Professional Documents
Culture Documents
AUTOMATIZACION
Uploaded by
Jonth JiCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
AUTOMATIZACION
Uploaded by
Jonth JiCopyright:
Available Formats
INTRODUCCIN A
LA
AUTOMATIZACIN
DR. ALVARO AGUINAGA BARRAGN
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
1
1. INTRODUCCIN A LA AUTOMATIZACIN INDUSTRIAL:
1.1 Sistema.
Es un conjunto de elementos que interactan para cumplir unos objetivos
determinados.
Fig. No. 1.1 Sistema Fsico
1.2 Control de un sistema.
Consiste en actuar sobre un sistema para que este cumpla con sus objetivos.
1.3 Componentes de un sistema de control.
El control en si mismo es un sistema fsico y por lo tanto se define como un
conjunto de elementos que interactan con el fin de posibilitar que un sistema
cumpla con sus objetivos. Para evitar confusiones con los sistemas que
controla, simplemente se lo llama Control.
Los componentes principales del control son:
SENSORES: Son dispositivos que establecen, detectan o sensan
parmetros de los sistemas fsicos y envan esta informacin a un
controlador.
CONTROLADOR: Es el cerebro que adems de almacenar informacin,
recibe informacin de los sensores, procesa informacin y enva rdenes a
los actuadores para que accionen sobre el sistema en vista a lograr que
este logre sus objetivos.
ACTUADORES: Son dispositivos que reciben las rdenes por parte del
controlador y accionan o actan sobre un sistema para controlarlo.
LQUIDO
ENTRANDO MEZCLADOR
LQUIDO
SALIENDO
VAPOR
VALVULA
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
2
Estos componentes de un sistema de control pueden tener tecnologas muy
diversas: mecnica, electromecnica, electrnica, etc.
Dependiendo del tipo de sujeto, el control se clasifica en:
CONTROL MANUAL: Cuando un operador humano es el que efecta el
control sobre el sistema.
CONTROL AUTOMTICO: Cuando no interviene un operador humano,
sino son elementos artificiales los que efectan el control.
CONTROL SEMIAUTOMTICO: Cuando parte del proceso de control es
automtico y otra parte es manual.
1.4 Planteamiento de un sistema fsico para el control.
La condicin necesaria para que el control de un sistema fsico cumpla con su
finalidad es que este sistema funcione correctamente. Para el control los
componentes del sistema fsico se consideran dentro de una "caja negra y
ms bien se considera al sistema en forma paramtrica, siendo los parmetros
funcionales del sistema, desde el punto de vista de control los siguientes:
Fig. No. 1.2 Planteamiento de un Sistema Fsico para Control
SALIDAS: Son parmetros cuantificables que representan los objetivos de
un sistema.
ENTRADAS: Son parmetros cuantificables sobre los que se puede actuar
directamente.
PERTURBACIONES: Son parmetros generalmente del medio ambiente
en que funciona el sistema y que son muy difciles o imposible de evitarlos.
Estos parmetros se consideran perturbaciones solamente cuando estos
afectan significativamente en el funcionamiento de un sistema.
SISTEMA
FSICO
SALIDAS ENTRADAS
PERTURBACIONES
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
3
Para cuantificar estos parmetros se pueden usar valores discretos (entre los
ms importantes estn: ON/OFF; ENCENDDO/APAGADO; 0/1, etc.) o tambin
rangos de valores sean discretos o continuos.
1.5 Control de lazo abierto.
Este tipo de control se da para aquellos sistemas simples, que no tienen
perturbaciones y en los que, por tanto, no es necesario comprobar si
efectivamente se cumplen los valores de las salidas.
Este tipo de control se define en el siguiente esquema:
Las seales de referencia son la informacin inicial que se enva al controlador
y que indican cuales son los valores de salida del sistema que se requieren.
1.6 Control de lazo cerrado o retroalimentado.
Este tipo de control se define en el siguiente esquema:
ACTUADORES
SENSORES
DE
REFERENCIA
SEALES DE
REFERENCIA
CONTROL
ORDENES
SISTEMA
ENTRADAS SALIDAS
SENSORES
DE RETRO-
ALIMENTAC.
ACTUADORES
SENSORES
DE
REFERENCIA
SEALES DE
REFERENCIA
CONTROL
ORDENES
SISTEMA
ENTRADAS SALIDAS
PERTURBACIONES
Fig. 1.6: Sistema de control abierto
Fig. 1.7: Sistema de control retroalimentado
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
4
Este tipo de control se utiliza para aquellos sistemas que tienen perturbaciones
y en los que es necesario comprobar (prueba error) si se estn cumpliendo
los valores de las salidas deseadas.
Los sensores de retroalimentacin detectan los valores de las salidas del
sistema y envan esta informacin al controlador en que se comparan estos
valores con los de referencia y se corrigen de forma secuencial los errores
hasta que convergan a los valores buscados.
1.7 Control secuencial.
Este tipo de control establece una secuencia de ejecucin de procesos o
eventos. Esta secuencia puede ser cclica o no. Por ejemplo: un semforo, el
arranque de un quemador de fuel oil, un dosificador de lquidos, el arranque de
un motor elctrico trifsico, etc.
1.8 Control de variables.
Este tipo de control tiene como finalidad de que los parmetros de salida de un
sistema fsico convergan a los valores deseados y de referencia. Por ejemplo:
la temperatura de un horno, la presin de un cilindro neumtico, la presin de
una unidad de generacin de vapor, etc. En el control de variables se pueden
reconocer las siguientes definiciones:
PARAMETRO
TIEMPO DE RESPUESTA
ERROR
REFERENCIA
Fig. 1.8: Control de variables
TIEMPO
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
5
Cuando el sistema converge con el tiempo al valor de referencia y se mantiene
cercano a este valor, se define el sistema como "estable.
Hay casos en que el sistema no converge o luego de haberse acercado,
nuevamente se aleja ( a veces cclicamente), en cuyo caso se dice que el
sistema es "inestable y por tanto el control falla.
Cuando la referencia es una funcin del tiempo (curva), el control debe seguir
permanentemente el proceso de convergencia a la curva de referencia.
1.9 Seales digitales y analgicas.
Las seales de informacin transmitidas entre los diferentes componentes y
elementos de un sistema de control se dividen en dos tipos que son:
SEALES ANALGICAS: Son seales continuas fsicas de la naturaleza.
SEALES DIGITALES: Son seales discretas o discontinuas que se
encuentran codificadas.
Dependiendo de cual de estas seales o informacin es la predominante en un
elemento, equipo o sistema de control a este se lo define como analgico o
digital.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
6
PLC
Programa de
control
Salidas hacia
dispositivos
Entradas desde
dispositivos
Fig. No. 2.1: Controlador Lgico Programable
2 CONTROLADORES LGICOS PROGRAMABLES PLCS:
2.1 Introduccin.
Un controlador lgico programable (PLC, por sus siglas en ingls) se define
como un dispositivo electrnico digital que usa una memoria programable para
guardar instrucciones y llevar a cabo funciones lgicas, de configuracin de
secuencia, de sincronizacin, de conteo y aritmticas, para el control de
maquinaria y procesos.
Este tipo de procesadores se denomina lgico debido a que su programacin
bsicamente tiene que ver con la ejecucin de operaciones lgicas y de
conmutacin. Los dispositivos de entrada (por ejemplo, un interruptor) y los
dispositivos de salida (por ejemplo, un motor), que estn bajo control, se
conectan al PLC; de esta manera el controlador monitorea las entradas y
salidas, de acuerdo con el programa diseado por el operador para el PLC y
que ste conserva en memoria, y de esta manera se controlan mquinas o
procesos. En un principio, el propsito de estos controladores fue sustituir la
conexin fsica de relevadores de los sistemas de control lgicos y de sin-
cronizacin. Los PLCs tienen la gran ventaja de que permiten modificar un
sistema de control sin tener que volver a alambrar las conexiones de los
dispositivos de entrada y de salida; basta con que el operador digite en un
teclado las instrucciones correspondientes. Lo anterior permite contar con un
sistema flexible mediante el cual es posible controlar sistemas muy diversos
entre s, tanto en tipo como en complejidad.
Si bien los PLCs son similares a las computadoras, tienen caractersticas
especficas que permiten su empleo como controladores. stas son:
1. Son robustos y estn diseados para resistir vibraciones, temperatura,
humedad y ruido.
2. La interfaz para las entradas y las salidas est dentro del controlador.
3. Es muy fcil programarlos, as como entender el lenguaje de programacin.
La programacin bsicamente consiste en operaciones de lgica y
conmutacin.
Los primeros PLC fueron concebidos en 1968. Hoy da su empleo est muy
generalizado, habiendo una gran variedad de ellos, desde pequeas unidades
autnomas que cuentan quizs con 20 entradas y salidas, hasta sistemas
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
7
modulares para manejar cantidades de entradas/salidas, manejar
entradas/salidas digitales y analgicas y llevar a cabo modos de control PD.
Los controladores elctricos y programables se pueden dividir de acuerdo a su
funcionalidad.
Fig. No. 2.2 Posicionamiento de controladores elctricos y programables
Tambin se pueden clasificar los controladores lgicos programables de
acuerdo con la complejidad de sus aplicaciones.
Fig. No. 2.3 Gama de PLCs industriales
Compleja
s
TSX
Nano
TSX Micro
T TS SX X P Pr re em mi iu um m
A
p
l
i
c
a
c
i
o
n
e
s
Simple
s N
E/S
46 300 2000
S7-
200
S7-300
S7-400
Precio
Micro PLC
MduIo Lgico
Temporizador
Contactor
FuncionaIidad
PLC
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
8
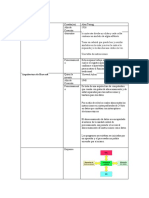
2.2 Estructura Bsica.
En forma general los componentes bsicos de un PLC se pueden observar en
la siguiente figura:
Fig. No. 2.4 Partes principales de un PLC
La CPU S7-200 es un aparato autnomo compacto que incorpora una unidad
central de procesamiento (CPU), la fuente de alimentacin, as como entradas
y salidas digitales.
La CPU ejecuta el programa y almacena los datos para la tarea de
automatizacin o el proceso.
La fuente de alimentacin proporciona corriente a la unidad central y a los
mdulos de ampliacin conectados.
Las entradas y salidas controlan el sistema de automatizacin. Las
entradas vigilan las seales de los aparatos de campo (por ejemplo
sensores e interruptores) y las salidas vigilan las bombas, motores u otros
dispositivos del proceso.
La interface de comunicacin permite conectar la CPU a una unidad de
programacin o a otros dispositivos. Algunas CPUs disponen de dos o ms
interfaces de comunicacin.
Los diodos luminosos indican el modo de operacin de la CPU (RUN o
STOP), el estado de las entradas y salidas integradas, as como los
posibles fallos del sistema que se hayan detectado.
Si desea conectar utilizar un PC como unidad de programacin del PLC, se
debe disponer de equipos adicionales para lograr la comunicacin como por
Conexin para
VoItaje de aIimentacin
Modo de
Funcionamiento
Indicacin de Estado de
Ias ED/SD integradas
OpcionaI
MduIo
EEPROM
Potencimetro
AnaIgico
Para eI ajuste
manuaI de
variabIes, p. ej.
cambio deI offset,
vaIores Imites,
ajuste de
vaIores , etc.
EEPROM; 8 K
Word
Memoria no
voItiI
Interfase
PPI
RUN
STOP
0.1
0.2
0.3
0.4
0.5
1.1
1.2
1.3
1.4
1.5
Entradas
Q0.1
Q0.2
Q0.3
Q0.4
Q0.5
Q 1.1
0 1
Ranura para
Cartucho EEPROM
Mando
Run/Stop/Term
Potencimetro
AnaIgico
SaIidas
CPU
214
Es utiIizada para
Ia transferencia
de programas
sin programador
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
9
ejemplo: un cable PC/PP, un procesador de comunicaciones (CP) y un cable
de interface multipunto (MP), una tarjeta de interface multipunto (MP).
Fig. No. 2.5 comunicacin PC con un PLC
La estructura interna bsica de un PLC en esencia consta de una unidad
central de procesamiento (CPU), memoria y circuitos de entrada/salida. La
CPU controla y procesa todas las operaciones dentro del PLC. Cuenta con un
temporizador cuya frecuencia tpica es entre 1 y 8 MHz. Esta frecuencia
determina la velocidad de operacin del PLC y es la fuente de temporizacin y
sincronizacin de todos los elementos del sistema de bus se lleva informacin y
datos desde y hacia al memoria y las unidades de entrada/salida. Los
elementos de la memoria son: una ROM para guardar en forma permanente la
informacin del sistema operativo y datos corregidos; una RAM para el
programa del usuario y memoria buffer temporal para los canales de
entrada/salida, como se puede ver en la siguiente figura:
Fig. No. 2.6 Estructura interna de un PLC
Tablero de
programacin
Bus de direccin
Bus de control
Bateria
RAM para el
programa
del usuario
CPU Reloj ROM del
sistema
RAM para
datos
Unidad de
entrada /
salida
Bus de datos
Bus del sistema de E/S
Buffer
Opto-
acoplador
Registros
nterfaz para
controlador
Controladores Canales de entrada
Canales de salida
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
10
Con lo que la arquitectura de un autmata programable se puede describir
tambin en el siguiente esquema:
Fig. No. 2.7 Arquitectura tpica de un autmata programable
El usuario puede modificar los programas en la RAM. Sin embargo, para evitar
que estos programas se pierdan durante una interrupcin del suministro de
energa elctrica, en el PLC se utiliza una batera, para mantener el contenido
de la RAM por determinado tiempo. Una vez elaborado un programa y
guardado en la RAM, ste se puede cargar en un chip de memoria EPROM y
de esta manera queda guardado de manera permanente. Las especificaciones
de PLC pequeos con frecuencia indican la capacidad de la memoria del
programa en funcin de la cantidad de pasos de programa que en dicha
memoria es posible guardar. Un paso de programa es la instruccin que lleva
a cabo determinado evento. El programa usado para la realizacin de una
tarea consta de varios pasos; por ejemplo: verificar el estado del interruptor A
y del interruptor B; si A y B estn cerrados, entonces da energa al solenoide
P, lo que a su vez opera un actuador. Cuando concluye lo anterior, puede
iniciar otra tarea. Por lo general, un PLC pequeo puede manejar de 300 a
1000 pasos, ms que suficiente para la mayora de las aplicaciones de control.
Las tareas sugeridas para realizar la automatizacin del control de un sistema
se resumen en las siguientes:
Estructurar el proceso en secciones independientes entre si.
Describir las funciones de cada proceso, para ello tome en cuenta lo
siguiente:
Entradas y salidas
Describir el funcionamiento
Condiciones que deben cumplirse para la operacin de los
actuadores (electrovlvulas, motores, accionamientos, etc.).
Describir la interface del operador.
Fuente de
alimenta-
cin
Mdulo
Entradas
Digitales
Mdulo
Salidas
Digitales
Mdulo
E/S
analgicas
Mdulo
CPU
220-230
VAC
24VDC
5VDC
Sensores
digitales
(interruptores,
sensores de prox.)
Actuadores
digitales
(vlvulas neumticas,
lmparas indicadoras.)
Sensores analgicos
(Termopares,
potencimetros)
Actuadores analgicos
(Variadores de velocidad)
Mdulo
Especiales
(contaje,
comunica-
ciones,
PD ...
Conexin a otros controladores
o con E/S remotas
Conectores
al bus para
ms mdulos
de E/S
Unidad de
programacin
supervisin
Bu
s
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
11
Disear los circuitos de seguridad para la instalacin de los cables de
interconexin. En este caso es necesario considerar condiciones de
operacin normal y de falla, tanto en condiciones de cortocircuito,
sobrecarga o sobrevoltaje, tomando en cuenta la seguridad del equipo y del
personal que operar el sistema.
Distribuir adecuadamente las estaciones de control del operador,
considerando la disposicin mecnica de los CPU's, de los mdulos de
ampliacin y lgicamente de los equipos que se controlarn.
Elaborar una lista de nombres asociados a as entradas, salidas y de todos
los elementos que intervienen en el sistema.
El PLC opera en forma cclica, realizando las siguientes tareas:
Lee las entradas.
Ejecuta el programa del usuario.
Procesa las peticiones de comunicacin.
Efecta el autodiagnstico.
Escribe las salidas.
El ciclo de operaciones de la CPU se aprecia en la siguiente figura:
Fig. No. 2.8 Ciclo de operacin de un PLC
Al principio de cada ciclo se leen los valores actuales de las entradas digitales y
se escriben luego en la imagen del proceso de las entradas. El programa
almacenado en la CPU utiliza dichas entradas para evaluar la lgica.
El ingreso de las entradas analgicas se realiza directamente desde el
programa del usuario.
La ejecucin del programa se realiza en forma ordenada y secuencial desde la
primera hasta la ltima operacin. Durante esta etapa la CPU actualiza los
datos.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
12
El control directo de las entradas y salidas permite acceder directamente a las
mismas mientras se ejecuta el programa o una rutina de interrupcin.
La siguiente fase del ciclo consiste en procesar los mensajes recibidos por la
interface de comunicacin.
Mientras se est ejecutando el programa la CPU comprueba el firmware, la
memoria del programa y el estado de los mdulos de ampliacin.
Al final de cada ciclo se escriben los valores de la imagen del proceso de las
salidas en las salidas digitales.
Debe aclararse que las interrupciones y sus rutinas asociadas se almacenan
como parte del programa, por lo que no se ejecutan como parte del ciclo, sino
slo cuando ocurre el evento, segn su prioridad.
Es recomendable utilizar la imagen del proceso, en lugar de acceder
directamente a las entradas y salidas durante la ejecucin del programa, por
las siguientes razones:
Por estabilidad del proceso, ya que se sincronizan los valores de las
entradas que fueron verificadas al comienzo del ciclo, de tal manera que la
imagen actualiza las salidas al terminar la ejecucin del programa.
Para acelerar el tiempo de ejecucin, ya que es ms rpido acceder a la
imagen que a las entradas y salida fsicas.
Por flexibilidad, por cuanto la imagen del proceso permite acceder a las
entradas y salidas en formato de bits, bytes, palabras y palabras dobles.
La unidad de entrada/salida es la interfaz entre el sistema y el mundo externo.
Para introducir programas en esta unidad se usa un tablero, el cual puede
variar de una sencilla configuracin de teclado con pantalla de cristal lquido, o
bien llegar a tener incluso unidades de presentacin visual (VDU por sus siglas
en ingls) con teclado y pantalla. Tambin es posible introducir los programas
al sistema mediante un enlace con una computadora personal (PC por sus si-
glas en ingls), el cual se carga con un paquete de software apropiado.
La CPU dispone de reas de memoria para que todos los datos se puedan
procesar de forma ms rpida Y eficiente.
La descripcin que se efectuar a continuacin corresponde a los PLC's
Siemens de la familia SMATC S7-200.
La CPU almacena el estado de las entradas y salidas en determinadas reas
de la memoria. A cada rea de la memoria se ha asignado un identificador
nemotcnico, por ejemplo:
para las entradas.
Q para las salidas.
V para las variables
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
13
Para acceder a las reas de memoria se especifican direcciones absolutas, las
que se indican de las siguientes formas:
a. Bit de datos en la memoria de la CPU, lo que se denomina
Direccionamiento ''byte. bif', en este caso la direccin se especifica como
operando. Por ejemplo, para los PLC's SMATC ST-200 con CPU 214:
Entradas 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
10.0 10.1 10.2 10.3 10.4 10.5 10.6 10.7
Salidas Q0.0 Q0.1 Q0.2 Q0.3 Q0.4 Q0.5 Q0.6 Q0.7
Q10.0 Q10.1
El significado de la direccin absoluta: 2. 3, es el siguiente:
Primera letra () = identificador de rea (entrada)
Primer nmero (2) = direccin del byte
Segundo nmero (3) = bit del byte, nmero de bit. 3 de 8 (0 a 7)
Las memorias de entradas y salidas digitales se pueden representar como
matrices con 8 columnas y mltiples filas, a las que se accede por bits.
0 1 2 3 4 5 6 7
0
1
2
3
4
5
6
7
8
9
10
11
12
13
En !as siguientes tablas se dan ejemplos de direccionamiento directo en el
formato de bit.
FORMATO AREA DRECCON
BYTE BT
10.1 Entrada 0 1
Q1.1 Salida 1 1
V0.1 Variable 10 1
M26.7 Marca 26 7
S3.1 Rel secuencia 3 1
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
14
FORMATO AREA NUMERO
T24 Temporizador 24
C20 Contador 20
ACO Acumulador 0
HC1 Contador rpido 1
b. Formato de byte, palabra o palabra doble, esto implica asignar nombres
simblicos. Para este formato se identifican las diversas reas de memoria
de la CPU, as por ejemplo:
V memoria de variables entradas
salidas
Q marcas
M marcas especiales
S rels de control secuencial
T temporizadores
C contadores
A entradas analgicas
AQ salidas analgicas
AC acumuladores
HC contadores rpidos
En este caso la direccin absoluta incluye el identificador de rea (por ejemplo
V) y el tamao (basta 4 bytes o 32 bits) de los datos a los que se desea
acceder. El tamao puede identificarse como:
B (byte)
W (palabra = 2 bytes)
D (palabra doble = 4 bytes)
Las memorias indicadas se pueden representar como matrices con 8 columnas
y mltiples filas, a las que se accede por byte, palabra o doble palabra.
