You might also like
- CdfaDocument33 pagesCdfaAbdullah ZubairNo ratings yet
- Departure Procedures NotesDocument5 pagesDeparture Procedures NotesMadeleine AguilarNo ratings yet
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveFrom EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveRating: 5 out of 5 stars5/5 (2)
- AIRBUS - Enhancing Terrain AwarenessDocument20 pagesAIRBUS - Enhancing Terrain AwarenessJohn R GrayNo ratings yet
- 737 Performance Reference Handbook - EASA EditionFrom Everand737 Performance Reference Handbook - EASA EditionRating: 4.5 out of 5 stars4.5/5 (3)
- B737-Brnav-Rnp Ops and VNAV ApproachesDocument59 pagesB737-Brnav-Rnp Ops and VNAV Approachesrobsous100% (1)
- B777 PDFDocument21 pagesB777 PDFLeo Chan100% (1)
- Progress Flight CardDocument1 pageProgress Flight CardIan TompkinsNo ratings yet
- Introduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsFrom EverandIntroduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsNo ratings yet
- RNP APCH CxListDocument4 pagesRNP APCH CxListBayu Chandra100% (1)
- Landing TechniquesDocument26 pagesLanding TechniquesKaroon Sem100% (1)
- Human Performance and Limitations in AviationFrom EverandHuman Performance and Limitations in AviationRating: 4.5 out of 5 stars4.5/5 (2)
- RNAV System Requirements For AirplanesDocument37 pagesRNAV System Requirements For Airplanesvishwaask0% (1)
- B 777 Normal ProceduresDocument31 pagesB 777 Normal ProceduresransfootsukumayaNo ratings yet
- The Circling Approach: David OwensDocument7 pagesThe Circling Approach: David OwensNacho100% (1)
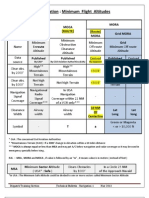
- Minimum Flight Altitudes ComparisonDocument2 pagesMinimum Flight Altitudes Comparisonhaytham_z_aNo ratings yet
- ADIRU Alignment 777Document4 pagesADIRU Alignment 777robsousNo ratings yet
- B737-800 Thrust ReductionDocument5 pagesB737-800 Thrust ReductionTariq khosoNo ratings yet
- ETOPS Initial - Revised LogoDocument112 pagesETOPS Initial - Revised LogoKaran Karan0% (1)
- FMC ManDocument208 pagesFMC ManrafaelldalpraNo ratings yet
- China RVSMDocument10 pagesChina RVSMSher NarkulovNo ratings yet
- Performance LandingDocument17 pagesPerformance LandingBFBGFD100% (2)
- A330 Engine Failure in CruiseDocument1 pageA330 Engine Failure in CruiseJudgeNo ratings yet
- WindshearDocument15 pagesWindshearswathikanagarajanNo ratings yet
- Graphic IFR Departure ProceduresDocument5 pagesGraphic IFR Departure ProceduresGooreshNo ratings yet
- Warning SystemsDocument5 pagesWarning SystemsAziz AimadNo ratings yet
- Manual Singapore Flying School PDFDocument116 pagesManual Singapore Flying School PDFekalaya djuanda100% (1)
- A/C Performance - GeneralDocument14 pagesA/C Performance - GeneralvivekNo ratings yet
- FAA Experiences and Future Plans: RNAV ApproachesDocument18 pagesFAA Experiences and Future Plans: RNAV ApproachesRudi WidiokoNo ratings yet
- Landing Techniques and Crosswind LandingsDocument12 pagesLanding Techniques and Crosswind LandingsChichester100% (1)
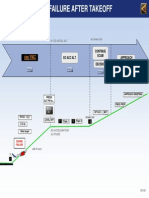
- ENG FAILURE AFTER TAKEOFF PROCEDUREDocument17 pagesENG FAILURE AFTER TAKEOFF PROCEDUREsaudia686No ratings yet
- Airbus Flight Operation Briefing Notes: Approach Techniques. Flying Stabilized Approaches.Document13 pagesAirbus Flight Operation Briefing Notes: Approach Techniques. Flying Stabilized Approaches.Oo_TzT_oONo ratings yet
