You might also like
- API 650 Tank Design CalculationDocument8 pagesAPI 650 Tank Design Calculationmail_younes659283% (29)
- 493 07 Pump InterDocument11 pages493 07 Pump InterAnonymous 4yJ6kHP1100% (1)
- ACCELEROMETER SEMINAR TITLEDocument13 pagesACCELEROMETER SEMINAR TITLESupriya Hegde100% (1)
- Lord - Vibration & Shock TheoryDocument43 pagesLord - Vibration & Shock TheorybobspamhereNo ratings yet
- Study On Vibration Analysis For Printed Circuit Board of An Electronic ApparatusDocument6 pagesStudy On Vibration Analysis For Printed Circuit Board of An Electronic ApparatusAnand Ras100% (1)
- Isolator Selection GuideDocument30 pagesIsolator Selection GuideRaasik Jain100% (1)
- Vibration Isolation and TransmissibilityDocument7 pagesVibration Isolation and TransmissibilitysaiyankiranNo ratings yet
- Vibration TechnologyDocument18 pagesVibration TechnologySakthimgsNo ratings yet
- Seismic Simulator Biaxial Dev - 003372Document2 pagesSeismic Simulator Biaxial Dev - 003372EZIO AUDITORENo ratings yet
- Electrical DictionaryDocument91 pagesElectrical DictionaryQudratullah EhsanNo ratings yet
- Shaking Table Model Test and Numerical Analysis of A Complex High-Rise Building - Xilin Lu, Yin Zhou, Wensheng Lu - 2007Document34 pagesShaking Table Model Test and Numerical Analysis of A Complex High-Rise Building - Xilin Lu, Yin Zhou, Wensheng Lu - 2007Martin Dario Mazo QuingrejoNo ratings yet
- Earthquake Resistant Architecture BasicsDocument15 pagesEarthquake Resistant Architecture BasicsAr Shubham JaiswalNo ratings yet
- KLA AppNote StrainRateDocument6 pagesKLA AppNote StrainRatep dNo ratings yet
- Fast-Track Troubleshooter Quick Reference GuideDocument15 pagesFast-Track Troubleshooter Quick Reference GuideScott BobarinoNo ratings yet
- Tensile Testing Basics Tips TrendsDocument5 pagesTensile Testing Basics Tips TrendsJonathan Elias MoralesNo ratings yet
- Antivibration MountsDocument6 pagesAntivibration MountsvldxbNo ratings yet
- VibrationDocument9 pagesVibrationDouglas HillNo ratings yet
- Structural Degrees of FreedomDocument24 pagesStructural Degrees of FreedomJibrilNo ratings yet
- Mts 010184Document56 pagesMts 010184mecambNo ratings yet
- Lecture 0 Appendix Intro Fluid PowerDocument61 pagesLecture 0 Appendix Intro Fluid PowerSAMUEL MAKATANENo ratings yet
- Vibration Measurement ProceduresDocument8 pagesVibration Measurement ProceduresEclipse Shu100% (1)
- SME1306 - Theory of VibrationsDocument35 pagesSME1306 - Theory of Vibrationsu2b11517No ratings yet
- Vibration Isolation TheoryDocument4 pagesVibration Isolation TheoryRa BalamuruganNo ratings yet
- Rotary ActuatorsDocument11 pagesRotary Actuatorskadir kayaNo ratings yet
- Understanding FFTs and WindowingDocument15 pagesUnderstanding FFTs and WindowingKNo ratings yet
- High Precision Position Control of Electro-Hydraulic Servo SystemDocument10 pagesHigh Precision Position Control of Electro-Hydraulic Servo Systemamin342No ratings yet
- Vibration of Single Degree Freedom SystemsDocument21 pagesVibration of Single Degree Freedom SystemsmaheshluintelNo ratings yet
- Fluids and Conditions Unit3l2Document17 pagesFluids and Conditions Unit3l2KJDNKJZEFNo ratings yet
- Introduction to Anti-Vibration Mount SelectionDocument7 pagesIntroduction to Anti-Vibration Mount SelectionmodvillamancaNo ratings yet
- Choosing The Right Accelerometer White Paper PDFDocument6 pagesChoosing The Right Accelerometer White Paper PDFRahulNo ratings yet
- Electronic FiltersDocument11 pagesElectronic FiltersJamille VillarosaNo ratings yet
- Frequently Asked Questions About Vibration: What Does It Mean To Isolate Vibration?Document8 pagesFrequently Asked Questions About Vibration: What Does It Mean To Isolate Vibration?joeeoj189189No ratings yet
