You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- WEG Regulador de Tensao Grt7 Th4 10040217 Manual Portugues BRDocument50 pagesWEG Regulador de Tensao Grt7 Th4 10040217 Manual Portugues BRJuan I. Meza Lozano100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- How To Review PV Elite Design Report PDFDocument9 pagesHow To Review PV Elite Design Report PDFprocess process100% (1)
- How To Review PV Elite Design Report PDFDocument9 pagesHow To Review PV Elite Design Report PDFprocess process100% (1)
- How To Review PV Elite Design Report PDFDocument9 pagesHow To Review PV Elite Design Report PDFprocess process100% (1)
- How To Review PV Elite Design Report PDFDocument9 pagesHow To Review PV Elite Design Report PDFprocess process100% (1)
- Measurements & Electronic Instruments Laboratory Experiment ManualDocument3 pagesMeasurements & Electronic Instruments Laboratory Experiment Manualfirst lastNo ratings yet
- Alok Sr. Sec. School: Hiran Magri, Sector-11 Udaipur Session 2019-2020 A Physics ProjectDocument21 pagesAlok Sr. Sec. School: Hiran Magri, Sector-11 Udaipur Session 2019-2020 A Physics ProjectShivani Damor100% (1)
- Battery 3214-30Document43 pagesBattery 3214-30herrisutrisna100% (4)
- 2VAA000720R0001 A en S Control Harmony Bridge Controller With Ethernet (BRC-410) User ManualDocument95 pages2VAA000720R0001 A en S Control Harmony Bridge Controller With Ethernet (BRC-410) User ManualanbarasanNo ratings yet
- 5G Network Technical Department Agenda: Key Features and TrendsDocument17 pages5G Network Technical Department Agenda: Key Features and TrendsMr LazyNo ratings yet
- New Vendor Registration RequirementsDocument1 pageNew Vendor Registration RequirementsDytta AchmadNo ratings yet
- English TT MT 2007Document206 pagesEnglish TT MT 2007Wong DaNo ratings yet
- Level Sensor Pancake PR 6251 and Mounting Kit PR 6051: The Space-Saving Solution For Simple ApplicationsDocument8 pagesLevel Sensor Pancake PR 6251 and Mounting Kit PR 6051: The Space-Saving Solution For Simple ApplicationsDytta AchmadNo ratings yet
- Ijct 1 (5) 305-307Document46 pagesIjct 1 (5) 305-307Anonymous v5uipHNo ratings yet
- Welding Adapter For Process Sensors: Welding Adapt D50/G1Document1 pageWelding Adapter For Process Sensors: Welding Adapt D50/G1Dytta AchmadNo ratings yet
- 30GTC009-045 Air-Cooled Reciprocating Liquid Chillers 50HZ Installation, Start-Up and Service InstructionsDocument43 pages30GTC009-045 Air-Cooled Reciprocating Liquid Chillers 50HZ Installation, Start-Up and Service InstructionsDytta AchmadNo ratings yet
- Malaysia SAMURAI Colour CardDocument8 pagesMalaysia SAMURAI Colour CardDytta AchmadNo ratings yet
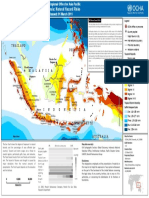
- 3794 Ochaidnhazardv4110606 PDFDocument1 page3794 Ochaidnhazardv4110606 PDFAlif GhazaliNo ratings yet
- Steady Flow of A Cement Slurry: ArticleDocument27 pagesSteady Flow of A Cement Slurry: ArticleNIRAJ DUBEYNo ratings yet
- First G 1/2 Pressure Sensor With Hygienic Approval For Small PipesDocument2 pagesFirst G 1/2 Pressure Sensor With Hygienic Approval For Small PipesDytta AchmadNo ratings yet
- Pressure Vessel DesignDocument2 pagesPressure Vessel Designcal2_uniNo ratings yet
- MECHATRONICSDocument16 pagesMECHATRONICSSHIVAJI CHOUDHURY95% (19)
- Work Plan TempleDocument2 pagesWork Plan TempleromeeNo ratings yet
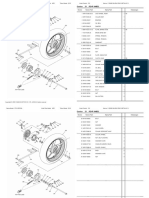
- Fz16 Byson Rear WheelDocument2 pagesFz16 Byson Rear WheelDytta AchmadNo ratings yet
