You might also like
- Equações Diferenciais II: Orestes Piermatei FilhoDocument918 pagesEquações Diferenciais II: Orestes Piermatei FilhoPereira CarlosNo ratings yet
- Apostila Questões de Micro I - FGVDocument128 pagesApostila Questões de Micro I - FGVdaniellavorNo ratings yet
- DERIVADASDocument14 pagesDERIVADASBruna MorranaNo ratings yet
- Notas Int TopologiaDocument39 pagesNotas Int TopologiaPaulo Vinicius jararoi Guesser guerereNo ratings yet
- Modulo 12Document9 pagesModulo 12Daniel marquesNo ratings yet
- TomboDocument4 pagesTomboVIVINo ratings yet
- Anel de Polinômios PDFDocument69 pagesAnel de Polinômios PDFWállef SilvaNo ratings yet
- Exame de Metodologias de RiscoDocument4 pagesExame de Metodologias de RiscoScribdTranslationsNo ratings yet
- 5 Fju 4 B 0 Q 1 OsocDocument5 pages5 Fju 4 B 0 Q 1 OsocAnónimoNo ratings yet
- Aula 30Document9 pagesAula 30JuniorNo ratings yet
- Seção 9 HomeomorfismosDocument3 pagesSeção 9 HomeomorfismosPablo JoséNo ratings yet
- Equa Coes Funciona IsDocument14 pagesEqua Coes Funciona IsFelipe AizicNo ratings yet
- Rafael Miyazaki Funcoes Geratrizes N3NU RAFAEL MIYAZAKIDocument5 pagesRafael Miyazaki Funcoes Geratrizes N3NU RAFAEL MIYAZAKIIbilcemNo ratings yet
- Lista - 5 - Metodos MatematicosDocument2 pagesLista - 5 - Metodos MatematicosCarlos augusto LeaoNo ratings yet
- Calculo Numérico II (Parte2)Document15 pagesCalculo Numérico II (Parte2)daianedonegaNo ratings yet
- Apostila de Matemática Aplicada As Ciências Naturais IIDocument27 pagesApostila de Matemática Aplicada As Ciências Naturais IImarkonniiNo ratings yet
- Lista 3 DerivadaDocument9 pagesLista 3 DerivadaFernando CarvalhoNo ratings yet
- Trabalho IDocument3 pagesTrabalho IAbrão AntónioNo ratings yet
- Ficha de Trabalho 9 12º AnoDocument4 pagesFicha de Trabalho 9 12º AnoCélia CorreiaNo ratings yet
- CN Revisao2Document4 pagesCN Revisao2DenilsonNo ratings yet
- Analise2 2017 1 - Lista04Document1 pageAnalise2 2017 1 - Lista04Willderson GeraldoNo ratings yet
- Mat I 2022 CalculoDocument245 pagesMat I 2022 Calculoguga.teles15No ratings yet
- Aula 1 Clculo IDocument8 pagesAula 1 Clculo IAzark KingNo ratings yet
- Aula 07 - FilipeDocument15 pagesAula 07 - Filipeniviacs.nsNo ratings yet
- Semana 2 - Homomorfismo de AnéisDocument9 pagesSemana 2 - Homomorfismo de AnéisMarcio Guarino de Souza100% (1)
- Aula 04 e 05Document13 pagesAula 04 e 05Carol SilvaNo ratings yet
- Captura de Ecrã 2023-10-24 À(s) 10.56.18Document6 pagesCaptura de Ecrã 2023-10-24 À(s) 10.56.18Martim MendesNo ratings yet
- Solucao Prova Mestrado 2022 2Document4 pagesSolucao Prova Mestrado 2022 2Caio ClarindoNo ratings yet
- Lista 4 - Introdução e Regras de DerivaçãoDocument9 pagesLista 4 - Introdução e Regras de DerivaçãopamelampNo ratings yet
- Função de Função Geradora e Teste de AderênciaDocument25 pagesFunção de Função Geradora e Teste de AderênciaAlessandro SilvaNo ratings yet
- Análise No R N Capitulo 1Document82 pagesAnálise No R N Capitulo 1Neisser Arturo Soto FernándezNo ratings yet
- Análise No RN - J. Delgado & K. Frensel PDFDocument260 pagesAnálise No RN - J. Delgado & K. Frensel PDFJuan Figo100% (1)
- Material Suplementar Ao Texto MontgomeryDocument57 pagesMaterial Suplementar Ao Texto MontgomeryRibamar Júnior CavalcanteNo ratings yet
- Topologia Na Reta Notas de AulaDocument23 pagesTopologia Na Reta Notas de Aulablister_xbladeNo ratings yet
- 13-Cálculo Variacional Ou Das VariaçõesDocument51 pages13-Cálculo Variacional Ou Das VariaçõesRoberto Valente De SouzaNo ratings yet
- 7 - Variável Aleatória - Eng. MateriaisDocument6 pages7 - Variável Aleatória - Eng. MateriaisSamuel BarrosNo ratings yet
