
a
2
b
1
)
2
=
= a
2
2
b
2
3
+a
2
3
b
2
2
2a
2
a
3
b
2
b
3
+a
2
1
b
2
3
+a
2
3
b
2
1
2a
1
a
3
b
1
b
3
+a
2
1
b
2
2
+a
2
2
b
2
1
2a
1
a
2
b
1
b
2
=
= a
2
1
(b
2
2
+b
2
3
) +a
2
2
(b
2
1
+b
3
3
) +a
2
3
(b
2
1
+b
2
2
) 2a
1
a
2
b
1
b
2
2a
1
a
3
b
1
b
3
2a
2
a
3
b
2
b
3
=
= |a|
2
|b|
2
a
2
1
b
2
1
a
2
2
b
2
2
a
2
3
b
2
3
2a
1
a
2
b
1
b
2
2a
1
a
3
b
1
b
3
2a
2
a
3
b
2
b
3
=
= |a|
2
|b|
2
(a
1
b
1
+a
2
b
2
+a
3
b
3
)
2
=
= |a|
2
|b|
2
(a
b)
2
= |a|
2
|b|
2
(1 cos
2
) = |a|
2
|b|
2
sin
2
,
dove, nel penultimo passaggio, abbiamo utilizzato lOss. 9.3.20. Di qui segue quanto
asserito.
2
In alcuni testi il prodotto vettoriale dei vettori a e b viene indicato con il simbolo a b .
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.3. Lo spazio euclideo R
n
21
a
a
b
b
a b
a b
e
1
e
1
e
3
e
3
e
2
e
2
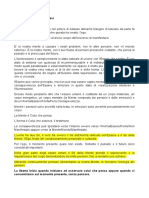
Figura 9.3.4
La norma del prodotto vettoriale di due vettori `e uguale allarea del parallelogramma costrui-
to su di essi. A sinistra abbiamo: a = (1, 3, 1) , b = (1/2, 2, 1) , a b = (1, 3/2, 7/2) ;
langolo tra i due vettori `e acuto: a
b = 13/2 > 0 . A destra abbiamo a = (1, 3, 1) ,
b = (1, 2, 1) , a b = (5, 2, 1) ; langolo tra i due vettori `e ottuso: a
b = 6 < 0 .
Geometricamente: la norma del prodotto vettoriale a b coincide con larea del
parallelogramma costruito sui vettori a e b .
Infatti, se uno dei vettori `e nullo, il prodotto vettoriale `e nullo; se a, b `e
linearmente dipendente, allora = 0 oppure = e il prodotto vettoriale `e nullo.
Supponiamo ora a, b linearmente indipendente. Se = /2 , a e b sono
ortogonali e il parallelogramma `e un rettangolo, la cui area `e |a| |b| = |a b| . Se
< /2 , |b| sin `e laltezza, rispetto alla base a , del parallelogramma, la cui area
`e |a b| = |a| |b| sin .
Se inne > /2 , |b| sin( ) = |b| sin `e laltezza, rispetto alla base a , del
parallelogramma, la cui area `e ancora |a| |b| sin = |a b| .
Semplici, anche se talvolta laboriose, veriche provano il risultato seguente.
9.3.28. Teorema. Siano a, b, c R
3
, , , R; valgono le propriet`a:
(1) a b = b a ;
(2) a ( b + c) = a b + a c, (a + b) c = a c + b c ;
(3) (a b)
a = (a b)
b = 0 ;
(4) a b = 0 se, e solo se, a e b sono linearmente dipendenti.
Dalle uguaglianze (3) segue che, se a, b R
3
, allora a b `e ortogonale sia ad a
che a b (e quindi anche a ogni loro combinazione lineare). Tali uguaglianze seguono
dal fatto che, per ogni terna di vettori a, b, c di R
3
si ha (con evidente signicato
dei simboli)
a
(b c) = b
(c a) = c
(a b) = det
_
_
a
1
a
2
a
3
b
1
b
2
b
3
c
1
c
2
c
3
_
_
.
Questo numero reale viene detto prodotto triplo prodotto triplo dei vettori a , b e c , nellordine.
Lo studente verichi che il valore assoluto del prodotto triplo `e uguale al volume del
parallelepipedo che ha un vertice nellorigine e i vettori a , b e c come spigoli.
Se a , b e c sono complanari, il loro prodotto triplo `e nullo.
G. C. Barozzi G. Dore E. Obrecht
22 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
9.4. Rette e piani in R
n
In questa Sezione scriviamo, in diverse forme, le equazioni di rette, piani e loro gene-
ralizzazioni in uno spazio euclideo di dimensione qualunque. Cominciamo con la de-
nizione di retta passante per lorigine; partendo da questa risulter`a agevole introdurre
gli altri concetti e le diverse forme di equazioni che ci servono.
9.4.1. Denizione. retta passante per
lorigine
Sia v
_
R
n
_
; chiamiamo retta passante per lorigine, di
vettore direttore v , linsieme
r = t v [ t R . (9.4.1)
Si verica immediatamente che tale retta `e un sottospazio vettoriale di dimensio-
ne 1 di R
n
e precisamente l
_
v
_
.
Diciamo che lequazione parametrica della retta r `e x = tv , dove il parametro
`e il numero reale t . La precedente equazione vettoriale equivale al sistema di n
equazioni scalari
_
_
x
1
= t v
1
,
x
2
= t v
2
,
.
.
.
.
.
.
x
n
= t v
n
.
(9.4.2)
Le equazioni parametriche forniscono una descrizione della retta r , perche indivi-
duano la funzione
g: R R
n
, g(t) = tv ,
di cui la retta `e limmagine.
La denizione di retta generica (non passante necessariamente per lorigine) si
ottiene dalla precedente con una traslazione.
9.4.2. Denizione. retta Siano c R
n
e v
_
R
n
_
; chiamiamo retta passante
per c di vettore direttore v linsieme
r = c +tv [ t R . (9.4.3)
e
3
e
v
c
c v
3
e
1
e
1
e
2
e
2
+
Figura 9.4.1
A sinistra: la retta in R
3
passante per lorigine, di vettore direttore v = (1, 1/2, 1) (in
colore); a destra: la retta passante per il punto c = (1/2, 1/2, 1) (in nero), avente lo stesso
vettore direttore.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.4. Rette e piani in R
n
23
Questa retta `e un laterale laterale
3
del sottospazio vettoriale l
_
v
_
. In questo caso,
lequazione parametrica della retta r `e x = c + tv , equivalente al sistema di n
equazioni scalari
_
_
x
1
= c
1
+t v
1
,
x
2
= c
2
+t v
2
,
.
.
.
.
.
.
x
n
= c
n
+t v
n
.
`
E ben noto dalla geometria elementare che per due punti distinti del piano passa
una e una e sola retta. Mostriamo che la stessa aermazione vale in un qualunque
spazio R
n
, con n 2 . Siano dunque a, b R
n
, con a ,= b . Se la retta cercata
passa per il punto a , essa ha equazione parametrica
x = a +tv ,
dove il vettore v
_
R
n
_
`e arbitrario. Imponendo che la retta passi anche per b ,
otteniamo che deve esistere s R tale che sia a + sv = b , da cui segue che v
e b a sono linearmente dipendenti. Scelto quindi, ad esempio, v = b a , la retta
di equazione parametrica x = a+t(ba) passa per i due punti dati. Le considerazioni
che ci hanno portato a scegliere il vettore direttore v mostra che due rette passanti
per a e per b devono passare per a e avere vettori direttori linearmente dipendenti;
pertanto le due rette coincidono.
Quanto precede suggerisce la denizione seguente.
9.4.3. Denizione. segmento Siano a, b R
n
, con a ,= b . Chiamiamo segmento di
estremi a e b linsieme
x R
n
[ x = a +t(b a), t [0, 1]
e lo indichiamo col simbolo [a, b] .
`
E evidente che tale segmento `e contenuto nella retta passante per a e b . Il
simbolo utilizzato per indicare un segmento coincide con quello utilizzato per indicare
un intervallo limitato e chiuso di R, ma il contesto non consentir`a di equivocare il
signicato.
Mostriamo, almeno per n = 2 e n = 3 , che le rette posseggono delle equazione
cartesiana di una
retta
equazioni
cartesiane, probabilmente pi` u familiari allo studente.
Sia n = 2 ; scriviamo x , y al posto di x
1
, x
2
e consideriamo il caso di una retta
passante per lorigine; siano
_
x = t v
1
,
y = t v
2
,
(9.4.4)
le sue equazioni parametriche. Poiche v ,= 0 , almeno una delle sue coordinate `e
diversa da 0 ; per ssare le idee supponiamo v
1
,= 0 . Allora, dalle (9.4.4), otteniamo
t =
x
v
1
,
che, sostituita nellaltra equazione, fornisce
y =
v
2
v
1
x,
da cui
v
1
y v
2
x = 0 ;
3
In luogo di laterale si dice anche sottospazio ane.
G. C. Barozzi G. Dore E. Obrecht
24 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
questa `e lequazione cartesiana di una retta passante per lorigine. Analogo risul-
tato avremmo ottenuto supponendo v
2
,= 0 . La procedura seguita ha portato
alleliminazione del parametro t dalle equazioni della retta.
Viceversa, sia a
_
R
2
_
e consideriamo
E =
_
(x, y) R
2
a
1
x +a
2
y = 0
_
;
si `e soliti dire che E `e individuato dallequazione cartesiana
a
1
x +a
2
y = 0 ; (9.4.5)
mostriamo che si tratta di una retta in R
2
, passante per lorigine. Infatti, poiche
a ,= 0 , almeno una delle sue coordinate `e diversa da 0 ; ad esempio, sia a
1
,= 0 .
Allora, otteniamo
x =
a
2
a
1
y
e quindi, ponendo t = y , ne deriva che i punti di E possono essere rappresentati
mediante le equazioni parametriche
_
x =
a
2
a
1
t ,
y = t .
Questa `e lequazione parametrica della retta passante per lorigine e di vettore diret-
tore (a
2
/a
1
, 1) .
Pertanto, lequazione parametrica e lequazione cartesiana sono due diversi modi
di rappresentare lo stesso linsieme.
Figura 9.4.2
La retta di equazione x+2y = 0 e il vettore
a essa normale a = (1, 2) .
a
e
1
e
2
Vogliamo segnalare il signicato geometrico del vettore a , le cui componenti
compaiono nella (9.4.5); poiche tale equazione pu`o essere scritta nella forma
a
(x, y) = 0 ,
essa rappresenta linsieme dei punti ortogonali al vettore a . Ne consegue che a `e un
vettore normale a
una retta
vettore normale (o, come anche si dice, ortogonale) a tutti (e soltanto) i punti della
retta r .
Questa rappresentazione mostra anche che una retta in R
2
passante per lorigine
`e il nucleo di una trasformazione lineare T /(R
2
, R) ; in questo caso si pu`o scegliere
T(x, y) = a
1
x +a
2
y .
Lequazione cartesiana di una retta passante per il punto c R
2
si ottiene dal-
la (9.4.5), traslando del vettore c la retta passante per lorigine; tale equazione
diventa quindi
a
1
(x c
1
) +a
2
(y c
2
) = 0 .