0 1 2 3 4 5 6 7
0
1
2
3
4
5
6
7
8
9
10
11
12
13
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
15
La direccin absoluta incluye tambin un valor numrico: bien sea el nmero de
bytes desde el comienzo del rea de memoria o bien el nmero del elemento.
Los siguientes ejemplos corresponden a la misma direccin en formatos de
byte, palabra y palabra doble.
V B 100, el identificador corresponde al rea de memoria variable (V), en
formato de byte (B) cuya direccin es 100.
V W 100, el identificador corresponde al rea de memoria variable (V), en
formato de palabra (W) cuya direccin es 100.
VD 100, el identificador corresponde al rea de memoria variable (V), en
formato de palabra doble (D) cuya direccin es 100.
En las siguientes tablas se dan ejemplos de direccionamiento directo en el
formato de byte, palabra, palabra doble.
FORMATO AREA TAMAO DIRECCIN
BYTE INCIAL
B4 Entrada Byte 4
QB5 Salida Byte 5
VW100 Variable Palabra 100
MD20 Marca Palabra doble 20
SB4 Rel control
secuencial
Byte 4
SMB86 Marca especial Byte 86
FORMATO AREA TAMANO DIRECCION BYTE
INICIAL
AW4 Entrada analgica Palabra 4
AQW4 Salida analgica Palabra 4
Los programas del controlador, con sus respectivos datos, se almacenan de las
siguientes maneras:
En una memoria EEPROM, no voltil. para almacenar todo el programa, as
como algunas reas de datos y a la configuracin de la CPU.
En una memoria RAM.
Cuando el programa se carga desde el PC (ordenador) hacia la CPU el
programa de usuario, la configuracin de la CPU y el bloque de datos (DB) se
almacenan en la memoria RAM Y en la EEPROM.
Los canales de entrada/salida proporcionan funciones para el
acondicionamiento y aislamiento de seales, lo que permite conectarlos
directamente a sensores y actuadores, sin necesidad de otros circuitos. La
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
16
Entrada
PLC
Diodo de
proteccin
Optoacoplador
Seal
para la
CPU
Circuito divisor
de voltaje
Fig. No.2.9: Canal de entrada
figura 3 muestra la configuracin bsica de un canal de entrada. Los voltajes
comunes para las seales de entrada son 5V y 24V.
Los voltajes comunes para las seales de salida son 24 V y 240 V. La
especificacin del tipo de las salidas generalmente es tipo relevador, tipo
transistor o tipo triac. En el tipo relevador (figura 4), la seal de la salida del
PLC se utiliza para operar un relevador; as, ste es capaz de conmutar
corrientes del orden de unos pocos amperes en un circuito externo. El
relevador asla al PLC del circuito externo, y se emplea tanto para la
conmutacin de cd como la de ca. Sin embargo, los relevadores funcionan con
relativa lentitud.
En la salida tipo transistor se utiliza un transistor para conmutar corriente a
travs de un circuito externo. El transistor realiza la conmutacin con mayor
rapidez. Los optoaisladores se emplean con transistores de conmutacin para
lograr el aislamiento entre los circuitos externos y el PLC. La salida tipo
transistor slo se utiliza en la conmutacin de cd. Las salidas tipo triac se usan
para controlar cargas externas que se conectan a la fuente de alimentacin de
ca. En este caso tambin se emplean optoaisladores.
SALDA
PLC
RELEVADOR
Fig. No. 2.10: Salida tipo relevador
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
17
El tiempo de respuesta del PLC considera el tiempo necesario hasta la salida
de la seal, dejando de lado la consideracin del tiempo que toman los
actuadores para realizar lo mandado por la seal. Esto es muy importante y no
se debe olvidar a la hora de determinar el tiempo de respuesta requerido para
nuestro PLC. Desde el punto de vista del PLC existe una divisin de las
acciones que consumen tiempo:
Entrada: Esta accin necesita el tiempo que se invierte en revisar el estado de
las entradas. El PLC puede realizar una accin a la vez, y el revisar una
entrada constituye una, de esta forma para revisar el estado de todas las
entradas se tiene una cantidad de tiempo considerable. El PLC toma el estado
de la entrada y la guarda en un registro de memoria que se puede acceder
desde el programa.
Ejecucin: Es la accin que consume el tiempo que transcurre durante la
ejecucin de las rutinas programadas en el PLC. Aqu se procesa la
informacin del estado de las entradas y se toma decisiones de acuerdo a la
lgica programada. Depende del nmero de lneas de programa, lo que a su
vez depende de la eficiencia de las lgicas ingresadas al equipo.
Salida: Durante esta accin se traspasan los estados de los registros de
memoria reservados para la salida de nuestra rutina lgica a cada una de las
salidas fsicas de nuestro equipo. En este caso el tiempo transcurrido es mayor
mientras ms salidas se tenga que actualizar, que casi siempre corresponde a
actualizar todas las salidas, an las no modificadas.
De este modo el tiempo de respuesta total de nuestro PLC corresponde a la
suma de los tiempos de entrada, de ejecucin y salida.
2.3 Entradas/Salidas Digitales.
Entradas digitaIes
Los mdulos de entradas digitales permiten conectar al autmata sensores de
tipo todo o nada. El cable de seal del sensor se conecta a una va de entrada
Optoacoplador
Fusible
Salida
Fig. No. 2.11: Salida tipo transistor
PLC
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
18
del mdulo. El mdulo se encarga de convertir la seal que entra por la va en
una seal que es cero o uno en un bit interno de la memoria del mdulo. Cada
ciclo de autmata, la unidad central lee los bits de los mdulos y vuelca su
valor en los objetos del lenguaje del autmata conocidos como entradas
digitales.
Los mdulos de entradas digitales trabajan con seales de tensin, por ejemplo
cuando por una va llegan 24 voltios se interpreta como un 1 y cuando llegan
cero voltios se interpreta como un O. Los mdulos de entradas digitales se
caracterizan por el nivel de tensin que interpretan como "uno". Los niveles de
tensin estndar son 24 voltios C.C., 110 VCA, 220 VCA.
Los mdulos de entradas digitales a 24 VCC son los ms comunes. Por qu
se utilizan 24 VCC y no un nivel de tensin ms bajo, como podra ser 5 VCC?
En una instalacin industrial hay que garantizar que la seal que da el sensor,
llegue al mdulo de entradas, el cable perfectamente puede medir 100 metros,
y no existe ninguna garanta de que los 5 voltios lleguen al mdulo de entradas.
En el cable adems pueden inducirse ruidos que den lugar a la aparicin de
voltajes que el autmata interpretar como que el sensor est activo. Es ms
difcil que esto suceda si se utilizan 24 voltios.
Tambin existen mdulos cuyos niveles de tensin son 110 VCA y 220 VCA.
Son niveles de tensin ms elevados, que "garantizan" la llegada de la seal
del sensor. Adems los sensores no necesitan fuente de alimentacin, ya que
con un simple transformador reductor basta.
En su contra, utilizan tensin alterna, la cual debe ser rectificada y comparada,
por lo que el proceso de adquisicin de la seal es ms lento que en tensin
continua. El nivel de tensin 220 debe ser considerado peligroso para el ser
humano y los sensores tendrn puntos a esta tensin. En la mquina existirn
puntos de tensin peligrosa. Son mdulos ms caros que los de 24 VCC. El
nmero de vas por mdulo es menor debido a que la electrnica de
tratamiento es ms complicada y ocupa ms sitio. Adems se debe tener en
cuenta que la oferta comercial de estos mdulos es mucho ms reducida.
En el proceso de adquisicin de la seal hay varias etapas. En la primera existe
una proteccin contra sobretensiones, si la seal es de corriente alterna se
rectifica. En la segunda etapa se produce un filtrado, para evitar los ruidos que
pueden entrar por el cable del sensor. En algunos mdulos es programable el
tiempo de filtrado (entre 0.1 y 12 ms). Un ruido que induzca en el cable del
sensor 24 voltios durante un tiempo inferior al filtrado, no ser interpretado
como "uno". Despus del filtrado se produce una puesta en forma de la onda y
un aislamiento galvnico o por optoacoplador. A continuacin la seal se
deposita como un "cero" o como un "uno" en un bit interno de la memoria del
mdulo.
Al existir el filtrado de la seal se impide que los ruidos "lleguen" al interior del
autmata. Pero tambin impide que estos mdulos se puedan utilizar para
cablear sensores que dan pulsos a alta frecuencia, como pueden ser los pulsos
de un encoder. Un filtrado de 10 ms indica que se podrn leer pulsos a una
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
19
frecuencia mxima de 50 Hz (50 pulsos por segundo). Para efectuar contajes
rpidos el autmata dispone de entradas de contaje rpido, que asociadas a
circuitos contadores rpidos pueden contar pulsos a altas frecuencias (hasta
500 KHz).
En algunos autmatas cada va de entrada digital ocupa tres bits. Uno para el
valor actual, otro para el valor anterior y otro para el valor de forzado. Con los
bits de valor actual y valor anterior el autmata puede reconocer flancos de
subida o bajada en la va de entrada digital. Con el bit de forzado se pueden
forzar desde el software de programacin el estado de las entradas, para por
ejemplo comprobar la evolucin del programa del autmata sin tener que tener
la mquina conectada.
En la Figura 2.12 se observa la configuracin de un mdulo de entradas
digitales de 32 vas de entrada y 32 vas de salida. En la imagen aparecen las
16 primeras entradas. El tiempo de filtrado es programable cada cuatro vas.
Fig. 2.12 Configuracin de un mdulo de entras y salidas digitales
Las cuatro primeras vas tienen configuracin especial, pueden ser entradas
normales, entradas de almacenamiento del estado 0, entradas de
almacenamiento del estado 1, o tratamiento de eventos con el flanco de subida
o bajada. Tambin las cuatro primeras vas pueden ser entradas de Contaje
rpido a una frecuencia mxima de 500 Hz.
SaIidas digitaIes
Un mdulo de salidas digitales permite al autmata programable actuar sobre
los preactuadores y actuadores que admitan rdenes del tipo todo o nada.
Peridicamente el autmata escribe el valor de los objetos conocidos en su
lenguaje como salidas digitales en estos mdulos.
El valor binario de las salidas digitales (0 1) se convierte en la apertura o
cierre de un contacto rel interno del autmata en el caso de mdulos de
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
20
salidas a rel. O bien se convierte en la presencia de 0 24 voltios en un
tomillo del bornero del mdulo, en los mdulos de salidas estticos.
En los mdulos estticos el elemento que conmuta es un componente
electrnico como transistores o triacs, y en los mdulos electromecnicos son
contactos de rels internos al mdulo.
Los mdulos de salida digitales a base de transistores o triacs suministran
tensin cuando la va de salida esta activa. Los niveles de tensin estndar son
24 VCC y 110 VCA. La potencia que suministran las vas de salida es limitada.
Los mdulos de salidas electromecnicos disponen de rels internos que al
activar la salida conmutan su contacto. Este contacto une elctricamente dos
tomillos del bornero de conexin del autmata. Las salidas a rel son libres de
tensin. La tensin debe provenir de una fuente de alimentacin externa al
autmata y conectarse al comn del contacto del rel, el otro tornillo del
contacto se cablear al elemento que deseemos activar con esta salida.
Aunque las salidas a rel sean libres de tensin se procurar no sobrepasar la
intensidad mxima que soporta el contacto del rel. De lo contrario el contacto
podra soldarse, de manera que la salida permanecera activa aunque por
programa estuviera desactivada.
Los mdulos de salidas estticos al suministrar tensin, slo pueden actuar
sobre elementos que trabajen todos a la misma tensin, en cambio los mdulos
de salidas electromecnicos, al ser libres de tensin, pueden actuar sobre
elementos que trabajen a tensiones distintas. Los mdulos estticos a 24 VCC
permiten una mayor densidad de vas por mdulo y son menos costosos que
los electromecnicos. Pero tienen la desventaja de que exteriormente al
mdulo muchas veces hay que efectuar una activacin en cascada mediante
un rel para poder actuar sobre el actuador.
Proteccin de Ios mduIos de SaIidas digitaIes.
Cuando una falla, por ejemplo un cortocircuito, tiene como consecuencia la
disyuncin de una salida, sta puede reactivarse si no persiste ninguna falla en
sus lmites. El comando de reactivacin se define en la configuracin. La
reactivacin puede ser automtica o controlada por el programa.
Automtico
El mdulo ejecuta la re activacin en periodos de 10 segundos hasta que
desaparezca la falla.
Programado
El programa de aplicacin ejecuta la reactivacin. Para evitar las
reactivaciones repetidas, el mdulo asegura automticamente una
temporizacin de 10 segundos entre dos reactivaciones.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
21
La reactivacin no tiene ningn efecto en una va no activada o que contiene
una falla.
Si el programa de autmata se detiene y pasa a estado de STOP, por falla del
procesador, o por fallo en algn mdulo de entradas salidas, las salidas pueden
ponerse en un estado no perjudicial para la aplicacin. Est estado, llamado
posicin de retorno, se define para cada mdulo en la configuracin de salidas.
La configuracin permite seleccionar:
Retorno
Las vas se ponen a O 1 en funcin del valor de retorno configurado.
Conservacin
Las salidas permanecen en el estado anterior a STOP.
2.4 Entradas/Salidas Analgicas.
Los mdulos de entradas salidas analgicas permiten que los autmatas
programables trabajen con actuadores de mando analgico y lean seales de
tipo analgico. Estos mdulos son la interfaz para que el autmata pueda
controlar procesos continuos como son temperatura, presin, caudal...
Entradas anaIgicas
Los mdulos de entradas analgicas convierten una magnitud analgica en un
nmero que se deposita en una variable tipo palabra interna del autmata. Esta
conversin se realiza con una precisin o resolucin determinada (nmero de
bits) y cada cierto intervalo de tiempo (periodo de muestreo).
La precisin en los mdulos de entrada analgica suele ir desde los 12 a los 16
bits. A mayor nmero de bits ms precisa ser la conversin pero tambin ms
lenta. Una precisin de 14 bits es mucho ms que suficiente en la mayora de
las aplicaciones industriales.
La velocidad con que se toman muestras de la seal analgica, define el
periodo de muestreo. El periodo de muestreo, en las tarjetas de entrada
analgica de los autmatas, suele ir desde 25 msg a unos 30 segundos. Como
muy rpido se toman 40 muestras por segundo. Se debe considerar que los
autmatas se dedican a control industrial de variables lentas como son la
temperatura, y 40 muestras por segundo es mucho ms que suficiente para
controlar temperatura (y tambin para controlar velocidad).
En la Figura 2.13 se observa la configuracin de un mdulo de entradas/salidas
analgicas incorporado en la unidad central del autmata TSX Micro 3722. Este
mdulo dispone de 8 vas de entrada analgica y una va de salida analgica.
En cada va de entrada se puede configurar el rango y el filtro.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
22
Fig. 2.13 Configuracin de mdulo de entradas y salidas analgicas
El filtro elegido permite eliminar los ruidos, en este mdulo se puede elegir:
0 sin filtrar, periodo de muestreo de 32ms.
1 Filtrado dbil alpha=0.750 y un tiempo de respuesta de 111,23
milisegundos
2 Filtrado dbil alpha=0.875 y un tiempo de respuesta de 239,64
milisegundos
3 Filtrado medio alpha=0.937 y un tiempo de respuesta de 495,83
milisegundos
4 Filtrado medio alpha=0.969 y un tiempo de respuesta de 1,008
segundos
5 Filtrado fuerte alpha=.984 y un tiempo de respuesta de 2,032
segundos
Si se elige el 0, no existe filtrado de la seal analgica y el periodo de muestreo
es lo suficientemente bajo como para que el autmata pueda controlar
variables rpidas como son velocidad y par. Si la seal es muy ruidosa se debe
elegir un filtro alto, pero los tiempos de respuesta del filtro slo permitirn
controlar variables lentas como es la temperatura.
El rango permite ajustar la va al tipo de seal de entrada que da el sensor
analgico. Los rangos ms comunes de seal que ofrecen los sensores
analgicos son:
10 voltios
0-10 voltios
0-20 mA
4-20 mA
Los mdulos de entrada analgica pueden leer tensin o intensidad. Una gran
gama de sensores analgicos dan como seal de salida una seal en
intensidad. La razn es que es mucho ms difcil que su forma de onda se vea
alterada por ruidos o tensiones inducidas, que en el caso de que la seal sea
tensin. En el rango de 4-20 mA se puede detectar la rotura de hilo del cable
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
23
del sensor. Esto no se puede realizar en ningn otro rango. Pero tambin
existen sensores que no dan ni tensin ni intensidad, como pueden ser los
termopares o las Pt100. Estos sensores necesitan de una etapa electrnica de
tratamiento y adquisicin de la seal.
Existen mdulos que llevan incorporada la electrnica necesaria para el
tratamiento de la seal, evitando la necesidad de electrnica externa al
autmata para el tratamiento de la seal que dan los termopares o las
resistencias Pt100. Estos mdulos permiten conectar directamente termopares,
Pt100, Ni1000. El tratamiento de la seal del sensor se realiza internamente en
el mdulo, incluyendo tambin la compensacin de la soldadura fra en los
termopares.
En la Fig. 2.14 se observa la configuracin de un mdulo de 4 entradas
analgicas de 16 bits. El mdulo permite la conexin de diferentes sensores de
temperatura, realizndose la conversin, en el caso de que no exista filtrado,
en un tiempo mnimo de 520 ms. Si se configura un filtrado 5 el tiempo de
respuesta es de 33 segundos. Estos valores de tiempo tan altos son debidos a
que la seal debe ser tratada electrnicamente, debe ser filtrada, y a
continuacin convertida eh seal numrica con una precisin de 16 bits. Esta
precisin es muy alta, si el rango de entrada fuera de 0.10 voltios, el bit menos
significativo equivale a 102
16
= 0.000152 Voltios.
Fig. 2.14 Configuracin de un mdulo de 4 entradas analgicas
SaIidas anaIgicas
Los mdulos de salida analgica permiten que el valor de una variable
numrica interna del autmata se convierta en tensin o en intensidad. Esta
tensin o intensidad puede servir de referencia de mando para actuadores que
admitan mando analgico, como pueden ser los variadores de velocidad, las
etapas de tiristores de los hornos, reguladores de temperatura, reguladores de
caudal, etc., permitiendo al autmata realizar funciones de regulacin y control
de procesos continuos.
La precisin en los mdulos de salida analgica suele ir desde los 12 a los 14
bits (suele ser menor que la de los mdulos de entrada). No tienen problemas
de velocidad, dado que la conversin digital-analgica es prcticamente
instantnea.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
24
Cada salida se caracteriza por el tipo de seal suministrada que puede ser
intensidad o tensin y por el rango 0-10Voltios, 10Voltios, 0-20rnA, 4-20rnA.
En la Figura 2.15 se observa la configuracin de un mdulo de salidas
analgicas, el cual dispone de dos vas de salida. En el mdulo se puede
configurar, adems del rango, si las vas de salida analgica mantienen su
valor o se convierten en cero cuando el autmata detecta un fallo interno.
Fig. 2.15 Configuracin de mdulo de salidas analgicas
Proteccin de Ios mduIos de SaIidas AnaIgicas
Si el programa se detiene, las salidas analgicas deben ponerse en un estado
no perjudicial para la aplicacin. Este estado, llamado posicin de retorno, se
define para cada mdulo en la configuracin de las salidas. La configuracin
permite elegir:
Retorno de las salidas a un valor. O es el valor predeterminado.
Conservacin del estado: las salidas permanecen en el estado anterior
al Paro.
En muchas aplicaciones el valor de retorno es diferente de 0, entonces se
deber programar el valor adecuado. El valor de retorno depende del tipo de
salida utilizada:
0..10500 para 0-20mA.
500..10500 para4-20mA.
-10500..+10500 para 10V.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
25
3 PROGRAMACIN DE PLCS:
3.1 Software de los PLCs.
Los programas para los PLCs comprenden tres partes bsicas:
programa principal
subrutinas (opcional)
rutinas de interrupcin (opcional)
Estos tienen varios lenguajes de programacin de entre los cuales los mas
importantes son: KOP (esquema de contactos) y AWL (lista de instrucciones).
El programa principal contiene las operaciones que controlan la aplicacin, las
cuales se ejecutan en forma secuencial en cada ciclo. El programa principal
termina con una sentencia de finalizacin (Bobina absoluta en KOP o sentencia
MEND en AWL).
Una subrutina es una secuencia de operaciones que se ejecutan cada vez que
son invocadas en el programa principal. Esta o stas se colocan al final del
programa principal y terminan con una operacin de retorno absoluto (RET).
Las rutinas de interrupcin son secuencias de operaciones que se ejecutan
cada vez que se presenta el correspondiente evento de interrupcin. Esta o
stas se ubican al final del programa principal y terminan con una operacin de
retorno absoluto (RET).
En la siguiente figura se aprecia la ubicacin recomendada de estas partes del
programa.
Fig. No. 3.1 Partes de un programa para PLCs
Programa Principal
MEND
SBR 0 Subrutina (opcional)
RET
SBR n Subrutina (opcional)
RET
NT 0 Rutina de interrupcin (opcional)
RET
NT n Rutina de interrupcin (opcional)
RET
Programa de
usuario
Programa
Principal
Subrutina
(Se ejecuta si es
llamada por el
Programa
Principal)
Rutina de
interrupcin (se
ejecuta al producirse
el evento de
interrupcin
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
26
Los lenguajes de programacin ms utilizados para los PLCs son de dos
tipos:
AWL que comprende un juego de operaciones nemotcnicas que representan
las funciones de la CPU. Este lenguaje contiene una lista de instrucciones en el
que cada lnea del programa tiene una operacin que utiliza una abreviatura
nemotcnica para representar una funcin de la CPU. Las operaciones se
colocan en secuencia lgica de acuerdo a los requerimientos del programa.