- Work Plan TempleDocument2 pagesWork Plan TempleromeeNo ratings yet
- Work Plan TempleDocument2 pagesWork Plan TempleromeeNo ratings yet
- Pipe Outside Diameter Comparison TableDocument1 pagePipe Outside Diameter Comparison TableDytta AchmadNo ratings yet
- PKPS69Document40 pagesPKPS69Ari Satria100% (1)
- PKPS69Document40 pagesPKPS69Ari Satria100% (1)
- MECHATRONICSDocument16 pagesMECHATRONICSSHIVAJI CHOUDHURY95% (19)
- Republic of Indonesia Department of Communications: Civil Aviation Safety Regulation (Casr)Document16 pagesRepublic of Indonesia Department of Communications: Civil Aviation Safety Regulation (Casr)Dytta AchmadNo ratings yet
- Sprayer NozzleDocument1 pageSprayer NozzleDytta AchmadNo ratings yet
- Mechatronics UavDocument14 pagesMechatronics UavMahmoud Abdul Wahab MahmoudNo ratings yet
- PKPS69Document40 pagesPKPS69Ari Satria100% (1)
- 71 Busbar-Power PDFDocument6 pages71 Busbar-Power PDFVladNo ratings yet
- Computer 8 Fourth QuarterDocument8 pagesComputer 8 Fourth QuarterReygina Mae Sibayan PalaganasNo ratings yet
- 70 Series Maintenance Training Manual - MitsuDocument299 pages70 Series Maintenance Training Manual - Mitsuboystudy83100% (1)
- Walker P1016 Nmea Splitter PDFDocument8 pagesWalker P1016 Nmea Splitter PDFVipin KrishnanNo ratings yet
- T 258Document62 pagesT 258Anonymous NYymdHgyNo ratings yet
- Battery DesulfatorsDocument4 pagesBattery DesulfatorsAlex MaianoNo ratings yet
- EMC quiz questionsDocument1 pageEMC quiz questionsSree MurthyNo ratings yet
- PM4018MUDocument11 pagesPM4018MUaldo_suviNo ratings yet
- Section7 1-DTT PT2 IexDocument12 pagesSection7 1-DTT PT2 Iexramkumartanwar100% (1)
- General : Group 00EDocument16 pagesGeneral : Group 00Eopa952ya.ruNo ratings yet
- Philips LED 12836redb1 21 Watts 5 Watts 21w/5w Dois PolosDocument2 pagesPhilips LED 12836redb1 21 Watts 5 Watts 21w/5w Dois PolosExclusivo1No ratings yet
- Humidity & Temperature Datalogger: Model RHT20Document5 pagesHumidity & Temperature Datalogger: Model RHT20Calibration Abu DhabiNo ratings yet
- Dave Wilson: 2012 Texas Instruments Motor Control TrainingDocument25 pagesDave Wilson: 2012 Texas Instruments Motor Control TrainingDongchoon GimNo ratings yet
- Arteche Mu HV Ug User+Manual enDocument17 pagesArteche Mu HV Ug User+Manual enPrime useNo ratings yet
- Microcomputer and System BUSDocument25 pagesMicrocomputer and System BUSRocky Samrat100% (1)
- D MicroTronDocument2 pagesD MicroTronLh KooNo ratings yet
- NEMA23 Closed Loop Stepper MotorDocument3 pagesNEMA23 Closed Loop Stepper MotorGaurav MahajanNo ratings yet
- Composite Reliability Analysis of 500 KV Jawa-Bali System Related To The Northern Jawa Generation and Transmission Expansion PlanDocument5 pagesComposite Reliability Analysis of 500 KV Jawa-Bali System Related To The Northern Jawa Generation and Transmission Expansion PlanMega SetiawanNo ratings yet
- 2014 Winter Model Answer PaperDocument25 pages2014 Winter Model Answer Papernavneet100% (1)
- Sanyo PLC Xe20Document2 pagesSanyo PLC Xe20f41z786No ratings yet
- Temperature Sensor Instruction ManualDocument41 pagesTemperature Sensor Instruction ManualFARHANUDDIN100% (1)
- Chapter 10 - MLSDocument8 pagesChapter 10 - MLSEl Shazly SaidNo ratings yet
- Esquema Eléc. Frigo CarnesDocument154 pagesEsquema Eléc. Frigo CarnesIgnacio Vives RicartNo ratings yet
- Mps1000 ManualDocument46 pagesMps1000 ManualAnne NicoletaNo ratings yet