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.4. Rette e piani in R
n
25
Sia ora n = 3 e consideriamo il caso di una retta passante per lorigine; siano
_
_
x = t v
1
,
y = t v
2
,
z = t v
3
,
(9.4.6)
le sue equazioni parametriche. Poiche v ,= 0 , almeno una delle sue coordinate `e
diversa da 0 ; per ssare le idee supponiamo v
1
,= 0 . Allora, dalle (9.4.6) otteniamo
t =
x
v
1
,
che, sostituita nelle altre equazioni, fornisce
_
_
y =
v
2
v
1
x,
z =
v
3
v
1
x,
da cui
_
v
2
x v
1
y = 0 ,
v
3
x v
1
z = 0 ;
(9.4.7)
questo sistema di due equazioni scalari costituisce lequazione cartesiana di una ret-
ta. Analogo risultato avremmo ottenuto, supponendo v
2
,= 0 oppure v
3
,= 0 . La
procedura seguita ha portato alleliminazione del parametro t dalle equazioni della
retta. Si noti che la matrice dei coecienti del sistema (9.4.7)
_
v
2
v
1
0
v
3
0 v
1
_
ha rango 2 , perche la sottomatrice di ordine 2 formata con le ultime due colonne ha
determinante diverso da 0 , in quanto v
1
,= 0 .
Viceversa, sia
A =
_
a
11
a
12
a
13
a
21
a
22
a
23
_
una matrice di rango 2 e consideriamo linsieme
E =
_
(x, y) R
2
a
11
x +a
12
y +a
13
z = 0, a
21
x + a
22
y +a
23
z = 0
_
,
cio`e linsieme dei punti individuato dal sistema di equazioni cartesiane
_
a
11
x +a
12
y +a
13
z = 0 ,
a
21
x +a
22
y +a
23
z = 0 ;
(9.4.8)
mostriamo che E `e una retta passante per lorigine. Infatti, poiche A ha rango 2 ,
almeno uno dei suoi minori del secondo ordine `e diverso da 0 ; ad esempio, se la
sottomatrice
B =
_
a
11
a
12
a
21
a
22
_
ha determinante diverso da 0 , dalla (9.4.8) ricaviamo
_
x
y
_
= B
1
_
a
13
z
a
23
z
_
.
Se
B
1
=
_
d
11
d
12
d
21
d
22
_
,
G. C. Barozzi G. Dore E. Obrecht
26 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
linsieme E risulta descritto dalle equazioni parametriche
_
_
x = (d
11
a
13
+d
12
a
23
) t ,
y = (d
21
a
13
+d
22
a
23
) t ,
z = t .
Il sistema (9.4.8) assicura che una retta in R
3
passante per lorigine `e il nucleo di
una funzione lineare T /(R
3
, R
2
) ; in questo caso possiamo scegliere
T(x, y, z) = A
_
_
x
y
z
_
_
,
dove A `e la matrice 23 e di rango 2 associata a T . Ancora una volta lequazione
parametrica e lequazione cartesiana sono due diversi modi di rappresentare lo stesso
insieme.
Mediante una traslazione, otteniamo le equazioni parametriche e cartesiana di una
retta passante per il punto c , che sono, rispettivamente,
_
_
x = c
1
+t v
1
,
y = c
2
+t v
2
,
z = c
3
+t v
3
,
e
_
a
11
(x c
1
) +a
12
(y c
1
) + a
13
(z c
3
) = 0 ,
a
21
(x c
1
) +a
22
(y c
2
) + a
23
(z c
3
) = 0 .
(9.4.9)
Passiamo ora a esaminare i piani di R
3
.
9.4.4. Denizione. piano
passante per
lorigine
Siano v, w
_
R
3
_
, tali che v, w sia linearmente in-
dipendente; chiamiamo piano passante per lorigine, di vettori direttori v e w,
linsieme
= t v + s w [ t, s R . (9.4.10)
Osserviamo che = l
_
v, w
_
`e un sottospazio vettoriale di dimensione 2 di R
3
,
di cui v, w `e una base.
Diciamo che `e un piano coordinato piano coordinato quando esso `e generato da due vettori della
base canonica. Chiameremo piano xy quello generato dai vettori e
1
, e
2
, piano xz
quello generato dai vettori e
1
, e
3
, piano yz quello generato dai vettori e
2
, e
3
.
La (9.4.10) `e lequazione parametrica del piano (in forma vettoriale); essa
equivale a
_
_
x = t v
1
+s w
1
,
y = t v
2
+s w
2
,
z = t v
3
+s w
3
.
(9.4.11)
I parametri sono i due numeri reali t e s . Lequazione parametrica fornisce una
descrizione di , perche individua la funzione
g: R
2
R
3
, g(t, s) = t v +s w,
di cui `e limmagine.
Poiche v, w `e linearmente indipendente, la matrice
_
_
v
1
w
1
v
2
w
2
v
3
w
3
_
_
(9.4.12)
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.4. Rette e piani in R
n
27
v
w
e
3
e
1
Figura 9.4.3
Il piano in R
3
, passante per lorigine, in-
dividuato dai vettori v = (1, 1, 1) e w =
(1, 1/2, 1) .
ha rango 2 e pertanto esiste un suo minore del secondo ordine diverso da 0 ; sia, ad
esempio, det B ,= 0 , dove
B =
_
v
1
w
1
v
2
w
2
_
.
Se
B
1
=
_
d
11
d
12
d
21
d
22
_
,
allora
_
t = d
11
x +d
12
y ,
s = d
21
x +d
22
y ,
onde
z = (d
11
v
3
+d
21
w
3
)x + (d
12
v
3
+d
22
w
3
)y ;
questa `e lequazione cartesiana del piano .
Analogo risultato si sarebbe ottenuto supponendo diverso da 0 un altro minore
del secondo ordine della matrice (9.4.12).
9.4.5. Esempio Siano dati i piani passanti per lorigine di equazioni
_
x + y z = 0 ,
x + 2y +z = 0 ;
con i simboli usati poco sopra, abbiamo
A =
_
1 1 1
1 2 1
_
.
Scegliendo come B la sottomatrice formata con le prime due colonne di A, abbiamo
successivamente
B =
_
1 1
1 2
_
, B
1
=
_
2 1
1 1
_
,
_
x
y
_
= B
1
_
z
z
_
=
_
3z
2z
_
.
Dunque la retta intersezione `e rappresentata dalle equazioni parametriche
_
_
x = 3t ,
y = 2t ,
z = t .
G. C. Barozzi G. Dore E. Obrecht
28 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Viceversa, sia a
_
R
3
_
; allora linsieme
E =
_
(x, y, z) R
3
a
1
x +a
2
y +a
3
z = 0
_
`e un piano passante per lorigine. Infatti, supponiamo a
3
,= 0 ; allora,
z =
a
1
a
3
x
a
2
a
3
y ;
pertanto,
E =
_
(x, y, z) R
3
x = t, y = s, z =
a
1
a
3
t
a
2
a
3
s, (t, s) R
2
_
;
quindi E `e il piano passante per lorigine di equazioni parametriche
_
_
x = t ,
y = s ,
z =
a
1
a
3
t
a
2
a
3
s .
Vogliamo segnalare il signicato geometrico del vettore a , le cui componenti com-
paiono nella denizione di E ; lequazione che in essa compare pu`o essere scritta nella
forma
a
(x, y, z) = 0 ,
dunque a `e vettore
normale
a un piano
un vettore ortogonale a tutti (e solo) i punti del piano E ; si dice anche
che il vettore a `e normale al piano in esame (v. Fig. 9.4.4).
Questa rappresentazione mostra anche che un piano in R
3
passante per lorigine
`e il nucleo di una trasformazione lineare T /(R
3
, R) ; in questo caso possiamo
scegliere T(x, y, z) = a
1
x +a
2
y +a
3
z .
Figura 9.4.4
Il vettore a = (1, 1, 1) `e normale al piano
in R
3
, passante per lorigine, di equazione
x + y + z = 0 .
e
2
e
a
3
e
1
Lesempio seguente mostra unutilizzazione del prodotto vettoriale, introdotto nella
precedente Sezione, per passare dallequazione cartesiana di un piano passante per
lorigine alla sua rappresentazione parametrica.
9.4.6. Esempio Consideriamo un piano in R
3
, passante per lorigine, di equa-
zione cartesiana a
(x, y, z) = 0 ; poiche `e un sottospazio vettoriale di dimensione 2
di R
3
, vogliamo individuarne una base.
Se a `e proporzionale ad uno dei vettori della base canonica, allora una base di
`e costituita dai rimanenti vettori della base canonica; ad esempio, se a = (0, 0, 1) ,
una base di `e e
1
, e
2
.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.4. Rette e piani in R
n
29
Se a non `e proporzionale ad alcun vettore della base canonica, ma appartiene
a uno dei piani coordinati, allora possiamo scegliere come di base di il vettore
della base canonica ortogonale al piano coordinato in questione e il prodotto vetto-
riale di questo con a ; ad esempio, se a = (1, 1, 0) , possiamo scegliere come base
e
3
, a e
3
= (0, 0, 1), (1, 1, 0) .
Inne, se a non appartiene ad alcun piano coordinato, possiamo scegliere come
vettori di una base di i prodotti vettoriali di a con due vettori qualunque della
base canonica:
v = a e
1
, w = a e
2
;
il piano generato da v e da w `e
_
x R
3
x = t v +s w, t, s R
_
.
Ad esempio, se a = (1, 1, 1) , il piano ha equazione cartesiana x +y +z = 0 ; una
sua base `e costituita dai vettori
v = a e
1
= (0, 1, 1) , w = a e
2
= (1, 0, 1) ,
e le sue equazioni parametriche sono
_
_
x = s ,
y = t ,
z = t +s .
Il vettore v appartiene alla retta intersezione tra il piano dato e il piano coordina-
to yz , il vettore w appartiene alla retta intersezione tra il piano dato e il piano
coordinato xz .
e
3
e
1
e
2
v
vw
Figura 9.4.5
Il piano di equazione x+y+z = 0 , conside-
rato nellEs. 9.4.6, pu`o essere rappresentato
parametricamente come
x = t v + s w,
con v = (0, 1, 1) , w = (1, 0, 1) .
La denizione di piano arbitrario (non passante necessariamente per lorigine) si
ottiene dalla precedente con una traslazione.
9.4.7. Denizione. piano Siano c R
3
, v, w
_
R
3
_
, tali che v, w sia linear-
mente indipendente; chiamiamo piano passante per c di vettori direttori v e w
linsieme
= c +t v +s w [ t, s R . (9.4.13)
G. C. Barozzi G. Dore E. Obrecht
30 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Questo piano `e un laterale del sottospazio vettoriale precedentemente considerato.
Le equazioni parametriche e cartesiana di un piano passante per il punto c R
3
si
ottengono immediatamente per traslazione del vettore c ; esse sono, rispettivamente
_
_
x = c
1
+t v
1
+ s w
1
,
y = c
2
+t v
2
+ s w
2
,
z = c
3
+t v
3
+ s w
3
,
e
a
1
(x c
1
) +a
2
(y c
2
) +a
3
(y c
3
) = 0 .
Le considerazioni svolte sui piani di R
3
consentono di interpretare lequazione
cartesiana della retta (9.4.9) come lintersezione di due piani; tali piani non sono
paralleli, perche la matrice dei coecienti del sistema in oggetto ha rango 2 .
piani paralleli
Due piani sono paralleli quando sono entrambi laterali dello stesso sottospazio
vettoriale; in tal caso essi coincidono oppure non hanno punti in comune.
Nel caso dellequazione cartesiana della retta (9.4.9), i punti di una retta passante
per lorigine sono ortogonali sia ai vettori ortogonali al primo piano, sia a quelli
ortogonali al secondo piano.
A questo punto, seguendo lo schema utilizzato per rette e piani, `e possibile denire
anche enti geometrici lineari di dimensione qualunque, purche minore della dimensione
dello spazio euclideo in cui stiamo operando.