La programacin con este tipo de lenguaje tiene las siguientes reglas:
Cada seccin de programacin se divide en segmentos, cuya palabra clave
es NETWORK.
Los comentarios se escriben luego de dos barras inclinadas (//). Cada lnea
adicional de comentario debe comenzar as mismo con dos barras
inclinadas. Finalice cada lnea con pulsando Enter.
La primera columna corresponde a la operacin. La operacin es una
sentencia lgica.
La segunda columna, que se separa de la anterior por un espacio en
blanco, corresponde al operando. El operando es la direccin del dato sobre
el que acta la operacin.
No introduzca espacios entre el rea de memoria y su direccin.
Los operandos se separan mediante comas, un espacio en blanco o un
tabulador.
Los nombres simblicos deben ir entre comillas.
En el siguiente cuadro se observa un ejemplo de un programa escrito en
lenguaje A WL.
// PROGRAMA PARA TREN TRANSPORTADOR
NETWORK
LD "marcha 1" // Marcha motor
AN "paro -Eml" // Si 0.0 esta activado (on)
= QO.0 // poner en marcha motor transportador
NETWORK
LD 0.1 // paro emergencia transportador
O 0.3 // Si paro_Em1 est activado
R Q0.0,1 // o si paro - Em2 est activado
NETWORK MEND
MEND // Fin de programa
KOP es un lenguaje de programacin grfico con componentes similares a los
elementos de los esquemas de circuitos, los cuales conforman un segmento de
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
27
operaciones lgicas. Los diagramas que se establecen son similares a grficos
en escalera (LADDER).
Los elementos bsicos de un lenguaje KOP son:
Contactos: que representan interruptores por los que circula la corriente
cuando est cerrado. Esto implica que hay dos tipos de contactos: cerrados
y abiertos.
Bobinas: que representan a rels que se excitan cuando se aplica voltaje.
Cuadros: que representan una funcin que se ejecuta cuando la corriente
circula por l. Un cuadro puede representar, por ejemplo, un contador, un
temporizador, etc.
Segmentos: que constituyen un circuito completo. La corriente circula desde
la barra de alimentacin ubicada a la izquierda pasando por los contactos
cerrados para excitar las bobinas o cuadros.
En el siguiente cuadro se da un ejemplo de un programa en lenguaje KOP.
Debe sealarse que un mismo programa puede ser escrito sea en lenguaje
KOP o en A WL.
Una vez escrito el programa el software permite compilado para revisar la
sintaxis lgica, de tal maneta que si existen errores stos tienen los mensajes
respectivos que permiten corregidos.
El software instalado en el ordenador permite cambiar automticamente el
programa escrito en KOP o A WL, al elegir el comando respectivo y realizar los
cambios de presentacin requeridos, como por ejemplo: operaciones y
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
28
direcciones escritos completamente en maysculas, tabuladores entre las
operaciones y las direcciones, entre otros.
Otra operacin importante es la creacin de un bloque de datos con el objeto
de predefinir e inicializar las variables utilizadas en el programa. Al efectuar
esta labor se puede especificar la columna de direccin, el valor de los datos y
los comentarios respectivos.
En los circuitos de control deben diferenciarse claramente el circuito de mando
o de control que tiene baja potencia e intensidad de corriente y el circuito de
fuerza o potencia que puede manejar alta potencia elctrica y altos valores de
intensidad de corriente o amperaje. Esto puede observarse en la siguiente
figura en que se tiene un control electromecnico sencillo para el arranque de
un motor monofsico de corriente alterna.
Fig. No. 3.2 Control electromecnico de un motor VAC
Para sistemas de control electromecnicos ms complejos, por ejemplo el
arranque de motores trifsicos en que se debe temporizadamente pasar de
una configuracin a otra (tringulo/estrella), se debe utilizar una serie de otros
componentes electromecnicos como son: contactores, temporizadores,
contadores, pulsadores, etc. Con estos elementos se puede dar la secuencia o
el "programa de control, para esto se utiliza tambin un esquema de
programacin Ladder. Sin embargo como se podr concluir, el uso de estos
sistemas de control implica un costo muy alto y una gran complejidad mientras
el sistema sea ms grande. Esta realidad ha determinado que en la actualidad
se defina el control electrnico como el que se impone en la automatizacin
industrial y los elementos de control electromecnico se utilizan como
actuadores para relacionar los circuitos de alta potencia y amperaje con el
Circuito de uItu potenciu
Circuito de
bugu potenciu
Interruptor
Contuctor
Fuente de corriente
continuu
Fuente de
corriente uIternu
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
29
circuito de control en que siempre existir baja potencia y bajo amperaje y en
que se encontrarn los PLCs.
La forma bsica de programacin ms comn en los PLC es la programacin
de escalera. sta especifica cada una de las tareas de un programa como si
fueran los peldaos de una escalera. En cada peldao se especifica, por
ejemplo, la revisin de los interruptores A y B (las entradas); si ambos estn
cerrados, se proporciona energa a un solenoide (la salida).
La secuencia que sigue un PLC para realizar un programa se resume de la
siguiente manera:
1. Explora las entradas asociadas a un peldao del programa de escalera.
2. Solucin de la operacin lgica de cada una de las entradas.
3. Encendido/apagado de las salidas del peldao.
4. Contina con el siguiente peldao y repite los pasos 1, 2, 3.
5. Contina con el siguiente peldao y repite los pasos 1,2 Y 3.
6. Contina con el siguiente peldao y repite los pasos 1,2 Y 3.
Y as sucesivamente, hasta finalizar el programa.
Los peldaos del programa tipo escalera se exploran de acuerdo con la
secuencia respectiva.
Existen dos mtodos para el procesamiento de entradas/salidas:
Por actualizacin continua
En este caso, la CPU explora los canales de entrada de acuerdo con la
secuencia del programa. Cada punto de entrada se revisa por separado y
se determina su efecto en el programa. Existe un retraso inherente, por lo
general de unos 3 ms, cuando se revisa cada una de las entradas, para
garantizar que el microprocesador slo lea seales de entrada vlidas. Este
retraso evita que el microprocesador cometa el error de contar una seal de
entrada dos o ms veces, si hay rebotes de contacto en el interruptor.
Antes de que el programa enve la instruccin para ejecutar una operacin
lgica y se produzca una salida, se exploran varias entradas, cada
exploracin con un retraso de 3 ms. Las salidas quedan retenidas, de
manera que su estado se mantiene hasta la siguiente actualizacin.
Por copiado masivo de entradas/salidas
Dado que con la actualizacin continua se produce un retraso de 3 ms por
cada entrada, el tiempo total para revisar cientos de puntos de
entrada/salida puede resultar muy prolongado. Para que el programa se
ejecute ms rpido, un rea especfica de la RAM se utiliza como memoria
intermedia o buffer, entre la unidad de lgica de control y la unidad de
entrada/salida. Cada entrada/salida tiene una direccin en esta memoria. Al
inicio de cada ciclo de programa, la CPU muestrea todas las entradas y
copia sus estados en las direcciones de entrada/salida de la RAM.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
30
Conforme se ejecuta el programa, se leen los datos de entrada guardados
en la RAM, segn se requiera y se ejecutan las operaciones lgicas
correspondientes. Las seales de salida as producidas se guardan en la
seccin reservada para entrada/salida en la RAM. Al trmino de un ciclo de
programa, las salidas se envan de la RAM a los canales de salida. Las
salidas quedan retenidas, de manera que su estatus queda guardado
hasta la siguiente actualizacin.
La programacin de un PLC mediante diagramas de escalera consiste en la
elaboracin de un programa de manera similar a como se dibuja un circuito de
contactos elctricos en el control electromecnico. El diagrama de escalera
consta de dos lneas verticales (a veces una sola pues la otra se da por
sobreentendida) que representan las lneas de alimentacin. Los circuitos se
disponen como lneas horizontales, es decir, como si fueran los peldaos de
una escalera, sujetos entre las dos lneas verticales. La figura No. 3.3 muestra
los smbolos estndar bsicos que se utilizan, as como un ejemplo de
peldaos en un diagrama de escalera.
La entrada como
contactos que no
se cierran hasta
que reciben una entrada
Salida A se obtiene cuando
se produce la entrada 1
La entrada
como contactos
que estn
cerrados hasta
que reciben una entrada
Salida B se obtiene cuando
producen las entradas 1 y 3
Salida Salida C se obtiene cuando
se producen la entrada 4 o 5
nstruccin
especial (bloque)
Fig. No. 3.3 Diagrama de tipo escalera
Cuando se dibuja la lnea de circuito de un peldao, las entradas siempre
preceden a las salidas y siempre debe haber por lo menos una salida por cada
lnea. Los peldao deben empezar con una o varias entradas y terminar con
una salida.
Las entradas y las salidas estn numeradas y la notacin utilizada depende del
fabricante del PLC; por ejemplo, en la serie F de PLC Mitsubishi antes de un
elemento de entrada hay una X y antes de un elemento de salida, una Y; la
numeracin empleada es la siguiente:
Entradas X400-407,410-413
X500-507,510-513
(24 entradas posibles)
Salidas Y430-437
Y530-537
(16 salidas posibles)
Entrada 1
Entrada 1 Entrada 3
Entrada 4
Entrada 5
Salida A
Salida B
Salida C
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
31
Para ilustrar cmo se dibuja un diagrama de escalera, considere la salida de
un PLC que sirve para energizar un solenoide cuando el interruptor de
arranque, normalmente abierto, que est conectado a la entrada se activa al
cerrado (figura No. 3.4 a).
El programa necesario se muestra en la figura No. 3.4 b. Empezando por la
entrada, encontramos el smbolo que indica normalmente abierto u, con
direccin de entrada X400. La lnea termina en la salida, el solenoide, cuyo
smbolo es O y cuya direccin de salida es Y430. Para indicar la terminacin
del programa se marca el peldao final. Cuando se cierra el interruptor, se
activa el solenoide. ste podra, por ejemplo, accionar una vlvula para que
entre agua en un recipiente.
Otro ejemplo es un control de temperatura encendido-apagado de la figura No.
3.5, en el cual la entrada vara de un valor bajo a uno alto cuando el sensor de
temperatura llega a la temperatura de calibracin. En este momento, la salida
cambia de encendido a apagado. El sensor de temperatura mostrado en la
figura es un termistor en una configuracin puente, y la salida conectada a un
amplificador operacional configurado como comparador. El programa muestra
la entrada como un contacto normalmente cerrado, produciendo la seal de
encendido y la salida. Cuando se abre el contacto, se produce la seal de
desconexin y la salida se apaga.
Para introducir estos programas de escalera se pueden utilizar teclas
especiales, o seleccionados en la pantalla de una computadora mediante un
ratn. Tambin se especifican mediante lenguaje mnemnico. Una vez
introducidos, el PLC traduce estos programas a lenguaje de mquina para que
el microprocesador y sus elementos respectivos puedan utilizados.
PLC
+24V
Y430
X400
nterruptor
Solenoide
a)
EN
D
X400 Y430
b)
Fig. No. 3.4 nterruptor controlando un solenoide
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
32
Funciones lgicas
Las funciones lgicas se pueden obtener con una combinacin de
interruptores, ahora se ver como se pueden escribir programas tipo escalera
para esas combinaciones.
AND (Y): La fig. No. 3.6a muestra una bobina que no se energiza a menos
que dos interruptores, en general abiertos, se cierren. Si los interruptores A y
B estn cerrados, se obtiene la funcin lgica AND (Y). El diagrama de
escalera empieza en , que es la entrada identificada como 1 y representa al
interruptor A conectado en serie con , entrada identificada como 2, la cual
representa al interruptor B. La lnea termina en O y representa a la salida. La
figura 3.6b muestra la lnea.
Termistor
Ajustar al
valor de
calibracin
PLC
+ 24 V
X400
Y430
Relevador
EIemento
caIefactor
+V
END
X400 Y430
Fig. No. 3.5 Sistema de control de temperatura
A B Solenoide
a)
Entrada 1 Entrada 2 Salida
b)
Fig. No. 3.6 Un Sistema AND (Y)
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
33
OR (O): La fig. No.3.7a ilustra una bobina que no se energiza hasta que uno
de los interruptores A o B, en general abiertos, se cierra, situacin que
corresponde a una compuerta lgica OR (O). El diagrama de escalera
empieza en , denominado entrada 1, que representa al interruptor A, el cual
est conectado en paralelo con , denominado entrada 2, que representa al
interruptor B. La lnea termina en O, que representa a la salida. La figura 3.7b
muestra la lnea.
NOR (NO-O): La figura 3.8 muestra cmo representar el diagrama del
programa de escalera para una compuerta NOR (NO-O). Dado que debe
haber una salida cuando ni A ni B tengan entrada, entonces cuando existe
entrada en A o en B no hay salida, el programa escalera muestra la entrada 1
en serie con la entrada 2, ambas representadas por contactos en general
cerrados.
A Solenoide
a)
Entrada 1
Entrada 2
Salida
b)
Fig. No. 3.7 Un Sistema OR (O)
B
A Solenoide
a)
Entrada 1 Entrada 2 Salida
b)
Fig. No. 3.8 Un Sistema NOR (NO-O)
B
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
34
NAND (NO-Y): La figura No. 3.9 muestra una compuerta NAND (NO-Y). No
hay salida cuando tanto A como B tienen una entrada. El diagrama del
programa de escalera indica que para que haya salida, ni la entrada 1 ni la
entrada 2 deben tener entradas.
XOR (O EXCLUYENTE): La figura No. 3.10 muestra cmo dibujar el diagrama
de un programa escalera para una compuerta. XOR (O EXCLUYENTE), donde
no hay salida cuando no hay entrada ni para la entrada 1 ni para la entrada 2 ni
tampoco cuando hay entrada tanto en la entrada 1 como en la entrada 2.
Ntese que las entradas estn representadas por dos juegos de contactos, uno
normalmente abierto y otro normalmente cerrado.
Suponga una situacin en la que el interruptor A, en general abierto, debe
activarse junto con uno de los otros interruptores B o C, en general abiertos,
para activar un solenoide. Esta configuracin se representa como la conexin
del interruptor A en serie con dos interruptores en paralelo, B y C (fig. 3.11).
Para energizar la bobina A y B o C deben estar cerrados. Considerado el
interruptor A en relacin con los interruptores en paralelo se produce una
situacin lgica AND (Y). Los dos interruptores que estn en paralelo producen
una situacin lgica OR.
A Solenoide
a)
Entrada 1
Entrada 2
Salida
b)
Fig. No. 3.9 Un Sistema NAND (NO-Y)
B
Entrada 1 Entrada 2 Salida
Fig. No. 3.10 Un Sistema XOR
Entrada 1 Entrada 2
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
35
De esta manera, se presenta una combinacin de dos compuertas. La tabla de
verdad es la siguiente:
Entradas Salida
A B C
0 0 0 0
0 0 1 0
0 1 0 0
0 1 1 0
1 0 0 0
1 0 1 1
1 1 0 1
1 1 1 1
El diagrama de escalera empieza con identificado como entrada 1 y
representa al interruptor A. ste se conecta en serie con dos en paralelo,
denominados entrada 2 y entrada 3, que representan a los interruptores B y C.
La lnea termina en O, la cual representa la salida, es decir, el solenoide.
Un ejemplo sencillo de un programa donde se utilizan compuertas lgicas es el
siguiente. Suponga que se desea producir una salida en el solenoide que
controla la vlvula con la que se abre la puerta de una tienda cuando el
encargado cierra un interruptor para abrir la tienda, y cuando un cliente se
aproxima a la puerta y, es detectado por un sensor que produce una seal. La
tabla de verdad de este sistema es:
nterruptor para abrir la
tienda
Sensor de cliente
aproximndose
Salida de solenoide
Apagado Apagado Apagado
Apagado Encendido Apagado
Encendido Apagado Apagado
Encendido Encendido Encendido
A Selonoide B
C
Entrada 1 Entrada 2
Entrada 3
Salida
b)
a)
Fig. 3.11: Solenoide controlado por interruptores
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
36
La tabla de verdad anterior corresponde a la de una compuerta AND (Y), por
lo que el programa para controlar la puerta es el que se muestra en la figura
No. 3.12.
Con frecuencia se presentan situaciones en las que es necesario mantener
energizada una bobina, aun cuando ya no exista la entrada que proporciona la
energa. Para lograr lo anterior se utiliza lo que se conoce como circuito de
enclavamiento. ste es un circuito de autosostenimiento, ya que despus de
ser energizado mantiene ese estado hasta que recibe otra entrada. Es decir,
recuerda su ltimo estado. La figura No. 3.13 ilustra un circuito de
enclavamiento. Cuando la entrada 1 se energiza y se cierra, se produce una
salida. Sin embargo, cuando hay una salida, el contacto asociado a la salida se
energiza y se cierra. Estos contactos aplican el operador OR (O) a los
contactos de la entrada 1. Por lo tanto, aun cuando el contacto de la entrada 1
se abra, el circuito mantendr energizada la salida. La nica manera de liberar
la salida es accionando el contacto de la entrada 2 el cual en general est
cerrado.
Para ejemplificar cmo se usa un circuito de enclavamiento, suponiendo que
se requiere controlar un motor mediante un PLC de manera que al oprimir por
un momento el botn de arranque, el motor comienza a trabajar; cuando se
acciona el interruptor de paro, el motor se apaga; usando focos indicadores se
sabe si el motor est encendido o apagado. La figura No. 3.14 muestra el
diagrama equivalente. Cuando no hay entradas, el foco del motor indica que
est apagado. El contacto del motor, en general cerrado, enciende el foco de
apagado. Al oprimir el botn de arranque, el contacto, en general abierto, se
Entrada 1 Entrada 2 Salida
Fig. 3.12 Sistema de la puerta de una tienda
PLC
Salidas
Entradas
Tienda
abierta
Cliente
Solenoide
Entrada 1 Entrada 2 Salida
Fig. No. 3.13 Circuito de enclavamiento
Salida
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
37
cierra y el motor se enciende. El contacto del motor, que est en paralelo con
el contacto de arranque, retiene la condicin anterior. Adems, el otro contacto
del motor, en general cerrado, se abre, y se apaga el foco de apagado; el
contacto del motor, en general abierto, se cierra y se activa el foco de
encendido. El interruptor de paro abre el contacto, antes cerrado, y para el
motor.
Con frecuencia se presentan dos situaciones de control que requieren
secuencias de salidas; la conmutacin de una a otra salida se controla
mediante sensores. Suponga que se requiere un programa de escalera para un
sistema neumtico (figura No. 3.15) en el cual se controlan dos cilindros
biestables, A y B, mediante vlvulas de doble solenoide; en este caso se usan
los sensores de inicio y final de carrera a-, a+, b- y b+ para detectar los lmites
del movimiento del vstago de los pistones; se requiere de una secuencia de
activacin de los cilindros correspondiente a A+, B+, A- Y B-.
Arranque
Paro
Motor
Fig. No. 3.14: Enclavamiento de un motor
Motor
Motor
Motor
Foco apagado
Foco encendido
END
A
A+ A-
a- a+ B b- b+
B+ B-
Fig. No. 3.15 Puesta en secuencia de un pistn
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
38
La figura No. 3.16 muestra una opcin para configurar el programa anterior.
En el primer peldao se induce la entrada del interruptor de arranque A. La
extensin del cilindro de A, es decir, cuando se energiza el solenoide A+, tiene
lugar slo cuando el interruptor de inicio est cerrado y tambin cuando el
interruptor b- est cerrado; este ltimo indica que el cilindro B se contrae.
Cuando se extiende el cilindro A, el interruptor a+, el cual indica la extensin
de A, se activa. Esto produce una salida que se enva al solenoide B+, y como
resultado B se extiende. Por efecto de lo anterior, se cierra el interruptor, lo
cual indica la extensin de B, es decir, del interruptor b+; se produce la salida
del interruptor limitador a -, se produce una salida hacia el solenoide B -, la
cual produce la contraccin del cilindro A. Consecuencia de dicha contraccin,
se cierra el interruptor limitador a- y se produce una salida que se enva al
solenoide B-, lo cual produce la contraccin de B. Con lo anterior concluye el
ciclo del programa y se regresa al primer peldao; el programa queda en
espera de que se cierre el interruptor de inicio para que se repita de nuevo el
ciclo.
Cada uno de los peldaos de un programa escalera representa una lnea del
programa; la escalera constituye el programa completo en 'lenguaje de
escalera'. Para introducir el programa en el PLC, el programador emplea un
teclado con los smbolos grficos de los elementos de escalera o selecciona
los smbolos en una pantalla de computadora mediante un ratn; el tablero o
computadora que contiene el programa traduce los smbolos a lenguaje de
mquina que se guardan en la memoria del PLC.