- Flight Operations Briefing Notes - Descent Management - Descent and Approach Profile ManagementDocument6 pagesFlight Operations Briefing Notes - Descent Management - Descent and Approach Profile ManagementDuckyLuckyNo ratings yet
- Contingency Procedures NAT RegionDocument4 pagesContingency Procedures NAT RegionflyspannerrNo ratings yet
- Extended Diversion Time Operations GuideDocument15 pagesExtended Diversion Time Operations GuidenaziaNo ratings yet
- Rules of ThumbDocument4 pagesRules of ThumbPrinceNo ratings yet
- Review Approach & Landing Gross Climb GradientsDocument3 pagesReview Approach & Landing Gross Climb GradientsHaseeb Abu Alwan100% (1)
- ETOPS - Ask Captain LimDocument18 pagesETOPS - Ask Captain LimtugayyoungNo ratings yet
- Catii and CatiiiDocument20 pagesCatii and Catiiiasef jahmaniNo ratings yet
- This Brief Is Provided For Information and Guidance. in The Event of Conflicting Information or Instructions, Company Manuals Take PrecedenceDocument5 pagesThis Brief Is Provided For Information and Guidance. in The Event of Conflicting Information or Instructions, Company Manuals Take PrecedenceDevdatt SondeNo ratings yet
- Vietnam A320 Line TrainingDocument11 pagesVietnam A320 Line TrainingJuanaleNo ratings yet
- Cyle 6 Winter 2.0 PDFDocument70 pagesCyle 6 Winter 2.0 PDFJavier Castaños RuizNo ratings yet
- RNAV Approaches LeafletDocument2 pagesRNAV Approaches LeafletJonathan DentonNo ratings yet
- EGPWSDocument4 pagesEGPWSmrxybbNo ratings yet
- Basic Ifr CourseDocument54 pagesBasic Ifr CourseMoslem Grimaldi100% (1)
- Airbus NotesDocument130 pagesAirbus Notespresencia62No ratings yet
- A330 DescentDocument16 pagesA330 DescentkokelvinNo ratings yet
- Airline Transport Pilot License Exam SyllabusDocument74 pagesAirline Transport Pilot License Exam SyllabusAjay50% (2)
- Continuous Descent Final Approach (CDFADocument5 pagesContinuous Descent Final Approach (CDFAJehan IchhaporiaNo ratings yet
- FBW Pitch Trim Settings MeetingDocument25 pagesFBW Pitch Trim Settings MeetingAndrey DanilchenkoNo ratings yet
- ATPL Fragen 1Document18 pagesATPL Fragen 1martinNo ratings yet
- All Phases Flow Pattern SADocument13 pagesAll Phases Flow Pattern SAStarlightNo ratings yet
- RNP Vs Rnav Vs RNP RnavDocument8 pagesRNP Vs Rnav Vs RNP Rnavtarun86100% (1)
- B 737 LVO ProceduresDocument6 pagesB 737 LVO ProceduresAbdel Hafid Lahreche100% (1)
- A320-Unreliable Speed IndicationDocument6 pagesA320-Unreliable Speed IndicationDavid Xue50% (2)
- GPS1Document20 pagesGPS1chakri1729No ratings yet
- How humidity affects density altitude calculationsDocument1 pageHow humidity affects density altitude calculationschakri1729No ratings yet
- Aerodynamics Class 2Document53 pagesAerodynamics Class 2sijanivandiNo ratings yet
- Aviation Study GuideDocument12 pagesAviation Study GuideAxel MezaNo ratings yet
- Airspaces For DummiesDocument16 pagesAirspaces For DummiesitsrijoNo ratings yet
- Hover AutorotationDocument1 pageHover Autorotationchakri1729No ratings yet
- A Layman's Guide To Attitude Heading Reference Systems (AHRS) - Helicopter Maintenance MagazineDocument4 pagesA Layman's Guide To Attitude Heading Reference Systems (AHRS) - Helicopter Maintenance Magazinechakri1729No ratings yet
- Aerodynamics Class 1Document21 pagesAerodynamics Class 1Vipin Chahal100% (1)
- Low G and Mast BumpingDocument1 pageLow G and Mast Bumpingchakri1729No ratings yet
