You might also like
- Implementin Iso 12646Document14 pagesImplementin Iso 12646HectorJulianRellosoNuñezNo ratings yet
- Flex MG ArchDocument44 pagesFlex MG ArchsdfasdfkksfjNo ratings yet
- Manifolds in Costing ProjectDocument13 pagesManifolds in Costing ProjectAbraham JyothimonNo ratings yet
- Kinetic Uncertainty Single Chance ConstraintDocument9 pagesKinetic Uncertainty Single Chance ConstraintShu-Bo YangNo ratings yet
- Zhang - A General Robust-Optimization Formulation For Nonlinear ProgrammingDocument14 pagesZhang - A General Robust-Optimization Formulation For Nonlinear Programmingfernando_mart859243No ratings yet
- Institute of Mathematical StatisticsDocument27 pagesInstitute of Mathematical StatisticsjohanosorioNo ratings yet
- Validación Formulario CMM y Software Evaluación ToleranciaDocument10 pagesValidación Formulario CMM y Software Evaluación ToleranciaAdolfo RodriguezNo ratings yet
- Floudas2001 Global Optimization in Design Under Uncertainty Feasibility Test and Flexibility Index ProblemsDocument16 pagesFloudas2001 Global Optimization in Design Under Uncertainty Feasibility Test and Flexibility Index ProblemsAhmed Mohamed KhalilNo ratings yet
- Eserv PHPDocument30 pagesEserv PHPRahul M SNo ratings yet
- A Transient Manufactured Solution For The Compressible Navier-Stokes Equations With A Power Law ViscosityDocument16 pagesA Transient Manufactured Solution For The Compressible Navier-Stokes Equations With A Power Law ViscosityRhysUNo ratings yet
- Reliable Nonlinear Parameter Estimation in VLE ModelingDocument36 pagesReliable Nonlinear Parameter Estimation in VLE Modelingharish dassNo ratings yet
- CILAMCE2015 Renatha PDFDocument15 pagesCILAMCE2015 Renatha PDFMarcos Huber MendesNo ratings yet
- NomogramDocument17 pagesNomogramangel.paternina423No ratings yet
- Computational Dynamics in Design Optimization: Vanderplaats Research & Development, Inc., Colorado Springs, CO 80906Document9 pagesComputational Dynamics in Design Optimization: Vanderplaats Research & Development, Inc., Colorado Springs, CO 80906booshscrbdNo ratings yet
- Stuart 81Document25 pagesStuart 81Sebastian CulquiNo ratings yet
- Theory For Penalised Spline Regression: Peter - Hall@anu - Edu.auDocument14 pagesTheory For Penalised Spline Regression: Peter - Hall@anu - Edu.auAnn FeeNo ratings yet
- 1 s2.0 S0378375806002205 MainDocument10 pages1 s2.0 S0378375806002205 Mainjps.mathematicsNo ratings yet
- Reliability Based Structural Design: Ton VrouwenvelderDocument9 pagesReliability Based Structural Design: Ton VrouwenvelderFlávio LasmarNo ratings yet
- Framework For Particle Swarm Optimization With Surrogate FunctionsDocument11 pagesFramework For Particle Swarm Optimization With Surrogate FunctionsLucas GallindoNo ratings yet
- Understanding Response Surfaces: Central Composite Designs Box-Behnken DesignsDocument3 pagesUnderstanding Response Surfaces: Central Composite Designs Box-Behnken DesignsMonir SamirNo ratings yet
- Computational Statistics and Data Analysis: Stelios D. Georgiou, Stella Stylianou, Manohar AggarwalDocument10 pagesComputational Statistics and Data Analysis: Stelios D. Georgiou, Stella Stylianou, Manohar Aggarwal-No ratings yet
- European Journal of Operational Research: Tsan Sheng NGDocument11 pagesEuropean Journal of Operational Research: Tsan Sheng NGVieriu AlexandraNo ratings yet