- What Is Random Vibration TestingDocument4 pagesWhat Is Random Vibration TestingsaidmsrochaNo ratings yet
- CH-2 Basics of ControllersDocument14 pagesCH-2 Basics of ControllersSatya Sai Babu Yeleti100% (1)
- HPS Notes of Lecture PDFDocument63 pagesHPS Notes of Lecture PDFsbhalesh100% (2)
- Ordertracking: Users ManualDocument38 pagesOrdertracking: Users Manualbinh buiNo ratings yet
- 3 Funda Randomvibration PDFDocument19 pages3 Funda Randomvibration PDFsteve4ovenNo ratings yet
- Bulk ModulusDocument4 pagesBulk ModulusBruna MacedoNo ratings yet
- Accelerometer Selection Based On ApplicationsDocument8 pagesAccelerometer Selection Based On Applicationspatilrushal824No ratings yet
- ME 498 - 6 - Nanoindentation and NanoscratchDocument23 pagesME 498 - 6 - Nanoindentation and NanoscratchTt OwnsqqNo ratings yet
- CH 2 Principles of Hydraulics MEM 341Document23 pagesCH 2 Principles of Hydraulics MEM 341Azfar AdnanNo ratings yet
- 11 Problems - 11 Solutions: Case Histories of 11 Machinery Vibration Problems - Part 1Document7 pages11 Problems - 11 Solutions: Case Histories of 11 Machinery Vibration Problems - Part 1Ahmed El-ShafeiNo ratings yet
- Introduction To Hydraulics: Chapter-1Document51 pagesIntroduction To Hydraulics: Chapter-1KarthikNo ratings yet
- Basics Vibration MeasurementDocument5 pagesBasics Vibration MeasurementMohan Arumugavallal100% (1)
- Vibration Diagnosis Control FinalDocument19 pagesVibration Diagnosis Control Finalsham javedNo ratings yet
- Motor Quality Guide: Reliability, Life Cycle Costs, and Choosing the Right SupplierDocument12 pagesMotor Quality Guide: Reliability, Life Cycle Costs, and Choosing the Right SupplierRyan Jay100% (1)
- Bulk Modulus 1Document17 pagesBulk Modulus 1rocks100% (1)
- Notes PWM TechniquesDocument4 pagesNotes PWM TechniquesSeshan KumarNo ratings yet
- Vibration Damping: Professor Mike BrennanDocument52 pagesVibration Damping: Professor Mike Brennanpuppyarav2726No ratings yet
- Motion Technology MotorDocument8 pagesMotion Technology Motorsanu420No ratings yet
- FFT WindowsDocument7 pagesFFT WindowsA J Naveen.100% (3)
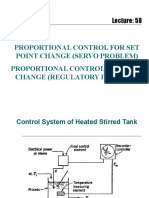
- Proportional Control For Set Point Change (Servo Problem) Proportional Control For Load Change (Regulatory Problem)Document19 pagesProportional Control For Set Point Change (Servo Problem) Proportional Control For Load Change (Regulatory Problem)Imran UnarNo ratings yet
- RMS Voltage of A Sinusoidal AC WaveformDocument8 pagesRMS Voltage of A Sinusoidal AC WaveformRoboconDKNo ratings yet
- Structural Health MonitoringFrom EverandStructural Health MonitoringDaniel BalageasNo ratings yet
- Barry Isolators Selection GuideDocument16 pagesBarry Isolators Selection GuideJason E. CortésNo ratings yet
- Isolators SelectionDocument16 pagesIsolators SelectionSree SNo ratings yet
- Chapter 22: Principles of Passive Vibration Control: BasicsDocument11 pagesChapter 22: Principles of Passive Vibration Control: BasicsAshokNo ratings yet
- Chapter 3 - Free Damped Vibrations - Mechanical VibrationsDocument21 pagesChapter 3 - Free Damped Vibrations - Mechanical Vibrationsumangthechamp100% (1)
- Vibration IsolatorsDocument27 pagesVibration Isolatorssachidananda basaral100% (2)
- Dynamics TheoryDocument5 pagesDynamics Theoryrahulsgowda.cse22No ratings yet
- Vibration Isolators FinalDocument54 pagesVibration Isolators Finalفرح تامرNo ratings yet
- Aerospace & Industry: DefinitionsDocument5 pagesAerospace & Industry: DefinitionsKALIDASS DNo ratings yet
- A Suggested Stress Analysis Procedure For Nozzle To Head Shell Element Model - A Case StudyDocument7 pagesA Suggested Stress Analysis Procedure For Nozzle To Head Shell Element Model - A Case StudyLincs lincolnNo ratings yet
