You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- A 0.18 M CMOS DDCCII For Portable LV-LP Filters: Vincenzo STORNELLI, Giuseppe FERRIDocument6 pagesA 0.18 M CMOS DDCCII For Portable LV-LP Filters: Vincenzo STORNELLI, Giuseppe FERRIHamid BoualiNo ratings yet
- Compactsecondgene CCIIDocument6 pagesCompactsecondgene CCIIHamid BoualiNo ratings yet
- A Compact Second Generation Current Conveyor (CCII) : Conference PaperDocument6 pagesA Compact Second Generation Current Conveyor (CCII) : Conference PaperHamid BoualiNo ratings yet
- A High Efficiency Boost Converter For TFT-LCD Bias SupplyDocument4 pagesA High Efficiency Boost Converter For TFT-LCD Bias SupplyHamid BoualiNo ratings yet
- Design of A Total-Dose Radiation Hardened Monolithic CMOS DC-DC Boost ConverterDocument6 pagesDesign of A Total-Dose Radiation Hardened Monolithic CMOS DC-DC Boost ConverterHamid BoualiNo ratings yet
- Switched-Capaci T 6 - D C Converter Inrush Current and LowDocument7 pagesSwitched-Capaci T 6 - D C Converter Inrush Current and LowHamid BoualiNo ratings yet
- Parallel-Connected Converters With Maximum Power Tracking: Kasemsan Siri and Kenneth A. ConnerDocument7 pagesParallel-Connected Converters With Maximum Power Tracking: Kasemsan Siri and Kenneth A. ConnerHamid BoualiNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Protection#2Document40 pagesProtection#2Yousef ElsayedNo ratings yet
- Protective Relaying and TestingDocument19 pagesProtective Relaying and Testingsherub wangdiNo ratings yet
- DC GeneratorDocument16 pagesDC GeneratorSiddique MuhammadNo ratings yet
- Rule Book - Atp - Alternative Transient Program: RB-02A-39 PDFDocument12 pagesRule Book - Atp - Alternative Transient Program: RB-02A-39 PDFvainateyagoldarNo ratings yet
- Frequency Inverter Theory - MitsubishiDocument73 pagesFrequency Inverter Theory - MitsubishiCarlos Eduardo Mariano JuniorNo ratings yet
- 800MW TG O&M Manual YeramarusDocument321 pages800MW TG O&M Manual YeramarusArvind Shukla100% (5)
- 1 s2.0 S0967066122002246 MainDocument15 pages1 s2.0 S0967066122002246 MainMohammed Saci ChabaniNo ratings yet
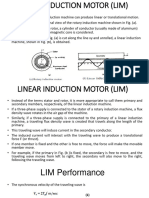
- Linear Induction Motor (Lim)Document13 pagesLinear Induction Motor (Lim)biswanathnathNo ratings yet
- Power: Manufacturers of AC Generators Upto 250MVADocument11 pagesPower: Manufacturers of AC Generators Upto 250MVAsanjeetkarNo ratings yet
- Paper - 2 Electrical EngineeringDocument24 pagesPaper - 2 Electrical EngineeringPudeti RaghusreenivasNo ratings yet
- Vehicle BLDC PTVTDocument87 pagesVehicle BLDC PTVTBộ Môn DieuKhienhocNo ratings yet
- Stepper Motors Catalog en-US RevADocument146 pagesStepper Motors Catalog en-US RevAYazeed MomaniNo ratings yet
- Electrical Motors - Frame Sizes PDFDocument5 pagesElectrical Motors - Frame Sizes PDFGustavo CuatzoNo ratings yet
- Electrical Fudamental Quiz 3Document18 pagesElectrical Fudamental Quiz 3Ahyad Arif Abdul Rahman100% (2)
- Hysteresis Motor: Working Principle & ApplicationsDocument6 pagesHysteresis Motor: Working Principle & ApplicationsSourav KumarNo ratings yet
- B2-13f Electrical Student ResourcesDocument162 pagesB2-13f Electrical Student ResourcesAlexander Mcfarlane75% (4)
- Semi Automated Paddy ThresherDocument26 pagesSemi Automated Paddy Thresherksati311No ratings yet
- Maglev Paper PresentationDocument12 pagesMaglev Paper Presentationaditya_kumar_me100% (1)
- Permanent and Temporary Magnetic GeneratorDocument2 pagesPermanent and Temporary Magnetic GeneratorIJEID :: www.ijeid.com100% (1)
- Low Voltage Switchgear and Control Gear Application GuideDocument152 pagesLow Voltage Switchgear and Control Gear Application GuidesahebraoNo ratings yet
- 2 - Forms of Lift - ESP MethodologyDocument78 pages2 - Forms of Lift - ESP MethodologyMartin UdanNo ratings yet
- LaserTechnology Mobility E-Drive Hairpin Edrive Production Solutions Brochure ENDocument24 pagesLaserTechnology Mobility E-Drive Hairpin Edrive Production Solutions Brochure ENalich500No ratings yet
- Research Paper On DC Motor ControlDocument8 pagesResearch Paper On DC Motor Controlfvgjcq6aNo ratings yet
- Episode 416 - Generators and Transformers - 0Document31 pagesEpisode 416 - Generators and Transformers - 0ibrahim fadelNo ratings yet
- Design of Semi Automatic Seed Sowing MachineDocument53 pagesDesign of Semi Automatic Seed Sowing MachineMuralianandh SubramanianNo ratings yet
- Parameter Estimation of Three Phase Induction Motor An Innovative Approach Thesis PDFDocument58 pagesParameter Estimation of Three Phase Induction Motor An Innovative Approach Thesis PDFAmit BhargavaNo ratings yet
- Electrical Machine I-3140913Document44 pagesElectrical Machine I-3140913Patel KashyapNo ratings yet
- Electrical Handbook by KreatryxDocument309 pagesElectrical Handbook by KreatryxAjay TiwariNo ratings yet
- Lec. (7) - Generator ProtectionDocument64 pagesLec. (7) - Generator ProtectionSalmi Nour E'ddineNo ratings yet
- Chapter 4 Synchonous MachinesDocument57 pagesChapter 4 Synchonous Machinesquocdung NguyenNo ratings yet