Otra manera de introducir un programa es traducir el programa escalera en
instrucciones conocidas como mnemnicos; en este caso, cada lnea de
cdigo corresponde a un elemento de la escalera; a continuacin stos se
introducen en el panel de programacin o en la computadora y se traducen a
lenguaje de mquina. Los mnemnicos difieren de un fabricante a otro.
nicio b- A+
Fig. 3.16 Puesta en secuencia de un pistn
a+
b-
a-
A-
B-
END
B+
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
39
Para los PLC's de la serie F de Mitsubishi, los mnemnicos son los siguientes:
LD niciar un peldao con un contacto en general abierto
OUT Una salida
AND Un elemento en serie y, por lo tanto, una instruccin lgica AND (Y)
OR Elementos en paralelo y, por lo tanto, una instruccin lgica OR (O)
Una instruccin lgica NOT (NO)
... Se emplea junto con otras instrucciones para inverso de stas.
OR Una funcin lgica OR NOT
AN Una funcin lgica AND NOT
LD nicia un peldao con un contacto en general cerrado
ANB AND utilizado con dos subcircuitos
ORB OR utilizado con dos subcircuitos
RST Restablecimiento de registro de corrimiento/contador
SHF Corrimiento
K nsertar una constante
END Fin de la escalera
Los mnemnicos de otros fabricantes no difieren mucho de stos y los
principios en que se basan as como su aplicacin son idnticos. Por
ejemplo, los cdigos que se usan para los PLC's de OMRON son:
LD niciar un peldao con un contacto en general abierto.
OUT Salida
TM Salida de un temporizador
CNT Salida de contador
AND Un elemento en serie y, por lo tanto, a instruccin lgica AND
(Y)
OR Elementos en paralelo y, por lo tanto, una instruccin lgica
OR (O)
NOT Una instruccin lgica NOT (NO)
...NOT Se utiliza con otras instrucciones para indicar lo inverso de
stas.
OR NOT Una funcin lgica OR NOT
AND NOT Una funcin lgica AND NOT
LD NOT niciar un peldao con un contacto en general cerrado
AND LD AND utilizada con dos subcircuitos
OR LD OR utilizada con dos subcircuitos
# nsertar una constante
END Fin de la escalera
Los siguientes casos muestran cmo introducir peldaos especficos
en una escalera. Con base en los mnemnicos de Mitsubishi, la
compuerta AND (Y) mostrada en la figura No. 3.17 se introducira
como:
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
40
Paso nstruccin
0 LD X400
1 AND X401
2 OUT Y430
La compuerta OR (O) de la figura No. 3.18 introducira como:
Paso nstruccin
0 LD X400
1 OR X401
2 OUT Y430
La compuerta NOR (NO O) de la figura No. 3.19 se introducira como:
Paso nstruccin
0 LD X400
1 AN X401
2 OUT Y430
X400 X401 Y430
Fig. No. 3.17 Un Sistema AND (Y)
X400
Fig. No. 3.18 Un Sistema OR (O)
X401
Y430
X400
Fig. No. 3.19 Un Sistema NOR (NO-O)
X401 Y430
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
41
La compuerta NAND (NO-Y) de la figura No. 3.20 se introducira :
Paso nstruccin
0 LD X400
1 OR X401
2 OUT Y430
La compuerta XOR (O EXCLUYENTE) de la figura No. 3.21 como:
Paso nstruccin
0 LD X400
1 AN X401
2 LD X400
3 AND X401
4 ORB
5 OUT Y430
Despus de leer las dos primeras instrucciones, la tercera instruccin
inicia una nueva lnea. Sin embargo, todava no hay salida debido a la
cual la primera lnea concluya. En consecuencia, la CPU reconoce
que en la segunda lnea hay una lnea paralela y lee todos los
elementos listados, hasta que llega a la instruccin ORB. El
mnemnico ORB (unin en paralelo de dos ramas o bloques) indica a
la CPU que debe aplicar un operador OR (O) a los resultados de los
pasos 0 y 1, junto con los de los pasos 2 y 3.
X400
Fig. No. 3.21 Un Sistema XOR (O EXCLUENTE)
X400
Y430 X401
X401
X400
Fig. No. 3.20 Un Sistema NAND (NO-Y)
X401
Y430
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
42
4 LENGUAJE DE PROGRAMACIN STEP 7 (PLC SIEMENS):
4.1 Operaciones con Contactos.
CONTACTOS ESTANDAR
El contacto abierto se cierra (se activa) s al valor binario de la direccin n = 1.
El contacto cenado se cierra (se activa), s el valor binario de la direccin n = 0.
En lenguaje AWL el contacto abierto se representa con las operaciones:
LD cargar
A AND (Y)
O OR (O)
En lenguaje A WL el contacto cerrado se representa con las operaciones:
LDN cargar valor negado
AN AND (Y-NO)
ON OR (0-NO)
Operandos: n: , Q, M, SM, T, C, V, S
Ambas operaciones leen el valor direccionado de la imagen del proceso
cuando sta se actualiza al comienzo de cada ciclo.
CONTACTOS DIRECTOS
El contacto abierto directo se cierra (se activa) s al valor binario de la entrada
fsica se direcciona n = 1. El contacto cerrado directo se cierra (se activa), s el
valor binario de la entrada fsica se direcciona n = 0.
En lenguaje A WL el contacto abierto se representa con las operaciones:
LD cargar
Al AND (Y)
O OR (O) .
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
43
En lenguaje A WL el contacto cerrado se representa con las operaciones:
LDNl cargar valor negado
AN AND (Y-NO directa)
ONl OR (O-NO directa)
Operandos: n:
Ambas operaciones leen el valor direccionado de la entrada fsica al ejecutarse
la operacin, pero la imagen del proceso no se actualiza.
CONTACTO NOT
El contacto NOT invierte el sentido de circulacin de la corriente. La corriente
se detiene al alcanzar el contacto NOT. Si no logra alcanzar el contacto,
entonces hace circular la corriente.
En AWL, la operacin invertir primer valor (NOT) invierte el primer valor de la
pila de 0 a 1, o bien de 1 a 0.
Este contacto no tiene operandos.
DETECTAR FLANCO POSITIVO Y NEGATIVO
El contacto detectar flanco positivo (P) permite que fluya la corriente durante un
ciclo cada que se produce un cambio 0 a 1 (off a on).
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
44
En lenguaje AWL, dicho contacto se representa con la operacin detectar
flanco positivo (EU). Cuando se detecta un cambio de seal de 0 a 1 en el
primer valor de la pila, sta se pone a 1. En caso contrario se pone a 0. El
contacto detectar flanco negativo (N) y la operacin respectiva (ED), operan de
forma contraria. La representacin en los lenguajes KOP y AWL se pueden
apreciar en las siguientes figuras.
Este contacto no tiene operandos.
EJEMPLOS DE OPERACIN CON CONTACTOS
Con el objeto de dar una idea ms clara de la programacin en los lenguajes
KOP y AWL en lo que corresponde a operaciones de contactos en las
siguientes figuras se indica un ejemplo de aplicacin, tanto en la
representacin como en el cronograma de operacin.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
45
4.2 Operaciones de comparacin.
La operacin de comparacin se emplea para comparar dos valores; n1 y n2.
La comparacin puede ser:
- n1 es igual a n2 n1 = n2
- n1 es mayor o igual a n2 n1>=n2
- n1 es menor o igual a n2 n1<=n2
Se pueden crear operaciones contrarias a las indicadas usando la operacin
NOT.
COMPARAR BYTE
La operacin Comparar byte se utiliza para comparar dos valores: n1 y n2.
Se puede comparar n1 = n2, n1 >= n2 y n1 <= n2.
Operandos: n1, n2: VB, B, QB, MB, SMB, AC, constante, *VD, *AC, SB
En KOP, el contacto se activa si la comparacin es verdadera.
En AWL, las operaciones cargan un 1 en el nivel superior de la pila y
combinan el valor 1 con el primer valor de la pila mediante Y u O cuando la
comparacin es verdadera.
Las comparaciones de bytes no llevan signo.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
46
COMPARAR ENTERO PALABRA
La operacin Comparar entero palabra se utiliza para comparar dos valores: n1
y n2. Se puede comparar n1 = n2, n1 >= n2 n1 <= n2.
Operandos:
n1, n2: VW, T, C, W, QW, MW, SMW, AC, AW, constante, *VD, *AC, SW
En KOP, el contacto se activa si la comparacin es verdadera.
En AWL, las operaciones cargan un 1 en el nivel superior de la pila y
combinan el valor 1 con el primer valor de la pila mediante Y u O cuando la
comparacin es verdadera.
COMPARAR ENTERO PALABRA DOBLE
La operacin Comparar entero palabra doble se utiliza para comparar dos
valores: n1 y n2. Se puede comparar n1 = n2, n1 >= n2 n1 <= n2.
Operandos: n1, n2: VD, D, QD, MD, SMD, AC, HC, constante, *VD, *AC, SD
En KOP, el contacto se activa si la comparacin es verdadera.
En AWL, las operaciones cargan un 1 en el nivel superior de la pila y
combinan el valor 1 con el primer valor de la pila mediante Y u O cuando la
comparacin es verdadera.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
47
COMPARAR REAL
La operacin Comparar real se utiliza para comparar dos valores: n1 y n2. Se
puede comparar n1 = n2, n1 >= n2 y n1 <= n2.
Operandos: n1, n2: VD, D, QD, MD, SMD, AC, constante, *VD, *AC, SD
En KOP, el contacto se activa si la comparacin es verdadera.
En AWL, las operaciones cargan un 1 en el nivel superior de la pila y
combinan el valor 1 con el primer valor de la pila mediante Y u O cuando la
comparacin es verdadera. Las comparaciones de nmeros reales llevan
signo.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
48
EJEMPLO DE OPERACIONES DE COMPARACION
El siguiente segmento da un ejemplo de la forma como se realiza la operacin
de comparacin.
4.3 Operaciones de Salida.
ASIGNAR
Al ejecutar la operacin Asignar se activa el parmetro indicado (n).
En AWL, la operacin Asignar (=) copia el primer valor de la pila en el
parmetro indicado (n).
Operandos: n: , Q, M, SM, T, C, V, S
ASIGNAR DIRECTAMENTE
Al ejecutar la operacin Asignar directamente se activa directamente la salida
fsica indicada (n).
En AWL, la operacin Asignar directamente (=) copia el primer valor de la pila
directamente en la salida fsica indicada (n).
Operandos: n: Q
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
49
La "I indica que la operacin se ejecuta directamente. Al ejecutarse sta, el
nuevo valor se escribe tanto en la salida fsica como en la correspondiente
direccin de la imagen del proceso. En cambio, en las operaciones no directas,
el nuevo valor se escribe slo en la imagen del proceso.
PONER A 1 Y PONER A 0
Al ejecutar las operaciones Poner a 1 y Poner a 0, se activa (se pone a 1) o se
desactiva (se pone a 0) el nmero indicado de entradas y/o salidas (N) a partir
de S_BT, respectivamente.
Operandos: S_BT: , Q, M, SM, T, C, V, S N: B, QB, MB, SMB, VB, AC,
constante, *VD, *AC, SB
El margen de entradas y/o salidas que se pueden activar o desactivar est
comprendido entre 1 y 255. Al utilizarse la operacin Poner a 0, si S_BT es un
bit T (bit de temporizacin) o un bit C (bit de contaje), se desactivar dicho bit y
se borrar el valor del temporizador o contador, respectivamente.
PONER A 1 Y A 0 DIRECTAMENTE
Cuando se ejecutan las operaciones Poner a 1 directamente y Poner a 0
directamente, se activa (se pone a 1) o se desactiva (se pone a 0) directamente
el nmero indicado de salidas fsicas (N) a partir de S_BT, respectivamente.
Operandos: S_BT: Q N: B, QB, MB, SMB, VB, AC, constante, *VD, *AC, SB
Se pueden activar o desactivar un margen comprendido entre 1 y 64 salidas.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
50
OPERACIN NULA
La Operacin nula (NOP) no tiene efecto alguno en la ejecucin del programa.
El operando N es un nmero comprendido entre 0 y 255.
EJEMPLO DE OPERACIONES DE SALIDA
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
51
4.4 Operaciones con Temporizadores.
Los temporizadores empleados en los PLCs son de dos tipos:
De acuerdo a la conexin (TON)
De acuerdo a la conexin memorizada (TONR)
Las operaciones de ambos tipos empiezan a contra hasta el valor mximo al
ser habilitados.
Si el valor actual (Txxx) es mayor o igual al de la preseleccin (PT). se active el
bit de temporizacin.
Cuando se inhibe la operacin, el temporizador de retardo a la conexin se
pone a 0, en tanto que el temporizador de retardo a la conexin memorizado se
detiene. Ambos temporizadores se detienen al alcanzar el mximo.
En estas representaciones: PT puede ser: VW, T, C, W, QW, MW, SMW, AC,
AW, constante.
Txxx est dada en la tabla de los temporizadores.
Los datos requeridos en un temporizador son:
La resolucin, que corresponde al nmero de temporizador.
El valor actual que resulta del valor de contaje multiplicado por la base
del tiempo. Por ejemplo, el valor actual de un contador de 10
milisegundos, con valor de contaje de 50 es 500 ms.
Para los PLCs SMATC, las resoluciones son:
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
52
Los temporizadores se emplean para implementar funciones controladas por el
tiempo.
Los dos tipos de temporizadores cuentan adelante mientras est activa la seal
de entrada, pero no actan al estar desactivada la misma. Al desactivarse la
entrada de habilitacin, el temporizador TON se pone a 0 automticamente,
pero el temporizador TONR conserva su ltimo valor.
El temporizador TON es apropiado para temporizar intervalos individuales,
mientras que el TONR lo es para acumular varios intervalos individuales.
De acuerdo a esta secuencia, los temporizadores actan de la siguiente
secuencia:
Los temporizadores se controlan mediante una sola entrada de habilitacin y
disponen de:
Un valor actual que almacena el tiempo transcurrido desde que fueron
habilitados.
Un valor de preseleccin (P1) que se compara con el valor actual cada
vez que se actualiza ste y tras ejecutarse la operacin de
temporizacin.
Si el valor actual es mayor que o igual al valor de la preseleccin, se activa el
bit de temporizacin (T).
Al inicializar un temporizador, se pone a 0 su valor actual y se desactiva su bit
T.
Es posible borrar cualquier temporizador mediante la operacin poner a cero.
Un temporizador TONR se inicializa a travs de esta operacin.
Al escribir un 0 en el valor actual del temporizador su bit de temporizacin no
se desactivar, lo mismo ocurre si se escribe un cero en el bit T de un
temporizador.
Los temporizadores de 1 ms tienen las siguientes caractersticas:
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
53
Se actualizan cada milisegundo por la rutina de interrupcin del sistema
que mantiene la base de tiempo del mismo. Estos permiten controlar las
operaciones en forma precisa.
El valor actual de estos temporizadores activos se actualizan
automticamente en una rutina del sistema, por lo cual su valor actual y
el bit T se pueden actualizar cualquier instante en el ciclo. as como
varias veces en el ciclo, si ste dura ms de 1 ms.
Al inicializar se desactiva, se pone a 0 su valor actual y se borra su bit T.
El intervalo para estos temporizadores puede tener una duracin
mxima de 1 ms, por lo que es necesario programar el valor de
preseleccin a un valor que supere 1 al intervalo mnimo deseado. Por
ejemplo, para garantizar un intervalo mnimo de 35 ms, es preciso
ajustado a 36.
Los temporizadores de 10 ms tienen las siguientes caractersticas:
Cuentan la cantidad de intervalos de 10 ms transcurridos tras haberse
habilitado.
Se actualizan al comienzo de cada ciclo, aadiendo la cantidad de
intervalos de 10 ms transcurridos (desde la ltima actualizacin) al valor
actual del temporizador. Se actualiza una sola vez por ciclo y no se
modificas mientras se ejecuta el programa principal del usuario.
Al inicializar se desactiva, se pone a O su valor actual y se borra su bit T.
El intervalo para estos temporizadores puede tener una duracin
mxima de 10 ms, por lo que es necesario programar el valor de
preseleccin a un valor que supere 1 al intervalo mnimo deseado. Por
ejemplo, para garantizar un intervalo mnimo de 120 ms, es preciso
ajustado a 13.
Los temporizadores de 100 ms tienen las siguientes caractersticas:
Cuentan la cantidad de intervalos de 100 ms transcurridos desde que se
actualizaron.
Se actualizan aadiendo el valor acumu1ativo de 100 ms al valor actual
del temporizador cuando se ejecuta la accin del mismo.
Se actualizan al ejecutar la operacin de temporizacin.
Se los emplea cuando se ejecute exactamente una operacin en cada
ciclo.
Al inicializar se desactiva, se pone a 0 su valor actual y se borra su bit T.
En los siguientes grficos se puede apreciar la conexin de temporizadores de
1, 10 y 100 ms.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
54
EJEMPLO DE UN TEMPORIZADOR DE RETARDO A LA CONEXIN
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
55
EJEMPLO DE UN TEMPORIZADOR DE RETARDO A LA CONEXIN
MEMORIZADO
4.5 Operaciones con Contadores.
La operacin Contar adelante empieza a contar hasta el valor mximo cuando
se produce un flanco positivo en la entrada de contaje adelante (CU). Si el valor
actual (Cxxx) es mayor o igual al valor de preseleccin (PV), se activa el bit de
contaje (Cxxx). El contador se inicializa al activarse la entrada de desactivacin
(R).
En AWL, la entrada de desactivacin es el primer valor de la pila, en tanto que
la entrada de contaje adelante se carga en el segundo nivel de la pila.
La operacin Contar adelante/atrs empieza a contar adelante cuando se
produce un flanco positivo en la entrada de contaje adelante (CU).
Por el contrario, empieza a contar atrs cuando se produce un flanco positivo
en la entrada de contaje atrs (CD). Si el valor actual (Cxxx) es mayor o igual al
valor de preseleccin (PV), se activa el bit de contaje (Cxxx). El contador se
inicializa al activarse la entrada de desactivacin (R).
En AWL, la entrada de desactivacin es el primer valor de la pila, la entrada de
contaje atrs se carga en el segundo nivel de la pila y la entrada de contaje
adelante, en el tercero.
Operandos: Cxxx: 0 a 255
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
56
PV: VW, T, C, W, QW, MW, SMW, AC, AW, constante, *VD, *AC, SW
La operacin Contar adelante (CTU) empieza a contar adelante a partir del
valor actual cuando se produce un flanco positivo en la entrada de contaje
adelante. El contador se inicializa cuando se activa la entrada de desactivacin
o al ejecutarse la operacin Poner a 0. El contador para de contar cuando se
alcanza el valor mximo (32.767).
La operacin Contar adelante/atrs (CTUD) empieza a contar adelante cuando
se produce un flanco positivo en la entrada de contaje adelante, y empieza a
contar atrs cuando se produce un flanco positivo en la entrada de contaje
atrs. El contador se inicializa cuando se activa la entrada de desactivacin o al
ejecutarse la operacin Poner a 0. Cuando se alcanza el valor mximo
(32.767), el siguiente flanco positivo en la entrada de contaje adelante invertir
el contaje hasta alcanzar el valor mnimo (32.768). gualmente, cuando se
alcanza el valor mnimo (32.768), el siguiente flanco positivo en la entrada de
contaje atrs invertir el contaje hasta alcanzar el valor mximo (32.767).
Cuando se inicializa un contador con la operacin Poner a 0, se desactivan
tanto el bit de contaje como el valor actual del contador.
Los contadores Contar adelante y Contar adelante/atrs tienen un valor actual
que almacena el valor de contaje actual. Tambin disponen de un valor de
preseleccin (PV) que se compara con el valor actual cuando se ejecuta la
operacin de contaje. Si el valor actual es mayor o igual al valor de
preseleccin, se activa el bit de contaje (bit C). En caso contrario, dicho bit se
desactiva.
El nmero del contador se debe utilizar para direccionar tanto el valor actual
como el bit C de dicho contador.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
57
EJEMPLO DE UNA OPERACIN DE CONTAJE
4.6 Operaciones Aritmticas y de Regulacin PID
SUMAR Y RESTAR ENTEROS DE 16 BITS
Las operaciones Sumar enteros de 16 bits y Restar enteros de 16 bits suman /
restan dos enteros de 16 bits, dando como resultado 16 bits (OUT).
Operandos:
N1, N2: VW, T, C, W, QW, MW, SMW, AC, AW, constante, *VD, *AC, SW
OUT: VW, T, C, W, QW, MW, SMW, AC, *VD, *AC, SW
En KOP: N1 + N2 = OUT N1 N2 = OUT
En AWL: N1 + OUT = OUT OUT N1 = OUT
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
58
SUMAR Y RESTAR ENTEROS DE 32 BITS
Las operaciones Sumar enteros de 32 bits y Restar enteros de 32 bits suman /
restan dos enteros de 32 bits, dando como resultado 32 bits (OUT).
Operandos:
N1, N2: VD, D, QD, MD, SMD, AC, HC, constante, *VD, *AC, SD
OUT: VD, D, QD, MD, SMD, AC, *VD, *AC, SD
En KOP: N1 + N2 = OUT N1 N2 = OUT
En AWL: N1 + OUT = OUT OUT N1 = OUT
SUMAR Y RESTAR REALES
Las operaciones Sumar reales / Restar reales suman / restan dos nmeros
reales de 32 bits, dando como resultado un nmero real de 32 bits (OUT).
Operandos:
N1, N2: VD, D, QD, MD, SMD, AC, constante, *VD, *AC, SD
OUT: VD, D, QD, MD, SMD, AC, *VD, *AC, SD
En KOP: N1 + N2 = OUT N1 N2 = OUT
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
59
En AWL: N1 + OUT = OUT OUT N1 = OUT
MULTIPLICAR Y DIVIDIR ENTEROS DE 16 BITS
La operacin Multiplicar enteros de 16 bits multiplica dos nmeros enteros de
16 bits, dando un resultado 32 bits (OUT).