9.4.8. Denizione. k -piano passante
per lorigine
Siano k 1, 2, . . . , n1 , v
1
, v
2
, . . . , v
k
R
n
linearmen-
te indipendenti. Chiamiamo k -piano (o anche piano di dimensione k ) passante
per lorigine e di vettori direttori i v
i
linsieme
_
k
i=1
t
i
v
i
t
i
R, i = 1, 2, . . . , k
_
= l
_
v
i
[ i = 1, 2, . . . , k
_
.
Se k = 1 abbiamo una retta, se k = 2 un piano ordinario. Chiamiamo iperpiano iperpiano
un piano di dimensione n 1 .
Le equazioni parametriche di un k -piano contengono pertanto k parametri reali.
Lo studente dovrebbe vericare che le equazioni cartesiane di un k -piano sono formate
da un sistema di n k equazioni lineari linearmente indipendenti; in particolare, un
iperpiano `e individuato da una sola equazione cartesiana.
La generalizzazione a k -piani non passanti per lorigine non presenta dicolt`a.
Le considerazioni svolte in questa Sezione ci suggeriscono di introdurre la nozione
di complemento ortogonale di un sottospazio di R
n
.
9.4.9. Denizione. complemento
ortogonale
Sia V un sottospazio di R
n
; il suo complemento ortogonale
`e linsieme dei vettori di R
n
che sono ortogonali a ogni vettore di V :
V
= w R
n
[ w
v = 0 , v V .
`
E immediato vericare che V
`e un sottospazio di R
n
; se w
1
, w
2
V
e
c
1
, c
2
R, allora
v V , (c
1
w
1
+c
2
w
2
)
v = c
1
(w
1
v) +c
2
(w
2
v) = 0 .
Per dimostrare che w appartiene a V
`e suciente vericare la sua ortogonalit`a ai
vettori di una base di V .
Le dimensioni dei sottospazi V e V
sono legate da una semplice relazione.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.5. Proiezione ortogonale 31
9.4.10. Teorema. Sia V un sottospazio di R
n
; allora
dimV + dimV
= n.
Omettiamo la dimostrazione del Teorema enunciato; in precedenza labbiamo veri-
cato quando n = 2 per i sottospazi di dimensione 1 e quando n = 3 per i sottospazi
di dimensione 1 e 2 .
Concludiamo questa Sezione denendo una tipologia di sottoinsiemi di R
n
di
notevole interesse.
9.4.11. Denizione. insieme convesso Un insieme A R
n
si dice convesso se esso contiene ogni
segmento i cui estremi gli appartengano. In formule:
x, y A, [x, y] A.
Figura 9.4.6
Due insiemi non convessi in R
2
.
Se si rivede la Def. 2.1.1, si riconosce che gli insiemi convessi in R sono gli intervalli
e soltanto essi. Pi` u interessante la nozione di insieme convesso in R
2
. Sono convessi
i rettangoli, i rombi, i poligoni regolari, i cerchi ecc.; la Fig. 9.4.6 mostra due insiemi
non convessi. Il complementare di un insieme convesso `e, in generale, non convesso;
fanno eccezione i semipiani: sia che essi contengano la retta che ne costituisce lorigine,
sia che non la contengano, i rispettivi complementari sono ancora insiemi convessi.
Se si rivede lOss. 5.7.3, si riconosce che la funzione f : I R, dove I `e un
intervallo di R, `e convessa se, e solo se, `e convesso linsieme dei punti del piano che
stanno sopra il suo graco (qualche Autore usa il termine epigraco):
_
(x, y) R
2
x I , y f(x)
_
.
9.5. Proiezione ortogonale
Siano dati in R
n
la retta r per lorigine di equazione parametrica x = t v e un
punto x
0
non appartenente ad essa; la proiezione ortogonale di x
0
su r `e il punto
x
r per cui x
0
x
`e ortogonale a v : (x
0
x
)
v = 0 , cio`e
(x
0
tv)
v = 0, dunque t =
x
0
v
|v|
2
.
Ne segue che la proiezione ortogonale di x
0
su r `e
x
=
x
0
v
|v|
2
v . (9.5.1)
G. C. Barozzi G. Dore E. Obrecht
32 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Figura 9.5.1
Proiezione ortogonale di un punto su una
retta passante per lorigine.
v
x
0
x
x
*
e
1
e
2
La proiezione ortogonale x
`e lapprossimazione ottima di x
0
mediante elementi
della retta r , cio`e
x r , |x
0
x
| |x
0
x| .
Infatti il vettore x
x, in quanto dierenza tra due vettori di r , `e proporzionale
a v , mentre x
0
x
`e ortogonale a v per denizione. Ne segue, in virt` u del Teorema
di Pitagora 9.3.5,
|x
0
x|
2
= |(x
0
x
) + (x
x)|
2
= |x
0
x
|
2
+|x
x|
2
|x
0
x
|
2
.
Il risultato precedente si estende dalle rette per lorigine (sottospazi di dimensio-
ne 1 ) ai sottospazi di dimensione k con 1 k < n , cio`e ai k -piani passanti per
lorigine.
9.5.1. Teorema. Sia V
k
un k -piano passante per lorigine in R
n
, con
1 k < n ; per ogni x
0
R
n
esiste uno e un solo x
V
k
tale che x
0
x
sia
ortogonale a V
k
.
Il vettore x
si chiama proiezione
ortogonale
proiezione ortogonale di x
0
su V
k
.
Lortogonalit`a di x
0
x
a V
k
signica che tale vettore `e ortogonale ad ogni
vettore di V
k
, il che equivale a dire che esso `e ortogonale a ciascuno dei vettori
v
1
, v
2
, . . . , v
k
di una sua base: (x
0
x
)
v
i
= 0 , cio`e
x
v
i
= x
0
v
i
, per i = 1, 2, . . . , k . (9.5.2)
Poiche x
V
k
si ha
x
= t
1
v
1
+t
2
v
2
+. . . +t
k
v
k
,
quindi ciascuna delle (9.5.2) `e unequazione lineare nelle incognite t
1
, t
2
, . . . , t
k
che
sono le componenti del vettore x
rispetto alla base. Per determinare tali incognite,
bisogna dunque risolvere un sistema lineare di k equazioni in altrettante incognite;
si pu`o dimostrare che la matrice dei coecienti ha determinante non nullo e dunque
il sistema stesso ammette una e una sola soluzione.
Tuttavia se la base `e ortogonale, la soluzione del sistema in esame `e quasi imme-
diata; in tal caso (v. (9.3.6)) sappiamo che
t
i
=
x
v
i
|v
i
|
2
. (9.5.3)
Poiche la (9.5.2) assicura che x
v
i
= x
0
v
i
, si ha
x
=
k
i=1
x
0
v
i
|v
i
|
2
v
i
. (9.5.4)
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.6. Forme quadratiche 33
Se y V
k
, per lortogonalit`a tra i vettori x
0
x
e x
y , il Teorema di
Pitagora 9.3.19 implica che
|x
0
y|
2
= |(x
0
x
) + (x
y )|
2
= |x
0
x
|
2
+|x
y |
2
|x
0
x
|
2
,
quindi
y V
k
, |x
0
x
| |x
0
y| , (9.5.5)
cio`e x
`e lapprossimazione ottima di x
0
mediante elementi di V
k
. Lortogonalit`a
tra x
0
x
e x
implica poi che
|x
0
|
2
= |x
0
x
|
2
+|x
|
2
,
da cui
|x
|
2
|x
0
|
2
. (9.5.6)
Ma la (9.5.4) mostra che x
`e somma di vettori a due a due ortogonali, dunque il
quadrato della sua norma si calcola mediante il Teorema di Pitagora (v. (9.3.5)):
|x
|
2
=
k
i=1
t
2
i
|v
i
|
2
=
k
i=1
(x
0
v
i
)
2
|v
i
|
2
,
dove abbiamo sfruttato lespressione per t
i
fornita dalla (9.5.4). In denitiva
k
i=1
(x
0
v
i
)
2
|v
i
|
2
|x
0
|
2
. (9.5.7)
Abbiamo ottenuto un caso particolare della cosiddetta disuguaglianza di Bessel, dal
nome dellastronomo tedesco Friedrich Wilhelm Bessel (1784-1846).
9.5.2. Esempio Consideriamo i vettori v
1
= (1, 1, 1, 1) e v
2
= (1, 1, 1, 1)
in R
4
; essi sono tra loro ortogonali e generano il sottospazio
V
2
= t
1
v
1
+t
2
v
2
[ t
1
, t
2
R .
I vettori di V
2
si scrivono dunque (t
1
+ t
2
, t
1
t
2
, t
1
+ t
2
, t
1
t
2
) ; pertanto essi
sono caratterizzati dal fatto che la prima coordinata `e uguale alla terza e la seconda
`e uguale alla quarta
V
2
=
_
x = (x
1
, x
2
, x
3
, x
4
) R
4
x
1
= x
3
, x
2
= x
4
_
.
Consideriamo x
0
= (1, 2, 3, 4) / V
2
; per determinare la sua proiezione ortogonale
su V
2
dobbiamo calcolare
|v
1
|
2
= |v
2
|
2
= 4 , x
0
v
1
= 10 , x
0
v
2
= 2 .
La (9.5.4) fornisce dunque
x
=
5
2
v
1
1
2
v
2
= (2, 3, 2, 3) .
Suggeriamo allo studente di vericare la disuguaglianza di Bessel (9.5.6).
9.6. Forme quadratiche
Sappiamo dal Teor. 9.2.17 che una trasformazione lineare (non nulla) da R
n
a R `e un
polinomio omogeneo di primo grado. Ricordiamo che un polinomio si dice omogeneo
quando tutti i suoi termini hanno lo stesso grado. Risulta di notevole interesse sia
per la Geometria sia per lAnalisi studiare i polinomi omogenei di secondo grado.
G. C. Barozzi G. Dore E. Obrecht
34 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
9.6.1. Denizione. forma quadratica Chiamiamo forma quadratica in R
n
una funzione
q : R
n
R, q(x) =
n
i,j=1
a
ij
x
i
x
j
,
dove a
ij
R.
Evidentemente, se q non `e il polinomio nullo, esso `e omogeneo di secondo grado.
Osserviamo che, senza limitare la generalit`a, possiamo supporre a
ij
= a
ji
. Infatti,
poiche x
i
x
j
= x
j
x
i
, possiamo scrivere
a
ij
x
i
x
j
+a
ji
x
j
x
i
=
1
2
(a
ij
+a
ji
)x
i
x
j
+
1
2
(a
ij
+a
ji
)x
j
x
i
;
ponendo b
ij
= 1/2(a
ij
+a
ji
) , otteniamo
b
ij
= b
ji
,
n
i,j=1
a
ij
x
i
x
j
=
n
i,j=1
b
ij
x
i
x
j
.
Nel seguito, supponiamo dunque a
ij
= a
ji
.
Poiche i numeri a
ij
sono n
2
, `e naturale organizzarli in una matrice quadrata di
ordine n
A =
_
_
_
_
_
a
11
a
12
. . . a
1n
a
21
a
22
. . . a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
n1
a
n2
. . . a
nn
_
_
_
_
_
.
Per quanto detto sopra, la matrice A `e simmetrica: matrice
simmetrica,
matrice trasposta
A =
t
A; con
t
A indichiamo
la matrice trasposta di A, cio`e quella ottenuta da essa scambiando le righe con le
colonne.
Il prodotto della matrice A per il vettore x R
n
fornisce ancora un vettore
di R
n
; possiamo quindi farne il prodotto scalare ancora con x,
Ax
x =
n
i=1
_
n
j=1
a
ij
x
j
_
x
i
= q(x) .
Pertanto a ogni forma quadratica `e associata in maniera univoca una matrice qua-
drata e simmetrica di ordine n ; viceversa, a ogni matrice quadrata e simmetrica di
ordine n `e associata una forma quadratica in R
n
.
