You might also like
- PLS Toolbox Quick Reference JDocument3 pagesPLS Toolbox Quick Reference JJuan OlivaresNo ratings yet
- Flotation Column Automation State of The Art PDFDocument6 pagesFlotation Column Automation State of The Art PDFJuan OlivaresNo ratings yet
- A Parametric Study of Froth Stability and Its EffectDocument19 pagesA Parametric Study of Froth Stability and Its EffectJuan OlivaresNo ratings yet
- Validation of K-S B Relationship and Effect of Froth DepthDocument12 pagesValidation of K-S B Relationship and Effect of Froth DepthJuan OlivaresNo ratings yet
- Sem ArtDocument12 pagesSem ArtMusango LunguNo ratings yet
- Review of Froth Modelling in Steady State Flotation SystemsDocument25 pagesReview of Froth Modelling in Steady State Flotation SystemsJuan OlivaresNo ratings yet
- Validation of K-S B Relationship and Effect of Froth DepthDocument12 pagesValidation of K-S B Relationship and Effect of Froth DepthJuan OlivaresNo ratings yet
- Froth Stability, Particle Entrainment andDocument21 pagesFroth Stability, Particle Entrainment andJuan Olivares100% (1)
- The Effect of Grinding On Mill Performance at Division Salvador, Codelco-ChileDocument11 pagesThe Effect of Grinding On Mill Performance at Division Salvador, Codelco-ChileFaiz RoslanNo ratings yet
- Material Control de Lectura 4Document8 pagesMaterial Control de Lectura 4Fernando Andrés TapiaNo ratings yet
- Critical Values For A Steady State IdentifierDocument4 pagesCritical Values For A Steady State IdentifierJuan OlivaresNo ratings yet
- Sem ArtDocument12 pagesSem ArtMusango LunguNo ratings yet
- Ai in Practice Case Study On A Flotation PlantDocument8 pagesAi in Practice Case Study On A Flotation PlantJuan OlivaresNo ratings yet
- An Evaluation of Different Models of Water Recovery in Flotation-X.zhengDocument12 pagesAn Evaluation of Different Models of Water Recovery in Flotation-X.zhengJuan OlivaresNo ratings yet
- Quotation API 5l Psl1 x52 ErwDocument1 pageQuotation API 5l Psl1 x52 ErwJuan OlivaresNo ratings yet
- An Improved Model For Simulation of Flotation Circuits - J.P FerreiraDocument13 pagesAn Improved Model For Simulation of Flotation Circuits - J.P FerreiraJuan OlivaresNo ratings yet
- Optimal Design and Planning of Heap Leaching Process. Application To Copper Oxide LeachingDocument36 pagesOptimal Design and Planning of Heap Leaching Process. Application To Copper Oxide LeachingJuan OlivaresNo ratings yet
- Petroleum Fraction at Ion OverviewDocument35 pagesPetroleum Fraction at Ion Overviewphobos2000No ratings yet
- CH # 7 Separator & Slug CatcherDocument15 pagesCH # 7 Separator & Slug CatcherMuhammad Zeeshan Wasi100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Simple sensor integration in TopWin for excellent process monitoringDocument5 pagesSimple sensor integration in TopWin for excellent process monitoringgeocastellaNo ratings yet
- GCC Lab ManualDocument125 pagesGCC Lab ManualAdmin TECNo ratings yet
- Scientist ProjectDocument1 pageScientist ProjectEamon BarkhordarianNo ratings yet
- Programming Cable Users GuideDocument13 pagesProgramming Cable Users GuideSahal AhammedNo ratings yet
- How To Setup KodiDocument20 pagesHow To Setup KodiGerardo RodríguezNo ratings yet
- PH ControllerDocument29 pagesPH ControllerDavid TibleNo ratings yet
- Fundamentals of Programming: Course OutlineDocument32 pagesFundamentals of Programming: Course OutlineAngelina Febriany SimarmataNo ratings yet
- Tortoise HGDocument93 pagesTortoise HGKhanoyants M. ArmenNo ratings yet
- Zenith ERP Solutions for Staffing, Real Estate and Telecom IndustriesDocument16 pagesZenith ERP Solutions for Staffing, Real Estate and Telecom IndustriesChinmay MohapatraNo ratings yet
- Common Core Standardized Test Review Math TutorialsDocument3 pagesCommon Core Standardized Test Review Math Tutorialsagonza70No ratings yet
- Johnson's Algorithm For Optimal Scheduling Of Multi-Machine SystemsDocument8 pagesJohnson's Algorithm For Optimal Scheduling Of Multi-Machine SystemsBabyCoder HvhNo ratings yet
- Programming Logic Concepts For TCS NQTDocument39 pagesProgramming Logic Concepts For TCS NQTAjay Kumar Reddy KummethaNo ratings yet
- Manual en Individual PDFDocument34 pagesManual en Individual PDFJibu Hashim RaswiNo ratings yet
- QRS LaserJet Printers 07-28-2014Document8 pagesQRS LaserJet Printers 07-28-2014theBAUNo ratings yet
- Tn179 05 PDFDocument517 pagesTn179 05 PDFchimbwaNo ratings yet
- Questions For PMPDocument26 pagesQuestions For PMPWael_Barakat_3179100% (1)
- Determinants NotesDocument3 pagesDeterminants NotesSoham PatilNo ratings yet
- InstnwndDocument284 pagesInstnwndjwooNo ratings yet
- ResultsDocument5 pagesResultsCHEATINGBASTARDNo ratings yet
- MSIM 602 Simulation Fundamentals AssignmentDocument2 pagesMSIM 602 Simulation Fundamentals Assignmentahaque08No ratings yet
- ChatScript Basic User ManualDocument28 pagesChatScript Basic User ManualSharanya KMNo ratings yet
- Texto de Algebra Lineal U de Harvard PDFDocument47 pagesTexto de Algebra Lineal U de Harvard PDFJohn J Gomes EsquivelNo ratings yet
- Burnes 2004Document18 pagesBurnes 2004Asmadera Mat EsaNo ratings yet
- MediNotes Conversion Steps For VARsDocument9 pagesMediNotes Conversion Steps For VARsMikeNo ratings yet
- Clone of A Database On The Same HostDocument6 pagesClone of A Database On The Same HostJaved IqbalNo ratings yet
- RevitDocument433 pagesRevitmarceloubedaNo ratings yet
- BLDC Motor ControlDocument8 pagesBLDC Motor ControlSithija AlwisNo ratings yet
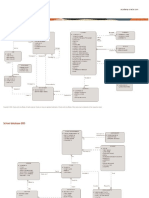
- PLSQL Schema ERD and Table DesignsDocument8 pagesPLSQL Schema ERD and Table DesignsSoham GholapNo ratings yet
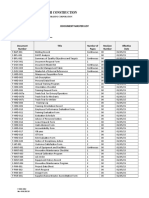
- 01 Document MasterlistDocument3 pages01 Document MasterlistHorhe SmithNo ratings yet
- DDDW 2 InglesDocument5 pagesDDDW 2 InglesJose Luis Silguero SamaniegoNo ratings yet