En AWL, la palabra menos significativa (16 bits) de OUT se utiliza como uno de
los factores.
La operacin Dividir enteros de 16 bits divide dos nmeros enteros de 16 bits,
dando un resultado de 32 bits (OUT) compuesto de un cociente de 16 bits (los
menos significativos) y un resto de 16 bits (los ms significativos).
En AWL, la palabra menos significativa (16 bits) de OUT se utiliza como
dividendo.
Operandos:
N1, N2: VW, T, C, W, QW, MW, SMW, AC, AW, constante, *VD, *AC, SW
OUT: VD, D, QD, MD, SMD, AC, *VD, *AC, SD
En KOP: N1_N2 = OUT N1 / N2 = OUT
En AWL: N1_OUT = OUT OUT / N1 = OUT
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
60
MULTIPLICAR Y DIVIDIR REALES
La operacin Multiplicar reales multiplica dos nmeros reales de 32 bits, dando
como resultado un nmero real de 32 bit (OUT).
La operacin Dividir reales divide entre s dos nmeros reales de 32 bits, dando
como resultado un cociente de nmero real de 32 bits.
Operandos:
N1, N2: VD, D, QD, MD, SMD, AC, constante, *VD, *AC, SD
OUT: VD, D, QD, MD, SMD, AC, *VD, *AC, SD
En KOP: N1_N2 = OUT N1/ N2 = OUT
En AWL: N1_OUT = OUT OUT / N1 = OUT
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
61
RAZ CUADRADA
La operacin Raz cuadrada de nmeros reales extrae la raz cuadrada de un
nmero real de 32 bits (N), dando como resultado un nmero real de 32 bits
Operandos:
N: VD, D, QD, MD, SMD, AC, constante, *VD, *AC, SD
OUT: VD, D, QD, MD, SMD AC, *VD, *AC, SD
EJEMPLOS DE OPERACIONES ARITMTICAS
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
62
REGULACIN PID
La operacin Regulacin PD ejecuta el clculo de un lazo de regulacin PD
en el LOOP referenciado en base a las informaciones de entrada y
configuracin definidas en la TABLE.
La operacin PD (lazo de regulacin con accin proporcional, integral,
derivada) sirve para ejecutar el clculo PD. Para habilitar el clculo PD, el
primer nivel de la pila lgica (TOS) deber estar en ON (circulacin de
corriente). Esta operacin tiene dos operandos: una direccin TABLE que
constituye la direccin inicial de la tabla del lazo y un nmero LOOP que es una
constante comprendida entre 0 y 7. Un programa slo admite ocho operaciones
PD. Si se utilizan dos o ms operaciones PD con el mismo nmero de lazo
(aunque tengan diferentes direcciones de tabla), los dos clculos PD se
interferirn mutuamente siendo impredecible la salida resultante.
La tabla del lazo almacena nueve parmetros que sirven para controlar y
supervisar la operacin del mismo. ncluye el valor actual y previo de la variable
del proceso (valor real), la consigna, la salida o magnitud manipulada, la
ganancia, el tiempo de muestreo, el tiempo de accin integral, el tiempo de
accin derivada y la suma integral (bias).
Para poder realizar el clculo PD con el intervalo de muestreo deseado, la
operacin PD deber ejecutarse bien dentro de una rutina de interrupcin
temporizada o desde el programa principal, a intervalos controlados por un
temporizador. El tiempo de muestreo debe definirse en calidad de entrada para
la operacin PD a travs de la tabla del lazo.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
63
5 COMUNICACIN DE CONTROLADORES (2)
NUEVOS SISTEMAS DE CABLEADO
En los primeros autmatas el cableado se hacia hilo a hilo directamente a los
horneros de los mdulos de entrada-salida del autmata programable. En la
actualidad existen otras opciones como son los sistemas de precableado, las
entradas salidas distribuidas y los buses de campo. Las opciones de que
dispone un ingeniero a la hora de plantear la distribucin de cableado en una
instalacin ndustrial son muy variadas.
Cableado clsico.
Cableado mediante bases de precableado.
Entradas Salidas distribuidas.
Autmatas Multirack.
Buses de Campo.
CabIeado cIsico
Los captadores son cableados hilo a hilo a las entradas digitales del autmata
con conexin por bornero de tomillos. Las salidas digitales son cableadas a los
preactuadores, los cuales se suelen encontrar en el propio armario del
autmata o en uno contiguo. Del armario salen los cables de potencia hacia los
actuadores de la mquina.
Los problemas que surgen son los siguientes:
Posible Excesiva longitud de cable desde los captadores hasta el
armario del autmata.
Los cables de potencia salen del armario del autmata y deben llegar
hasta el accionador, con las posibles cadas de tensin.
Un problema aadido consiste en los ruidos que inducen estos cables de
potencia en los cables de seal de los captadores.
Los cables de los sensores y captadores son llevados a cajas de campo donde
se cablean en borneros. De los borneros de las cajas de campo salen
mangueras de cable hacia el armario del autmata donde se cablean a los
mdulos de entradas digitales.
Sistemas de precabIeado
En el mercado existen autmatas de pequeo formato pero que admiten
mdulos de alta densidad de hasta 64 entradas-salidas digitales. El pequeo
tamao de los mdulos obliga a disponer de un sistema de cableado distinto al
bornero de tomillos. Estos mdulos disponen de una serie de conectores donde
se enchufan unos cables de conexin que en el otro extremo se conectan a
unas bases de precableado a tomillo donde se pueden conectar los cables de
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
64
captadores y preactuadores. Los cables que unen las bases de precableado
con los mdulos del autmata son realmente una manguera de cables.
El pequeo tamao de los mdulos tambin obliga a que las salidas digitales
sean estticas a 24 VCC No obstante existen bases de precableado con rels
internos que transfonnan la seal de 24 VCC en la apertura o cierre de un
contacto de rel.
Las bases de precableado funcionan como borneras de los mdulos de
entrada- salida del autmata. Necesitan alimentacin a 24 VCC para activar los
leds indicadores de seal en las entradas e indicadores de activacin de las
salidas. Esta alimentacin tambin es necesaria para activar las bobinas de los
rels en las bases que dispongan de stos.
De esta forma autmatas de pequeas dimensiones pueden tener un gran
nmero de entradas/salidas, el.cableado no se hace directamente en el mdulo
sino en la base de conexin.
Pero el cableado externo al armario del autmata sigue siendo el mismo. Las
mangueras de cable de los captadores se llevarn a las bases de precableado
y de ah al mdulo de entradas. Y los cables de los preactuadores salen de las
bases de precableado. Las bases de precableado deben estar en el propio
armario del autmata dado que los cables de conexin como mximo miden
tres metros.
Fig. 5.1 Conexin de un mdulo i/o a las bases de precableado
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
65
Fig. 5.2 Cableado de un autmata
Mediante las bases de precableado un autmata de pequeo formato puede
llegar a tener un gran nmero de entradas/salidas. En el caso del TSX Micro se
pueden incorporar hasta cuatro mdulos de 64 entradas-salidas de alta
densidad. Aunque los mdulos de salidas son estticos a 24 V cc, mediante las
bases de precableado se puede disponer de salidas a rel.
La mejora slo se nota a nivel interno en el Armario donde se encuentra el
Autmata. El cableado es igual de complicado que el cableado clsico.
Exteriormente al Armario el cableado es idntico al cableado clsico.
Demasiados cables!, dan ms posibilidades de error a la hora de la puesta en
marcha. Demasiados Tomillos que apretar! .
Entradas/saIidas distribuidas
En las nstalaciones Automatizadas puede existir una gran distancia entre la
situacin de los captadores y actuadores y el armario donde se encuentra el
autmata programable. Esto puede suponer una gran cantidad de cable y de
mangueras de cable. Una solucin que se adopta son las entradas-salidas
distribuidas. El Autmata programable mediante un mdulo de comunicaciones
se comunica con mdulos de entradas-salidas digitales distribuidos por la
instalacin.
Los mdulos de entrada/salida distantes se dispondrn en armarios ms
cercanos a la zona que controlan, incluso si es posible, en la propia estructura
o chasis de la mquina. Se consigue que los cables de los captadores sean
mucho ms cortos. Se debe tener en cuenta que al distribuir tambin las
salidas, los preactuadores podrn estar ms cerca de la mquina en el armario
donde se encuentra el mdulo distante o en la propia mquina. Los cables de
potencia sern mucho ms cortos evitando las cadas de tensin y
disminuyendo las posibles perturbaciones en los cables de seal.
El cableado, al ser ms cercano a la mquina, es ms sencillo de realizar, as
como de comprobar su buen funcionamiento. Al autmata principal slo le llega
un cable de comunicacin con los mdulos de entrada/salida distantes.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
66
Fig. 5.3 Entradas y salidas distribuidas
Fig. 5.4 Configuracin de i/o distribuidas
Hacia el Autmata programable slo llega un cable de red, simplificando la
instalacin ndustrial. Ahorro en longitud de cable y Ahorro en tiempo de
Instalacin!! Las pruebas del cableado son ms sencillas dado que los cables
tienen menor longitud. Pero el cableado de captadores y actuadores a nivel
local sigue siendo igual de complicado que en el cableado clsico.
Autmatas muItirack
Los autmatas Premium pueden expandirse hasta un total de 16 racks que se
comunican mediante el Bus X. La longitud de este bus puede, ser de hasta 250
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
67
m (con mdulos de extensin remota) permitiendo la distribucin de los racks
por la instalacin automatizada.
Solamente en un rack debe estar la unidad central de proceso. En los dems
slo debe conectarse en el primer puesto de enchufe una fuente de
alimentacin para alimentar a los mdulos que se conecten al rack. Cada rack
puede contener hasta 12 puestos de enchufe.
Fig.5.5 Bus X
BUSES DE CAMPO
Los sistemas de cableado tradicionales, como pueden ser el cableado clsico o
el cableado mediante bases de precableado, presentan los problemas que ya
han sido detallados en el tema de Sistemas de Cableado. Cada Captador es
cableado al autmata mediante dos o tres cables, lo que supone que por cada
final de carrera el operario que realiza la instalacin tiene que apretar como
mnimo 4 tomillos (dos del captador y 2 del autmata).
El nmero de cables crece con el nmero de captadores y actuadores
complicando el proceso de cableado de una instalacin. Los cables debern
ser numerados en sus dos extremos o bien utilizar mangueras de cables
multicolores para evitar la confusin.
Adems, en los cables de seal se pueden inducir ruidos que den lugar a fallos
en el funcionamiento, sobre todo en control de seales analgicas.
Otro problema es que los captadores y actuadores slo pueden ser vistos y
escritos desde el Autmata al que estn cableados. En las instalaciones
normalmente se deja un 20% de mdulos libres para futuras reformas e
instalaciones.
A su favor los sistemas tradicionales cuentan con muchos operarios con gran
experiencia en la realizacin de estas instalaciones.
A finales de los ochenta y sobre todo en los noventa aparecen en el mercado
nuevas opciones que cambian radicalmente el sistema de comunicacin entre
captadores y actuadores y la Unidad de Control (Automata o PC). Estas nuevas
opciones son los buses de campo.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
68
Mediante un solo cable de comunicacin serie el Autmata se conecta a los
captadores y actuadores. Pero no solamente se comunica con los captadores
clsicos "todo o nada" y Analgicos, sino tambin con los denominados
genricamente dispositivos inteligentes. Estos dispositivos pueden ser
variadores de velocidad, controladores de robots, Arrancadores; Reguladores
PD, Terminales de Visualizacin, Sistemas de dentificacin e incluso
Autmatas programables, Computadores ndustriales y Sistemas de
Programacin y Configuracin.
En el cableado clsico, para que el autmata trabaje con dispositivos
inteligentes como variadores de velocidad, se tienen que cablear varias
entradas digitales, varias entradas analgicas, una salida analgica y varias
salidas digitales. Todo esto solamente con un variador de velocidad.
Los buses de campo como Profibus, nterbus, Fipio permiten el cableado de
dispositivos inteligentes mediante un solo cable de comunicacin.
Las modificaciones y ampliaciones de las nstalaciones se pueden realizar
fcilmente slo con ampliar el cable del bus y conectar los nuevos
componentes.
Los captadores y actuadores se integran en un bus de comunicaciones, pero
en ese bus tambin estn los dispositivos inteligentes. Los captadores y
actuadores clsicos slo transmiten datos de entrada y reciben datos de salida.
Pero los dispositivos inteligentes necesitan ser programados, configurados y
testeados.
Los autmatas programables, los controles numricos, los controladores de
robots estn conectados en el bus a nivel de clula. Los intercambios de
informacin a este nivel consiste en el intercambio de datos y en el envo de
programas en tamaos que van desde Kbytes a Mbytes. El envo de estas
informaciones se realiza por medio de las funciones suministradas por el
protocolo de comunicaciones en pequeos paquetes.
En el campo de los captadores y actuadores el bus de comunicaciones debe
garantizar la transferencia cclica en un tiempo mximo de los datos de entrada
salida. El tamao de los datos que puede transmitir cada elemento de bus se
reduce drsticamente para garantizar la eficiencia de la comunicacin. El
intercambio de datos entre el autmata y los captadores y actuadores tiene
unos requisitos temporales muy fuertes. El Autmata debe leer todos los
captadores y escribir todos los actuadores en un tiempo inferior a un ciclo de
programa de Autmata.
Por lo tanto en el bus se deben transmitir dos tipos de datos: . Datos de
proceso o de entrada/salida. Parmetros o Mensajes.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
69
Datos de proceso
Los Datos de Proceso o datos de entrada-salida se caracterizan por su
influencia directa sobre el sistema controlado. Seales que actan sobre los
contactores, vlvulas, referencias, variables de proceso que son datos de
entrada/salida.
Los datos de entrada-salida de cada dispositivo no suelen tener una
complejidad muy alta, siendo en total de unos pocos bytes. De forma que se
puede conectar al bus un gran nmero de dispositivos de campo.
Los datos de proceso tienen un carcter cclico y deben ser continuamente
actualizados por medio del bus de comunicacin. Por ejemplo, para realizar
tareas de control automtico de procesos es necesario que las variables de
proceso sean ledas con un periodo de muestreo determinado. El clculo
correcto del control exige una transmisin de datos continua y realizable a
intervalos de tiempo iguales entre el sensor y la unidad de control. gualmente
habr una transmisin de datos con los mismos requerimientos entre la unidad
de control y el accionador del proceso. El tiempo de ejecucin de una tarea de
control programada en un autmata puede estar en tomo a los 5...10 ms. La
actualizacin de datos de entrada-salida en la red se realizar como mximo
cada 5 milisegundos para todos los dispositivos de la red.
Los datos de entrada/salida nicamente se identifican por la direccin del
dispositivo en la red. En la unidad de control existir una zona de memoria de
entrada que ser actualizada por la red de comunicacin (los datos de entrada)
y una zona de memoria de salida que ser actualizada por la tarea de control
del autmata y enviada mediante la red a los dispositivos de campo.
Parmetros o mensajes
Los parmetros tienen la funcin de ajustar, monitorizar y programar
dispositivos inteligentes. No disponen del carcter de informacin cclica que
tienen los datos de proceso. Esta informacin es transmitida solamente por
demanda y no de una manera recurrente. La transmisin de la informacin de
parmetros requiere una especial seguridad. El tamao de la informacin
paramtrica en el rea de los sensores y actuadores va desde 10 a 100 bytes
por dispositivo hasta 100 Kbytes para los programas de determinados
dispositivos inteligentes. Esta transmisin de datos no tiene apenas requisitos
de tiempo, pudiendo ser de 100 ms para la funcin de monitorizar y de varios
minutos incluso para la funcin de programacin. Debido a que los dispositivos
inteligentes pueden enviar y recibir un amplio rango de datos e informaciones,
un bloque de parmetros no solamente se identifica por la direccin del
dispositivo, sino que requiere informacin adicional que describa el tipo de
informacin.
PerfiIes
Estos dos tipos de datos descritos pueden ser utilizados en todos los
dispositivos sensores y actuadores. Los sensores y actuadores bsicos
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
70
(detectores de proximidad, contactores, etc.) pueden ser caracterizados
perfectamente por los datos de entrada- salida. Los dispositivos de campo
inteligentes, tales como servos, identificadores, controladores de robots, etc.,
necesitan los dos tipos de datos para ser caracterizados.
La descripcin completa de un dispositivo se conoce como perfil. En los buses
de campo se definen Perfiles para gran cantidad de dispositivos:
Mdulos de Entrada/salida digitales
Mdulos de Entrada/salida Analgicos
Mdulos funcionales
Variadores de frecuencia
Servomecanismos
Control de motores paso a paso
Arrancadores
Encoders
Sistemas de pesaje y dosificacin de productos
Resolvers
Plots de Lectura Escritura.
Lectores de cdigos de barras
Escners
Controladores de Posicin.
Sistemas de Soldadura
Controladores del Robot
Controladores multiprocesadores.
Comunicacin en eI Bus
Los mtodos utilizados en los buses de campo para actualizar los datos de
proceso o entrada/salida son:
Strobe
Peticin de informacin por parte del maestro y envo desde los dispositivos
esclavos. Muy eficiente para sensores.
Polling
El maestro enva informacin de salida al dispositivo y ste le responde con
la informacin de entradas
Cambio de estado
El dispositivo no transmite informacin hasta que se modifica el estado de
las variables. Muy eficiente en sistemas discretos.
Cclico
El dispositivo enva la informacin a la red en un intervalo de tiempo
prefijado.
Adems el bus de campo debe incorporar los servicios de comunicacin
necesarios para los procesos de configuracin, programacin y test del bus
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
71
TECNOLOGA DE LOS BUSES DE CAMPO
Los buses de campo se usan principalmente como un sistema de comunicacin
entre los sistemas de automatizacin y los dispositivos de campo. Las
aplicaciones basadas en buses de campo, en comparacin con los sistemas
tradicionales, reducen en un 40 % el coste de cableado, configuracin y
mantenimiento. Solamente dos cables son necesarios para transmitir toda la
informacin relevante en un proceso automatizado. No solamente los datos de
entrada y salida de los captadores y actuadores, sino adems los datos de
parametrizacin, datos de diagnstico y programas de aplicacin.
En la actualidad existen en el mercado gran cantidad de buses de campo
diferentes. Los buses de campo que se han impuesto en el mercado son los
que estn respaldados por las principales casas de Autmatas, como son
Profibus, Device Net y FPO. El bus Profibus est respaldado por el fabricante
alemn Siemens, Device Net est respaldado por Allen Bradley y el bus FPO
est respaldado por Telemecnica. Tambin se han impuesto en el mercado
buses como el AS-i creado por un consorcio de empresas y el bus nterbus
creado por Phoenix-Contact. En este tema se tratarn los siguientes buses de
campo:
AS-i
FPO
Profibus
nterbus
Los buses FPO, Profibus e nterbus se pueden definir como buses de campo
y clula. Permite la conexin de estaciones y de captadores y actuadores.
Existen pasarelas para conectar el bus AS-i a FPO, Profibus e nterbus. El bus
AS-i slo trabaja a nivel de captadores y actuadores, es un bus de campo que
se puede utilizar como sub-bus de los otros tres buses. En este caso el bus AS-
i acta como un simple nodo del bus de nivel superior.
EI bus AS-i
El Bus AS-i es un sistema de transmisin de datos y rdenes estndar para
sensores y actuadores. El concepto AS-i surgi en el Ao 1990 por iniciativa de
un grupo de unas diez empresas, en su mayora fabricantes de sensores y
actuadores. El objetivo del grupo era definir un sistema de comunicacin nico
para todos los fabricantes de sensores o actuadores, lo que determin la
denominacin AS-i (Actuator Sensor nterface). Dicho estndar permita una
descentralizacin de las funciones de inteligencia de los sensores y actuadores
a nivel de las clulas de produccin permitiendo un sencillo cableado con la
unidad de Control.
En 1992 se crea una asociacin de empresas encargada de coordinar la
produccin de componentes AS-i de las distintas empresas, dar a conocer el
concepto y expender certificados a los nuevos productos.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
72
En la actualidad, la asociacin AS-i rene a los lderes europeos del mercado
de sensores, actuadores, autmatas programables, sistemas de control y de
conctica. Cuenta con el apoyo de poderosas empresas de Alemania (lugar
donde naci la asociacin) y numerosos pases europeos (Francia, Espaa,
Pases Bajos, Suiza, etc.).
La misin de la asociacin AS-i consiste en:
Difundir el concepto AS-i a escala mundial.
Proporcionar a los usuarios informacin constante sobre los trabajos
relacionados con AS-i.
Trabajar en la elaboracin de los perfiles y especificaciones AS-i.
Certificar los productos adaptados a las normas unificadas AS-i.
Gestionar la normalizacin de dichas normas.
Certificacin de productos AS-i
La asociacin AS-i se encarga de homologar los productos que cumplen las
especificaciones AS-i. El certificado garantiza al usuario el correcto
funcionamiento del producto en una arquitectura AS-i, la posibilidad de operar
en asociacin con otros componentes AS-i y su intercambiabilidad funcional en
un bus AS-i.
En efecto, la normalizacin AS-i que ha emprendido la asociacin garantiza
que todos los productos con una gama de funciones similar, recogida en un
perfil funcional, podrn utilizarse indistintamente con un bus AS-i sin modificar
el programa aunque pertenezcan a fabricantes distintos.
