You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Induction MotorDocument24 pagesInduction MotorAMAMA KHANNo ratings yet
- Single Phase Induction MotorDocument13 pagesSingle Phase Induction MotorEdmondNo ratings yet
- Stepper Motors 1Document4 pagesStepper Motors 1ngt881No ratings yet
- 3 Hours / 70 Marks: Seat NoDocument4 pages3 Hours / 70 Marks: Seat Nosourabh patil100% (1)
- Presented by MD - Saad-Ul-Haque B.SC in Eee, BuetDocument9 pagesPresented by MD - Saad-Ul-Haque B.SC in Eee, BuetShafiqul IslamNo ratings yet
- Detailed Flowchart For Design of DC Machines - Part-1 - FlowchartsDocument40 pagesDetailed Flowchart For Design of DC Machines - Part-1 - FlowchartsN. T. DadlaniNo ratings yet
- DbkjsnbkaDocument76 pagesDbkjsnbkasreelakshmisnrNo ratings yet
- DC Motors Advantages and Disadvantages Over AC MotorsDocument9 pagesDC Motors Advantages and Disadvantages Over AC MotorsAnonymous 22VivgHlNo ratings yet
- English M13 Table Fan and Desert Cooler - Day 4Document22 pagesEnglish M13 Table Fan and Desert Cooler - Day 4john powerNo ratings yet
- 50kw To 5000kw Low RPM Three Phase AcDocument11 pages50kw To 5000kw Low RPM Three Phase AcashagrieNo ratings yet
- EE311 Electric Drives Control For Automation PDFDocument2 pagesEE311 Electric Drives Control For Automation PDFAmalNo ratings yet
- BEE Notes - Induction MotorsDocument9 pagesBEE Notes - Induction MotorsNishit ParmarNo ratings yet
- Wind Turbines Fault Ride-Through Capability-林堉仁Document1 pageWind Turbines Fault Ride-Through Capability-林堉仁Atef MohamedNo ratings yet
- Electrical Machinery - Fitzgerald-427-428Document2 pagesElectrical Machinery - Fitzgerald-427-428Marvin LiraNo ratings yet
- Mod-2 BDocument17 pagesMod-2 BMukul RanaNo ratings yet
- Single Phase Induction MotorDocument32 pagesSingle Phase Induction MotorDeep PatelNo ratings yet
- EE8401 Electrical Machines - II AUQP Merged 21.11.19Document31 pagesEE8401 Electrical Machines - II AUQP Merged 21.11.19sivaNo ratings yet
- Double Cage Induction MotorDocument6 pagesDouble Cage Induction MotorGFGHJHKNo ratings yet
- Final Year ProjectDocument52 pagesFinal Year ProjectMohamed A. HusseinNo ratings yet
- Three-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWDocument26 pagesThree-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWCarlos Roberto Amaya Rodriguez100% (1)
- Application of A.C Motor in Industrial EOT CranesDocument20 pagesApplication of A.C Motor in Industrial EOT CranesBalaki SrikanthNo ratings yet
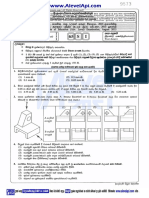
- 2015 Al Engineering Technology Part I MCQ Paper Sinhala Medium Alevelapi PDFDocument8 pages2015 Al Engineering Technology Part I MCQ Paper Sinhala Medium Alevelapi PDFKaveen SanudaNo ratings yet
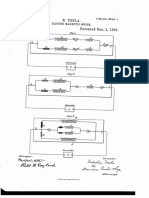
- Tesla Patent 416191Document4 pagesTesla Patent 416191andy1144552No ratings yet
- SEEX1016 L T P Credits Total Marks 3 0 0 3 100: (Common To EEE and E&C)Document132 pagesSEEX1016 L T P Credits Total Marks 3 0 0 3 100: (Common To EEE and E&C)Suman MajumderNo ratings yet
- Design of A Low Cost Thruster For An Autonomous Underwater VehicleDocument6 pagesDesign of A Low Cost Thruster For An Autonomous Underwater VehiclefuadNo ratings yet
- Armature Windings 2Document22 pagesArmature Windings 2Ero RosalNo ratings yet
- Lecture 1 - Construction of Synchronous GeneratorDocument11 pagesLecture 1 - Construction of Synchronous GeneratorNdapewelao MbwaleNo ratings yet
- 04 - Arranque de MotoresDocument13 pages04 - Arranque de MotoresJadu QuinoNo ratings yet
- SSD Syllabus Ee8601Document2 pagesSSD Syllabus Ee8601venki4youNo ratings yet
- The Primitive MachinesDocument2 pagesThe Primitive MachinesWaqas Pervaiz89% (9)