9.6.2. Esempio Consideriamo la matrice simmetrica
B =
_
_
1 2 1
2 1 3
1 3 2
_
_
;
la forma quadratica a essa associata `e
q : R
3
R, q(x, y, z) = x
2
y
2
+ 2z
2
+ 4xy + 2xz + 6yz .
Il risultato seguente `e di dimostrazione immediata.
9.6.3. Teorema. Sia q una forma quadratica in R
n
. Allora:
(1) q(0) = 0 .
(2) Sia v
_
R
n
_
; allora, t R
, q(tv) = t
2
q(v) , quindi una forma
quadratica ha segno costante su ciascuna retta passante per lorigine.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.6. Forme quadratiche 35
Lutilit`a delle forme quadratiche deriva, in larga misura, dalla propriet`a di invarian-
za del segno su ogni retta passante per lorigine. Ai ni delle applicazioni al calcolo
dierenziale per funzioni di pi` u variabili `e importante classicare le forme quadratiche
in base ai segni dei valori che esse assumono.
9.6.4. Denizione. forma quadratica
denita,
semidenita, non
denita
Sia q(x) = Ax
x una forma quadratica; diciamo che essa
(e la matrice A associata) `e
(1) denita positiva se, x
_
R
n
_
, q(x) > 0 ;
(2) denita negativa se, x
_
R
n
_
, q(x) < 0 ;
(3) non denita (oppure indenita) se assume valori sia positivi che negativi;
(4) semidenita positiva se, x R
n
, q(x) 0 ;
(5) semidenita negativa se, x R
n
, q(x) 0 .
9.6.5. Osservazione Poiche q(0) = 0 , la classicazione di q dipende dallimma-
gine della sua restrizione a
_
R
n
_
.
9.6.6. Osservazione La forma quadratica identicamente nulla `e sia semidenita
positiva sia semidenita negativa.
9.6.7. Osservazione Se la matrice A `e denita (positiva o negativa), essa `e cer-
tamente invertibile. In caso contrario esisterebbe c ,= 0 tale che Ac = 0 . Ma allora
sarebbe Ac
c = 0 , contro lipotesi.
9.6.8. Esempio Consideriamo le tre matrici
A
1
=
_
1 0
0 1
_
, A
2
=
_
1 0
0 0
_
, A
3
=
_
1 0
0 1
_
,
a cui sono associate le forme quadratiche in R
2
(v. Fig. 9.6.1)
q
1
(x, y) = x
2
+y
2
, q
2
(x, y) = x
2
, q
3
(x, y) = x
2
y
2
.
`
E immediato riconoscere che la prima `e denita positiva, la seconda semidenita
positiva (ma non `e denita positiva, perche q
2
(e
2
) = 0 ), la terza non denita (si ha
q
3
(e
1
) = 1 , q
3
(e
2
) = 1) .
x
x
x
y
y
y
Figura 9.6.1
Da sinistra a destra: graci dei polinomi q1 , q2 , q3 dellEs. 9.6.8, cio`e le supercie di
equazione z = q1(x, y) , z = q2(x, y) , z = q3(x, y) , rispettivamente.
G. C. Barozzi G. Dore E. Obrecht
36 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
9.6.9. Esempio Si considerino le forme quadratiche in R
3
:
q
4
(x, y, z) = x
2
+y
2
+z
2
,
q
5
(x, y, z) = x
2
yz ,
q
6
(x, y, z) = x
2
z
2
,
q
7
(x, y, z) = x
2
+y
2
+z
2
+xy .
Lasciamo al lettore la scrittura delle corrispondenti matrici; si verichi poi che
q
4
`e denita positiva, q
5
`e non denita, q
6
`e semidenita negativa, q
7
`e de-
nita positiva. Questultimo fatto non `e immediato; partendo dalla disuguaglianza
(x +y)
2
= x
2
+y
2
+ 2xy 0 , otteniamo
xy
1
2
(x
2
+y
2
) .
Allora, (x, y, z)
_
R
3
_
,
q
7
(x, y, z) = x
2
+y
2
+z
2
+xy x
2
+y
2
+z
2
1
2
(x
2
+y
2
) =
=
1
2
(x
2
+y
2
) +z
2
> 0 .
Vogliamo poter classicare una forma quadratica in base allesame della matrice a
essa associata. La situazione `e semplice se n = 2 .
9.6.10. Teorema. Siano q una forma quadratica non nulla in R
2
:
q(x, y) = A
_
x
y
_
(x, y) =
_
a
11
a
12
a
21
a
22
__
x
y
_
(x, y) = a
11
x
2
+ 2a
12
xy +a
22
y
2
.
Allora q `e
(1) denita positiva se, e solo se, a
11
> 0 e det A > 0 ;
(2) denita negativa se, e solo se, a
11
< 0 e det A > 0 ;
(3) non denita se, e solo se, det A < 0 ;
(4) semidenita positiva se det A = 0 e almeno uno tra a
11
e a
22
`e maggiore
di 0 ;
(5) semidenita negativa se det A = 0 e almeno uno tra a
11
e a
22
`e minore
di 0 .
Dimostrazione. Se y ,= 0 , possiamo scrivere
q(x, y) = y
2
(a
11
t
2
+ 2a
12
t +a
22
) ,
avendo posto t = x/y . Il segno del polinomio entro parentesi tonde `e governato dal
suo discriminante (v. Fig. 2.3.1 e la discussione che la precede)
4
= (a
12
)
2
a
11
a
22
= det A.
Il polinomio assume valori sia positivi sia negativi se, e solo se, /4 > 0 , cio`e
det A < 0 . In questo caso la forma quadratica `e non denita e (3) `e provato.
Se /4 < 0 , il polinomio ha segno costante: positivo, se a
11
> 0 e negativo se
a
11
< 0 . Anche il viceversa di questa aermazione `e ovviamente vero.
`
E poi ovvio
che q(x, 0) = a
11
x
2
ha lo stesso segno di a
11
. Questo prova (1) e (2) .
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.6. Forme quadratiche 37
Inne sia det A = a
11
a
22
a
2
12
= 0 . Se a
11
,= 0 , risulta
q(x, y) = a
11
_
x
2
+ 2
a
12
a
11
xy +
a
2
12
a
2
11
y
2
_
= a
11
_
x +
a
12
a
11
y
_
2
;
quindi q(x, y) 0 , (x, y) R
2
, se a
11
> 0 , mentre q(x, y) 0 , (x, y) R
2
, se
a
11
< 0 . Analogamente si prova che q(x, y) 0 , (x, y) R
2
, se a
22
> 0 , mentre
q(x, y) 0 , (x, y) R
2
, se a
22
< 0 . Questo prova (4) e (5) .
Osserviamo che questo teorema consente sempre di classicare una forma quadra-
tica non nulla q .
Infatti, se det A > 0 , allora a
11
a
22
det A > 0 , quindi deve essere a
11
,= 0 e
siamo nel caso (1) o (2); se det A < 0 , allora siamo nel caso (3). Inne, quando
det A = 0 si ha (a
12
)
2
= a
11
a
22
, perci`o se a
11
e a
22
fossero entrambi uguali a 0 ,
sarebbe nullo anche a
12
, e la forma quadratica sarebbe nulla. Quindi almeno uno
tra a
11
e a
22
`e diverso da 0 e siamo nel caso (4) o (5).
La classicazione di una forma quadratica in n variabili, con n > 2 , non `e al-
trettanto semplice; se si rivede lEs. 9.6.9, si riconosce che `e immediato classicare
le forme q
4
e q
5
, in quanto in esse le variabili compaiono soltanto al quadrato, ma
abbiamo visto che non `e altrettanto semplice classicare la forma q
7
.
Una forma quadratica p , in cui le variabili compaiono soltanto al quadrato, ha
matrice associata B tale che b
ij
= 0 , se i ,= j ; pertanto la matrice B `e matrice diagonale diagonale
B =
_
_
_
_
_
b
11
0 . . . 0
0 b
22
. . . 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 . . . b
nn
_
_
_
_
_
e la forma quadratica `e
p(x) =
n
i=1
b
ii
x
2
i
.
In questo caso la classicazione della forma quadratica `e particolarmente semplice;
infatti, poiche p(e
i
) = b
ii
, si riconosce che:
(1) p `e denita positiva se (e solo se) b
ii
> 0 , per i = 1, 2, . . . , n ;
(2) p `e denita negativa se (e solo se) b
ii
< 0 , per i = 1, 2, . . . , n ;
(3) p `e non denita se (e solo se) esistono due indici i e j tali che b
ii
< 0 , b
jj
> 0 ;
(4) p `e semidenita positiva se (e solo se) b
ii
0 , per i = 1, 2, . . . , n ;
(5) p `e semidenita negativa se (e solo se) b
ii
0 , per i = 1, 2, . . . , n .
Ci si chiede se sia possibile riscrivere una forma quadratica generica q , mediante
un opportuno cambiamento di variabili, in modo che, le nuove variabili compaiano
soltanto al quadrato.
Sia v
1
, v
2
, . . . , v
n
una base di R
n
(v. Def. 9.1.20); se x R
n
, si pu`o scrivere
x =
n
i=1
u
i
v
i
,
dove u
1
, u
2
, . . . , u
n
sono le componenti di x rispetto a tale base. Ne segue
q(x) = Ax
x = A
_
n
i=1
u
i
v
i
_
_
n
j=1
u
j
v
j
_
=
_
n
i=1
u
i
Av
i
_
_
n
j=1
u
j
v
j
_
=
=
n
i,j=1
(Av
i
v
j
) u
i
u
j
.
(9.6.1)
G. C. Barozzi G. Dore E. Obrecht
38 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Abbiamo dunque ottenuto una forma quadratica nelle variabili u
i
, avente come
coecienti i numeri Av
i
v
j
.
`
E possibile scegliere la base v
1
, v
2
, . . . , v
n
in modo che tali coecienti siano
nulli per i ,= j ? La risposta a tale domanda `e aermativa, ma richiede notevoli
premesse su argomenti di Algebra lineare.
9.6.11. Denizione. autovettore,
autovalore
Sia A /
n,n
(R) ; diciamo che il vettore v
_
R
n
_
`e un
autovettore di A se esiste R, tale che
Av = v . (9.6.2)
In tal caso si dice che `e lautovalore corrispondenti a v .
In termini geometrici: gli autovettori individuano le direzioni che restano invarianti
ad opera della trasformazione lineare x Ax .
Se la (9.6.2) `e soddisfatta, v `e soluzione non nulla del sistema lineare omogeneo
(A I
n
) v = 0
dove I
n
`e la matrice identit` a matrice identit`a di ordine n :
I
n
=
_
_
_
_
_
1 0 . . . 0
0 1 . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 . . . 1
_
_
_
_
_
.
Ne segue equazione
caratteristica
che `e un autovalore se, e solo se, `e soluzione dellequazione algebrica
det(A I
n
) = 0,
detta equazione caratteristica di A. Il polinomio al primo membro, detto polinomio
caratteristico
polinomio
caratteristico di A, `e
det(A I
n
) = det
_
_
_
_
_
a
11
a
12
. . . a
1n
a
21
a
22
. . . a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
n1
a
n2
. . . a
nn
_
_
_
_
_
=
= (1)
n
(
n
+c
1
n1
+. . . +c
n
) ,
dove i coecienti c
i
sono reali. Lequazione caratteristica `e dunque unequazione
algebrica di grado n e, per quanto sappiamo dalla Sezione 3.5, essa ha al pi` u n
soluzioni.
