You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- BhagavatamDocument558 pagesBhagavatamSarmaBvr100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Comparative Study of Wheel Rim Materials Ijariie1437Document4 pagesComparative Study of Wheel Rim Materials Ijariie1437simalaraviNo ratings yet
- Limits, Fits and TolerancesDocument4 pagesLimits, Fits and Tolerancessimalaravi100% (1)
- Vam DaikinDocument146 pagesVam Daikinntt_1219870% (1)
- Metallurgical Thermo DynamicsDocument567 pagesMetallurgical Thermo Dynamicspahnin100% (4)
- Bel 7268Document168 pagesBel 7268Djamila BENYOUCEFNo ratings yet
- Understanding Heat Flux Limitations CCTI 2010Document8 pagesUnderstanding Heat Flux Limitations CCTI 2010B rgNo ratings yet
- Aspen Distil Com Thermo Reference GuideDocument315 pagesAspen Distil Com Thermo Reference GuideRolando ValdiviaNo ratings yet
- Course Title Geometric Dimensioning and Tolerancing Course Code MD213Document3 pagesCourse Title Geometric Dimensioning and Tolerancing Course Code MD213simalaraviNo ratings yet
- Design For Adhesively Bonded AssembliesDocument6 pagesDesign For Adhesively Bonded AssembliessimalaraviNo ratings yet
- Engg Materials Lab Manual Kle UniveristyDocument42 pagesEngg Materials Lab Manual Kle UniveristysimalaraviNo ratings yet
- Mechanical Technology - Comparators - Multiple Choice Questions and AnswersDocument4 pagesMechanical Technology - Comparators - Multiple Choice Questions and Answerssimalaravi100% (1)
- UNIT-5 Industrial Management B Tech VI Sem (Detailed Notes)Document4 pagesUNIT-5 Industrial Management B Tech VI Sem (Detailed Notes)simalaravi50% (2)
- Surface Treatments, Coatings, and CleaningDocument13 pagesSurface Treatments, Coatings, and CleaningsimalaraviNo ratings yet
- UNIT-4 Industrial Management B Tech VI Sem (Detailed Notes)Document25 pagesUNIT-4 Industrial Management B Tech VI Sem (Detailed Notes)simalaraviNo ratings yet
- 7-Assembly Line Problems SolutionDocument8 pages7-Assembly Line Problems SolutionsimalaraviNo ratings yet
- UG Fees NotificationDocument1 pageUG Fees NotificationsimalaraviNo ratings yet
- Technical Guidelines: Physical Properties of Refrigerants R-410ADocument2 pagesTechnical Guidelines: Physical Properties of Refrigerants R-410AYaxmine Edward StylesNo ratings yet
- Problem Sheet 12-13 QuestionsDocument1 pageProblem Sheet 12-13 QuestionsWill Morgan-EvansNo ratings yet
- Zeroth Law of Thermodynamics MCQ Quiz - Objective Question With Answer For Zeroth Law of Thermodynamics - Download Free PDFDocument34 pagesZeroth Law of Thermodynamics MCQ Quiz - Objective Question With Answer For Zeroth Law of Thermodynamics - Download Free PDFVinayak SavarkarNo ratings yet
- Process Simulation of Heat ExchangerDocument5 pagesProcess Simulation of Heat ExchangersumitNo ratings yet
- Blackbody RadiationDocument19 pagesBlackbody Radiationlenc46No ratings yet
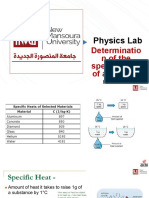
- Physics Lab: Determinatio Nofthe Specific Heat of A Solid by MixingDocument12 pagesPhysics Lab: Determinatio Nofthe Specific Heat of A Solid by MixingFelix SNo ratings yet
- Week 007 Module ThermochemistryDocument12 pagesWeek 007 Module ThermochemistryFigh terNo ratings yet
- Shortcut Distillation: Agung Ari Wibowo, S.T., M.SC Politeknik Negeri Malang Malang - IndonesiaDocument15 pagesShortcut Distillation: Agung Ari Wibowo, S.T., M.SC Politeknik Negeri Malang Malang - IndonesiaRIDONo ratings yet
- 3.5.1 Gas Pressure: Mean Speed of The ParticlesDocument2 pages3.5.1 Gas Pressure: Mean Speed of The ParticlesAyat Essa AlshamistiNo ratings yet
- Designing A Cold Storage and It's Refrigeration System: ThemeDocument12 pagesDesigning A Cold Storage and It's Refrigeration System: ThemeAi VInNo ratings yet
- (Cont'd) Review of Baisc ConceptsDocument60 pages(Cont'd) Review of Baisc Conceptskevintjj35No ratings yet
- 03 - Station Performance and Operation CharacteristicDocument41 pages03 - Station Performance and Operation CharacteristicrakibNo ratings yet
- Final Year Project On Solar Water HeaterDocument66 pagesFinal Year Project On Solar Water HeaterHailemariam Weldegebral100% (1)
- Lab 1Document3 pagesLab 1milek mathewNo ratings yet
- 08 MettlerDocument31 pages08 MettlerKirubakar ThamaraikannanNo ratings yet
- Crystallization Prob Set PDFDocument2 pagesCrystallization Prob Set PDFBea BacaniNo ratings yet
- Experi Met 06Document7 pagesExperi Met 06Daniel Carlos Vidal DíazNo ratings yet
- ARNU18 Gtqc4: Btu/h Indoor UnitDocument2 pagesARNU18 Gtqc4: Btu/h Indoor Unitwinder chanta peñaNo ratings yet
- Article - PWA-BWPDocument2 pagesArticle - PWA-BWPmahmoud mohamedNo ratings yet
- V G I S: On Variable-Primary FlowDocument5 pagesV G I S: On Variable-Primary FlowSantiago J. ramos jrNo ratings yet
- Gas-Vapor Mixtures: Diah Susanti, PH.DDocument26 pagesGas-Vapor Mixtures: Diah Susanti, PH.DDiana KamaliyahNo ratings yet
- Document 1 2Document14 pagesDocument 1 2karem ahmedNo ratings yet
- Gas Power Cycles: Mechanical Engineering Thermodynamics 2Document38 pagesGas Power Cycles: Mechanical Engineering Thermodynamics 2Hugh JackNo ratings yet