- A 99 Line Topology Optimization Code Written in MatlabDocument8 pagesA 99 Line Topology Optimization Code Written in MatlabOmar Eladel MahmoudNo ratings yet
- Constraints and AI PlanningDocument29 pagesConstraints and AI PlanningMahmoud NabilNo ratings yet
- 1306 2365Document44 pages1306 2365muralidharanNo ratings yet
- Fuzzy Multiobjective Optimization of Mechanical StructuresDocument13 pagesFuzzy Multiobjective Optimization of Mechanical StructuresJoe LuisNo ratings yet
- Heteroscedasticity IssueDocument3 pagesHeteroscedasticity IssueShadman Sakib100% (2)
- A Response Surface Approach To Tolerance Design: Statistica Neerlandica (2006) Vol. 60, Nr. 3, Pp. 379-395Document17 pagesA Response Surface Approach To Tolerance Design: Statistica Neerlandica (2006) Vol. 60, Nr. 3, Pp. 379-395tarcisioNo ratings yet
- Approximation Models in Optimization Functions: Alan D Iaz Manr IquezDocument25 pagesApproximation Models in Optimization Functions: Alan D Iaz Manr IquezAlan DíazNo ratings yet
- Two Approaches For Improving The Dual Response Method in Robust Parameter DesignDocument15 pagesTwo Approaches For Improving The Dual Response Method in Robust Parameter DesignNestor ChavezNo ratings yet
- A Genetic-Based Framework For Solving (Multi-Criteria) Weighted Matching ProblemsDocument25 pagesA Genetic-Based Framework For Solving (Multi-Criteria) Weighted Matching ProblemsCESARPINEDANo ratings yet
- Robust Nonlinear Model Predictive Control With Reduction of Uncertainty Via Robust Optimal Experiment DesignDocument6 pagesRobust Nonlinear Model Predictive Control With Reduction of Uncertainty Via Robust Optimal Experiment DesignMarcelo LucasNo ratings yet
- Uncertainty Assessment For Reconstructions Based On Deformable GeometryDocument7 pagesUncertainty Assessment For Reconstructions Based On Deformable GeometryLata DeshmukhNo ratings yet
- V1.3: A Toolbox For Geostatistical Modelling in Python: GstoolsDocument33 pagesV1.3: A Toolbox For Geostatistical Modelling in Python: GstoolsThyago OliveiraNo ratings yet
- V1.3: A Toolbox For Geostatistical Modelling in Python: GstoolsDocument33 pagesV1.3: A Toolbox For Geostatistical Modelling in Python: GstoolsThyago OliveiraNo ratings yet
- Overdispersion Models and EstimationDocument20 pagesOverdispersion Models and EstimationJohann Sebastian ClaveriaNo ratings yet
- Ruhr-Universit at Bochum: 1998, Vol. 26, No. 2, 778-800Document23 pagesRuhr-Universit at Bochum: 1998, Vol. 26, No. 2, 778-800Yam CrackerNo ratings yet
- Answers Review Questions EconometricsDocument59 pagesAnswers Review Questions EconometricsZX Lee84% (25)
- Approximation of The Likelihood Function in The Bayesian Technique For The Solution of Inverse ProblemsDocument17 pagesApproximation of The Likelihood Function in The Bayesian Technique For The Solution of Inverse ProblemsDiego LopesNo ratings yet
- Multi-Objective Compared To Single-Objective Optimization With Application To Model Validation and Uncertainty QuantificationDocument10 pagesMulti-Objective Compared To Single-Objective Optimization With Application To Model Validation and Uncertainty QuantificationHeni AgustianiNo ratings yet
- Does Model-Free Forecasting Really Outperform The True Model?Document5 pagesDoes Model-Free Forecasting Really Outperform The True Model?Peer TerNo ratings yet
- Pak J. Statist. 2003 Vol. 19 (2) PP 213 - 226 Customer Satisfaction Measurement Models: Generalised Maximum Entropy ApproachDocument15 pagesPak J. Statist. 2003 Vol. 19 (2) PP 213 - 226 Customer Satisfaction Measurement Models: Generalised Maximum Entropy ApproachHang LeNo ratings yet
