You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Fraction Animal ClassDocument3 pagesFraction Animal ClassVinay GuptaNo ratings yet
- Comparitive Study Cav ModelsDocument10 pagesComparitive Study Cav ModelsVinay GuptaNo ratings yet
- Neptune LSIDocument18 pagesNeptune LSIVinay GuptaNo ratings yet
- Physics and Control of Cavitation: Jean-Pierre FRANCDocument36 pagesPhysics and Control of Cavitation: Jean-Pierre FRANCSahr EmmanuelNo ratings yet
- Oblique Wave Experimental REsultsDocument7 pagesOblique Wave Experimental REsultsVinay GuptaNo ratings yet
- Chap4 Waves BasicsDocument33 pagesChap4 Waves BasicsVinay GuptaNo ratings yet
- Fractions GuideDocument57 pagesFractions GuideNightwing10No ratings yet
- Lam MasterTechWiskDocument55 pagesLam MasterTechWiskVinay GuptaNo ratings yet
- Flow Past A Sphere Ch3Document48 pagesFlow Past A Sphere Ch3mheinricNo ratings yet
- A Mass-Conserving Level-Set Method For Modelling of Multi-Phase OwsDocument23 pagesA Mass-Conserving Level-Set Method For Modelling of Multi-Phase OwsVinay GuptaNo ratings yet
- Pij 03 SVDocument33 pagesPij 03 SVVinay GuptaNo ratings yet
- A Mass-Conserving Level-Set Method For Modelling of Multi-Phase OwsDocument23 pagesA Mass-Conserving Level-Set Method For Modelling of Multi-Phase OwsVinay GuptaNo ratings yet
- Introduction in Ship Hydromechanics: Lecture MT519 Draft EditionDocument107 pagesIntroduction in Ship Hydromechanics: Lecture MT519 Draft EditionflouzanNo ratings yet
- Meland Afmc 16 07Document4 pagesMeland Afmc 16 07Vinay GuptaNo ratings yet
- PDF Iihr444Document43 pagesPDF Iihr444Vinay GuptaNo ratings yet
- Seepage and Thermal Effects in Porous MediaDocument6 pagesSeepage and Thermal Effects in Porous MediaVinay GuptaNo ratings yet
- On The Second OrderDocument24 pagesOn The Second OrderVinay GuptaNo ratings yet
- 1 Flow MechDocument20 pages1 Flow MechVinay GuptaNo ratings yet
- Pipe Flow1Document48 pagesPipe Flow1Vinay GuptaNo ratings yet
- EulerDocument25 pagesEulerPejman Edalat100% (1)
- Chapter 8 Viscous Flow in Pipes: Objective: To Design A Piping System Æ How To Estimate The Pump SizeDocument39 pagesChapter 8 Viscous Flow in Pipes: Objective: To Design A Piping System Æ How To Estimate The Pump SizeVinay Gupta100% (1)
- 04 CLSFNDocument32 pages04 CLSFNAatresh KarnamNo ratings yet
- 13 - Fluids at Rest and Piped FluidsDocument7 pages13 - Fluids at Rest and Piped FluidsVinay GuptaNo ratings yet
- ITK-233-2 - PVT Behavior of FluidDocument57 pagesITK-233-2 - PVT Behavior of FluidVinay GuptaNo ratings yet
- Handout EqnsDocument4 pagesHandout EqnsNaga SeshuNo ratings yet
- Lecturenotes1 11Document13 pagesLecturenotes1 11Vinay GuptaNo ratings yet
- Water in The Atmosphere: ATS 351 - Lecture 5Document33 pagesWater in The Atmosphere: ATS 351 - Lecture 5Vinay Gupta100% (1)
- Lecture 4Document12 pagesLecture 4Vinay GuptaNo ratings yet
- Test-Case Number 13: Shock Tubes (PA)Document10 pagesTest-Case Number 13: Shock Tubes (PA)Vinay GuptaNo ratings yet
- Free Surface InstabilityDocument12 pagesFree Surface InstabilityVinay GuptaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Radioss For Linear Dynamics 10.0Document79 pagesRadioss For Linear Dynamics 10.0Venkat AnumulaNo ratings yet
- CollectionsDocument42 pagesCollectionsNaveen KumarNo ratings yet
- HP Mini 210-2120br PC Broadcom Wireless LAN Driver v.5.60.350.23 Pour Windows 7 Download GrátisDocument5 pagesHP Mini 210-2120br PC Broadcom Wireless LAN Driver v.5.60.350.23 Pour Windows 7 Download GrátisFernandoDiasNo ratings yet
- Investigating The Determinants of Internet Banking Adoption in GreeceDocument10 pagesInvestigating The Determinants of Internet Banking Adoption in GreeceEman MostafaNo ratings yet
- Hetron CR 197Document3 pagesHetron CR 197Faidhi SobriNo ratings yet