- Lista 2 - Análise IIDocument2 pagesLista 2 - Análise IIVinicius Pinheiro BentoNo ratings yet
- Calculo Fracionário e As Suas Aplicações: 1 IntroduçãoDocument9 pagesCalculo Fracionário e As Suas Aplicações: 1 Introduçãojonathan jordãoNo ratings yet
- Prova Mestrado Padrao de Resposta 2021 1Document2 pagesProva Mestrado Padrao de Resposta 2021 1erivan grangeiroNo ratings yet
- Ufsc Aprofundamento MatematicaDocument42 pagesUfsc Aprofundamento Matematicaeduardaschadeck63No ratings yet
- Propriedade de LNDocument7 pagesPropriedade de LNRafael SantosNo ratings yet
- Distribuição Teórica Da Probabilidade Indicadores em MoçambiqueDocument12 pagesDistribuição Teórica Da Probabilidade Indicadores em MoçambiqueDias AlizeuNo ratings yet
- IntegraisDocument6 pagesIntegraisMarcelo ColomboNo ratings yet
- Derivação Das Funções Reais de Variável RealDocument23 pagesDerivação Das Funções Reais de Variável RealVicente Xavier Chocancunene100% (4)
- Lista 3Document2 pagesLista 3Leticia Mattos dos AnjosNo ratings yet
- Função Sem Primitiva PDFDocument10 pagesFunção Sem Primitiva PDFfrancisco_araujo_22No ratings yet
- Fundamentos de MatemáticaDocument257 pagesFundamentos de MatemáticaRuiNo ratings yet
- A Derivada de Um IntegralDocument9 pagesA Derivada de Um IntegralHELIO BERNARDO LOPES100% (6)
- Guaio1 Parte1 2021Document20 pagesGuaio1 Parte1 2021Francisco TeixeiraNo ratings yet
- Lista 103213Document12 pagesLista 103213samuellmillioleNo ratings yet
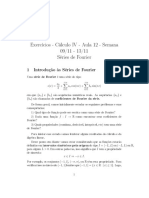
- Exercícios - Cálculo IV - Aula 12 - Semana 09/11 - 13/11 Séries de FourierDocument6 pagesExercícios - Cálculo IV - Aula 12 - Semana 09/11 - 13/11 Séries de FourierTarcídioAntônioNo ratings yet
- AnaliseDocument6 pagesAnaliseLeticia Mattos dos AnjosNo ratings yet
- Analise Real IIIDocument5 pagesAnalise Real IIIcancnNo ratings yet
- Lista 4Document3 pagesLista 4José PaivaNo ratings yet
- Análise - Notas de Aula PDFDocument137 pagesAnálise - Notas de Aula PDFAntonio DionisioNo ratings yet
- Aula FunçõesDocument12 pagesAula FunçõesAndré BassiNo ratings yet
- Dúvidas Da Lista 1 - 230406 - 162543Document11 pagesDúvidas Da Lista 1 - 230406 - 162543Brendo CostaNo ratings yet
- Series e Produtos InfinitosDocument9 pagesSeries e Produtos InfinitosHELIO BERNARDO LOPESNo ratings yet
- Momentos e Funções GeradorasDocument13 pagesMomentos e Funções GeradorasHELIO BERNARDO LOPES100% (5)
- Desigualdades Probabilisticas ImportantesDocument12 pagesDesigualdades Probabilisticas ImportantesHELIO BERNARDO LOPESNo ratings yet
- Equações Às Diferenças Ordinárias LinearesDocument11 pagesEquações Às Diferenças Ordinárias LinearesHELIO BERNARDO LOPES100% (4)
- O Primal e o Dual em Programação LinearDocument9 pagesO Primal e o Dual em Programação LinearHELIO BERNARDO LOPES100% (3)
- A Derivada de Um IntegralDocument9 pagesA Derivada de Um IntegralHELIO BERNARDO LOPES100% (6)
- A Primitivação Por PortasDocument8 pagesA Primitivação Por PortasHELIO BERNARDO LOPES100% (1)
- Nota Sobre IndeterminaçõesDocument11 pagesNota Sobre IndeterminaçõesHELIO BERNARDO LOPES100% (10)
- As Fórmulas Resolventes 2Document4 pagesAs Fórmulas Resolventes 2HELIO BERNARDO LOPESNo ratings yet
- Grandezas, Unidades e Sistemas de UnidadesDocument9 pagesGrandezas, Unidades e Sistemas de UnidadesHELIO BERNARDO LOPES100% (4)
- Resolver EquaçõesDocument23 pagesResolver EquaçõesHELIO BERNARDO LOPES100% (6)
- A Desigualdade de ChebychevDocument17 pagesA Desigualdade de ChebychevHELIO BERNARDO LOPES100% (1)
- Escoamento AnualDocument7 pagesEscoamento AnualHELIO BERNARDO LOPESNo ratings yet