- FULLTEXT01Document106 pagesFULLTEXT01Sandeep BhatiaNo ratings yet
- Quiroga 2019 J. Phys. Conf. Ser. 1160 012008Document6 pagesQuiroga 2019 J. Phys. Conf. Ser. 1160 012008Sandeep BhatiaNo ratings yet
- Paper 329Document34 pagesPaper 329Sandeep BhatiaNo ratings yet
- Irjet V3i7201 PDFDocument6 pagesIrjet V3i7201 PDFSandeep BhatiaNo ratings yet
- Stress Analysis of Process Pipe Line Systems (ASME B 31.3) in A Plant Using Caeser-IIDocument7 pagesStress Analysis of Process Pipe Line Systems (ASME B 31.3) in A Plant Using Caeser-IISandeep BhatiaNo ratings yet
- Appendix A - Tank Calculations - A4L0L6Document19 pagesAppendix A - Tank Calculations - A4L0L6Ignacio OñateNo ratings yet
- Utilization Ratio EDDocument1 pageUtilization Ratio EDSandeep BhatiaNo ratings yet
- Steady State Analysis of Water Distribution SystemsDocument3 pagesSteady State Analysis of Water Distribution SystemsSandeep BhatiaNo ratings yet
- Use of Shear Lugs For Anchorage To Concrete: January 2009Document9 pagesUse of Shear Lugs For Anchorage To Concrete: January 2009Sandeep BhatiaNo ratings yet
- Ci33 1112 Pernos de AnclajeDocument10 pagesCi33 1112 Pernos de AnclajeShadin Asari ArabaniNo ratings yet
- AISC MembersDocument22 pagesAISC MembersAvinash Pathania100% (1)
- AISC MembersDocument22 pagesAISC MembersAvinash Pathania100% (1)
- Designofelevated00tree 1911 CivilDocument134 pagesDesignofelevated00tree 1911 CivilandysupaNo ratings yet
- Basic Flowchart and It's FunctionDocument9 pagesBasic Flowchart and It's FunctionJoey Slipknot JordisonNo ratings yet
- Steady-State Analysis of Water Distribut PDFDocument9 pagesSteady-State Analysis of Water Distribut PDFSandeep BhatiaNo ratings yet
- DesignExamples 15-18Document270 pagesDesignExamples 15-18Sandeep BhatiaNo ratings yet
- New - Reinforcement of NozzleDocument31 pagesNew - Reinforcement of NozzleChagar HarshpalNo ratings yet
- Expansion Joint Automatically Locks Piping Against Reverse MovementDocument9 pagesExpansion Joint Automatically Locks Piping Against Reverse MovementSandeep BhatiaNo ratings yet
- Expansion Joint Automatically Locks Piping Against Reverse MovementDocument9 pagesExpansion Joint Automatically Locks Piping Against Reverse MovementSandeep BhatiaNo ratings yet
- API 650 Storage Tank Code GuideDocument15 pagesAPI 650 Storage Tank Code GuideDylan RamasamyNo ratings yet
- Steel Water Storage Tanks Design Construction Maintenance and Repair PDFDocument448 pagesSteel Water Storage Tanks Design Construction Maintenance and Repair PDFJiss Mathew100% (3)
- Design of liquid-storage tank: software vs Eurocode calculationsDocument13 pagesDesign of liquid-storage tank: software vs Eurocode calculationsSandeep BhatiaNo ratings yet
- Shock Chloro CalcDocument2 pagesShock Chloro CalcSandeep BhatiaNo ratings yet
- AWWA Water Loss Control Committee (WLCC) Water Audit Software v3.0Document12 pagesAWWA Water Loss Control Committee (WLCC) Water Audit Software v3.0lamosy78No ratings yet
- SP Loss WorksheetDocument9 pagesSP Loss WorksheetJojo FernandezNo ratings yet
- Shock Chloro CalcDocument2 pagesShock Chloro CalcSandeep BhatiaNo ratings yet
- Static Pressure Calculator r3 Rev1610 27Document1 pageStatic Pressure Calculator r3 Rev1610 27Dwiki Yudia BasukiNo ratings yet
- SP Loss WorksheetDocument9 pagesSP Loss WorksheetJojo FernandezNo ratings yet
- ANSYS TutorialDocument16 pagesANSYS Tutorialpriyankar007No ratings yet
- TE Radiation ModeDocument6 pagesTE Radiation ModeLaxmanNo ratings yet
- Experiment #1: Whirling of ShaftsDocument7 pagesExperiment #1: Whirling of ShaftsJibran Ansari0% (1)
