You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Lab 5 PDFDocument3 pagesLab 5 PDFMuddassir AhmedNo ratings yet
- 3 - KV VHDL P1aDocument7 pages3 - KV VHDL P1aChandreshSinghNo ratings yet
- X PowderDocument122 pagesX PowderMoaaz AhmedNo ratings yet
- PHD ProposalDocument1 pagePHD ProposalMoaaz AhmedNo ratings yet
- 42-Improvement in Dielectric Properties of Low TemperatureDocument5 pages42-Improvement in Dielectric Properties of Low TemperatureMoaaz AhmedNo ratings yet
- Applying - Ms Progs in Foreign Unis & ScholarshipsDocument110 pagesApplying - Ms Progs in Foreign Unis & ScholarshipsMoaaz AhmedNo ratings yet
- Special Report Soi Wafer Technology For Cmos Ics: Robert Simonton President, Simonton AssociatesDocument11 pagesSpecial Report Soi Wafer Technology For Cmos Ics: Robert Simonton President, Simonton AssociatesMoaaz AhmedNo ratings yet
- Cold ShieldDocument1 pageCold ShieldMoaaz AhmedNo ratings yet
- Frequency Reuse, Cell Separation, and Capacity Analysis of VHF Digital Link Mode 3 TDMADocument23 pagesFrequency Reuse, Cell Separation, and Capacity Analysis of VHF Digital Link Mode 3 TDMAAshishch67No ratings yet
- CMOS Image Sensors 2010 ReportDocument5 pagesCMOS Image Sensors 2010 ReportMoaaz AhmedNo ratings yet
- 08 Antonio CerdeiraDocument57 pages08 Antonio CerdeiraMoaaz AhmedNo ratings yet
- How To Share Folders in Ubuntu & Access Them From Windows 7Document12 pagesHow To Share Folders in Ubuntu & Access Them From Windows 7Zenin EasaNo ratings yet
- Quickguide ProteusDocument7 pagesQuickguide ProteusdavidemirraNo ratings yet
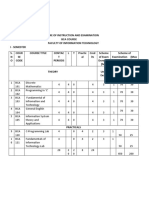
- TOS EdtechDocument2 pagesTOS EdtechLeovhic Tomboc OliciaNo ratings yet
- Python Programming ppt0Document25 pagesPython Programming ppt0Fiker FikerwessenuNo ratings yet
- BcaDocument68 pagesBcaLoadingNo ratings yet
- Introduction To Management Science 8th Edition by Bernard W. Taylor IIIDocument58 pagesIntroduction To Management Science 8th Edition by Bernard W. Taylor IIIdsatyanegaraNo ratings yet
- ID of PG-2nd Year Student For Scholarship-9th September 2013Document18 pagesID of PG-2nd Year Student For Scholarship-9th September 2013nira365No ratings yet
- Cheat Sheet Hibernate Performance Tuning PDFDocument6 pagesCheat Sheet Hibernate Performance Tuning PDFdanielisozaki100% (1)
- Soalan Projek PSPD LatestDocument9 pagesSoalan Projek PSPD LatestAzlan AliNo ratings yet
- Waterfall To Agile GuideDocument14 pagesWaterfall To Agile GuideabdulonnetNo ratings yet
- Linear Programming Models in ServicesDocument14 pagesLinear Programming Models in ServicesHarsh GuptaNo ratings yet
- Mark ZukerbergDocument6 pagesMark ZukerbergAbhay Shankar BharadwajNo ratings yet
- PDFPCDocument27 pagesPDFPCmadsonengNo ratings yet
- Hamza Hanif DLD Lab #2Document6 pagesHamza Hanif DLD Lab #2Hamza KhanNo ratings yet
- Introduction To Excel Cooling Load Calculations Using RTS MethodDocument6 pagesIntroduction To Excel Cooling Load Calculations Using RTS MethodMelvyn Koa WingNo ratings yet
- OracleEloqua Emails UserGuide PDFDocument215 pagesOracleEloqua Emails UserGuide PDFAvinash BmNo ratings yet
- नामांकन म / Enrollment No: 146Document2 pagesनामांकन म / Enrollment No: 146Mukesh MistriNo ratings yet
- How To Interface A Microchip PIC MCU With A Hobby RC Servo, Paulo E. MerlotiDocument18 pagesHow To Interface A Microchip PIC MCU With A Hobby RC Servo, Paulo E. MerlotiMarco Medina100% (1)
- AIX Admin PDFDocument262 pagesAIX Admin PDFsourabhNo ratings yet
- Memory Management in SolarisDocument4 pagesMemory Management in Solarisjohnmerc1234No ratings yet
- Internet Communication in School PartnershipsDocument43 pagesInternet Communication in School PartnershipsDanish AzharNo ratings yet
- Sequence DetectorDocument25 pagesSequence DetectorYudish Nandraj KistoNo ratings yet
- Amount 2 Words - ASK TOM OracleDocument48 pagesAmount 2 Words - ASK TOM OraclesovitNo ratings yet
- Isilon Network Design Considerations PDFDocument44 pagesIsilon Network Design Considerations PDFDavid GiriNo ratings yet
- Data Structures With C NotesDocument118 pagesData Structures With C NotesDheeraj NambiarNo ratings yet
- VMware Technical Journal - Summer 2013Document64 pagesVMware Technical Journal - Summer 2013cheese70No ratings yet
- Twin Rotor Observer ImplementationDocument7 pagesTwin Rotor Observer Implementationtidjani86No ratings yet
- Mysql Connectivity Using Java ProcedureDocument67 pagesMysql Connectivity Using Java Procedureraji rameshNo ratings yet