Los productos certificados se identifican por la presencia de un logotipo AS-i y
los certificados se realizan en laboratorios autorizados por la asociacin AS-i.
Cuando los productos han superado todas las pruebas, la oficina de
certificacin expide al fabricante un certificado donde figuran la descripcin del
producto, las pruebas realizadas, su finalidad y el resultado de las mismas.
El certificado puede tener una validez limitada aunque se puede revisar en
caso de que las especificaciones AS-i cambien substancialmente o el
fabricante solicite una nueva certificacin. Todos los componentes AS-i se
pueden probar en los laboratorios autorizados, utilizando herramientas de
prueba especficas.
Las pruebas realizadas difieren en funcin del producto:
Elemento esclavo.
Elemento maestro.
Pasarela.
Alimentacin.
Repetidor.
Herramientas de parametrizacin (terminal de direccionamiento, etc.).
Herramientas de desarrollo.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
73
La obtencin de este certificado permite al fabricante comercializar un producto
fiable y garantizado, cuyos usuarios podrn utilizar sin riesgo alguno en una
arquitectura AS-i que cumple adems con las normas unificadas establecidas,
y que ofrece un mantenimiento fcil, una modularidad garantizada y la
posibilidad de modificaciones y ampliaciones rpidas y por tanto de coste
reducido.
Estructura interna deI bus AS-i
El AS-i es un Bus para sensores y Actuadores del tipo todo o nada con
topologa libre en lnea, en anillo, en rbol, etc. El tiempo de respuesta del bus
es muy breve, de menos de 5ms de ciclo como mximo para un mximo de 31
esclavos conectados. Permite realizar acciones reflejas a nivel de los
actuadores. El bus AS-i se puede conectar a autmatas programables dotados
de mdulo maestro AS-i, o bien mediante mdulos pasarela conectarlo a buses
de nivel superior como pueden ser el bus FPO, Modbus o Profibus.
PrincipaIes caractersticas y prestaciones
El bus AS-i es un bus de terreno que permite reemplazar los mltiples cables
utilizados para conectar los autmatas a los sensores y actuadores.
Fig. 5.6 Bus AS-i
El bus se gestiona a travs de un equipo maestro (mdulo de autmata)
conectado a equipos esclavos (actuadores/sensores o unidad de sealizacin).
Las principales caractersticas del bus AS-i son:
Posibilidad de conectar un mximo de 31 esclavos. Los esclavos pueden
ser interfaces de bus que permiten conectar varios actuadores/sensores.
Posibilidad de utilizar un cable plano cuyo perfil sirve como gua de
posicionamiento y recubrimiento autocicatrlzante en caso de retirada de
un equipo. Por dicho cable circulan la alimentacin y las seales.
Tiempo de escrutacin del conjunto de los esclavos de 5 ms como
mximo con una velocidad de transferencia de datos de 167 Kbits / s.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
74
Longitud de cable mxima de 100m por cada segmento de bus.
Las especificaciones de los componentes conectables al bus imponen una
cada de tensin mxima admisible de 3 voltios entre la alimentacin y el ltimo
esclavo. Para respetar esta condicin con una alimentacin de 2 A y dadas las
caractersticas del cable, ste no debe medir ms de 100 metros. Sin embargo,
se puede prolongar intercalando un repetidor en el cable.
PerfiIes
De los maestros
Las especificaciones AS-i definen determinadas funciones del bus AS-i
Lectura y escritura de las entradas/salidas.
Modificacin de los parmetros de los esclavos.
Test del bus.
Comprobacin de los esclavos presentes con respecto a una
configuracin de referencia.
Para que resulten ms econmicos y fciles de utilizar, muchos maestros AS-i
slo realizan la funcin de lectura y escritura de las entradas/salidas.
De los esclavos
Cada uno de los esclavos conectados al bus AS-i se puede identificar
perfectamente gracias a su cdigo identificador (dentification Code) y a su
configuracin de entrada/salida (l/O Code). Estos dos elementos determinan
el "perfil" del esclavo.
La descripcin detallada de dichos perfiles ofrece la ventaja de garantizar al
usuario la posibilidad de intercambiar las funciones de los productos AS-i. En
efecto, todos los equipos con el mismo perfil (y por tanto destinados a la misma
utilizacin) son intercambiables entre s, independientemente del fabricante de
cada uno.
Componentes bsicos deI bus AS-i
Chip ASIC
Los sensores y actuadores desarrollados para el bus AS-i disponen de un
circuito integrado especifico Asic (Aplication Specific ntegrated Circuit) que se
integra directamente en el sensor o accionador (componentes comunicantes).
Si se desean integrar en el bus sensores o actuadores estndar (finales de
carrera, fotoclulas, contactores.) se dispondr de una interfaz de conexin que
puede admitir hasta cuatro sensores y cuatro actuadores estndar
(componentes no comunicantes).
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
75
El ASC se encarga de gestionar todas las funciones del sensor o del
accionador para proporcionar al maestro AS-i informacin sobre el estado de
las entradas/salidas o bien comunicarle la disponibilidad de funcionamiento del
sensor o del accionador. Gracias a su reducido tamao, se puede integrar
fcilmente dentro del sensor o el accionador.
El bus AS-i admite hasta 31 esclavos. El esclavo AS-i viene equipado con el
chip Asic. Cada esclavo dispone de:
4 bits de entradas digitales
4 bits de salidas digitales
4 bits de parmetros
Los parmetros de funcionamiento, datos de configuracin, cdigos de
identificacin y direccin se guardan en memoria no voltil. Los bits de
entradas son adquiridos por el esclavo y enviados al maestro. Los bits de salida
son transmitidos por el maestro AS-i a los esclavos.
Los bits de parmetros del esclavo AS-i permiten al maestro AS-i transmitir
valores que no se interpretan como salidas. Estos parmetros se pueden
utilizar para el control y conmutacin de los modos de marcha internos para los
sensores y actuadores. Por ejemplo, en una salida motor se puede controlar el
sentido de giro, el rearme de las protecciones. En un sensor permite controlar
los cambios de escala de sensibilidad, las temporizaciones especficas, etc.
TerminaI de direccionamiento
A los captadores y actuadores comunicantes se les debe configurar la direccin
que tienen en el bus, es decir, su nmero de esclavo, esto se efecta mediante
una terminal de direccionamiento.
Fig. 5.7 Terminal de direccionamiento del bus AS-i
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
76
CabIe de bus
El cable del bus transmite la informacin y la alimentacin a 24 voltios de
continua para los sensores y actuadores (esta tensin deber ser suministrada
por una fuente de alimentacin especfica AS-i). Consta de dos hilos sin trenzar
y sin apantallar, de seccin de 1,5 a 2,5 mm
2
.
Pueden ser cables redondos clsicos o cables especficos AS-i. Estos ltimos
permiten realizar un cableado ms rpido y fiable de todos los componentes del
Bus AS-i.
Tipos de cables disponibles:
Cable AS-i
Cable redondo estndar
Cable de alimentacin auxiliar negro AS-i
Fig. 5.8 Cable plano AS-i con gua
El Cable AS-i es un cable plano de dos conductores y en el perfil tiene una
muesca que impide que se invierta la polaridad en la conexin de los
componentes. El cable plano no est apantallado. Es de color amarillo y cada
segmento puede tener una longitud mxima de 100 m. Se puede aadir al
primero otro segmento de 100 m intercalando un repetidor que vuelva a
generar la seal.
El cable transmite las seales y la corriente continua 24 V. que alimenta los
sensores y actuadores, siempre que stos no consuman ms ,energa de la
que puede suministrar la fuente de alimentacin del bus. Los hilos pueden
tener una seccin de 0.75 (para una longitud de cable de 50 m como mximo),
de 1.5 o de 2.5 mm2.
La conexin de los componentes al cable de bus se realiza mediante una toma
vampiro que penetran en el cable. Si se desconecta el componente, el cable se
auto regenera.
Las propiedades fsicas del recubrimiento permiten que los taladros de las
tomas vampiro se cierren hermticamente cuando stas se retiran. Gracias a
este tipo de recubrimiento, llamado "auto cicatrizante", los componentes del
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
77
bus se pueden aadir o retirar con mayor comodidad. El proceso de conexin
es, en efecto, muy rpido, ya que las tomas vampiro perforan el recubrimiento
aislante y establecen el contacto, garantizando una conexin muy fiable. Este
sistema aporta una mayor flexibilidad a la instalacin, ya que permite modificar
la posicin de los sensores y la de los actuadores para que se adapten a la
configuracin de la mquina.
Fig. 5.9 Conexin de un Mdulo de usuario
Fuentes de AIimentacin
Las fuentes de alimentacin del bus AS-i son fuentes especficas. No se
pueden utilizar fuentes de alimentacin estndar. Al conectar un mdulo de
salidas o un accionador donde existan grandes consumos de corriente es
necesario conectar tambin el cable negro y una fuente auxiliar de
alimentacin.
La fuente de alimentacin especfica para el bus se utiliza para alimentar los
componentes conectados al bus de campo AS-i. La fuente est equipada con
un circuito desacoplador que permite superponer la tensin de alimentacin a
los datos propios del bus.
La distribucin de esta potencia se realiza por los mismos hilos que los
utilizados en el intercambio de datos (cable amarillo), a no ser que sea
necesaria una alimentacin auxiliar, en cuyo caso se debe disponer de una
fuente de alimentacin suplementaria. Esta alimentacin auxiliar es necesaria
debido al alto consumo de corriente de algunos componentes del bus AS-i,
como puedan ser las derivaciones a motor o los arrancadores en cofre. La
alimentacin Auxiliar se realiza mediante un cable auxiliar AS-i negro.
La utilizacin de dispositivos electrnicos proporciona una proteccin total
contra las sobrecargas y los cortocircuitos de salida, con arranque automtico
al desaparecer el defecto.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
78
Repetidor
La longitud mxima del Bus AS-i es de 100 m, incluidas las ramificaciones
principales y derivaciones. Se puede prolongar otros 200 m utilizando
repetidores. El repetidor no ampla el nmero mximo de esclavos
direccionables. Se pueden conectar esclavos a ambos lados del repetidor y se
requiere fuente de alimentacin.
Fig. 5.10 Repetidor AS-i
Existe una separacin galvnica entre ambos segmentos del cable de la
interfaz AS-i. Existen dos led que indican alimentacin correcta para cada uno
de los segmentos de la interfaz AS-i.
Fig. 5.11 Repetidor en una red.
Extendedor
El maestro se puede conectar a una distancia de hasta 100 m del segmento del
interface AS-i. No se ampla nmero mximo de esclavos direccionables por
maestro. Los esclavos slo se pueden conectar por detrs del extendedor. Slo
es necesaria fuente de alimentacin de la interfaz AS-i por detrs del maestro.
La alimentacin del maestro se realiza a travs del extendedor desde el
segmento donde estn los esclavos. No existe una separacin galvnica entre
ambos tramos del cable.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
79
Fig. 5.12 Extendedor
Maestros deI bus AS-i
El bus AS-i admite varios tipos de maestros:
Maestro Autmata programable con comunicacin AS-i incorporada, de
manera que es transparente al programa del autmata.
Maestro pasarela. Transforma el bus AS-i en un simple nodo de
comunicacin de un bus de nivel superior. Existen maestros pasarelas
para los buses FPO, Modbus, Profibus, nterbus.
El maestro del bus AS-i contiene campos de datos en los que se definen la lista
de los esclavos conectados y las imgenes de los datos de entrada-salida. Esta
informacin se almacena en memoria voltil.
Datos de E/S: imgenes de las 124 entradas y de las 124 salidas del bus
AS-i.
Parmetros: imgenes de los parmetros de todos los esclavos.
Configuracin/identificacin: contiene todos los cdigos l/O y los cdigos
de identificacin de todos los esclavos detectados en el bus.
El AS-i es un bus con un maestro nico que se encarga de gestionar la
comunicacin con los esclavos. El maestro pregunta sucesivamente a cada
esclavo y espera la respuesta. El ciclo de escrutacin dura cmo mximo 5 ms
con 31 esclavos conectados. Ningn esclavo tiene la iniciativa del dilogo, sta
siempre es del maestro.
El autmata TSX 37 Micro con un acoplador TSX ASZ 10 es un maestro del
bus AS-i. En las figuras siguientes se observa la configuracin de un mdulo
TSX ASZ 10 en el autmata TSX Micro. En el mdulo se pueden configurar
hasta 31 esclavos, para lo cual se dispone de una serie de perfiles estndar
que definen distintos tipos de esclavos AS-i.
Las familias de esclavos disponibles son:
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
80
Arrancadores
Balizas Luminosas
Cajas de Conexin
Detectores Capacitivos
Detectores Fotoelctricos
Detectores nductivos
Detectores de Posicin
Elementos de Mando y sealizacin.
Productos comunes.
Teclados
En los autmatas Siemens se pueden conectar mediante nterfaces maestro
los siguientes modelos
SMA TC S5 90U, 95U, 100U y ET 200
SMA TC S5 115U, 135U, 155U
SMA TC S7-300
SMA TC S7-200
Mdulos de Periferia ET 200U, ET 200X y ET 200M
Tambin mediante un mdulo pasarela se puede conectar a Profibus.
Fig. 5.13 DP/AS interface para Profibus-DP
Intercambios entre maestro y escIavos
Los intercambios entre maestro y esclavo incluyen la pregunta del maestro y la
respuesta del esclavo.
Estas preguntas/respuestas son tramas de dimensiones reducidas y longitud
fija, llamadas telegramas, que recogen informacin til como la direccin del
esclavo, el valor de sus entradas/salidas, su identificacin (perfil), su estado,
etc. Toda esta informacin resulta accesible a travs de los servicios de
lectura/escritura de datos, lectura de status, lectura de identificacin,
asignacin de direccin, etc. del maestro AS-i.
El protocolo AS-i se basa en el funcionamiento en "polling" maestro/esclavo. El
maestro interroga a los esclavos por turno y de forma cclica.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
81
Adems de estos intercambios de datos, que representan el funcionamiento
nominal del bus, existen otros intercambios, de tipo no cclico, que gestiona el
maestro, para tener en cuenta los cambios de configuracin o incluso las fases
de arranque del bus.
Normalmente, el maestro AS-i, desde la puesta en tensin del bus, gestiona las
siguientes etapas principales:
nicializacin
Durante esta fase, todos los buffers del maestro estn en su estado inicial.
Entre los buffers destacan dos tablas de imgenes de las entradas/salidas
y, sobre todo, tres tablas sobre:
1. La lista de los esclavos detectados en el bus.
2. La lista de los esclavos proyectados, es decir, los esclavos identificados
en la configuracin de referencia del maestro.
3. La lista de los esclavos activos, es decir, aquellos que pueden
intercambiar informacin con el maestro.
Arranque
En esta etapa se detectan los esclavos conectados al bus; el maestro los
memoriza en la lista de esclavos detectados. A continuacin, el maestro
compara el perfil de estos esclavos reconocidos con la configuracin de
referencia del maestro (esclavos proyectados) y elabora la lista de esclavos
que deben ser activados, es decir, aquellos con los que puede dialogar
(esclavos activos).
ntercambios
Finalmente, cuando concluye la fase de activacin, el sistema se encuentra
en estado de funcionamiento normal, que corresponde al intercambio cclico
de informacin entre el maestro y los esclavos. Durante esta fase cclica de
intercambios, el maestro puede enviar una trama especfica de . control a
un nico esclavo.
Solo se puede transmitir un comando de control por ciclo, 10 que permite al
maestro realizar acciones especficas sobre los esclavos. Estos comandos
corresponden a envo de parmetros, asignacin de direcciones, etc. En
definitiva, en cada ciclo intercambia informacin el maestro con todos los
esclavos, pero en un solo ciclo s610 se transmite un comando de control. Este
principio permite, si es necesario, que el maestro tenga en cuenta
automticamente cualquier cambio de configuracin.
EscIavos deI bus AS-i
Los esclavos pueden ser conectados al bus AS-i de tres formas distintas:
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
82
Actuadores/sensores convencionales no comunicantes
Se conectan al bus a travs de una interfaz AS-i (repartidor o interfaz bus
de entradas/salidas TON). Estas interfaces se utilizan para conectar
sensores binarios (sensor inductivo, ptico, capacitivo, final de carrera, etc.)
o actuadores binarios (lmpara, rel, electrovlvula, etc.) y proporcionar a
los actuadores/sensores convencionales capacidad de dilogo en AS-i.
Actuadores/sensores convencionales comunicantes
Se conectan directamente al bus a travs de una interfaz dedicada AS-i
independiente. Estos elementos incluyen el componente ASC que permite
que el accionador/sensor se convierta en comunicante.
Actuadores/sensores comunicantes (AS-i dedicados)
Se conectan directamente al bus. El propio sensor incluye un ASC, por lo
que se puede conectar directamente al bus AS-i.
En los tres casos el nmero mximo de productos con componente ASC
integrado que se pueden conectar al bus es de 31. Por tanto, el nmero total de
entradas/salidas del bus depender de las entradas/salidas de cada uno de los
productos conectados.
Existen dos tipos de repartidores:
Repartidores activos.
Con circuito integrado AS-i, que permiten conectar sensores/actuadores
convencionales. Los sensores o actuadores estndar se conectan al bus
AS- i mediante repartidores activos o interfaces de conexin, los cuales
contienen chip Asic. Se pueden conectar un total de 248 sensores o
actuadores estndar al bus AS-i.
Repartidores pasivos
Carecen de componentes electrnicos y permiten conectar sensores y
actuadores comunicantes (con componente ASC integrado). Los sensores
y actuadores comunicantes (con Asic) se conectan directamente en el bus
AS-i a travs de repartidores pasivos o tes de conexin pasivos. Por lo tanto
se puede conectar hasta un mximo de 31 sensores o actuadores
comunicantes. Los repartidores y tes de conexin pasivos no contienen chip
Asic. Sirven para hacer derivaciones o componentes comunicantes.
Los repartidores se componen de dos partes:
La parte inferior, llamada "mdulo de conexin", que forma la interfaz
elctrica con el cable AS-i.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
83
La parte superior, llamada "mdulo de usuario", que se elige en funcin
de la aplicacin, y puede ser simplemente una tapa, un mdulo de
usuario activo (que permite conectar hasta cuatro sensores/actuadores
estndar) o un mdulo de usuario pasivo, que permite conectar hasta
cuatro conexiones (sensores o actuadores comunicantes).
Fig. 5.14 Conexin de un mdulo de usuario
El mdulo de usuario activo integra el circuito integrado AS-i. El mdulo de
usuario pasivo slo incluye conexiones elctricas. En un bus con repartidores
pasivos, a cada sensor o accionador corresponde una direccin (31 sensores o
actuadores como mximo).
Para efectuar derivaciones a componentes comunicantes se utilizan las
llamadas tes de conexin.
Fig. 5.15 Te de conexin
MduIos de Usuario
Los mdulos de usuario permiten la conexin de captadores y actuadores. Los
mdulos de usuario activos son esclavos AS-i. Permiten la conexin de
captadores y actuadores estndar (no comunicantes). Permiten la conexin de
un mximo de 4 entradas (captadores) y 4 salidas (actuadores). Los Mdulos
de usuario pasivos (no contienen chip Asic) permiten la conexin de captadores
y actuadores AS- i (comunicantes).
Adoptan varios formatos. Los ms comunes son:
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
84
Mdulos de usuario de 4 vas con diferentes combinaciones
2 entradas y 2 salidas
4 entradas
4 salidas
Mdulos de usuario de cuatro entradas y cuatro salidas
Las vas de entrada son a 24 V cc. Las vas de salida pueden ser a rel o a
transistor.
MduIo compacto 4E/4S
Permite la conexin de actuadores y sensores estndar sobre conector M12.
Tiene cuatro vas de entrada y cuatro de salida. Las Entradas tienen un
consumo de 200 mA, Y la salidas pueden soportar un mximo de 2 A. La
Tensin de alimentacin a los sensores y a la electrnica se recibe a travs del
cable de AS-i amarillo. La tensin de alimentacin auxiliar para actuadores se
recibe a travs del cable de AS-i negro. Tiene incorporada la funcin de
diagnstico a travs de dos leds que indican: presencia de tensin,
comunicacin, sobrecarga de entradas o salidas. Vigilancia de defecto a tierra
integrada
MduIo 4E/4S 230 V para derivaciones a consumidor
Este mdulo dispone de 4 entradas para la conexin de dispositivos de
deteccin electromecnicos o detectores de proximidad inductivo de dos hilos.
Dispone de 4 salidas de rels que soportan hasta 230V el paso de 2 A. La
Alimentacin de las salidas se realiza mediante tensin externa de 230 V. AC
por medio del cable auxiliar AS-i rojo. El Grado de proteccin es P 20.
Mediante este mdulo se pueden realizar 4 arranques directos o dos
inversores.
Soporte de aparatos para 2 4 derivaciones a motor
Para montar aparatos estndar sobre perfil como son contactores y rels
trmicos estndar. Permite la Conexin de hasta 4 derivaciones a motor.
Dispone de 2 (4) entradas, y 2 (4) salidas de rels con caractersticas 2 A Y
230V. La Tensin auxiliar de 230V se suministra mediante el cable de
alimentacin AS-i rojo. La conexin al bus AS-i se realiza mediante el cable
perfilado amarillo
Al ser una salida motor compacto conlleva la reduccin del cableado, as como
la Reduccin de armarios de preactuadores por medio de la utilizacin de
unidades descentralizadas. Se reducen los tiempos de montaje y puesta en
marcha. Permite la utilizacin de contactores estndar con tensiones de 230 V
AC.