Se molteplicit`a
algebrica di un
autovalore
`e un autovalore, dunque una soluzione dellequazione caratteristica, esso ha
una molteplicit`a (v. Def. 3.5.6) che chiameremo molteplicit`a algebrica dellautovalore.
9.6.12. Osservazione
`
E evidente che, se la matrice `e diagonale,
A =
_
_
_
_
_
a
11
0 . . . 0
0 a
22
. . . 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 . . . a
nn
_
_
_
_
_
,
allora lequazione caratteristica `e
n
i=1
(a
ii
) = 0 ; pertanto gli autovalori sono gli
elementi della diagonale.
Linsieme degli autovettori che hanno come autovalore corrispondente, unita-
mente al vettore nullo, `e un sottospazio vettoriale di R
n
, perche costituisce il nucleo
della trasformazione lineare che ha A I
n
come matrice associata.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.6. Forme quadratiche 39
9.6.13. Denizione. autospazio Siano A /
n,n
(R) e un autovalore di A. Chiamiamo
autospazio relativo allautovalore il sottospazio vettoriale
x R
n
[ (A I
n
)x = 0 .
9.6.14. Esempio Consideriamo la matrice reale non simmetrica
B =
_
0 1
1 0
_
,
la cui equazione caratteristica `e
det(B I
2
) = det
_
1
1
_
=
2
+ 1 = 0 ,
che non ha soluzioni in R. Pertanto B non possiede autovalori.
Le matrici simmetriche godono di alcune notevoli propriet`a per quanto riguarda
autovalori e autovettori.
9.6.15. Teorema. autovalori e
autovettori delle
matrici
simmetriche
Sia A /
n,n
(R) una matrice simmetrica. Allora:
(1) A ha r autovalori
1
,
2
, . . . ,
r
tra loro distinti, di molteplicit`a rispetti-
vamente m
1
, m
2
, . . . , m
r
, con m
1
+m
2
+ +m
r
= n ;
(2) per ogni i = 1, 2, . . . , r , il sistema lineare omogeneo
(A
i
I
n
) x = 0
ha m
i
soluzioni linearmente indipendenti, dunque lo s.v. delle soluzioni ha
dimensione m
i
;
(3) autovettori relativi ad autovalori diversi sono ortogonali;
(4) esiste una base ortonormale di R
n
costituita da autovettori di A.
La propriet`a espressa dal punto (2) aerma che lautospazio relativo allautovalo-
re
i
`e un sottospazio di R
n
di dimensione m
i
; la propriet`a (3) stabilisce che gli
autospazi relativi ad autovalori distinti sono ortogonali, mentre dalla (4) segue che,
se in ogni autospazio si sceglie una base ortonormale, lunione di tali basi costituisce
una base ortonormale di R
n
.
Se si lascia cadere lipotesi che la matrice A sia simmetrica, le quattro aermazioni
in cui si articola la tesi del teorema enunciato non valgono pi` u. Abbiamo appena
visto lEs. 9.6.14 in cui viene mostrata una semplice matrice non simmetrica priva di
autovalori. Si considerino ancora gli esempi seguenti.
9.6.16. Esempio Consideriamo la matrice non simmetrica
B =
_
_
1 0 0
1 2 0
1 0 3
_
_
,
la cui equazione caratteristica `e
(1 )(2 )(3 ) = 0.
Agli autovalori
1
= 1 ,
2
= 2 ,
3
= 3 , corrispondono i sistemi omogenei
(B I
3
) x = 0, (B 2I
3
) x = 0, (B 3I
3
) x = 0,
G. C. Barozzi G. Dore E. Obrecht
40 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
cio`e
_
_
0 = 0
x
1
+x
2
= 0
x
1
+ 2x
3
= 0
,
_
_
x
1
= 0
x
1
= 0
x
1
+x
3
= 0
,
_
_
2x
1
= 0
x
1
x
2
= 0
x
1
= 0
;
che hanno, fra le altre, le soluzioni non nulle v
1
= (2, 2, 1) , v
2
= (0, 1, 0) e
v
3
= (0, 0, 1) nellordine. Come si vede, v
1
non `e ortogonale ne a v
2
, ne a v
3
.
9.6.17. Esempio Consideriamo la matrice non simmetrica
B =
_
_
1 0 0
1 2 0
0 1 2
_
_
,
la cui equazione caratteristica `e
(1 )(2 )
2
= 0 ;
essa ha la soluzione semplice
1
= 1 e la soluzione doppia
2
= 2 . Agli autovalori
1
e
2
corrispondono i sistemi omogenei (B I
3
) x = 0 , (B 2I
3
) x = 0 , cio`e
_
_
0 = 0
x
1
+x
2
= 0
x
2
+x
3
= 0
,
_
_
x
1
= 0
x
1
= 0
x
2
= 0
.
Il primo sistema ha le soluzioni (, , ) , mentre il secondo ha le soluzioni i (0, 0, ) ,
con R. Dunque lautospazio corrispondente allautovalore 2 ha dimensione 1 ,
anche se tale autovalore ha molteplicit`a algebrica 2 . In tal caso si dice che lautovalore
ha molteplicit`a
geometrica di un
autovalore
molteplicit`a geometrica 1 . Non si pu`o dunque trovare una base di autovettori.
Riprendiamo in esame il ragionamento che ci ha condotto alla (9.6.1), supponendo
nuovamente che A sia una matrice simmetrica. Se scegliamo come base di R
n
la base
ortonormale costituita da autovettori della matrice A, la cui esistenza `e aermata dal
Teor. 9.6.15, otteniamo, per i coecienti dalla forma quadratica in esame, lespressione
Av
i
v
j
=
i
v
i
v
j
=
_
i
, se i = j ,
0 , altrimenti.
La (9.6.1) si riscrive dunque
q(x) = Ax
x =
n
i=1
i
u
2
i
;
pertanto, in questa base, la forma quadratica q presenta solo termini in cui com-
paiono i quadrati delle variabili. I coecienti di questi termini sono gli autovalori
della matrice A: questo equivale ad aermare che la matrice associata alla forma
quadratica risulta diagonale in una base formata da autovettori. Per quanto abbia-
mo osservato sulle forme quadratiche di questo tipo, possiamo formulare il seguente
risultato.
9.6.18. Teorema. Siano A /
n,n
(R) una matrice simmetrica e q la forma
quadratica a essa associata. Detti
1
, . . . ,
r
gli autovalori distinti di A, si ha:
(1) q `e denita positiva se, e solo se,
i
> 0 , per i = 1, 2, . . . , r ;
(2) q `e denita negativa se, e solo se,
i
< 0 , per i = 1, 2, . . . , r ;
(3) q `e non denita se, e solo se, possiede almeno un autovalore positivo e uno
negativo;
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.6. Forme quadratiche 41
(4) q `e semidenita positiva se, e solo se,
i
0 , per i = 1, 2, . . . , r ;
(5) q `e semidenita negativa se, e solo se,
i
0 , per i = 1, 2, . . . , r .
9.6.19. Esempio Consideriamo ancora la forma quadratica q
7
dellEs. 9.6.9, la cui
matrice associata `e
B =
_
_
1 1/2 0
1/2 1 0
0 0 1
_
_
;
il polinomio caratteristico `e
det(B I
3
) = det
_
_
1 1/2 0
1/2 1 0
0 0 1
_
_
= (1 )
_
(1 )
2
1
4
_
,
come si riconosce sviluppando il determinante secondo gli elementi della terza riga.
Dunque B ha gli autovalori
1
= 3/2 ,
2
= 1 ,
3
= 1/2 che sono positivi e
pertanto la forma quadratica q
7
`e denita positiva, come gi`a sappiamo.
Poiche la ricerca degli autovalori di una matrice pu`o essere dicoltosa, soprattutto
se n `e grande, risulta utile il seguente risultato, alla cui formulazione dobbiamo
premettere alcune notazioni.
Sia A una matrice quadrata di ordine n ,
A =
_
_
_
_
_
a
11
a
12
. . . a
1n
a
21
a
22
. . . a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
n1
a
n2
. . . a
nn
_
_
_
_
_
.
Consideriamone il minore formato con le prime k righe e le prime k colonne; poniamo
cio`e, per k = 1, 2, . . . , n ,
k
= det
_
_
_
_
_
a
11
a
12
. . . a
1k
a
21
a
22
. . . a
2k
.
.
.
.
.
.
.
.
.
.
.
.
a
k1
a
k2
. . . a
kk
_
_
_
_
_
.
Evidentemente
n
= det A.
9.6.20. Teorema (criterio di Sylvester
4
). criterio di
Sylvester
Siano q una forma quadratica in R
n
e A la matrice a essa associata. Allora:
(1) q `e denita positiva se, e solo se,
k
> 0 , k = 1, 2, . . . , n ;
(2) q `e denita negativa se, e solo se, (1)
k
k
> 0 , k = 1, 2, . . . , n ;
(3) se esiste h pari, tale che
h
< 0 , allora q `e non denita.
La condizione (2) signica che sono positivi i determinanti
k
con k pari, negativi
quelli con k dispari.
La relazione tra il segno dei minori
k
e il fatto che la forma quadratica q asso-
ciata alla matrice A sia o meno denita risulta immediata se A `e diagonale. Infatti,
4
Dal nome del matematico inglese James Joseph Sylvester (1814-1897).
G. C. Barozzi G. Dore E. Obrecht
42 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
in questo caso
k
= det
_
_
_
_
_
a
11
0 . . . 0
0 a
22
. . . 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 . . . a
nn
_
_
_
_
_
=
k
i=1
a
ii
e gli a
ii
coincidono con gli autovalori di A (v. Oss. 9.6.12). Pertanto i mino-
ri
k
sono tutti positivi se, e solo se, tutti gli autovalori di A sono positivi;
per il Teor. 9.6.18 ci`o equivale al fatto che q sia denita positiva. Inoltre, poiche
(1)
k
k
=
k
i=1
(a
ii
) , si ha (1)
k
k
> 0 , per k = 1, 2, . . . , n , se, e solo se, tutti
gli autovalori di A sono negativi, e ci`o equivale al fatto che q sia denita negativa.
Inne, se esiste h pari tale che
h
< 0 , allora il prodotto di un numero pari di
autovalori `e negativo, quindi almeno uno di essi `e positivo e uno `e negativo, perci`o q
`e non denita.
9.6.21. Osservazione Alcuni Autori chiamano sottomatrice principale di Nord-
Ovest della matrice A la sottomatrice formata dagli elementi delle prime k righe e
delle prime k colonne di A: `e precisamente quella che ha come determinante
k
.
Laggettivo principale signica che abbiamo prelevato da A gli elementi appartenenti
a certe righe (nel nostro caso le prime k righe) e alle colonne aventi gli stessi indici.
9.6.22. Esempio Consideriamo ancora la forma quadratica q
7
dellEs. 9.6.9, la cui
matrice associata `e
B =
_
_
1 1/2 0
1/2 1 0
0 0 1
_
_
.
Si trova
1
= 1,
2
= det
_
1 1/2
1/2 1
_
=
3
4
,
3
= det B =
3
4
;
dunque q
7
`e denita positiva, come gi`a sappiamo.
9.6.23. Esempio Consideriamo ancora la forma quadratica q dellEs. 9.6.2, la cui
matrice associata `e
B =
_
_
1 2 1
2 1 3
1 3 2
_
_
.
Si trova
1
= 1 ,
2
= det
_
1 2
2 1
_
= 5 ;
dunque q `e non denita.
9.6.24. Esempio Consideriamo la forma quadratica in R
4
q(x) = x
2
1
+x
2
2
+x
2
3
+x
2
4
+x
1
x
2
+x
1
x
3
+x
1
x
4
+x
2
x
3
+x
2
x
4
+x
3
x
4
,
cui `e associata la matrice
B =
_
_
_
_
1 1/2 1/2 1/2
1/2 1 1/2 1/2
1/2 1/2 1 1/2
1/2 1/2 1/2 1
_
_
_
_
.