- 2002 An Extension of Banerjee and Rahim's Model For EconomicDocument11 pages2002 An Extension of Banerjee and Rahim's Model For EconomicsreeshpsNo ratings yet
- COMSOL Conf CardiffDocument8 pagesCOMSOL Conf CardiffLexin LiNo ratings yet
- Parametric Cost Deployment Dean NasaDocument8 pagesParametric Cost Deployment Dean Nasamosros123No ratings yet
- A Linear Programming Approach To Solving Stochastic Dynamic ProgramsDocument39 pagesA Linear Programming Approach To Solving Stochastic Dynamic ProgramskcvaraNo ratings yet
- Robust Optimization With Simulated AnnealingDocument13 pagesRobust Optimization With Simulated Annealingjihanemanar72No ratings yet
- The Desirability Package: Max Kuhn January 16, 2014Document17 pagesThe Desirability Package: Max Kuhn January 16, 2014Mario HarrisNo ratings yet
- A Comparison of Deterministic and Probabilistic Optimization Algorithms For Nonsmooth Simulation-Based OptimizationDocument11 pagesA Comparison of Deterministic and Probabilistic Optimization Algorithms For Nonsmooth Simulation-Based Optimizationtamann2004No ratings yet
- SPE-172432-MS Guidelines For Uncertainty Assessment Using Reservoir Simulation Models For Green-And Brown-Field SituationsDocument15 pagesSPE-172432-MS Guidelines For Uncertainty Assessment Using Reservoir Simulation Models For Green-And Brown-Field SituationsDuc Nguyen HoangNo ratings yet
- Business Administration-QmDocument14 pagesBusiness Administration-QmGOUTAM CHATTERJEENo ratings yet
- Alkylation 2Document22 pagesAlkylation 2aysar JarullahNo ratings yet
- GARCH Parameter Estimation Using High-Frequency DataDocument31 pagesGARCH Parameter Estimation Using High-Frequency DataArizar777No ratings yet
- Business Administration-QmDocument14 pagesBusiness Administration-QmGOUTAM CHATTERJEENo ratings yet
- Anatomy Inverse ProblemsDocument305 pagesAnatomy Inverse ProblemsseismNo ratings yet
- Applied Mathematical Modelling: M. Hadizadeh, S. YazdaniDocument9 pagesApplied Mathematical Modelling: M. Hadizadeh, S. YazdaniHo Nhat NamNo ratings yet
- Integer Optimization and its Computation in Emergency ManagementFrom EverandInteger Optimization and its Computation in Emergency ManagementNo ratings yet
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodFrom EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodNo ratings yet
- 1 CGMP Meeting d1s2 Quality-Overview Iser v3Document57 pages1 CGMP Meeting d1s2 Quality-Overview Iser v3Roberto TorrezNo ratings yet
- Testing Uniformity: Sampling Plans in Pharmacopeias For Weight, Volume, and Content UniformityDocument6 pagesTesting Uniformity: Sampling Plans in Pharmacopeias For Weight, Volume, and Content UniformityRoberto TorrezNo ratings yet
- 222L S11 Experiment 2 - Spectrophotometric IronDocument8 pages222L S11 Experiment 2 - Spectrophotometric IronRoberto TorrezNo ratings yet
- Estabilidad de MedicamentosDocument34 pagesEstabilidad de MedicamentosRoberto TorrezNo ratings yet
- VK 7000 7010 Op Man 70-9003 Rev JDocument83 pagesVK 7000 7010 Op Man 70-9003 Rev JRoberto TorrezNo ratings yet
- Validation of Chromatographic Methods of AnalysisDocument17 pagesValidation of Chromatographic Methods of AnalysisRoberto TorrezNo ratings yet
- Using Fast FormulaDocument92 pagesUsing Fast FormulaRohit Singh100% (1)
