You might also like
- 350W Single Output Switching Power SupplyDocument2 pages350W Single Output Switching Power SupplyJuan David Velasquez BranNo ratings yet
- 300W Single Output With PFC Function: SeriesDocument6 pages300W Single Output With PFC Function: SeriesJuan David Velasquez BranNo ratings yet
- WhatsupgDocument248 pagesWhatsupgJuan David Velasquez BranNo ratings yet
- ARC1 3.0 Jan15 StudentWorkbookDocument306 pagesARC1 3.0 Jan15 StudentWorkbookJuan David Velasquez Bran100% (2)
- An InsightDocument48 pagesAn InsightJuan David Velasquez BranNo ratings yet
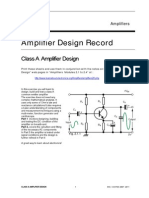
- Amplifier Design RecordDocument5 pagesAmplifier Design RecordJuan David Velasquez BranNo ratings yet
- Lectura 1Document28 pagesLectura 1Jose AlexanderNo ratings yet
- 2N3791 & 2N3792Document3 pages2N3791 & 2N3792Juan David Velasquez BranNo ratings yet
- Technical Bulletin: Subject: Changes To DIRECTV Latin America Satellite at 95°WDocument2 pagesTechnical Bulletin: Subject: Changes To DIRECTV Latin America Satellite at 95°WJuan David Velasquez BranNo ratings yet
- Diodo 1N5221B PDFDocument3 pagesDiodo 1N5221B PDFJuan David Velasquez BranNo ratings yet
- Diodo 1N5221B PDFDocument3 pagesDiodo 1N5221B PDFJuan David Velasquez BranNo ratings yet
- TPL-250 DatasheetDocument8 pagesTPL-250 DatasheetanthonyNo ratings yet
- v1r1 ComNav SSRC1 Installation Operation Manual PDFDocument20 pagesv1r1 ComNav SSRC1 Installation Operation Manual PDFJuan David Velasquez BranNo ratings yet
- S6025LDocument13 pagesS6025Lluis_19ECNo ratings yet
- 1N5232B - Diodo ZenerDocument3 pages1N5232B - Diodo ZenerJuan David Velasquez BranNo ratings yet
- Bsp297-Sipmos SMDDocument10 pagesBsp297-Sipmos SMDJuan David Velasquez BranNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- FLTK ManualDocument1,053 pagesFLTK ManualDavid KorabellNo ratings yet
- Teaching and Learning Robotic Arm Model: Kadirimangalam Jahnavi Sivraj PDocument6 pagesTeaching and Learning Robotic Arm Model: Kadirimangalam Jahnavi Sivraj PCătălin PuțoiNo ratings yet
- Informatica Forence 10 2013Document62 pagesInformatica Forence 10 2013Carlos Bernal100% (1)
- What'S New: Sap Businessobjects Bi Suite Document Version: 4.2 Sp5 - 2017-12-15Document66 pagesWhat'S New: Sap Businessobjects Bi Suite Document Version: 4.2 Sp5 - 2017-12-15sudhir.kanakotiNo ratings yet
- User Interface Design: Purbanchal University: Bit Iii SemesterDocument90 pagesUser Interface Design: Purbanchal University: Bit Iii Semesterrupak dangiNo ratings yet
- TVL Comprog11 q3 m3Document13 pagesTVL Comprog11 q3 m3Boiztupidoh Oof D'WestNo ratings yet
- Hci Lab 01 (21-Se-101)Document5 pagesHci Lab 01 (21-Se-101)Agha Muhammad Yar KhanNo ratings yet
- Project ReportDocument42 pagesProject ReportZainulAnsariNo ratings yet
- Manual de Operação Do SMA-1kDocument102 pagesManual de Operação Do SMA-1kgbaetaNo ratings yet
- 01 - BIF 506 (Fundamentals of Computing)Document36 pages01 - BIF 506 (Fundamentals of Computing)Neeru RedhuNo ratings yet
- Computer SkillsDocument500 pagesComputer SkillsosmanamNo ratings yet
- OS Lecture 1Document17 pagesOS Lecture 1Md Masum BillahNo ratings yet
- Rift Valley University Faculty of EngineeringDocument2 pagesRift Valley University Faculty of EngineeringSamir HuseinNo ratings yet
- Redhawk User Manual: Software Release 15.2Document994 pagesRedhawk User Manual: Software Release 15.2jianan yaoNo ratings yet
- Glade TutorialDocument5 pagesGlade TutorialRey Marc ParedesNo ratings yet
- Installation GuideDocument16 pagesInstallation GuideRajNo ratings yet
- Accellos - Guide - V60BarTender PDFDocument10 pagesAccellos - Guide - V60BarTender PDFcaplusinc100% (1)
- Intro To VB 7 March 2013Document324 pagesIntro To VB 7 March 2013Rubén Merinos MargüelloNo ratings yet
- PDMS-Pipework Design User GuideDocument414 pagesPDMS-Pipework Design User GuideShyam Prasad K S75% (4)
- CONTROL M Ccontrol Module For PeopleSoftDocument80 pagesCONTROL M Ccontrol Module For PeopleSoftxwNo ratings yet
- Spirits TutorialDocument117 pagesSpirits TutorialDaniel Garbellini DuftNo ratings yet
- Progress MonitoringDocument7 pagesProgress MonitoringGihanEdiriNo ratings yet
- ThingPark Wireless - Logger GUI User GuideDocument12 pagesThingPark Wireless - Logger GUI User GuideOfer KrausNo ratings yet
- Symantec Netbackup 7.5 For Unix: Install, Configure, and Deploy (Appendix B)Document338 pagesSymantec Netbackup 7.5 For Unix: Install, Configure, and Deploy (Appendix B)Dheeraj Kumar SinghNo ratings yet
- An Integrated Data Flow Visual Language and Software Development EnvironmentDocument30 pagesAn Integrated Data Flow Visual Language and Software Development EnvironmentBoban CelebicNo ratings yet
- Th6D ABB Ethernet Interface: Translation of The Original Technical InformationDocument25 pagesTh6D ABB Ethernet Interface: Translation of The Original Technical InformationMihail AvramovNo ratings yet
- NAM User BookDocument294 pagesNAM User BookvyarthNo ratings yet
- Computer AbbreviationsDocument4 pagesComputer AbbreviationsmeghanadivaNo ratings yet
- Informatics Practices ProjectDocument27 pagesInformatics Practices ProjectSuianaNo ratings yet
- CS6306-Prelim Exam - Attempt ReviewDocument20 pagesCS6306-Prelim Exam - Attempt ReviewHarvey MendozaNo ratings yet