Si trova, con qualche calcolo,
1
= 1 ,
2
=
3
4
,
3
=
1
2
,
4
=
5
16
;
dunque q `e denita positiva.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.7. Coniche 43
9.7. Coniche
Una famiglia notevole di curve del piano, studiate n dallantichit`a, `e costituita dalle
coniche coniche, cos` chiamate perche possono essere ottenute intersecando un doppio cono
circolare con un piano. Daremo le equazioni di tali curve prima in forma cartesiana,
cio`e mediante equazioni in cui intervengono soltanto le coordinate dei punti ad esse
appartenenti, poi in forma parametrica.
9.7.1. Denizione. ellisse Siano f
1
, f
2
R
2
e a R
+
tale che 2a > d(f
1
, f
2
) ; si
chiama ellisse di fuochi f
1
e f
2
linsieme
_
(x, y) R
2
d
_
(x, y), f
1
_
+d
_
(x, y), f
2
_
= 2a
_
. (9.7.1)
1
1
c
a
b
x, y
Figura 9.7.1
Lellisse `e linsieme dei punti del piano per cui
`e costante la somma delle distanze dai fuochi.
In gura lellisse con a = 2 , c = 1.2 .
Se f
1
,= f
2
, per ottenere lequazione dellellisse in forma semplice, scegliamo
f
1
= (c, 0) , f
2
= (c, 0) , con c ]0, a[ . Allora, con alcuni calcoli, si deduce dalla
(9.7.1) che lellisse `e linsieme dei punti (x, y) per cui
x
2
a
2
+
y
2
b
2
= 1 , con b =
_
a
2
c
2
. (9.7.2)
Il punto medio del segmento [f
1
, f
2
] viene detto centro dellellisse, in quanto `e
centro di simmetria per lellisse stessa. Tra le rette passanti per lorigine rivestono
particolare importanza la retta passante per i fuochi e lasse del segmento [f
1
, f
2
] ,
perpendicolare alla retta precedente; esse sono assi di simmetria dellellisse. I punti
dintersezione dellellisse con tali rette vengono vengono detti vertici dellellisse; le
loro coordinate sono (a, 0) e (0, b) .
I segmenti congiungenti un vertice di unellisse con il centro si chiamano semiassi;
le loro lunghezze sono i numeri reali a e b .
Se f
1
= f
2
, si ha c = 0 , a = b , perci`o i fuochi coincidono col centro e lellisse `e
una circonferenza.
Lellisse pu`o essere rappresentata in forma parametrica dalle equazioni
_
x = a cos t ,
y = b sint , t [0, 2] .
(9.7.3)
Se a < b , tanto lequazione cartesiana quanto le equazioni parametriche descrivono
ancora unellisse, ma i fuochi appartengono allasse y , e precisamente sono i punti
(0, c) con c =
b
2
a
2
.
G. C. Barozzi G. Dore E. Obrecht
44 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Figura 9.7.2
Lellisse in forma parametrica: i punti dellel-
lisse si ottengono come intersezione tra la ret-
ta parallela allasse y passante per il punto
(a cos t, a sin t) e la retta parallela allasse x
passante per il punto (b cos t, b sin t) .
a
b
t
1
1
1
1
Figura 9.7.3
A sinistra lellisse con a = 2 , b = 1.5 ; a destra lellisse con a = 1.8 , b = 2.1 .
9.7.2. Denizione. iperbole Siano f
1
, f
2
R
2
due punti distinti, a R
+
tale che
2a < d(f
1
, f
2
) ; si chiama iperbole di fuochi f
1
e f
2
linsieme
_
(x, y) R
2
d
_
(x, y), f
1
_
d
_
(x, y), f
2
_
= 2a
_
. (9.7.4)
Liperbole consta di due rami, individuati rispettivamente dalle condizioni
d
_
(x, y), f
1
_
d
_
(x, y), f
2
_
= 2a , d
_
(x, y), f
2
_
d
_
(x, y), f
1
_
= 2a ;
ciascuno di tali rami `e contenuto in uno dei due semipiani in cui lasse del segmento
[f
1
, f
2
] divide il piano. I due rami sono tra loro simmetrici rispetto a tale asse;
esso viene chiamato asse non trasverso, in quanto non interseca liperbole, mentre
la retta passante per i fuochi `e detta asse trasverso. Anchessa `e asse di simmetria
delliperbole.
Per ottenere lequazione delliperbole nella forma pi` u semplice, scegliamo ancora
f
1
= (c, 0) , f
2
= (c, 0) , dove ora c > a . Con alcuni calcoli si dimostra allora che
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.7. Coniche 45
liperbole `e linsieme dei punti (x, y) per cui
x
2
a
2
y
2
b
2
= 1 , con b =
_
c
2
a
2
. (9.7.5)
1
1
c
a
b
x, y
Figura 9.7.4
Liperbole `e linsieme dei punti del piano per
cui `e costante la dierenza delle distanze dai
fuochi. In gura liperbole con a = 1.5 ,
c = 2.5 . In nero sono indicati gli asintoti.
Lintersezione delliperbole con lasse trasverso `e costituita dai punti (a, 0) , i
cosiddetti vertici delliperbole.
Liperbole pu`o essere rappresentata in forma parametrica dalle equazioni
_
x = a cosht ,
y = b sinht , t R.
(9.7.6)
Suggeriamo allo studente di rivedere le Fig. 2.5.1 e 2.5.2. Le rette di equazione
y = (b/a) x sono asintoti delliperbole. Se a = b liperbole si dice iperbole equilatera equilatera; in tal
caso gli asintoti sono tra loro perpendicolari.
Se i fuochi delliperbole vengono scelti sullasse y , dunque sono i punti (0, c) ,
(0, c) , si ottiene lequazione delliperbole nella forma
x
2
a
2
+
y
2
b
2
= 1 ;
in tal caso i due rami delliperbole sono tra loro simmetrici rispetto allasse x , che
costituisce lasse non trasverso.
9.7.3. Denizione. parabola Siano r una retta in R
2
e f R
2
un punto non
appartenente a essa; si chiama parabola di fuoco f e direttrice r linsieme
_
(x, y) R
2
d
_
(x, y), f
_
= d
_
(x, y), r
__
, (9.7.7)
dove la distanza di (x, y) da r `e la distanza tra (x, y) e la sua proiezione
ortogonale su r (v. (9.5.1)).
Discende dalla denizione che la retta condotta dal fuoco perpendicolarmente alla
direttrice `e lunico asse di simmetria della parabola. Lintersezione di tale asse con la
parabola `e lunico vertice della parabola stessa.
Per ottenere lequazione della parabola nella forma pi` u semplice, scegliamo come
direttrice la retta di equazione y = d e come fuoco f = (0, d) con d R
+
. Con
G. C. Barozzi G. Dore E. Obrecht
46 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
1
1
d
x, y
1
1
1
1
1
1
Figura 9.7.5
La parabola `e linsieme dei punti equidistanti dal fuoco e dalla direttrice. In gura (in alto
a sinistra) la parabola che ha direttrice y = d e fuoco (0, d) , con d = 0.5 ; a destra la
parabola analoga con d = 0.5 . In basso (a sinistra) la parabola che ha direttrice x = d
e fuoco (d, 0) , con d = 0.7 , a destra la parabola analoga con d = 0.7
alcuni calcoli si dimostra allora che lequazione della parabola si scrive
y =
1
4d
x
2
. (9.7.8)
In questo caso come equazioni parametriche possiamo prendere
_
x = t ,
y =
1
4d
t
2
, t R.
Gli stessi ragionamenti mostrano che, se la direttrice di una parabola `e la retta di
equazione x = d e il fuoco `e il punto (d, 0) , allora lequazione della parabola `e
x =
1
4d
y
2
.
`
E appena il caso di rilevare che, cambiando d in d , si scambiano la posizioni di
direttrice e fuoco e si ottengono (v. Fig. 9.7.5) le parabole di equazioni
y =
1
4d
x
2
, x =
1
4d
y
2
.
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.7. Coniche 47
Abbiamo visto, nella Sezione 2.3, che ogni polinomio di secondo grado in una
variabile pu`o essere considerato come il graco di una parabola con direttrice parallela
allasse delle ascisse e dunque asse di simmetria parallelo allasse delle ordinate.
Le equazioni delle coniche che abbiamo descritto sono state ottenute scegliendo
un sistema di coordinate strettamente collegato con le propriet`a di simmetria della
conica in esame. Semplici traslazioni consentono di scrivere le equazioni delle coniche
i cui assi sono paralleli (ma non necessariamente coincidenti) con gli assi coordinati.
Traslando lorigine nel punto (, ) , si hanno pertanto equazioni del tipo seguente
(x )
2
a
2
+
(y )
2
b
2
= 1
per lellisse,
(x )
2
a
2
(y )
2
b
2
= 1,
(x )
2
a
2
+
(y )
2
b
2
= 1
per liperbole,
y =
1
4d
(x )
2
, y =
1
4d
(x )
2
,
x =
1
4d
(y )
2
, x =
1
4d
(y )
2
per la parabola.
Le equazioni delle coniche n qui illustrate sono state ottenute uguagliando a zero
un polinomio di secondo grado in due variabili; rimandando allEs. 10.5.13 per una
denizione precisa di tale concetto, ci limitiamo a osservare che le coniche ottenute
ruotando quelle ora studiate, hanno ancora equazioni fornite dallannullamento di un
polinomio di secondo grado, in due variabili, di forma in generale pi` u complessa.
9.7.4. Esempio Consideriamo liperbole equilatera di equazione x
2
y
2
= a
2
e
determiniamo lequazione delliperbole che si ottiene ruotandola attorno allorigine di
un angolo di /4 radianti in senso antiorario.
Tale rotazione muta il punto (x, y) nel punto (x
, y
) dove
_
x
_
=
_
1/
2 1/
2
1/
2 1/
2
__
x
y
_
.
Al riguardo si tenga presente il Teor. 9.2.21, osservando che la rotazione in esame
muta i vettori della base canonica di R
2
rispettivamente nei vettori
_
1/
2, 1/
2
_
e
_
1/
2, 1/
2
_
. Si ha dunque, invertendo la formula precedente,
_
x
y
_
=
_
1/
2 1/
2
1/
2 1/
2
__
x
_
,
cio`e x =
_
1/
2
_
(x
+ y
) , y =
_
1/
2
_
(x
+ y
) . Sostituendo nellequazione
delliperbole si ottiene
1
2
(x
+y
)
2
1
2
(x
+y
)
2
= a
2
, cio`e x
=
a
2
2
.
Sorge spontanea la domanda se linsieme dei punti che annullano un polinomio di
secondo grado in due variabili sia sempre una conica; la risposta `e negativa, come
mostra il seguente semplice esempio.
9.7.5. Esempio Si consideri lequazione
x
2
+y
2
+ 1 = 0 .
Si tratta di unequazione polinomiale di secondo grado in due variabili, ma linsieme
dei punti che la soddisfano `e vuoto.
G. C. Barozzi G. Dore E. Obrecht
48 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Gli esempi seguenti mostrano coniche degeneri.
9.7.6. Esempio Consideriamo lequazione
x
2
+y
2
= 0 .
Si tratta ancora di unequazione polinomiale di secondo grado in due variabili, ma
linsieme dei punti che la soddisfano `e il singoletto (0, 0) .
