You might also like
- 7 Leading Machine Learning Use CasesDocument11 pages7 Leading Machine Learning Use CasesUGNo ratings yet
- What Are Comorbidities-And How Do They Affect COVID-19Document1 pageWhat Are Comorbidities-And How Do They Affect COVID-19Tee Shi FengNo ratings yet
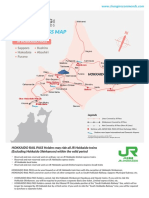
- HokkaidocontentmapDocument1 pageHokkaidocontentmapTee Shi FengNo ratings yet
- Japan Vacations Adventures by DisneyDocument23 pagesJapan Vacations Adventures by DisneyTee Shi FengNo ratings yet
- Python For Financial Analysis Ebook 2021Document82 pagesPython For Financial Analysis Ebook 2021Tee Shi Feng100% (1)
- 01 The Web Developer Bootcamp PDFDocument9 pages01 The Web Developer Bootcamp PDFEnrique Mejia FlorezNo ratings yet
- Overview of Today's Class: 15.010: Economic Analysis For Business DecisionsDocument9 pagesOverview of Today's Class: 15.010: Economic Analysis For Business DecisionsHein Thu AungNo ratings yet
- Power of The Ocean 2 With AfL EnglishDocument33 pagesPower of The Ocean 2 With AfL EnglishTee Shi FengNo ratings yet
- 2020 - Interactive Ecommerce-1 PDFDocument53 pages2020 - Interactive Ecommerce-1 PDFTee Shi FengNo ratings yet
- Excel 4.0 Macro Functions Reference PDFDocument653 pagesExcel 4.0 Macro Functions Reference PDFSatyendra SinghNo ratings yet
- Main Riser Pull-In Winch: Refernce For CalculationsDocument1 pageMain Riser Pull-In Winch: Refernce For CalculationsTee Shi FengNo ratings yet
- DPS O&m Manual 100576Document42 pagesDPS O&m Manual 100576Tee Shi FengNo ratings yet
- Steering and Stabilisation Brochure PDFDocument24 pagesSteering and Stabilisation Brochure PDFhihihiNo ratings yet
- DIN 55474 Calculation Moisture Protection ElectronicsDocument3 pagesDIN 55474 Calculation Moisture Protection ElectronicsTee Shi FengNo ratings yet
- Mcgregor Steering GearDocument2 pagesMcgregor Steering GearTee Shi FengNo ratings yet
- Elegance-Ducted-19 11 19Document2 pagesElegance-Ducted-19 11 19Tee Shi FengNo ratings yet
- True vs. Apparent PowerDocument9 pagesTrue vs. Apparent PowerAnonymous 9feJpOwNo ratings yet
- L3 Steering Gear PDFDocument4 pagesL3 Steering Gear PDFTee Shi FengNo ratings yet
- Bop Mux Control System - OeaneeringDocument9 pagesBop Mux Control System - OeaneeringTee Shi FengNo ratings yet
- Use of The Dual-Activity Drillship As A Field Development ToolDocument15 pagesUse of The Dual-Activity Drillship As A Field Development ToolTee Shi FengNo ratings yet
- TLP Global Motion Performance Analysis ProceduresDocument8 pagesTLP Global Motion Performance Analysis ProceduresTee Shi FengNo ratings yet
- Hazop Surface Gas and Mud Handling Systems During Drilling OperationsDocument14 pagesHazop Surface Gas and Mud Handling Systems During Drilling OperationsTee Shi FengNo ratings yet
- Prediction of TLP Responses Model Tests Vs AnalysisDocument16 pagesPrediction of TLP Responses Model Tests Vs AnalysisTee Shi FengNo ratings yet
- TLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFDocument7 pagesTLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFZylyn KuaNo ratings yet
- Time-Domain Coupled Analysis of Deepwater TLP, and Verification Against Model TestsDocument8 pagesTime-Domain Coupled Analysis of Deepwater TLP, and Verification Against Model TestsTee Shi FengNo ratings yet
- Impact of Coupled Analysis On Global Performance of Deep Water Tlp'sDocument14 pagesImpact of Coupled Analysis On Global Performance of Deep Water Tlp'sTee Shi FengNo ratings yet
- TLP Rigid Riser Case StudyDocument6 pagesTLP Rigid Riser Case StudyTee Shi FengNo ratings yet
- Matterhorn Steel Catenary Risers Critical Issues and Lessons Learned For Reel-Layed SCRs To A TLPDocument16 pagesMatterhorn Steel Catenary Risers Critical Issues and Lessons Learned For Reel-Layed SCRs To A TLPTee Shi FengNo ratings yet