- Web Bearing and Buck1ling To BS en 1993Document3 pagesWeb Bearing and Buck1ling To BS en 1993antoninoNo ratings yet
- HCMA ZW370 6 Brochure - 02 - 22Document24 pagesHCMA ZW370 6 Brochure - 02 - 22Carlos Arturo AcevedoNo ratings yet
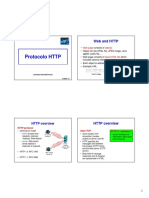
- HTTP ProtocolDocument16 pagesHTTP ProtocolHao NguyenNo ratings yet
- Cognizant Company FAQDocument4 pagesCognizant Company FAQManojChowdary100% (1)
- ET275 Unit 2 - Lesson Plan - SlidesDocument27 pagesET275 Unit 2 - Lesson Plan - SlidesDonald LeedyNo ratings yet
- The Soyuzist JournalDocument15 pagesThe Soyuzist Journalcatatonical thingsNo ratings yet
- Ps 6013 Geometric Dimensioning and Tolerancing Symbology Method, Usage and Definitions 2013-08-01 (G)Document18 pagesPs 6013 Geometric Dimensioning and Tolerancing Symbology Method, Usage and Definitions 2013-08-01 (G)maheshmbelgaviNo ratings yet
- 2010 LeftySpeed Oms en 0Document29 pages2010 LeftySpeed Oms en 0Discord ShadowNo ratings yet
- Logcat 1676535419488Document174 pagesLogcat 1676535419488Mungkin SayaNo ratings yet
- Spark - Eastern Peripheral Road Project (Epr) Weekly Quality MeetingDocument6 pagesSpark - Eastern Peripheral Road Project (Epr) Weekly Quality Meetingengr.s.a.malik6424No ratings yet
- WFP Situation Report On Fire in The Rohingya Refugee Camp (23.03.2021)Document2 pagesWFP Situation Report On Fire in The Rohingya Refugee Camp (23.03.2021)Wahyu RamdhanNo ratings yet
- Template For Public BiddingDocument3 pagesTemplate For Public BiddingFederico DomingoNo ratings yet
- Final Lpd1Document6 pagesFinal Lpd1MONIC STRAISAND DIPARINENo ratings yet
- Questionnaire Exercise: Deals Desk Analyst Please Answer Below Questions and Email Your Responses Before First Technical Round of InterviewDocument2 pagesQuestionnaire Exercise: Deals Desk Analyst Please Answer Below Questions and Email Your Responses Before First Technical Round of InterviewAbhinav SahaniNo ratings yet
- PROCEMAC PT Spare Parts ManualDocument27 pagesPROCEMAC PT Spare Parts ManualMauricio CruzNo ratings yet
- The Green Wall - Story and Photos by Stephen James Independent Investigative Journalism & Photography - VC Reporter - Ventura County Weekly - California Department of Corrections whistleblower D.J. Vodicka and his litigation against the CDC.Document8 pagesThe Green Wall - Story and Photos by Stephen James Independent Investigative Journalism & Photography - VC Reporter - Ventura County Weekly - California Department of Corrections whistleblower D.J. Vodicka and his litigation against the CDC.Stephen James - Independent Investigative Journalism & PhotographyNo ratings yet
- Thesis-Android-Based Health-Care Management System: July 2016Document66 pagesThesis-Android-Based Health-Care Management System: July 2016Noor Md GolamNo ratings yet
- Zambia Urban Housing Sector ProfileDocument205 pagesZambia Urban Housing Sector ProfileJosephine ChirwaNo ratings yet
- Moon Chae-Won - AsianWiki - 1606832167285Document6 pagesMoon Chae-Won - AsianWiki - 1606832167285CESHNo ratings yet
- DL5/DL6 With CBD6S: User ManualDocument32 pagesDL5/DL6 With CBD6S: User ManualMeOminGNo ratings yet
- Data Structures and Algorithms Made Easy-Narasimha KarumanchiDocument228 pagesData Structures and Algorithms Made Easy-Narasimha KarumanchiPadmalatha Ragu85% (40)
- 2012 Brochure Keltan Final en PDFDocument20 pages2012 Brochure Keltan Final en PDFJorge Zegarra100% (1)
- Sfa 5.22 PDFDocument36 pagesSfa 5.22 PDFLuis Evangelista Moura PachecoNo ratings yet
- Australian Car Mechanic - June 2016Document76 pagesAustralian Car Mechanic - June 2016Mohammad Faraz AkhterNo ratings yet
- Super Duty - Build & PriceDocument8 pagesSuper Duty - Build & PriceTyler DanceNo ratings yet