9.7.7. Esempio Consideriamo lequazione
a
2
x
2
b
2
y
2
= 0 ,
con a e b non entrambi nulli, che possiamo scrivere nella forma
(ax by)(ax +by) = 0 ;
dunque linsieme dei punti che soddisfano lequazione data `e lunione di due rette, o
anche una sola retta se uno dei coecienti a oppure b `e nullo.
9.8. Quadriche
Le coniche sono le curve piane pi` u semplici dopo le rette; vogliamo ora esaminare
le supercie tridimensionali pi` u semplici dopo i piani: le quadriche quadriche. Le equazioni
cartesiane di queste supercie si ottengono uguagliando a 0 un polinomio di secondo
grado in tre variabili.
Esaminiamo i vari tipi di quadriche. Cominciamo ellissoide dallellissoide. Dati a, b, c R
+
,
lellissoide `e la supercie di R
3
descritta dallequazione
x
2
a
2
+
y
2
b
2
+
z
2
c
2
= 1 . (9.8.1)
Poiche ciascuno degli addendi a primo membro non pu`o superare 1 , lellissoide `e
contenuto nel parallelepipedo [a, a] [b, b] [c, c] .
I piani coordinati sono piani di simmetria, gli assi coordinati sono assi di simmetria
e lorigine delle coordinate `e centro di simmetria per lellissoide. Ad esempio, se
(x
0
, y
0
, z
0
) `e un punto che verica la (9.8.1), lo stesso vale per il punto (x
0
, y
0
, z
0
) .
I punti di intersezione degli assi con lellissoide vengono detti vertici dellellissoide;
essi sono (a, 0, 0) , (0, b, 0) , (0, 0, c) .
Intersecando lellissoide con piani paralleli ai piani coordinati, lintersezione, se
non `e vuota, `e unellisse, eventualmente ridotta a un punto. Ad esempio, scegliendo
il piano z = z
0
con [z
0
[ < c , la curva intersezione ha equazioni
_
_
_
x
2
a
2
+
y
2
b
2
= 1
z
2
0
c
2
,
z = z
0
;
chiamando
2
, con R
+
, il secondo membro della prima equazione, si ha
x
2
2
a
2
+
y
2
2
b
2
= 1 ,
cio`e si tratta di unellisse di semiassi a , b . Se a = b si ottiene una circonferenza;
in tal caso lellissoide (9.8.1) `e una supercie di rotazione, vale a dire pu`o essere
ottenuto ruotando attorno allasse z lellisse di equazioni
_
_
_
x
2
a
2
+
z
2
c
2
= 1 ,
y = 0 .
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.8. Quadriche 49
Figura 9.8.1
Quattro ellissoidi. I due ellissoidi in basso sono supercie di rotazione attorno allasse z .
Analoghe considerazioni se `e vericata una delle uguaglianze a = c oppure b = c .
Se poi risulta a = b = c , lellissoide `e la sfera di centro lorigine e raggio a .
Si osservi che se a = b , possiamo scrivere lequazione dellellissoide nella forma
r
2
a
2
+
z
2
c
2
= 1 ,
avendo posto
r =
_
x
2
+y
2
. (9.8.2)
Dunque r `e la distanza del punto (x, y, z) dallasse z .
Lellissoide `e rappresentato in forma parametrica dalle equazioni
_
_
x = a cos u sin v ,
y = b sin u sin v ,
z = c cos v , u [0, 2] , v [0, ] .
Consideriamo ora iperboloide a una
falda
liperboloide a una falda (detto anche iperboloide iperbolico).
Esso `e rappresentato dallequazione
x
2
a
2
+
y
2
b
2
z
2
c
2
= 1 , (9.8.3)
G. C. Barozzi G. Dore E. Obrecht
50 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
con a, b, c R
+
.
Analogamente al caso dellellissoide, i piani coordinati sono piani di simmetria, gli
assi coordinati sono assi di simmetria e lorigine delle coordinate `e centro di simmetria
per liperboloide a una falda.
Di natura ben diversa sono invece le intersezioni con i piani coordinati: linter-
sezione col piano y = 0 `e liperbole di equazione x
2
/a
2
z
2
/c
2
= 1 , lintersezione
col piano x = 0 `e liperbole di equazione y
2
/b
2
z
2
/c
2
= 1 . Le intersezioni pi` u
interessanti si hanno con piani paralleli al piano xy ; infatti, se z
0
R, lintersezione
col piano z = z
0
`e lellisse di equazioni
_
_
_
x
2
a
2
+
y
2
b
2
= 1 +
z
2
0
c
2
,
z = z
0
.
Se indichiamo con
2
il secondo membro della prima equazione, con > 0 , lellisse
ha equazione
x
2
2
a
2
+
y
2
2
b
2
= 1
e quindi i suoi semiassi misurano a e b . Pertanto questi semiassi hanno lunghezza
strettamente crescente al crescere di [z
0
[ ; ne consegue che lellisse per cui i semiassi
sono minimi si ottiene quando z
0
= 0 . Questo giustica il nome di linea di strizione
per lellisse di equazioni
_
_
_
x
2
a
2
+
y
2
b
2
= 1 ,
z = 0 .
Se a = b tutte le ellissi considerate sono circonferenze e dunque liperboloide `e una
supercie di rotazione attorno allasse z . In tal caso la sua equazione si pu`o scrivere
(v. (9.8.2))
r
2
a
2
z
2
c
2
= 1 .
Figura 9.8.2
Due iperboloidi a una falda; quella a destra `e una supercie di rotazione attorno allasse z .
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.8. Quadriche 51
Liperboloide a una falda `e rappresentato in forma parametrica dalle equazioni
_
_
x = a
u
2
+ 1 cos v ,
y = b
u
2
+ 1 sin v ,
z = c u , u R, v [0, 2] ,
oppure anche
_
_
x = a coshu cos v ,
y = b coshu sin v ,
z = c sinh u , u R, v [0, 2] .
Consideriamo ora iperboloide a due
falde
liperboloide a due falde (detto anche iperboloide ellittico), rap-
presentato dallequazione
x
2
a
2
y
2
b
2
+
z
2
c
2
= 1 , (9.8.4)
dove a, b, c R
+
, o, se si preferisce,
x
2
a
2
+
y
2
b
2
=
z
2
c
2
1 . (9.8.5)
Anche in questo caso i piani coordinati sono piani di simmetria, gli assi coor-
dinati sono assi di simmetria e lorigine delle coordinate `e centro di simmetria per
liperboloide a due falde.
Lintersezione col piano y = 0 `e liperbole di equazione x
2
/a
2
+z
2
/c
2
= 1 ; analo-
gamente lintersezione col piano x = 0 `e liperbole di equazione y
2
/b
2
+z
2
/c
2
= 1 .
Entrambe queste iperboli hanno i fuochi sullasse z .
Dallequazione (9.8.5) si riconosce immediatamente che i punti delliperboloide a
due falde hanno quota z , tale che [z[ c . Gli unici punti di questa quadrica
che hanno quota uguale a c o a c sono le intersezioni con lasse z e vengono
detti i vertici delliperboloide. Se [z
0
[ > c lintersezione delliperboloide col piano di
equazione z = z
0
`e lellisse di equazioni
_
_
_
x
2
a
2
+
y
2
b
2
=
z
2
0
c
2
1 ,
z = z
0
.
Indicando con
2
il secondo membro della prima equazione, con > 0 , si ha lellisse
di equazioni
_
_
_
x
2
2
a
2
+
y
2
2
b
2
= 1 ,
z = z
0
.
Anche in questo caso i semiassi dellellisse crescono strettamente al crescere di [z
0
[ .
Se a = b questa ellisse `e una circonferenza e dunque liperboloide a due falde `e
una supercie di rotazione attorno allasse z , la cui equazione pu`o essere scritta
r
2
a
2
=
z
2
c
2
1 .
In generale, se si interseca liperboloide con il piano z =
2 c , si ha lellisse
x
2
a
2
+
y
2
b
2
= 1 ,
dunque i parametri a e b delliperboloide possono essere interpretati come i semiassi
di tale ellisse.
G. C. Barozzi G. Dore E. Obrecht
52 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Figura 9.8.3
Due iperboloidi a due falde; a sinistra `e mostrata (in nero) anche lellisse intersezione col
piano z =
2 c .
La falda delliperboloide contenuta nel semispazio z > 0 `e rappresentata in forma
parametrica dalle equazioni
_
_
x = a
u
2
1 cos v ,
y = b
u
2
1 sinv ,
z = c u , u [1, +[ , v [0, 2] ,
mentre le stesse equazioni, ma con u ], 1] , v [0, 2] , rappresentano la falda
contenuta nel semispazio z < 0 .
Alternativamente si possono usare le equazioni parametriche
_
_
x = a sinh u cos v ,
y = b sinh u sin v ,
z = c coshu , u R
+
, v [0, 2] ,
per la falda contenuta nel semispazio z > 0 , e le stesse equazioni per x e y , ma
z = c coshu , u R
+
, per la falda contenuta nel semispazio z < 0 .
Consideriamo ora il paraboloide
ellittico
paraboloide ellittico. Dati a, b R
+
, consideriamo la supercie
descritta dallequazione cartesiana
x
2
a
2
+
y
2
b
2
= z . (9.8.6)
Questa quadrica `e interamente contenuta nel semispazio z 0 , i piani x = 0 e
y = 0 sono piani di simmetria, mentre lasse z `e asse di simmetria per il paraboloide.
Lorigine delle coordinate, che `e il punto intersezione dellasse con il paraboloide viene
detto il vertice del paraboloide. Osserviamo che questa quadrica non possiede centri
di simmetria.
Le intersezioni di tale supercie con i piani coordinati xz e yz hanno equazioni
z = x
2
/a
2
e z = y
2
/b
2
, dunque sono parabole che hanno come asse lasse z , con
la concavit`a rivolta verso il semiasse positivo z . Lintersezione con un qualsivoglia
piano contenente lasse z `e una parabola analoga. Lintersezione col piano z = z
0
,
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.8. Quadriche 53
con z
0
R
+
`e lellisse di equazioni
_
_
_
x
2
a
2
+
y
2
b
2
= z
0
,
z = z
0
;
ponendo =
z
0
, dunque z
0
=
2
, la prima equazione diventa
x
2
2
a
2
+
y
2
2
b
2
= 1 ,
cio`e lequazione dellellisse di semiassi a , b . Se a = b si ottiene una circonferenza
e allora il paraboloide (9.8.6) `e una supercie di rotazione attorno allasse z , la cui
equazione pu`o essere scritta
r
2
a
2
= z .
Figura 9.8.4
Due paraboloidi ellittici; quello di destra `e una supercie di rotazione attorno allasse z .
Il paraboloide ellittico `e rappresentato in forma parametrica dalle equazioni
_
_
x = a u cos v ,
y = b u sinv ,
z = u
2
, u R
+
, v [0, 2] .
Veniamo al paraboloide
iperbolico
paraboloide iperbolico (detto anche paraboloide a sella) descritto dal-
lequazione
x
2
a
2
y
2
b
2
= z , (9.8.7)
dove a, b R
+
.
Anche questa quadrica non ha un centro di simmetria. I piani x = 0 e y = 0 sono
piani di simmetria, mentre lasse z `e asse di simmetria.
Lintersezione di tale supercie con il piano y = 0 `e la parabola di equazione
z = x
2
/a
2
, che ha la concavit`a rivolta verso il semiasse z positivo. Lo stesso accade se
si interseca con un qualunque piano parallelo al piano xz , cio`e un piano di equazione
y = y
0
con y
0
R assegnato. Se invece si interseca col piano x = 0 , o con
un qualunque piano parallelo al piano yz , si ottiene una parabola con la concavit`a
rivolta verso il semiasse z negativo.
