You might also like
- Antologia de Poesia Norteamericana PDFDocument665 pagesAntologia de Poesia Norteamericana PDFDidi Alvarez100% (3)
- Comandantes funerariosDocument84 pagesComandantes funerariosrotcivicius0% (1)
- Guía de soluciones para problemas comunes en TV GrundigDocument42 pagesGuía de soluciones para problemas comunes en TV GrundigDiego Sarapura50% (2)
- Tabla de Modulos de ElasticidadDocument2 pagesTabla de Modulos de ElasticidadGerald Ronald Gamonal Siapo79% (24)
- Cadenas MiofascialesDocument170 pagesCadenas Miofascialesk_nii100% (3)
- Turorial Sobre Protel99seDocument9 pagesTurorial Sobre Protel99sexxunilNo ratings yet
- Conceptos básicos de geometría EuclidianaDocument160 pagesConceptos básicos de geometría EuclidianaJesu Jim SulNo ratings yet
- ÁngulosDocument2 pagesÁngulosxxunilNo ratings yet
- Arrancar Desde USB-CD en PCs ViejasDocument1 pageArrancar Desde USB-CD en PCs ViejasxxunilNo ratings yet
- Codigos SamsungDocument3 pagesCodigos SamsungxxunilNo ratings yet
- Kaiten PDFDocument1 pageKaiten PDFxxunilNo ratings yet
- PrintDocument1 pagePrintxxunilNo ratings yet
- 12 Prog Geoaguilera 3 PDFDocument3 pages12 Prog Geoaguilera 3 PDFxxunilNo ratings yet
- El test que revela la edad real de tu cuerpoDocument16 pagesEl test que revela la edad real de tu cuerpoAlex CarreraNo ratings yet
- Factores que desencadenan los trastornos alimenticiosDocument12 pagesFactores que desencadenan los trastornos alimenticiosmary_calderón_41No ratings yet
- Descripcion de Un Microcontrolador (Modulos de Comunicacion) HC908Document62 pagesDescripcion de Un Microcontrolador (Modulos de Comunicacion) HC908Edwin Javier Garavito HernándezNo ratings yet
- Pal Indro MoDocument1 pagePal Indro MoxxunilNo ratings yet
- DDWRT Pon Tu Router Como Client-Beta-0.1Document10 pagesDDWRT Pon Tu Router Como Client-Beta-0.1xxunilNo ratings yet
- IradioDocument4 pagesIradioinfobitsNo ratings yet
- Arrancar Desde USB-CD en PCs ViejasDocument1 pageArrancar Desde USB-CD en PCs ViejasxxunilNo ratings yet
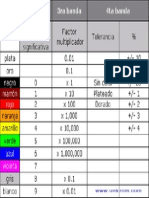
- Codigo Colores ResistoresDocument1 pageCodigo Colores ResistoresxxunilNo ratings yet
- Servo MotorDocument5 pagesServo MotorVictor MontesNo ratings yet
- Comunicación básica y gramática elemental en inglésDocument66 pagesComunicación básica y gramática elemental en inglésmacvighi100% (2)
- TP 2Document22 pagesTP 2xxunilNo ratings yet
- DDWRT Pon Tu Router Como Client-Beta-0.1Document10 pagesDDWRT Pon Tu Router Como Client-Beta-0.1xxunilNo ratings yet
- Carta de SmithDocument1 pageCarta de SmithxxunilNo ratings yet
- TerminologiaDocument1 pageTerminologiaxxunilNo ratings yet
- Ord 2964 11 BO 504 CFM y OT PDFDocument84 pagesOrd 2964 11 BO 504 CFM y OT PDFFernando JardinNo ratings yet
- Prueba de Ciencias Naturales Grado QuintoDocument2 pagesPrueba de Ciencias Naturales Grado QuintoEdson Noel Flórez Alvarado100% (2)
- Redes 1Document16 pagesRedes 1Andres RomeroNo ratings yet
- Estructura Del Trabajo Final ComprasDocument2 pagesEstructura Del Trabajo Final ComprasNelva SilviaNo ratings yet
- Bajo Las Tres TulpasDocument2 pagesBajo Las Tres TulpasgojoluNo ratings yet
- Teatro en Tu Sala - Irrupción Del Teatro Dentro Del Aula. CARE.Document4 pagesTeatro en Tu Sala - Irrupción Del Teatro Dentro Del Aula. CARE.Jrg Rtz ClmNo ratings yet
- Examen ParcialDocument3 pagesExamen ParcialAdriano FernandezNo ratings yet
- SOLTest Tema1 23-24Document15 pagesSOLTest Tema1 23-24DANIEL DE MINGONo ratings yet
- Capitulo 4 Preparación, Primera Parte: Participantes, Colegas e InteresesDocument13 pagesCapitulo 4 Preparación, Primera Parte: Participantes, Colegas e InteresesMajo PereyraNo ratings yet
- Paper Economia DescriptivaDocument266 pagesPaper Economia DescriptivaCamilo Duarte ForeroNo ratings yet
- OFERTA Y DEMANDA AGREGADADocument8 pagesOFERTA Y DEMANDA AGREGADAluciaNo ratings yet
- Ejemplos retención percepción detracción IGVDocument6 pagesEjemplos retención percepción detracción IGVJedar RiveraNo ratings yet
- Biologia - Texto de Apoyo EspecializadosDocument50 pagesBiologia - Texto de Apoyo EspecializadosDavid Sinko YapuNo ratings yet
- Gestion Del Sistema Electrico - P1Document10 pagesGestion Del Sistema Electrico - P1Ivan O'Connor RamírezNo ratings yet
- Energías renovables para la agricultura familiarDocument200 pagesEnergías renovables para la agricultura familiarDanielNo ratings yet
- Mejores Navegadores de InternetDocument42 pagesMejores Navegadores de InternetGarcia WilbertNo ratings yet
- Certificado Coordinador Trabajo en AlturasDocument1 pageCertificado Coordinador Trabajo en AlturasAnonymous qrdoZqlNo ratings yet
- Matriz Foda Del Programa de Turismo y HoteleríaDocument3 pagesMatriz Foda Del Programa de Turismo y HoteleríaGianella Bailon100% (1)
- Preguntas de ExamenDocument5 pagesPreguntas de ExamenJosué Manuel Martínez ArellanoNo ratings yet
- Matriz DhiDocument5 pagesMatriz DhiDiego MolinaNo ratings yet
- Ejercicios de Ciencia y Tecnología de MaterialesDocument4 pagesEjercicios de Ciencia y Tecnología de MaterialesDre DrNo ratings yet
- Manual de Puestos D'gustapanDocument23 pagesManual de Puestos D'gustapanEdson Obdulio Lopez XicaraNo ratings yet
- Estados financieros Hotella Lees 2009-2008Document25 pagesEstados financieros Hotella Lees 2009-2008Claudia Floridalma Hernández CholotíoNo ratings yet
- La Entrega A CristoDocument76 pagesLa Entrega A CristoNeiser VillanuevaNo ratings yet
- Ley contra la discriminaciónDocument2 pagesLey contra la discriminaciónClaudia LedesmaNo ratings yet
- Plan de desarrollo 2020-2023 Nuestro Motivo Colón adoptado por el Concejo MunicipalDocument173 pagesPlan de desarrollo 2020-2023 Nuestro Motivo Colón adoptado por el Concejo MunicipalUNION GLOBAL0% (1)