Mediante las derivaciones a motor se pueden realizar arranques directos o
inversores.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
85
2E/1S (1 arranque directo)
4E/2S (1 inversor /2 arranques directos)
A las derivaciones a motor se les puede dotar de arrancador electrnico para
efectuar arranques y paradas con rampas de aceleracin y deceleracin
programadas.
MduIo neumtico 4E/4S
Mdulo de usuario permite el control directo de accionamientos neumticos.
Permite el control de dos cilindros mediante 4 salidas neumticas. El Mdulo
dispone e entrada para alimentacin neumtica exterior. La posicin del cilindro
se detecta mediante 2 entradas binarias.
Detectores de proximidad inductivos
Estos aparatos detectan cualquier objeto metlico y proporcionan informacin a
1S funciones de control de presencia/ausencia de objeto.
Estos detectores sealizan la deteccin del objeto fuera de los lmites de la
zona de deteccin (presencia del objeto en los lmites de la zona de deteccin.
Entre 0.8 y 1.2 del alcance nominal). ncluyen una funcin de diagnstico que
permite localizar e forma rpida el detector a travs del LED amarillo
intermitente.
Este tipo de componentes pueden ser conectados al bus a travs de
repartidores pasivos o por medio de "tes de conexin".
Arrancadores de motor en cofre
Los arrancadores en cofre que se conectan al bus AS-i estn diseados como
equipos elctricos descentralizados: los arrancadores se instalan 10 ms cerca
posible de los motores controlados.
La descentralizacin de los arrancadores permite obtener un ahorro
significativo en la distribucin de la potencia. La potencia se distribuye a travs
de canalizaciones prefabricadas o cables.
Los arrancadores incluyen todas las funciones necesarias para controlar los
motores (mando, proteccin, seccionamiento, etc.).
Un arrancador de motor en cofre est compuesto de:
Un disyuntor magnetotrmico.
Un contactor (un sentido de marcha) o un contactor-inversor (dos
sentidos de marcha) de bajo consumo.
Un dispositivo de control electrnico.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
86
Los arrancadores directos e inversores en cofres estancos (1P54 e 1P65) estn
principalmente pensados para motores alternos trifsicos hasta 4 KW en 400 V.
En caso de sobrecarga, hay que esperar a que se enfre el motor para proceder
al rearme del disyuntor magnetotrmico. Dicho rearme se efectuar pulsando el
mando habilitado a tal efecto.
El bus de comunicacin AS-i suministra una alimentacin de 30 V. El bus AS-i
alimenta los componentes electrnicos del arrancador. En general, un
arrancador integra uno o dos contactores (para uno o dos sentidos de marcha
respectivamente).
Las bobinas de estos contactores se pueden alimentar de dos formas:
A travs del bus AS-, S el consumo maxlmo es de 30 mA.
A travs del circuito de alimentacin auxiliar de 24 voltios en continua, si
el consumo mximo es de 90 mA.
MduIos especiaIes
Algunas casas como Siemens han sacado al mercado mdulos que incorporan
funcionalidades para las que en principio no estaba previsto el Bus AS-i. Son
los mdulos de entradas-salidas analgicas, los mdulos de 16 entradas y los
mdulos contadores. La lectura de estos mdulos slo puede ser realizada por
un autmata Siemens maestro del bus que disponga de bloques funcionales
(FBs) especficos para el tratamiento del intercambio de datos con estos
mdulos.
Mdulos analgicos
La resolucin de estos mdulos es de 12 Bit. Como un esclavo AS-i slo
dispone de 4 bits de entrada y 4 bits de salida. La transmisin del valor
analgico se realiza en varios ciclos del bus. La lectura de las entradas
analgicas y la escritura de salidas analgicas en el Maestro debe ser
realizada mediante FBs en el programa de aplicacin del autmata.
Permiten la conexin de hasta 2 entradas 2 salidas analgicas con grado
de proteccin 1P67. Los rangos de las entradas analgicas son 0 ... 20mA,
0... 10V, PT 100. Los rangos de las salidas son 0... 20mA, 0 ... 10V.
Mdulo de 16 Entradas digitales
Permite la conexin de un mximo de 16 seales de entrada. En cada ciclo
el maestro consulta un grupo de 4 entradas. La Lectura de las entradas se
realiza desde el Autmata Siemens mediante bloques funcionales FBs.
En la extensin de la tecnologa AS-i, la versin de AS-i interfaz 2.1, se da
soporte a los mdulos analgicos, adems se ampla el nmero de esclavos a
62 y se distingue entre fallos de los perifricos y fallos de transmisin
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
87
MduIos de proteccin
MduIo de deteccin de defecto a tierra
Este mdulo detecta las derivas a tierras que pueden ocurrir en un bus AS-i. Es
suficiente con disponer de un mdulo por cada bus AS-i. El- Mdulo detecta los
siguientes tipos de defectos a tierra.
Defecto a tierra en cable AS-i.
Defectos a tierra en captadores alimentados por el cable AS-i.
Defectos a tierra en Actuadores alimentados por el cable AS-i.
Cuando se detecta el defecto a tierra un rel interno del mdulo conmuta, esta
salida puede servir para dejar sin alimentacin todo el bus AS-i. El defecto a
tierra es memorizado por el mdulo. El mdulo puede ser reseteado por dos
mtodos.
Presionando el botn de reset durante dos segundos.
Aplicando 24 voltios a la entrada de reset del mdulo.
El reset solo se puede realizar cuando el defecto a tierra ha
desaparecido
MduIo de proteccin contra sobretensiones
Las sobretensiones elctricas son una de las causas que daan los sistemas
elctricos y electrnicos. Pueden provenir de descargas atmosfricas, de
contactos con cables de potencia de los actuadores, o de sobretensiones
producidas en las redes de transporte de energa elctrica. Es necesario que el
bus AS-i sea protegido contra sobretensiones, para 10 cual dispone del mdulo
de proteccin contra sobretensiones. Las sobretensiones son derivadas a tierra
mediante un cable que est permanentemente fijado en el mdulo y cuyo
extremo se debe fijar a tierra de la instalacin elctrica.
TopoIoga deI bus AS-i
La topologa del bus AS-i admite cualquier arquitectura (en estrella, en anillo,
en rbol) y se pueden aadir ramificaciones desde cualquier punto sin que
sean necesarios terminadores o adaptadores. Esto permite realizar conexiones
ms directas entre el bus y los diferentes sensores y actuadores.
Los aparatos se pueden situar en cualquier punto del cable sin condicionantes
de ningn tipo (excepto la longitud mxima de 100 metros), lo que permite una
distribucin ptima de los sensores y actuadores.
Entre las topologas posibles ms utilizadas destacamos:
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
88
En lnea
Fig. 5.16 Conexin en lnea
En estrella
Fig. 5.17 Conexin en estrella
La conexin de los segmentos AS-i al mdulo maestro AS-i se realiza
atornillando los dos hilos de cada segmento a las bornas del maestro AS-i.
Se recomienda situar la alimentacin lo ms cerca posible de los esclavos que
consuman ms energa.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
89
La longitud total, resultante de la suma de las diferentes ramas, no debe ser
superior a 100 metros. El nmero mximo de esclavos es siempre 31. Esta
topologa es aconsejable para instalaciones con aparatos dispuestos en
bloques aislados.
Cada punto de conexin est dispuesto linealmente a 10 largo de todo el cable.
En rbol
Fig. 5.18 Conexin en arbol
Esta estructura requiere la utilizacin de repartidores o elementos de derivacin
para realizar las ramificaciones. Como en los casos anteriores, la suma de
todos los segmentos AS-i, incluidas las derivaciones y los cables de conexin
entre el repartidor y accionadorlsensor AS-i, no debe ser superior a 100 metros.
En anillo
Fig. 5. 19 Conexin en anillo
En este caso, el permetro no debe ser superior a 100 metros.
A continuacin se muestran dos ejemplos de instalacin del bus AS-i.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
90
Fig. 5.20 Primer ejemplo de bus AS-i
1. Maestro del bus AS-i. Autmata TSX Micro con acoplador TSX SAZ 10.
2. Fuente de alimentacin de 24 Voltios para el bus AS-i.
3. Fuente de alimentacin de 24 Voltios auxiliar para los actuadores con
alto consumo de corriente.
4. Repartidor pasivo que permite conectar los dos cables AS-i amarillos
con tomas vampiro.
5. Repartidor activo que permite conectar dos captadores y dos actuadores
estndar.
6. Repartidor activo que permite conectar cuatro captadores.
7. Arrancador de motores asncronos (comunicante).
8. Derivacin de conexin al bus con toma vampiro, conexin al sensor o
accionador por cable 2*0.34 mm2 con conector M12 recto.
9. Final de Carrera estndar.
10. Detector de proximidad inductivo estndar.
11. Detector de proximidad inductivo AS-i.
12. Detector fotoelctrico AS-i.
13. Contactor y rel trmico estndar.
14. Cable amarillo de alimentacin y datos del bus AS-i.
15. Cable negro de alimentacin Auxiliar
En el ejemplo de la Figura el maestro es un autmata TSX Micro con un
mdulo TSX ASZ 10. En el bus se dispone de dos fuentes de alimentacin. La
segunda es necesaria para garantizar la potencia a los actuadores. El cable
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
91
negro de alimentacin auxiliar slo se lleva a los esclavos cuyas salidas
consuman mucha potencia.
En el segundo ejemplo el bus AS-i est conectado como bus de menor nivel del
bus FPO. La conexin se realiza mediante un mdulo pasarela TBX SAP 10.
Fig. 5.21 Segundo ejemplo de bus AS-i
La segunda fuente de alimentacin es necesaria para alimentar las salidas
motor.
1. Gestor del bus FPO. Autmata TSX Premium.
2. Autmata TSX Micro, agente del bus FPO.
3. Terminal grfico Magelis, agente del bus FPO.
4. Cable del bus FPO.
5. Mdulo pasarela FPO- AS-i TBX SAP 10, maestro del bus AS-i.
6. Fuente de alimentacin de 24 Voltios para el bus AS-i.
7. Fuente de alimentacin de 24 Voltios auxiliar para los actuadores con
alto consumo de corriente.
8. Repartidor pasivo que permite conectar los dos cables AS-i amarillos
con tomas vampiro
9. Caja de dos pulsadores AS-i.
10. Detector fotoelctrico AS-i.
11. Detector de proximidad inductivo AS-i.
12. Tes de conexin al bus con toma vampiro.
13. Teclado de 12 teclas de efecto tctil.
14. Soporte de aparatos para cuatro derivaciones a motor.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
92
InstaIacin industriaI cabIeada mediante bus AS-i.
El bus AS-i slo puede distribuir los captadores y actuadores de tipo todo o
nada. En cambio, los variadores de velocidad se deben controlar por medio de
entradas-salidas digitales y salidas analgicas. Estos actuadores debern estar
en el armario del autmata o en un armario de preactuadores, efectundose su
mando mediante un cableado hilo a hilo.
EI bus FIPIO
El bus FPO es un bus industrial abierto conforme a la norma FP. La norma
FP est impulsada por fabricantes y organismos industriales franceses. El bus
FPO est impulsado principalmente por el fabricante de autmatas
Telemecanique.
El bus FPO necesita un elemento Gestor del bus, este elemento gestor debe
ser un autmata Telemecnica de la gama Premium TSX/PMX/PCX 57 i5.
El bus permite que se conecten hasta un mximo de 127 agentes. La direccin
O est reservada al gestor y la direccin 63 a la terminal de programacin. El
bus permite la gestin como mximo de 32 agentes por segmento de bus.
Los dispositivos que se pueden conectar como agentes al bus FPO son:
Autmatas TSX Micro o Autmatas Premium.
Mdulos de entradas/salidas distantes TBX Todo o Nada y Analgicas. .
Mdulos Pasarela FPO / AS-i TBX SAP 10.
Entradas Salidas Momentum Todo o Nada, analgicas y especiales
(contaje rpido).
Variadores de velocidad ATV 16, ATV 66.
Terminales de Explotacin y visualizacin CCX 17.
Terminales de Explotacin y visualizacin Magelis.
Perfiles Estandars FPO provenientes de desarrollos de otros
fabricantes como son: Festo, Joucomatic, Kuka, Parker / Hms, Aro,
Bosch,G Renault, Eca, Datalogic .
El nmero de agentes tambin depende de la capacidad del equipo gestor. Es
decir, de la memoria RAM que dedique el equipo a gestionar el sistema flp.
Dependiendo del tipo de agente conectado se ocupa ms o menos memoria
del sistema FP. Por ejemplo el TSX 57 35 puede gestionar 98 Momentum TOR
50 Momentum analgicos 59 ATV 16 como mximo.
En la direccin 63 se conecta la terminal de programacin del bus. Mediante
esta terminal se pueden acceder a todos los servicios, como son la carga y
descarga de aplicaciones en los autmatas agentes, la configuracin de los
mdulos; excepto a la carga de la aplicacin en el autmata gestor.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
93
Fig. 5.22 Equipos conectables al bus FPO
Configuracin deI gestor deI bus
En la configuracin del autmata gestor hay que definir los equipos agentes
que se conectan al bus.
Fig. 5.23 Configuracin del bus Fipio
En las siguientes imgen se visualiza la configuracin de un mdulo de
entradas-salidas analgicas.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
94
Fig. 5.24 Configuracin de un mdulo de i/o analgicas
El direccionamiento de los objetos entrada/salida utilizado en el bus Fipio es
topolgico.
Por ejemplo:
% 1 \ 0.2.1 \ 0.7 entrada digital 7 del modulo conectado en primer lugar
con direccin 1.
% 1 \ 0.2.1 \ 1.8 entrada digital 8 del modulo de extensin con direccin
1.
%Q \ 0.2.2 \ 0.5 Salida digital 5 modulo direccin 2.
%1 \ 0.2.10 \ O.MOD.ERR bit de fallo mdulo con direccin 10.
%1 \ 0.2.11 \ 0.7 .ERR bit de fallo de la va 7 mdulo con direccin 11.
Comunicacin con Ios autmatas agentes
La comunicacin entre el autmata gestor y los agentes del bus se realiza
mediante palabras de entrada %W y palabras de salida %QW. Estas palabras
de entrada salida son vistas desde los autmatas agentes como palabras
internas del tipo %MW. Cada autmata FPO Agent utiliza 64 palabras
consecutivas %MW para el intercambio de los datos peridicos. Las 32
primeras palabras estn reservadas para transmitir las informaciones al
administrador, las 32 palabras siguientes estn reservadas para recibir las
informaciones.
Los autmatas Agentes se conectan al bus por medio de una tarjeta de
comunicaciones en cuya configuracin se define el nmero de punto de
conexin y la direccin de inicio de la tabla de 64 palabras para comunicacin
con el autmata gestor.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
95
Para comunicarse con el autmata agente conectado en la direccin 1. El
autmata agente escribe en palabras internas %MWlOO a %MW31 que se
transmiten a palabras de entrada %W en el autmata gestor.
%MWlOO %W\O.2.\O.O.O
%MW115 %W\O.2. 1\0.0. 15
%MWl16 %W\O.2.l\0.1.0
%MW13l %W\O.2.l\0.1.15
El autmata gestor escribe en las palabras de salida %QW que se transmiten
8, palabras internas en el autmata agente %MW.
%QW\O.2.1\O.O.O %MW132
%QW\O.2.1\O.O.15 %MW147
%QW\O.2.1\O.1.0 %MW148
%QW\O.2.1\O.1.15 %MW163
Servicios que suministra eI bus FIPIO
La velocidad de transmisin del bus es de 1Mbit /segundo. Debido a su elevado
flujo el bus FPO no constituye en general un freno a las prestaciones de una
aplicacin.
Funcionamiento de Ia comunicacin en eI bus
Una vez configurado el modo FPO, el procesador escruta los diferentes
equipos de la aplicacin segn la configuracin del bus definida mediante el
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
96
software PL7-PRO. Las caractersticas de esta tabla dan los siguientes
resultados:
Las variables imgenes de los valores de entradas y de los controles de
salida de un equipo configurable son escrutados lo ms rpidamente
posible en el bus, respetando los informes existentes entre los periodos
de las diferentes tareas que utilizan estos equipos.
La aparicin o desaparicin de un equipo configurado se detecta en el
bus en un tiempo mximo de:
- 100 ms si la configuracin consta de 2 a 16 equipos.
- 200 ms si la configuracin consta de 17 a 32 equipos.
- 400 ms si la configuracin consta de 33 a 64 equipos.
La aparicin o desaparicin de un equipo no configurado se detecta en
el bus en un tiempo mximo de 1 segundo.
Las variables de parametrizacin y de configuracin de los equipos
conectados al bus se transmiten a iniciativa del procesador: el volumen
de intercambio est limitado a 5 variables por segundo.
Las transmisiones se realizan con una cadencia de 20 mensajes UN-
TE por segundo.
El tiempo de ciclo de red (Tcr) corresponde al tiempo que separa dos'
interrogaciones consecutivas de un mismo punto de conexin del bus FPO. El
valor del tiempo de ciclo de red Tcr, en el caso de una aplicacin en la que
todos los mdulos E/S TBX TON estn configurados como tarea maestra
MAST, se define con la siguiente frmula:
Tcr_mast (ms) = 1 + 0,5 x nb. puntos de conexin TBX
Este clculo tiene en cuenta 20 mensajes aplicacin por segundo (servicio UN-
TE o aplicacin a aplicacin).
Para calcular los tiempos de transferencia correspondientes al tiempo que
separa la aparicin de una informacin TON en una entrada TBX y su
disponibilidad en una salida TBX, adems del tiempo de ciclo de red, es
necesario tener en cuenta los siguientes parmetros:
Tiempo de filtrado o de respuesta de los mdulos TBX.
Tiempo de tratamiento del procesador TSX/PMX.
Estructura software de la aplicacin y periodo de las tareas de programa.
TopoIoga
La topologa del bus consiste en el enlace de equipos mediante el
encadenamiento o derivacin. El nmero de segmentos es ilimitado en el caso
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
97
de arquitectura arborescente. Est limitado a 4 repetidores en cascada, es
decir 5 segmentos en cascada. La longitud de bus es:
1 Km sin repetidor
5 Km con 4 repetidores elctricos FP ACC 6 (5 segmentos de 1 Km)
15 Km con 4 repetidores pticos (5 segmentos de 3 Km)
Los repetidores pticos se utilizan en aplicaciones repartidas en grandes
superficies, en aplicaciones sometidas a entornos elctricos severos, en
Grandes instalaciones pblicas o industriales, en tratamiento y distribucin de
agua. La distancia mxima entre los repetidores pticos es de 3 Km. El nmero
mximo de repetidores es de 20.
InstaIacin industriaI cabIeada mediante bus FIPIO
Al utilizar el bus FPO se pueden distribuir tanto las entradas/salidas digitales,
como los variadores de velocidad, como las terminales de visualizacin... En la
instalacin ejemplo se han distribuido mdulos de entradas/salidas distantes.
Los captadores sern cableados hilo a hilo a las entradas digitales del mdulo.
De las salidas digitales se cablear hilo a hilo a los preactuadores. Los
preactuadores debern situarse en los armarios distribuidos o en las mquinas.
En cambio los variadores de velocidad se conectan directamente al bus.
Otra opcin existente es utilizar pasarelas de bus AS-i. Los captadores y
actuadores de tipo todo o nada se conectaran al bus AS-i. Los variadores de
velocidad y las terminales de visualizacin se conectaran al bus PPO
Profibus
La base del estndar Profibus fue un proyecto de investigacin (1987-1990)
llevado a cabo entre los aos 1987-1990 por los siguientes participantes: ABB,
AEG, Bosch, Honeywell, Kckner-Moeller, Landis & Gyr, Phoenix Contact,
Rheinmeta11, RMP, SauterCumulus, Scheicher, Siemens y cinco institutos
alemanes de investigacin.
De este proyecto se concluy el primer borrador de la norma DN 19245, el
estndar Profibus, partes 1 y 2. La parte 3, ProfibusDP, se defini en 1993.
Actualmente, Profibus en sus tres versiones FMS, DP y PA, son estndar
europeo EN 50170.
Actualmente hay instalados ms de dos millones de equipos en ms de
200.000 aplicaciones. Con ms de 1.600 productos disponibles. Hay
aproximadamente 250 fabricantes de productos Profibus en todo el mundo.
Existen dos asociaciones Profibus: P (Profibus nternacional) y PNO
(Organizacin de usuarios de Profibus). Las verificaciones de los productos se
llevan acabo en la Organizacin de Usuarios de Profibus.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
98
Fig. 5.25 Profibus
Profibus es uno de los buses de campo que cuenta con mayor aceptacin en
Europa. Las reas de Aplicacin incluyen la mayora de las aplicaciones
industriales gracias a las tres posibilidades que ofrece Profibus (FMS, DP y
PA). Desde mquinas sencillas, pasando por aplicaciones a nivel de clula,
hasta nivel de proceso con ProfibusPA.
Las caractersticas tcnicas de Profibus son:
Las tres posibilidades tecnolgicas de Profibus son:
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
99
PROFIBUS DP - Periferia descentralizada
Tiempos de reaccin muy pequeos.
Transferencia de pequeas cantidades de datos.