- Integrated Global Performance Analysis of Matterhorn SeaStar TLPDocument11 pagesIntegrated Global Performance Analysis of Matterhorn SeaStar TLPTee Shi FengNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dolni VestoniceDocument34 pagesDolni VestoniceOlha PodufalovaNo ratings yet
- Brochure en 2014 Web Canyon Bikes How ToDocument36 pagesBrochure en 2014 Web Canyon Bikes How ToRadivizija PortalNo ratings yet
- Ofper 1 Application For Seagoing AppointmentDocument4 pagesOfper 1 Application For Seagoing AppointmentNarayana ReddyNo ratings yet
- SBI Sample PaperDocument283 pagesSBI Sample Paperbeintouch1430% (1)
- Philippine Army BDU BidDocument2 pagesPhilippine Army BDU BidMaria TeresaNo ratings yet
- Indian Standard: Pla Ing and Design of Drainage IN Irrigation Projects - GuidelinesDocument7 pagesIndian Standard: Pla Ing and Design of Drainage IN Irrigation Projects - GuidelinesGolak PattanaikNo ratings yet
- Product Data Sheet For CP 680-P and CP 680-M Cast-In Firestop Devices Technical Information ASSET DOC LOC 1540966Document1 pageProduct Data Sheet For CP 680-P and CP 680-M Cast-In Firestop Devices Technical Information ASSET DOC LOC 1540966shama093No ratings yet
- Get Oracle Order DetailsDocument4 pagesGet Oracle Order Detailssiva_lordNo ratings yet
- Qad Quick StartDocument534 pagesQad Quick StartMahadev Subramani100% (1)
- Human Rights Alert: Corrective Actions in Re: Litigation Involving Financial InstitutionsDocument3 pagesHuman Rights Alert: Corrective Actions in Re: Litigation Involving Financial InstitutionsHuman Rights Alert - NGO (RA)No ratings yet
- Eye Bags ReliefDocument27 pagesEye Bags ReliefNatsu DragneelNo ratings yet
- Hydraulics Engineering Course OverviewDocument35 pagesHydraulics Engineering Course Overviewahmad akramNo ratings yet
- Template WFP-Expenditure Form 2024Document22 pagesTemplate WFP-Expenditure Form 2024Joey Simba Jr.No ratings yet
- EA Linear RegressionDocument3 pagesEA Linear RegressionJosh RamosNo ratings yet
- CBT For BDDDocument13 pagesCBT For BDDGregg Williams100% (5)
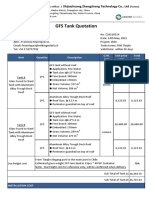
- GFS Tank Quotation C20210514Document4 pagesGFS Tank Quotation C20210514Francisco ManriquezNo ratings yet
- Technical Manual - C&C08 Digital Switching System Chapter 2 OverviewDocument19 pagesTechnical Manual - C&C08 Digital Switching System Chapter 2 OverviewSamuel100% (2)
- DOE Tank Safety Workshop Presentation on Hydrogen Tank TestingDocument36 pagesDOE Tank Safety Workshop Presentation on Hydrogen Tank TestingAlex AbakumovNo ratings yet
- British Universal Steel Columns and Beams PropertiesDocument6 pagesBritish Universal Steel Columns and Beams PropertiesjagvishaNo ratings yet
- Civil Service Exam Clerical Operations QuestionsDocument5 pagesCivil Service Exam Clerical Operations QuestionsJeniGatelaGatillo100% (3)
- Inventory ControlDocument26 pagesInventory ControlhajarawNo ratings yet
- Excess AirDocument10 pagesExcess AirjkaunoNo ratings yet
- Ecc Part 2Document25 pagesEcc Part 2Shivansh PundirNo ratings yet
- A Database of Chromatographic Properties and Mass Spectra of Fatty Acid Methyl Esters From Omega-3 ProductsDocument9 pagesA Database of Chromatographic Properties and Mass Spectra of Fatty Acid Methyl Esters From Omega-3 ProductsmisaelNo ratings yet
- Breaking NewsDocument149 pagesBreaking NewstigerlightNo ratings yet
- Beauty ProductDocument12 pagesBeauty ProductSrishti SoniNo ratings yet
- Cab&Chaissis ElectricalDocument323 pagesCab&Chaissis Electricaltipo3331100% (13)
- Oxygen Cost and Energy Expenditure of RunningDocument7 pagesOxygen Cost and Energy Expenditure of Runningnb22714No ratings yet
- Steps To Christ AW November 2016 Page Spreaad PDFDocument2 pagesSteps To Christ AW November 2016 Page Spreaad PDFHampson MalekanoNo ratings yet
- Build A Program Remote Control IR Transmitter Using HT6221Document2 pagesBuild A Program Remote Control IR Transmitter Using HT6221rudraNo ratings yet