- In a refrigeration plant, a section of pipe carrying the refrigerant vibrated suddenly at a compressor speed of 230 rpmDocument14 pagesIn a refrigeration plant, a section of pipe carrying the refrigerant vibrated suddenly at a compressor speed of 230 rpmHari Narayanan100% (1)
- Waves Class 11 Notes Physics Chapter 15 - Learn CBSEDocument9 pagesWaves Class 11 Notes Physics Chapter 15 - Learn CBSERishabh Singh RajputNo ratings yet
- A Complete Design Flow For Silicon PhotonicsDocument17 pagesA Complete Design Flow For Silicon PhotonicsnowdayNo ratings yet
- HFSSintro PDFDocument45 pagesHFSSintro PDFuserdceNo ratings yet
- Ashwa Riders CAE Report Analysis</h1Document15 pagesAshwa Riders CAE Report Analysis</h1Aman AwachatNo ratings yet
- Evaluation of Fatigue Life For A Large Bus by Using The Virtual Test Model (VTM)Document34 pagesEvaluation of Fatigue Life For A Large Bus by Using The Virtual Test Model (VTM)yoseikan1972No ratings yet
- OLDFIELD Improved Membrane AbsorbersDocument174 pagesOLDFIELD Improved Membrane AbsorbersAndre VareNo ratings yet
- Rife Energy Medicine Cures DiseasesDocument5 pagesRife Energy Medicine Cures DiseasesOna OnićNo ratings yet
- UiiuDocument20 pagesUiiupravi2010No ratings yet
- Fully-Coupled Fluid/Structure Vibration Analysis Using Msc/NastranDocument90 pagesFully-Coupled Fluid/Structure Vibration Analysis Using Msc/NastranMuflihMuhammadNo ratings yet
- Analysis of Motor - Pump Vibration - Kishore KaruppaswamyDocument8 pagesAnalysis of Motor - Pump Vibration - Kishore KaruppaswamyhafezasadNo ratings yet
- Rotation of Mode ShapesDocument2 pagesRotation of Mode Shapescelestinodl736No ratings yet
- Stationarywaves QuestionsDocument8 pagesStationarywaves Questionscamellia ZHOUNo ratings yet
- Effect of Pretension On Moored Ship RespDocument13 pagesEffect of Pretension On Moored Ship RespIvandito HerdayandityaNo ratings yet
- Simulation of Room Acoustics Using Comsol MultiphysicsDocument7 pagesSimulation of Room Acoustics Using Comsol MultiphysicsMallickarjuna A.SNo ratings yet
- IRC-SP-114-Seismic Design For Road BridgesDocument146 pagesIRC-SP-114-Seismic Design For Road BridgesPradeep Mishra50% (4)
- Iiest Physics Course BookletDocument6 pagesIiest Physics Course BookletGURUDUTTA PALNo ratings yet
- (1990) Random Response of Offshore Towers With Pile-Soil-Pile InteractionDocument7 pages(1990) Random Response of Offshore Towers With Pile-Soil-Pile InteractionRaghu MahadevappaNo ratings yet
- Melde's MethodDocument2 pagesMelde's MethodDR.P.V.Kanaka Rao0% (1)
- Using Adams/PostProcessor - MD Adams 2010Document244 pagesUsing Adams/PostProcessor - MD Adams 2010pkokatam100% (1)
- HOBO® Pendant® G Data Logger (UA-004-64) White Paper: Operating PrinciplesDocument14 pagesHOBO® Pendant® G Data Logger (UA-004-64) White Paper: Operating Principlesle dinh chienNo ratings yet
- 40377716Document400 pages40377716Alan DominguezNo ratings yet
- Improved Magic Formula handles inflation pressure changesDocument14 pagesImproved Magic Formula handles inflation pressure changesmilasinovicaNo ratings yet
- Static and Dynamic Analysis of A Two Wheeler Shock Absorber Using Different Materials For Helical Coil Spring PDFDocument12 pagesStatic and Dynamic Analysis of A Two Wheeler Shock Absorber Using Different Materials For Helical Coil Spring PDFMuhammad Rizki HidayatullahNo ratings yet
- Models - Aco.absorptive MufflerDocument22 pagesModels - Aco.absorptive MufflerPeterNo ratings yet
- Response of Beams Resting On Viscoelastically Damped Foundation To Moving OscillatorsDocument20 pagesResponse of Beams Resting On Viscoelastically Damped Foundation To Moving OscillatorsPranavaDartNo ratings yet