- As Fórmulas ResolventesDocument18 pagesAs Fórmulas ResolventesHELIO BERNARDO LOPES100% (3)
- 05 22 PT Sta Rita de Casia Missa FDocument6 pages05 22 PT Sta Rita de Casia Missa FFelipe PaschoalNo ratings yet
- Avaliaçãoes Facuminas Alfabetização e Letramento PremiumDocument37 pagesAvaliaçãoes Facuminas Alfabetização e Letramento PremiumMarlon Mares100% (6)
- Brma Install ManualDocument58 pagesBrma Install ManualLucasAndreNo ratings yet
- Caso Clínico e SAEDocument5 pagesCaso Clínico e SAEMidiã CaldasNo ratings yet
- Unidade de Medidas - Fisica 1 AnoDocument4 pagesUnidade de Medidas - Fisica 1 AnoClaudemir NunesNo ratings yet
- Turbinador Consciência Profissional - O MegaTurbinador Estratégico Das OrganizaçõesDocument27 pagesTurbinador Consciência Profissional - O MegaTurbinador Estratégico Das Organizaçõesbrenda andradeNo ratings yet
- Demonstracões Financeiras EZTEC 2019Document50 pagesDemonstracões Financeiras EZTEC 2019Diego PiresNo ratings yet
- Tabela+Parametros+de+Corte+ +V2+2021Document5 pagesTabela+Parametros+de+Corte+ +V2+2021Stanlei FernandaNo ratings yet
- O Verbo Encantado. Imagens Do Padre Cícero Na Literatura de Cordel. Francisco Regis Lopes RamosDocument13 pagesO Verbo Encantado. Imagens Do Padre Cícero Na Literatura de Cordel. Francisco Regis Lopes Ramosamanda_teixeira_1No ratings yet
- Re 82176 Hca10 Aula 16Document8 pagesRe 82176 Hca10 Aula 16Bruno HenriquesNo ratings yet
- Emprego Das Classes de Palavras 1Document10 pagesEmprego Das Classes de Palavras 1Rodolfo SilvaNo ratings yet
- Solid Works Moldes - Machos e CavidadesDocument28 pagesSolid Works Moldes - Machos e Cavidadesjunior_project4981100% (1)
- Testes de Integração, Sistema e AceitaçãoDocument28 pagesTestes de Integração, Sistema e AceitaçãoVinicius Cardoso GarciaNo ratings yet
- Resumo HistoplasmoseDocument5 pagesResumo HistoplasmoseGustavo I. Moraes100% (1)
- Prova Integrado Picos Salas 4 e 5 2019-12-01Document12 pagesProva Integrado Picos Salas 4 e 5 2019-12-01Fabio AlvesNo ratings yet
- Perícia Forense ComputacionalDocument123 pagesPerícia Forense ComputacionalEder CcbNo ratings yet
- Edital ValinhosDocument80 pagesEdital Valinhosdiogomelop2193No ratings yet
- Empresa ProdivetDocument1 pageEmpresa ProdivetRicardo MartinsNo ratings yet
- Destino Manifesto 2 PDFDocument17 pagesDestino Manifesto 2 PDFalgoz36No ratings yet
- Rodrigo Alves Dos Santos-1Document1 pageRodrigo Alves Dos Santos-1Rodrigo Alves dos Santos AlvesNo ratings yet
- Manutenção de Computador - Memória - Conceitos e DefiniçõesDocument3 pagesManutenção de Computador - Memória - Conceitos e DefiniçõesHipertec TecnologiaNo ratings yet
- Resumo Das Aulas de ImunologiaDocument56 pagesResumo Das Aulas de ImunologiaClaudio Vieira da SilvaNo ratings yet
- Tecumseh Palestra 2015Document131 pagesTecumseh Palestra 2015Marcus Banzatto100% (1)
- Cinesioterapia (Aula 4 - Postura)Document51 pagesCinesioterapia (Aula 4 - Postura)ketsume.wsNo ratings yet
- Roteiro Das FinançasDocument1 pageRoteiro Das FinançasGabriel VieiraNo ratings yet
- DCR Aimorés 2017Document33 pagesDCR Aimorés 2017Lusineide SilvaNo ratings yet
- Mapa Mental CriminologiaDocument11 pagesMapa Mental CriminologiaJuliana Cordeiro0% (1)
- Prova Ibge SCQ 2021Document10 pagesProva Ibge SCQ 2021Mx BxNo ratings yet
- Evolução Da PornografiaDocument13 pagesEvolução Da PornografiaHugo LeonardoNo ratings yet
- Silo - Tips - Como Instalar Uma Image Pela Primeira Vez Nas Nossas DreamboxDocument7 pagesSilo - Tips - Como Instalar Uma Image Pela Primeira Vez Nas Nossas DreamboxluciusmonaNo ratings yet