G. C. Barozzi G. Dore E. Obrecht
54 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Figura 9.8.5
Due paraboloidi iperbolici; nella gura di sinistra sono mostrate le rette di intersezione col
piano z = 0 .
Se poi si interseca il paraboloide iperbolico con un piano del tipo z = z
0
, con
z
0
R ssato, si ottiene la curva di equazioni
_
_
_
x
2
a
2
y
2
b
2
= z
0
,
z = z
0
.
Se z
0
> 0 , posto =
z
0
, dunque z
0
=
2
, si ottiene
x
2
2
a
2
y
2
2
b
2
= 1 .
Si tratta di uniperbole con i fuochi appartenenti ad una retta parallela allasse x .
Se invece z
0
< 0 , posto =
_
[z
0
[ , dunque z
0
=
2
, si ottiene
x
2
2
a
2
+
y
2
2
b
2
= 1 .
Questa volta si tratta di uniperbole con i fuochi appartenenti ad una parallela al-
lasse y . Se poi z
0
= 0 , cio`e intersechiamo il paraboloide col piano xy , otteniamo
lequazione
x
2
a
2
y
2
b
2
= 0 .
Questa equazione si spezza nel prodotto (x/a y/b)(x/a +y/b) = 0 , dunque rappre-
senta lunione delle due rette di equazione x/a = y/b e x/a = y/b . Il paraboloide
iperbolico non `e in alcun caso una supercie di rotazione.
Abbiamo gi`a considerato un paraboloide ellittico e un paraboloide iperbolico come
graci di forme quadratiche nellEs. 9.6.8.
Consideriamo cilindro ulteriori tipi di quadriche: i cilindri. Se p(x, y) = 0 `e lequazione
di una conica nel piano xy (dunque p `e un polinomio di secondo grado nelle
variabili x e y ), consideriamo la supercie di R
3
_
(x, y, z) R
3
p(x, y) = 0
_
. (9.8.8)
In termini espliciti: la supercie in questione `e costituita da tutti (e solo) i punti
che appartengono alle rette parallele allasse z passanti per un punto della conica .
G. C. Barozzi G. Dore E. Obrecht
c 978-88-08-00000-0 9.8. Quadriche 55
Appartengono a tali rette tutti (e soltanto) i punti (x, y, z) R
3
tali che p(x, y) = 0 .
La conica viene detta direttrice,
generatrice
direttrice del cilindro e le rette parallele allasse z generatrici
del cilindro stesso.
A seconda del tipo di conica direttrice abbiamo il cilindro ellittico (v. Fig. 9.8.6 a
sinistra), di equazione
x
2
a
2
+
y
2
b
2
= 1 ,
con a, b R
+
, il cilindro iperbolico (v. Fig. 9.8.6 a destra), di equazione
x
2
a
2
y
2
b
2
= 1 ,
con a, b R
+
, il cilindro parabolico(v. Fig. 9.8.7 a sinistra), di equazione
y = ax
2
,
con a R
.
Figura 9.8.6
Il cilindro che ha come direttrice lellisse di equazione x
2
/a
2
+y
2
/b
2
= 1 , con a = 2 , b = 1.5
(a sinistra). Il cilindro che ha come direttrice liperbole di equazione y
2
x
2
= 1 (a destra).
Naturalmente possiamo anche considerare cilindri per i quali la conica direttrice
`e contenuta nel piano xz e le generatrici sono parallele allasse y , oppure cilindri
per i quali la conica direttrice appartiene al piano yz e le generatrici sono parallele
allasse x . NellEs. 9.6.8 abbiamo considerato il cilindro parabolico di equazione
z = x
2
(v. Fig. 9.6.1, graco al centro); esso ha come direttrice la parabola avente la
stessa equazione, contenuta nel piano xz , e le generatrici parallele allasse y .
Consideriamo un ultimo tipo di quadrica: il cono cono. Data unellisse contenuta nel
piano xy e un punto v non appartenente a esso, il cono di vertice v e direttrice
si ottiene considerando lunione delle rette passanti per v e per un punto di . Tali
rette sono dette le generatrici del cono.
Se v = (0, 0, h) , con h ,= 0 , e lellisse ha equazioni
_
_
_
x
2
a
2
+
y
2
b
2
= 1 ,
z = 0 ,
G. C. Barozzi G. Dore E. Obrecht
56 Capitolo 9. Concetti introduttivi c 978-88-08-00000-0
Figura 9.8.7
A sinistra: il cilindro che ha come direttrice la parabola y = x
2
1 ; a destra il cono che
ha come direttrice lellisse x
2
/a
2
+ y
2
/b
2
= 1 , con a = 2 , b = 1.5 , e come vertice il punto
v = (0, 0, 2.5) .
si riconosce che lequazione cartesiana del cono `e
x
2
a
2
+
y
2
b
2
=
(z h)
2
h
2
.
I piani di equazione x = 0 , y = 0 e z = h sono piani di simmetria per il cono, le
rette di equazioni
_
x = 0 ,
z = h,
e
_
y = 0 ,
z = h.
nonche lasse z sono assi di simmetria, il vertice `e centro di simmetria.
Le equazioni parametriche del cono si scrivono
_
_
x = a
h u
h
cos v ,
y = b
h u
h
sin v ,
z = u , u R, v [0, 2] .
G. C. Barozzi G. Dore E. Obrecht
You might also like
- Elementi Cap 10Document40 pagesElementi Cap 10gigiLombricoNo ratings yet
- Compendio Alla GnosiDocument111 pagesCompendio Alla GnosigloriaNo ratings yet
- Esercizi - I VettoriDocument10 pagesEsercizi - I Vettorivin_hiworldNo ratings yet
- GestioneProgetti PDFDocument117 pagesGestioneProgetti PDFgigiLombricoNo ratings yet
- Manuale Web3Document41 pagesManuale Web3gigiLombricoNo ratings yet
- Prontuario Travi MartiniDocument6 pagesProntuario Travi MartinigigiLombricoNo ratings yet
- 1077 Cristallo Estate07Document4 pages1077 Cristallo Estate07gigiLombricoNo ratings yet
- Lyxor Etf DJ Stoxx 600 Oil & Gas Prospetto CompletoDocument19 pagesLyxor Etf DJ Stoxx 600 Oil & Gas Prospetto CompletogigiLombricoNo ratings yet
- Scheda EtlxDocument5 pagesScheda EtlxgigiLombricoNo ratings yet
- Iprass GuidaDocument24 pagesIprass GuidagigiLombricoNo ratings yet
- US105756BR01Document2 pagesUS105756BR01gigiLombricoNo ratings yet
- Thermostatic Heads IT LowDocument24 pagesThermostatic Heads IT LowgigiLombricoNo ratings yet
- Manuale QT 2.0Document98 pagesManuale QT 2.0gigiLombricoNo ratings yet
- ReportDocument10 pagesReportgigiLombricoNo ratings yet
- Lyxor Etf DJ Stoxx 600 Basic ResourcesDocument22 pagesLyxor Etf DJ Stoxx 600 Basic ResourcesgigiLombricoNo ratings yet
- Normativa RumoreDocument9 pagesNormativa RumoregigiLombricoNo ratings yet
- Kiid Ir Ishiii Ishares Emerging Markets Local Government Bond Ucits Etf It Ie00b5m4wh52 ItDocument2 pagesKiid Ir Ishiii Ishares Emerging Markets Local Government Bond Ucits Etf It Ie00b5m4wh52 ItgigiLombricoNo ratings yet
- La Macchina Di Watt e La Rivoluzione IndustrialeDocument3 pagesLa Macchina Di Watt e La Rivoluzione IndustrialegigiLombricoNo ratings yet
- Cost It Uzi One Europe ADocument10 pagesCost It Uzi One Europe AgigiLombricoNo ratings yet
- Test of Ebb Raio 1998Document5 pagesTest of Ebb Raio 1998gigiLombricoNo ratings yet
- Settoriali BassaDocument2 pagesSettoriali BassagigiLombricoNo ratings yet
- Settoriali BassaDocument2 pagesSettoriali BassagigiLombricoNo ratings yet
- Lez18 UrtiDocument11 pagesLez18 UrtigigiLombricoNo ratings yet
- Prospectus Ishares ItDocument74 pagesProspectus Ishares ItgigiLombricoNo ratings yet
- Lyxor Etf DJ Stoxx 600 Oil & Gas Prospetto CompletoDocument19 pagesLyxor Etf DJ Stoxx 600 Oil & Gas Prospetto CompletogigiLombricoNo ratings yet
- UegbookDocument651 pagesUegbookgigiLombricoNo ratings yet
- Settoriali BassaDocument2 pagesSettoriali BassagigiLombricoNo ratings yet
- WWW - Diem.ing - Unibo.it Diem Cali DML Meccanica Tavole e Reg AA2013-2014 Tavola DMA 06-13-14 4sDocument1 pageWWW - Diem.ing - Unibo.it Diem Cali DML Meccanica Tavole e Reg AA2013-2014 Tavola DMA 06-13-14 4sgigiLombricoNo ratings yet
- Geometria EsamiBonettiDocument22 pagesGeometria EsamiBonettigigiLombricoNo ratings yet
- Elementi Cap 12Document35 pagesElementi Cap 12gigiLombricoNo ratings yet
- Elementi Cap 11Document42 pagesElementi Cap 11gigiLombricoNo ratings yet
- Il Tempo Eterno Di DioDocument58 pagesIl Tempo Eterno Di DioLuca Dal SantoNo ratings yet
- Le Corbusier - "Avanguardia Della Tradizione"Document15 pagesLe Corbusier - "Avanguardia Della Tradizione"Francesco BagnoliNo ratings yet
- Significato Geometrico Di DerivataDocument4 pagesSignificato Geometrico Di DerivataAnna VellucciNo ratings yet
- Leban-FdP2018 FlessioneDocument30 pagesLeban-FdP2018 FlessioneSteel_catNo ratings yet
- Trasformazioni DatumDocument13 pagesTrasformazioni DatumAndrea MackoNo ratings yet
- Berkeley e Mach Contro Lo Spazio AssolutoDocument3 pagesBerkeley e Mach Contro Lo Spazio AssolutoEsonet.orgNo ratings yet
- Antipolo RettaDocument9 pagesAntipolo RettaHULIOSMELLANo ratings yet
- Storia Della Musica AmericanaDocument148 pagesStoria Della Musica AmericanaantoniosainaNo ratings yet
- La Fisica Di Feynman 2 Cosa Sono I CampiDocument2 pagesLa Fisica Di Feynman 2 Cosa Sono I Campiawertu567No ratings yet
- 01 Spazi VettorialiDocument10 pages01 Spazi VettorialiFrancesco VaroneNo ratings yet
- Camillo Berti Note Sulla TopografiaDocument368 pagesCamillo Berti Note Sulla TopografiaPalumbo MichaelNo ratings yet
- E. Spinazzola DefinitivoDocument6 pagesE. Spinazzola DefinitivosimoroncoNo ratings yet
- Esercitazione 4Document9 pagesEsercitazione 4LeonardoNo ratings yet
- Il Potere Di Adesso SintesiDocument8 pagesIl Potere Di Adesso SintesiAntonio VaccarelloNo ratings yet
- Dispense GeometriaDocument16 pagesDispense GeometriabeniNo ratings yet
- Teofilo. Scemenze. Io Posso Dirti Che Cosa Suscita in Me La Gioconda. Aletofilo. E A Me Non Interessa Per Niente, in Questo ContestoDocument13 pagesTeofilo. Scemenze. Io Posso Dirti Che Cosa Suscita in Me La Gioconda. Aletofilo. E A Me Non Interessa Per Niente, in Questo ContestoFrancesco SorceNo ratings yet