You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- EVTV Pierburg CWA-50 Coolant Pump Specs and TestingDocument3 pagesEVTV Pierburg CWA-50 Coolant Pump Specs and TestingHarold TheHelicopter100% (4)
- 800 KVA Transformer SpecificationsDocument3 pages800 KVA Transformer SpecificationsRavi Bapodra100% (1)
- Utilization of Recycled and Waste Materials in Various Construction ApplicationsDocument22 pagesUtilization of Recycled and Waste Materials in Various Construction Applicationsguddu9100% (1)
- DriverDocument29 pagesDriverguddu9No ratings yet
- GSM CodeDocument12 pagesGSM Codeguddu9No ratings yet
- Metro TrainDocument24 pagesMetro Trainguddu9No ratings yet
- Abstract ARMDocument1 pageAbstract ARMguddu9No ratings yet
- Moeller Sasy 60iDocument50 pagesMoeller Sasy 60iOscar TorresNo ratings yet
- PMMCDocument16 pagesPMMCRavi Shankar 31No ratings yet
- 12W10PDocument2 pages12W10PFernando RovilaNo ratings yet
- High Sensitivity and Fast Response Fiber TipDocument8 pagesHigh Sensitivity and Fast Response Fiber Tipdogukan gunerNo ratings yet
- Fundamentals of Electroanalytical ChemistryDocument19 pagesFundamentals of Electroanalytical ChemistryAmida OaxacaNo ratings yet
- IL410, IL4108 Optocoupler Spec SheetDocument9 pagesIL410, IL4108 Optocoupler Spec Sheetvivek0630No ratings yet
- Manual Smith V3.10Document75 pagesManual Smith V3.10Dreiker UtreraNo ratings yet
- XR-A550 XR-A330: Stereo CD Cassette Deck ReceiverDocument82 pagesXR-A550 XR-A330: Stereo CD Cassette Deck ReceiverAlexandre S. CorrêaNo ratings yet
- Method Statement For Battery ChargerDocument6 pagesMethod Statement For Battery ChargerUtku Can Kılıç100% (1)
- EE202L Half and Full-wave RectifiersDocument12 pagesEE202L Half and Full-wave RectifiersM usman UsmanNo ratings yet
- Test Report Format - NSK5Document5 pagesTest Report Format - NSK5Rsp SrinivasNo ratings yet
- Electronic Devices Lab - Exp - 7 - Student - Manual (Summer 18-19)Document4 pagesElectronic Devices Lab - Exp - 7 - Student - Manual (Summer 18-19)MD MONIM ISLAMNo ratings yet
- SMK0825FDocument8 pagesSMK0825FfernandoNo ratings yet
- 3+2 Multiphase PWM Regulator For Intel Imvp8™ Desktop Cpus: DatasheetDocument2 pages3+2 Multiphase PWM Regulator For Intel Imvp8™ Desktop Cpus: DatasheetTomy Aditya PratamaNo ratings yet
- Surface Review & LettersDocument12 pagesSurface Review & LettersSujoy ChakrabortyNo ratings yet
- Power System Fault Analysis in 40 CharactersDocument147 pagesPower System Fault Analysis in 40 CharactersSyafrizal Syafrizal100% (1)
- Unbonded Strain GaugeDocument9 pagesUnbonded Strain GaugesjojijuNo ratings yet
- MLX90380 - Triaxis® Resolver: 1. Features and Benefits 2. Application ExamplesDocument29 pagesMLX90380 - Triaxis® Resolver: 1. Features and Benefits 2. Application Examplesdany weinfeldNo ratings yet
- 0.3.1 Analog Design Relies On Ab-StractionDocument15 pages0.3.1 Analog Design Relies On Ab-StractionbikirangNo ratings yet
- Power System Protection (Vol 3 - Application) 2nd Ed (IEEE, 1995) WWDocument479 pagesPower System Protection (Vol 3 - Application) 2nd Ed (IEEE, 1995) WWJamile_P_N100% (8)
- Wiring Manual: MeagleDocument97 pagesWiring Manual: MeagleUdham100% (3)
- Battery Energy Storage System ModelingDocument14 pagesBattery Energy Storage System ModelingMark CsenkiNo ratings yet
- Price ListDocument44 pagesPrice ListenggduNo ratings yet
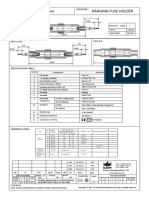
- Hanging fuse holder product detailsDocument1 pageHanging fuse holder product detailsbemlNo ratings yet
- BT-620 BIOSENSORS QUIZ ANSWERSDocument3 pagesBT-620 BIOSENSORS QUIZ ANSWERSRajNo ratings yet
- 6: Electricity 2 - Topic Questions Paper 3: Year Series Paper NumberDocument8 pages6: Electricity 2 - Topic Questions Paper 3: Year Series Paper NumberrobinsonNo ratings yet
- 1953-Schonfeld-Analogy of Hydraulic, Mechanical, Acoustic and Electric SystemsDocument34 pages1953-Schonfeld-Analogy of Hydraulic, Mechanical, Acoustic and Electric SystemsAndres PalacioNo ratings yet
- Passive and Active Battery Balancing Comparison Based On MATLAB SimulationDocument7 pagesPassive and Active Battery Balancing Comparison Based On MATLAB SimulationNhật NguyễnNo ratings yet