- Ground ResonanceDocument1 pageGround Resonancechakri1729No ratings yet
- Basics Introduction To Zener DiodesDocument10 pagesBasics Introduction To Zener Diodeschakri1729100% (1)
- Dynamic RolloverDocument1 pageDynamic Rolloverchakri1729No ratings yet
- Buckingham Pi TheoremDocument4 pagesBuckingham Pi TheoremamdevaNo ratings yet
- Buckingham's Pi TheoremDocument8 pagesBuckingham's Pi TheoremJOPAKNo ratings yet
- Avionics BasicsDocument47 pagesAvionics Basicschakri1729No ratings yet
- Bessel ApplicatıonDocument37 pagesBessel ApplicatıonNuriye SancarNo ratings yet
- LFPODocument99 pagesLFPOHani BoudiafNo ratings yet
- Giv QRHDocument592 pagesGiv QRHKellee Valentine100% (13)
- WX NotamsDocument37 pagesWX NotamsJohn AngusNo ratings yet
- Instrument Stage Check Study PacketDocument70 pagesInstrument Stage Check Study Packetsantiago lara100% (2)
- Somalia Aeronautical Information Publication Part 2 En-Route (ENRDocument88 pagesSomalia Aeronautical Information Publication Part 2 En-Route (ENRabdirahmanNo ratings yet
- Aviation What Is PRNAVDocument10 pagesAviation What Is PRNAVVito GentileNo ratings yet
- B737NG QRCDocument2 pagesB737NG QRCpaulbowes100% (4)
- Kbos KJFKDocument24 pagesKbos KJFKCarlitosIbanezNo ratings yet
- FAA Advisory Circular 20-138D PDFDocument261 pagesFAA Advisory Circular 20-138D PDFktsaknakis_1No ratings yet
- WGS-84 Manual: Your Guide to the Global Coordinate SystemDocument124 pagesWGS-84 Manual: Your Guide to the Global Coordinate SystemДраган ДрагановNo ratings yet
- NAX B787 Profiles: For Training OnlyDocument15 pagesNAX B787 Profiles: For Training OnlyValery RANGARAJU100% (4)
- SKPS PDFDocument9 pagesSKPS PDFHarold DongoNo ratings yet
- LFPGTNCM - PDF - 1584960681 SimbriefDocument44 pagesLFPGTNCM - PDF - 1584960681 Simbriefio kNo ratings yet
- Kord Klax PDFDocument36 pagesKord Klax PDFCarlitosIbanezNo ratings yet
- LFPGKJFK PDF 1581537035Document66 pagesLFPGKJFK PDF 1581537035io kNo ratings yet
- Annex 6 - Part II - International General Aviation - Aeroplanes PDFDocument182 pagesAnnex 6 - Part II - International General Aviation - Aeroplanes PDFHrishikesh Narasimhan100% (2)
- Australian Law IndexDocument34 pagesAustralian Law IndexBashNo ratings yet
- Dublin Airport Trip Kit Index and InformationDocument93 pagesDublin Airport Trip Kit Index and InformationTweed3ANo ratings yet
- Ksfo KlaxDocument31 pagesKsfo KlaxCarlitosIbanezNo ratings yet
- PBNDocument8 pagesPBNKedamawi RecordsNo ratings yet
- Jeppesen Manual Air Traffic ControlDocument12 pagesJeppesen Manual Air Traffic ControlAmirAli MohebbiNo ratings yet
- Air Law DgcaDocument26 pagesAir Law DgcaMohd ShoebNo ratings yet
- OFP SummaryDocument41 pagesOFP SummaryTEA60ALSTON DIASNo ratings yet
- Module 1&2+Document39 pagesModule 1&2+PhongLanNo ratings yet
- G3 1234 OFP briefingDocument48 pagesG3 1234 OFP briefingviniciusksp299No ratings yet
- Introduction To RNAV: ICAO PBN Workshop TanzaniaDocument33 pagesIntroduction To RNAV: ICAO PBN Workshop TanzaniaLeonelNo ratings yet
- VOMMDocument62 pagesVOMMfresh_pearlieNo ratings yet
- Kewrklax PDF 1692015031Document57 pagesKewrklax PDF 1692015031Uxío Pita BruzosNo ratings yet
- SWA 2250 Briefing Provides Fuel Prices, 14 CFR and Company Notices/TITLEDocument39 pagesSWA 2250 Briefing Provides Fuel Prices, 14 CFR and Company Notices/TITLEasfk;ajsdfNo ratings yet
- Sids Rwy 26 EpktDocument4 pagesSids Rwy 26 EpktMateusz HeinNo ratings yet