Conexin de equipos de campo, accionamientos, paneles de operacin,
autmatas programables y PC's.
PROFIBUS FMS - Fieldbus Message Speciftcation
nterconexin en red de autmatas programables, supervisores de
proceso, paneles de operacin, PC's, etc.
Comunicacin orientada a objetos.
PROFIBUS PA - Automatizacin de Procesos
Conexin de equipos de proceso sobre autmatas programables,
supervisores de proceso, PC.
Datos y alimentacin sobre un cable.
Seguridad ntrnseca.
Profibus-DP
Optimizado para la transmisin de seales a alta velocidad entre los sistemas
de control automtico y las entradas/salidas distribuidas. Pennite tambin la
transmisin serie de pequeos grupos de datos a/desde perifricos inteligentes.
En este bus se permite la Conexin de equipos de campo, accionarnientos,
paneles de operacin, autmatas programables.
Mediante este bus los autmatas programables se comunican con los
dispositivos de campo (entradas/salidas, accionamientos, vlvulas) por medio
de una comunicacin tipo serie de alta velocidad.
La consulta de los mdulos de entrada y la escritura de salidas se debe de
realizar de forma cclica, y en tiempos de ciclo de bus muy pequeos.
Adicionalmente a las comunicaciones cclicas, se permiten comunicaciones a
cclicas con dispositivos de campo inteligentes para permitir la configuracin,
diagnstico y el manejo de alarmas.
Las funciones necesarias para establecer las comunicaciones estn
establecidas en Profibus-DP de acuerdo con la norma EN 50 170.
En Profibus-DP se permiten sistemas con un solo maestro o multimaestro. Esto
proporciona un alto grado de flexibilidad en la configuracin de los sistemas.
Hasta 126 dispositivos (maestros o esclavos) pueden ser conectados a un bus.
La descripcin de la configuracin del sistema consiste en el nmero de
estaciones, la relacin entre la direccin de la estacin y las direcciones de
entrada/salida, el formato de los datos de entrada/salida, el formato de los
mensajes de diagnstico y los parmetros del bus.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
100
Un sistema Profibus-DP puede contener tres tipos de dispositivos:
DP Maestro Clase 1
Este maestro es el controlador central del bus, el cual intercambia
informacin con los esclavos DP mediante mensajes cclicos.
DP Maestro Clase 2
Son sistemas de programacin, dispositivos de configuracin o paneles de
control. Se utilizan durante la configuracin del bus o en las operaciones de
control y monitorizacin.
DP Esclavo
Un esclavo es un dispositivo perifrico (entradas-salidas, accionamientos,
HM, vlvulas, etc.) que suministra informaciones de entrada y recibe
informaciones de salida del Maestro controlador del bus. Asimismo existen
dispositivos que solamente suministran informaciones de entrada (por
ejemplo un mdulo de entradas digitales) o reciben informaciones de salida
(por ejemplo un mdulo de salidas digitales). La cantidad de informacin de
entrada y salida depende del tipo de dispositivo. Se permite un mximo de
246 bytes de entrada y 246 bytes de salida.
Cclicamente el maestro lee la informacin de entrada procedente de los
esclavos y cclicamente escribe la informacin de salida hacia los esclavos. El
tiempo de ciclo del bus debe ser ms corto que el tiempo de ciclo de la tarea
del autmata. Para muchas aplicaciones de autmata el tiempo de ciclo suele
estar en tomo a 10 milisegundos.
Profibus-DP, cuando la velocidad del bus es de 12 Mbitlsegundo, requiere
solamente un mili segundo para la transmisin de 512 bits de entrada y 512 bits
de salida. El tiempo de transmisin depende del nmero de estaciones
conectadas al bus y de la velocidad de transmisin.
La alta velocidad de transmisin en comparacin con Profibus-FMS se
consigue por la utilizacin de un solo mensaje para la transmisin de los datos
de entrada y de salida.
Los Tiempos de la figura son para esclavos que trasmiten dos bytes de entrada
y dos bytes de salida.
Profibus- FMS
Es la solucin adoptada para la comunicacin a nivel de clula. En este bus se
realiza la interconexin en red de autmatas programables, supervisores de
proceso, paneles de operacin, PC's.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
101
La Comunicacin en Profibus-FMS est orientada a objetos, siguiendo el
modelo de Cliente-Servidor, garantizando la seguridad en la transmisin y la
imposibilidad de lectura, escritura simultnea sobre un mismo objeto.
Los servicios suministrados por Profibus-FMS permiten un amplio rango de
aplicaciones, pudiendo ser utilizado en tareas de comunicacin largas y
complejas.
Servicios en Profibus-FMS:
Conexin-Desconexin de entidades lgicas de comunicacin.
Lectura y escritura de variables.
Carga y Lectura de reas de Memoria.
Depuracin, puesta en Run y Stop de Programas de Aplicacin. .
Transmisin de mensajes con alta o baja prioridad.
Peticiones de identificacin e indicacin de Status.
Las comunicaciones que se pueden establecer en Profibus-FMS:
Comunicacin Maestro/Maestro.
Comunicacin Maestro/Esclavo para transferencia de datos cclica o
acclica.
Comunicacin Maestro/Esclavo para transferencia de datos cclica o
acclica a peticin del esclavo.
Se pueden transmitir hasta 240 bytes en cada servicio de comunicacin.
Fig. 5.26 Equipos conectables a Profibus
Profibus-PA
Este bus est diseado especficamente para automatizacin de procesos
continuos. Permite la conexin en una simple lnea de bus de dos cables de
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
102
equipos de campo, actuadores, autmatas programables, reguladores PD
industriales. Pennite la transmisin de datos y de potencia en el cable de bus
de acuerdo con la nonna lEC 1158-2. Est especialmente diseado para
aplicarse en sistemas con riesgo de explosin.
En este bus se puede realizar la medida, el control y la regulacin mediante
una simple lnea de bus de dos cables que adems alimenta a los dispositivos
de campo. Permite la realizacin de operaciones de mantenimiento y la
conexin/desconexin de dispositivos sin efectos colaterales en el bus.
Profibus-PA ha sido diseado en colaboracin con la industria de control de
procesos continuos y rene los requerimientos de esta rea de Aplicacin:
Perfiles nicos en los dispositivos de automatizacin de procesos e
intercambiabilidad entre dispositivos de diferentes fabricantes.
Conexin y desconexin de dispositivos del bus sin influencia sobre
otros dispositivos.
Comunicacin transparente entre segmentos de bus Profibus-PA en
automatizacin de proceso y segmentos Profibus-DP en automatizacin
de manufactura.
Alimentacin remota y transmisin de datos sobre los mismos dos hilos
cumpliendo la norma lEC 1158-2.
Aplicable en reas con riesgo de explosin con seguridad intrnseca.
Dispositivos de campo
Profibus soporta una gran variedad de equipos que van desde PC's, PLC's
hasta robots pasando por todo tipo de dispositivos de campo. A continuacin se
expone una muestra de los principales dispositivos que se pueden conectar a
Profibus.
Dispositivos de Entrada/Salida
- Mdulos de Entrada/Salida digitales
- Mdulos de Entrada/Salida Analgicos
- Mdulos funcionales
Paneles de Operador y visualizadores
Control de Motores
- Variado res de frecuencia
- Servomecanismos
- Control de motores paso a paso
- Arrancadores
Medida y Adquisicin de datos
- Encoders
- Sensores
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
103
- Sistemas de pesaje y dosificacin de productos
- Resolvers
Sistemas de identificacin
- Plots de Lectura Escritura
- Lectores de cdigos de barras
- Escners
Controladores de Alto Nivel
- Controladores de Posicin
- Sistemas de Soldadura
- Controladores del Robot
- Controladores multiprocesadores
- Controladores de esfuerzo
Sistemas de control en bucle cerrado
- Controladores de Proceso
- Dispositivos de Dosificacin
Dispositivos neumticos
Dispositivos hidrulicos
INTERBUS
nterbus es una red de sensores/actuadores distribuidos para sistemas
fabricacin y control de procesos continuos. Es un sistema abierto de al
prestaciones, de topologa en anillo.
El concepto bsico de un bus abierto es permitir un intercambio informaciones
entre dispositivos producidos por diferentes fabricantes. Las informaciones
intercambiadas comprenden datos de proceso (entrada/salida) parmetros
(datos de configuracin, programas, datos de monitorizacin). El formato de las
informaciones est definido mediante un perfil estndar con el dispositivo
opera. En nterbus se dispone de perfiles estndar para servomotores,
encoders, controladores de robot, controladores de posicin, Paneles de
control y operacin Entradas/Salidas digitales, Entradas/Salidas analgicas,
termopares, contadores variadores de frecuencia, robots, controles de
soldadura, sistemas de identificacin, etc.
nterbus no est respaldado por los grandes fabricantes de autmatas. Sin
embargo, alrededor de 700 desarrolladores de dispositivos de campo lo
soportan, sacando al mercado continuamente nuevos desarrollos tcnicos y
productos. En la actualidad hay instalados ms de 1,5 millones de dispositivos
de campo.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
104
Fig. 5.27 nterbus
Un sistema basado en nterbus est compuesto por una tarjeta de control,
instalada en un PC ndustrial o en un autmata prograrnable, que comunica
con un conjunto de dispositivos distribuidos de entrada/salida.
El protocolo de transmisin de datos es de alta eficiencia con el objetivo de
cumplir los requerimientos de alta velocidad de transmisin en los sistemas de
control.
La comunicacin entre los dispositivos se realiza mediante el protocolo
nterbus, el cual est reflejado en la norma DN 19258. En Alemania, siguiendo
los deseos de los usuarios, las funciones clave de nterbus estn
estandarizadas por la DKE (Deutsche Elektrotechnische Kommission: German
Electrotechnical Cornrnission for DN and VDE). En 1993 se publica la norma
DN E 19 258. Esta norma fija los protocolos de transmisin y los servicios
necesarios para la transmisin de datos. Las especificaciones de los
parmetros de comunicacin fueron publicados en el DN Report 46 en el ao
1995. Todas estas normas fueron homologadas a nivel europeo en 1997 en la
norma EN 50 254 con el ttulo "High Efficiency Cornmunication Subsystem for
Small Data Packages".
nterbus utiliza el mtodo de comunicacin maestro-esclavo, donde el maestro
del bus simultneamente funciona como conexin o interfaz con el bus de nivel
superior. El Protocolo nterbus utiliza la tecnologa de trama suma: Un nico
telegrama actualiza simultneamente todas las entradas y todas las salidas de
los dispositivos conectados al bus. Los Niveles del modelo OS que estn
implementados son: 1 (Fsico), 2 (enlace) y 7 (aplicacin).
TopoIoga
La topologa adoptada de nterbus es el anillo. Todos los dispositivos estn
conectados en un sistema de comunicacin en bucle cerrado. Desde los
dispositivos conectados al anillo principal, liderado por el maestro, se pueden
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
105
conectar subanillos que estructuran el sistema completo. Las conexiones entre
los anillos se realizan mediante mdulos especiales denominados bus terminal.
Un detalle que distingue nterbus de otros sistemas en anillo es que ambas
lneas, la lnea de envo y la lnea de retorno de datos, pertenecen al mismo
cable que pasa a travs de todos los dispositivos conectados al bus. Esto
conlleva que tenga la misma apariencia fsica que una estructura en forma de
rbol. El nivel fsico de nterbus est basado en el estndar RS 485. La interfaz
RS 485 utiliza el mtodo de transmisin por voltaje diferencial sobre un par
trenzado. Debido a la estructura en anillo y la necesidad de llevar la masa
lgica a todos los dispositivos, nterbus requiere la conexin de cinco hilos de
seal en el cable que conecta dos dispositivos. La transmisin de datos se
puede realizar a una velocidad de 500 Kbits a una distancia mxima de 400
metros entre los dispositivos. Como cada dispositivo acta como repetidor de
seal permite que nterbus alcance una distancia superior a 13 km. El mximo
nmero de dispositivos conectados al bus es de 512, con un mximo de 4.096
puntos de entrada/salida.
La estructura punto a punto de comunicacin de nterbus y su divisin en anillo
principal y subanillos se adecua perfectamente a la incorporacin de diferentes
y modernos sistemas de transmisin como la fibra ptica. El sistema de
transmisin se puede convertir en fibra ptica, o en sistemas de transmisin por
infrarrojos, o bien a otros sistemas utilizando convertidores estndar
disponibles en el mercado. La utilizacin por medio de fibra ptica supone que
la transmisin de datos est libre de interferencias.
La estructura en forma de anillo aade al sistema dos ventajas fundamentales.
Primero, en contraste con la redes en lnea, el anillo permite el envo y la
recepcin de datos simultnea. Segundo, la funcin de autodiagnstico del bus
se ve mejorada con la estructura en anillo. Si se produce un cortocircuito en el
bus de comunicacin, al disponer de una estructura en anillo es posible la
localizacin del fallo dado que la comunicacin slo se interrumpe en un
segmento de bus, lo cual no sucede en una estructura en lnea.
lnterbus incorpora el diagnstico centralizado o descentralizado de los
dispositivos del bus, el diagnstico se puede realizar por medio de funciones o
por' registros de datos. El bus efecta el reconocimiento automtico de los
dispositivos participantes y del perfil asociado a ellos. En caso de fallo se
produce la desconexin automtica del dispositivo donde se localiza el fallo, y
se permite el cambio de dispositivos y de la topologa del bus on-line.
AUTOMATAS PROGRAMABLES
Ivaro Aguinaga Barragn Ph.D. Msc. Ing.
106
BIBLIOGRAFA
1. Warnock . G., Programmable Controllers Operation and Application,
Prentice-Hall, 1988.
2. Piedrafita Moreno Ramon, ngeniera de la Automatizacin ndustrial,
Alfaomega, 2001.
3. Garca Gonzales F. J., Control Lgico Programable, Universidad
Tecnolgica de Puebla, 2004.
4. Orille Fernandez ngel Luis, Centrales Elctricas, Universidad
Politcnica de Catalunia, 1997.
5. Bolton W., Mecatrnica Sistemas de Control Electrnico en ngeniera
Mecnica y Elctrica, Alfaomega, 2da. Edicin, Mxico, 2001.
6. Bolton W., Programmable Logic Controllers, Newnes, 1996.
7. Rohner P., Automotion with Programmable Logic Controllers, Macmillan,
1996.
8. Siemens Simatic, Manual del Sistema de Automatizacin S7-200,
Siemens AG, 1998.
9. Siemens Simatic, Microsystem Simatic S7-200, Siemens AG, 1999.
10. Tapia L., PLCs Curso Bsico, Escuela Politcnica Nacional,
Ecuador,1999.
11. Aguinaga A, Automatizacin ndustrial, Maestra de Diseo Materiales y
Produccin, Escuela Politcnica Nacional, Ecuador, 2005.
12. Aguinaga A, Autmatas Programables, Escuela Politcnica Nacional,
Ecuador, 2003.
You might also like
- Certificado de PrácticasDocument1 pageCertificado de PrácticasJonth JiNo ratings yet
- Valor Del Dinero en El TiempoDocument19 pagesValor Del Dinero en El TiempoJonth JiNo ratings yet
- UNIVERSIDAD UTE RedesDocument1 pageUNIVERSIDAD UTE RedesJonth JiNo ratings yet
- 001 Proceso Aprobación Plan y Solictud Cambio de Opción de TitulaciónDocument18 pages001 Proceso Aprobación Plan y Solictud Cambio de Opción de TitulaciónJonth JiNo ratings yet
- Convenio ITS UTEDocument4 pagesConvenio ITS UTEJonth JiNo ratings yet
- Pago de Matricula y HomologacionDocument3 pagesPago de Matricula y HomologacionJonth JiNo ratings yet
- Formato 2. - Grupos-3Document1 pageFormato 2. - Grupos-3Jonth JiNo ratings yet
- Copia de Prueba 3Document2 pagesCopia de Prueba 3Jonth JiNo ratings yet
- SilaboDocument7 pagesSilaboJonth JiNo ratings yet
- UTE ElectromecánicaDocument5 pagesUTE ElectromecánicaJonth JiNo ratings yet
- Sistema Eléctrico de Santo Domingo de Los Tsachilas-SalazarDocument16 pagesSistema Eléctrico de Santo Domingo de Los Tsachilas-SalazarJonth JiNo ratings yet
- Guia de EstudioDocument7 pagesGuia de EstudioJonth JiNo ratings yet
- 958 9322 86 7 - Parte4Document282 pages958 9322 86 7 - Parte4Jonth JiNo ratings yet
- Informe Director de CarreraDocument1 pageInforme Director de CarreraJonth JiNo ratings yet
- Regulacion 043-18Document49 pagesRegulacion 043-18Jonth JiNo ratings yet
- 30:6:21 RedesDocument4 pages30:6:21 RedesJonth JiNo ratings yet
- P5 Caida de Tension Transformador-1Document21 pagesP5 Caida de Tension Transformador-1Jonth JiNo ratings yet
- T Espel 0799Document237 pagesT Espel 0799Jonth JiNo ratings yet
- Definicion de Longitud de PalabraDocument2 pagesDefinicion de Longitud de PalabraariannyNo ratings yet
- Hardware y Sofware Libre en VenezuelaDocument4 pagesHardware y Sofware Libre en VenezuelaRaiza ChirinosNo ratings yet
- Organización DaVinciDocument3 pagesOrganización DaVincijoseDavidQNo ratings yet
- BLOQUE 1 - Introducción A Arduino PDFDocument8 pagesBLOQUE 1 - Introducción A Arduino PDFLuciana SemorileNo ratings yet
- Recursos Del PIC. Uso de La Memoria EEPROM InternaDocument3 pagesRecursos Del PIC. Uso de La Memoria EEPROM InternaValeria Cristina Gonzalez PachecoNo ratings yet
- Manual Convert Id orDocument11 pagesManual Convert Id orAnGelo Sanchez100% (2)
- Automatizacion de Sistemas de Manufactura Sesion 3 PLC HornerDocument102 pagesAutomatizacion de Sistemas de Manufactura Sesion 3 PLC HornerCarlos PelaezNo ratings yet
- Tarea 14 AuditoriaDocument2 pagesTarea 14 AuditoriaCarmen AgustínNo ratings yet
- Uso Del Mouse y Teclado en InformáticaDocument2 pagesUso Del Mouse y Teclado en InformáticaErick MarquezNo ratings yet
- Practica-Programacion C++Document9 pagesPractica-Programacion C++Mauricio EnriquezNo ratings yet
- Módulo 3 Introducción A Power AppsDocument58 pagesMódulo 3 Introducción A Power Appsmotor1981No ratings yet
- Ut06-Virtualizacion2 Aso (Asir)Document19 pagesUt06-Virtualizacion2 Aso (Asir)RtyRteyNo ratings yet
- Guia 2-Ii: Solucion de Problemas de Computo: GFPI-F-135 V01Document21 pagesGuia 2-Ii: Solucion de Problemas de Computo: GFPI-F-135 V01felipe vargasNo ratings yet
- PLAN ESTUDIOS 6° A 9° INFORMÁTICADocument15 pagesPLAN ESTUDIOS 6° A 9° INFORMÁTICAmilena_sandra3744% (9)
- El DialectoDocument18 pagesEl DialectoYordin FuentesNo ratings yet
- Pasos para Configurar Emuladores en HyperspinDocument57 pagesPasos para Configurar Emuladores en HyperspinLeandro Damian0% (1)
- Manual S7300Document45 pagesManual S7300RUDY HERCULESNo ratings yet
- Historia: CP/M (Control Program For Microcomputers) Es Un Sistema Operativo de Un Solo Usuario/una SolaDocument2 pagesHistoria: CP/M (Control Program For Microcomputers) Es Un Sistema Operativo de Un Solo Usuario/una SolaGregorio Quispe HuancaNo ratings yet
- Guía y Ficha - Ofimatica - Periodo 1Document9 pagesGuía y Ficha - Ofimatica - Periodo 1Silvia GonzálezNo ratings yet
- 15 Dy1022laDocument3 pages15 Dy1022laAlberto GranadosNo ratings yet
- Dispositivos Externos de Entrada y SalidaDocument2 pagesDispositivos Externos de Entrada y SalidaKevin alexander nuñez paulinoNo ratings yet
- Plan Anual de Área de Tecnología e Informática 2016Document74 pagesPlan Anual de Área de Tecnología e Informática 2016Angie VillalobosNo ratings yet
- Redes Inalambricas - Aca 1 - Daniela BarreraDocument8 pagesRedes Inalambricas - Aca 1 - Daniela BarreraDANIELA BARRERA MOTTANo ratings yet
- Proyecto de Grado FinalDocument50 pagesProyecto de Grado FinalAlan Castillo0% (1)
- CVX200 CVX100Document48 pagesCVX200 CVX100Miguel HNo ratings yet
- Sistema de Citofonia Eco FuturoDocument8 pagesSistema de Citofonia Eco FuturoPablo José Delgado CarrasquelNo ratings yet
- CNCDocument22 pagesCNCBacilio MartinezNo ratings yet
- Nestor Fuertes 202016893 251 Tarea3Document3 pagesNestor Fuertes 202016893 251 Tarea3BRAYAN ANTONIO BAEZNo ratings yet
- Guia 8 Fundamentos de Ti PDFDocument56 pagesGuia 8 Fundamentos de Ti PDFneguillen abreuNo ratings yet
- ICS User ManualDocument108 pagesICS User ManualPa-jokey Espinoza GutierrezNo ratings yet