- Distributed Operating SystemDocument57 pagesDistributed Operating SystemSAI RAMANNo ratings yet
- Semester Exam System ErdDocument7 pagesSemester Exam System ErdrilfiunNo ratings yet
- 4 Breakout, Technical Analysis ScannerDocument4 pages4 Breakout, Technical Analysis ScannerDeepak KansalNo ratings yet
- Huawei E3272S-153 Quick Strat Guide (01, En)Document3 pagesHuawei E3272S-153 Quick Strat Guide (01, En)Nick MullerNo ratings yet
- A Review On BIM-based Automated Code Compliance Checking SystemDocument1 pageA Review On BIM-based Automated Code Compliance Checking SystemAsad AhmedNo ratings yet
- Iwc DumpDocument1,017 pagesIwc DumpPeterson MaranhoNo ratings yet
- Logic Made Easy WarringDocument58 pagesLogic Made Easy WarringVladimir MisataNo ratings yet
- MIL Final ExamDocument3 pagesMIL Final ExamImie Omamalin Guisehan100% (8)
- Exam Student HSC 90 Percen Le Student Download Old Data Candidate ListDocument1 pageExam Student HSC 90 Percen Le Student Download Old Data Candidate ListKrishnaVyasNo ratings yet
- PHD Thesis Big DataDocument7 pagesPHD Thesis Big Datacarolynostwaltbillings100% (2)
- BAPI EnhancementDocument6 pagesBAPI EnhancementSathish B SathishNo ratings yet
- Digital Platforms PI4 - Planning IntroductionDocument40 pagesDigital Platforms PI4 - Planning IntroductionMANUEL ANTONIO AVALOS ROSASNo ratings yet
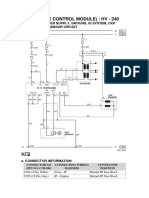
- Diagramas AveoDocument21 pagesDiagramas AveoAdrian PeñaNo ratings yet
- Design of High-Speed 16 To 4 Priority Encoder Using GDI: Ii. CmosDocument5 pagesDesign of High-Speed 16 To 4 Priority Encoder Using GDI: Ii. CmosناصرھرەNo ratings yet
- XML Reports With Screen Shots Jainullabuddin BDocument71 pagesXML Reports With Screen Shots Jainullabuddin BJainullabuddinNo ratings yet
- OS Unit-2-NotesDocument50 pagesOS Unit-2-NotesSai someoneNo ratings yet
- John Willhoite Resume 2010Document2 pagesJohn Willhoite Resume 2010jwillhoiteNo ratings yet
- HPGL2-RTL ReferenceGuide 5961-3526 540pages Sep96Document540 pagesHPGL2-RTL ReferenceGuide 5961-3526 540pages Sep96pappu khanNo ratings yet
- Project Report Delivery Drones 1Document53 pagesProject Report Delivery Drones 1Barkat Ahmad Toula100% (1)
- VB Chapter 9Document47 pagesVB Chapter 9KybeleNo ratings yet
- Android Enterprise Security Paper 2023Document70 pagesAndroid Enterprise Security Paper 2023caroco8182No ratings yet
- Management PricipalDocument7 pagesManagement PricipalmdivyalakshmiNo ratings yet
- Linux Fundamentals by Rajib ChowdhuryDocument111 pagesLinux Fundamentals by Rajib ChowdhuryRajib Chowdhury100% (5)
- Business Analytics and Big Data OutlineDocument4 pagesBusiness Analytics and Big Data OutlineCream FamilyNo ratings yet
- Emc Vnxe Series: EssentialsDocument4 pagesEmc Vnxe Series: Essentialsvijayen123No ratings yet
- Product Quick Guide July-December 2022 - CCTV Project Products - PreviewDocument252 pagesProduct Quick Guide July-December 2022 - CCTV Project Products - PreviewTuot BietNo ratings yet
- Account Statement From 1 May 2023 To 31 May 2023: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument10 pagesAccount Statement From 1 May 2023 To 31 May 2023: TXN Date Value Date Description Ref No./Cheque No. Debit Credit Balanceavinashdeshmukh7027No ratings yet
- Workshop 4 (B) - Algos For Humans Dev Gill Marex Spectron - Original.1550055327Document7 pagesWorkshop 4 (B) - Algos For Humans Dev Gill Marex Spectron - Original.1550055327iljanNo ratings yet