International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 653-658 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
Literature Assessment for Pose-Invariant Face Recognition
S.Jebha, P.KANNAN
PG Scholar Department of ECE, PET Engineering College, India
Professor Department of ECE, PET Engineering College, India
Abstract:
Face recognition becomes problematic when the
variation is considered across different poses. To
overcome this problem, invariant pose is considered.
For this invariant pose, Optimization algorithm is used.
Using this algorithm, frontal image is reconstructed
virtually from the profile of non-frontal image. This
literature survey gives in detail about the different
kinds of methods which are related with variant poses.
Keywords: Invariant poses, Optimization algorithm,
Fisherfaces, Appearance model, Morphable model,
Light fields, Probabilistic stack-flow.
I. INTRODUCTION
Face recognition is used in many applications
such as access control, identification systems,
surveillance, biometrics and pervasive computing. In
face recognition, pose variations is considered as one
of the important problem, which would not produce
better accuracy and performance. Face recognition
across poses is carried out in 2D and 3D models. Many
algorithms are implemented to compute 2D and 3D
models to obtain better results. The performance
degrades when there are variations in the face with
pose, illumination and expression [2]. Face recognition
algorithms such as Eigenfaces andFisherfaces[1] are
used under pose variations which produce low
recognition rates only. This algorithm cannot be
applied to 3D faces. Face recognition differ for both
2D and 3D techniques.The variations across pose and
illuminations can be handled by the algorithm which
helps to simulate the process of image formation in 3D
space, using computer graphics, and it estimates 3D
shape. This isachieved by usingmorphable model of
3D faces [4].The stereo matching [22] technique in 2D
image is to judge the similarity of two images that are
viewed from different poses. This stereo matching
helps for the purpose of arbitrary, physically valid and
continuous correspondences. GaborFisher Classifier
(GFC)method [18] is robustto illumination and
variability in facial expression. This method is applied
to feature which can be extracted from the
gaborfilterthrough Enhanced Fisher linear discriminant
Model (EFM).The patch transform [12] represents an
image intooverlapping patches that are sampled on a
regular grid. This transform helps to influence images
in the patch domain, which then begins the inverse
patch transform to synthesize modified images.In tied
factor analysis [19], the linear transformation depends
on the pose, but theloadings are constant (tied) for a
given image. So Expectation-Maximization (EM)
algorithm is usedfor the estimationof linear
transformations and noiseparameters from training
data.
II. LITERATURE REVIEW
A. Eigenfaces and Fisherfaces :
On seeing that correlation methods are
computationally expensive and require enormous
amount of storage, it is normal to go behind
dimensionality reduction schemes. A technique that is
commonly used for dimensionality reduction in
computer vision mostly in face recognition is principal
components analysis (PCA) [16].This technique selects
a linear projection and maximizes thescatter of all
projected samples by dimensionality reducing it.If
theimage is linearly projected with eigenvectors of
same dimension as in theoriginal images, then it is
known asEigenfaces.Here, the classification is
performed by means of a nearest neighbour classifier
in the reduced feature space and then the Eigenface
method is equivalent to the correlation method. A
drawback of this method is that there is unwanted
information in the scatter which is maximizednot only
to the between-class scatter that is helpful for
classification, but also for the within-class scatter for
classification purposes.Thus if PCA is applied to face
images under varyingillumination, the projection
matrix will contain Eigenface which maintains the
projectedfeature space. The points that are present in
the projected space will not beclustered and not as
good as the classes that are grimed together.
TheEigenfacemethodhas the advantage that, the
variation within classes lies in a linear subspace of the
image space. Consequently, the classes are convex and
linearly separable. Dimensionality reduction can be
done using linear projection and canconserve linear
separability. But dimensionality reduction is still a
problem in recognizing a face as it is insensitivity to
lighting conditions. Here the learning set is labelled, it
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 653-658 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
so that theinformation can be usedto reducethe
dimension of the feature in an image. So, class specific
linear methods can be used for
dimensionalityreduction and simple classifiers to
reduce thefeature space, as a result better recognition
rates can be obtained thanthe Eigenfacemethod.
Fishers Linear Discriminant (FLD) [1] is used as a
class specific method, it can shape the scatter in order
to make it additionalconsistent for classification. The
problem in face recognition is that it is difficult to
maintain the within-class scatter matrix at all times
singular.The scatter matrix is given below,
S
T
= ( )( ) (1)
Where X
k
is the N number of sample images and is
the mean images of samples.It is feasible to decide the
within-class scatter matrixof the projected samples to
compose it exactly to zero.In order to overcome the
difficulty of a singular scatter matrix Fisherface
method is used. It overcomes the problem byprojecting
the image set to a lower dimensional space and obtain
the ensuing within-class scatter matrixas
nonsingular.This is attained by using PCA to reduce
the dimensionof the feature space and thenFisherface
method is applied to reduce the dimension into non-
singular matrix.
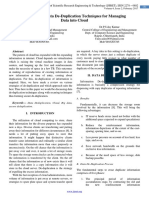
Fig 1. Comparison in the Recognition rates of
Eigenface(PCA) over Fisherface.
From the above Fig 1, Fisherfacemethodhaslow error
rates than theEigenface method and less computational
time. The disadvantage of Fisherface method is that it
produces very low recognition rates.
B. Appearance model:
Timothy F. Cootes, Gareth J. Edwards, and
Christopher J. Taylorhavedescribed a method for
matching the deformable models for shape and
appearance oforiginal images.The advance of Edwards
et al. [5], the statistical appearance models was
generated from the combination of shape model and its
variation with texture model. The term texture
meansthe intensities in the pattern or the
colorstransverselyin the patch of an image. This model
is assembled fromthe training set of annotated images
in which analogous points are marked. For
constructing a face model, the points are marked on the
face image which defines the main features.
ThenProcrustes analysis is applied for the alignment of
the sets of points in face which is represented as
vector , thus a statistical shape model is built. And
thenwarp of the training image is matched with the
image so that a shape-free patch is obtained.The
appearance model has parameter ,which controls the
shapeand texture in the model framefrom the given
equation below,
= +
= + (2)
Where, is the mean shape, is the mean texture in a
mean shapedpatch, is the texture vector and Q
s
, Q
g
are
the matrices describing the modes of variationderived
from the training set.To make a texture modelEigen-
Analysis applied to the image frame and is generated
by applying scaling and offset to the intensities.Then,
correlations are made between shape and texture and a
combined appearance model is generated. The
reconstruction can be obtained by producing the
texture in a mean shaped patch, then warping it
consequentlyto facilitate the model points lay on the
image points.The parameters of appearance model and
shape transformation gives the shape of the image
patch which aredefined by the position of the model
points in the image frame so as to represent the model.
During matching, the pixels of the imageare
sampledand projected into the texture model frame.
The elements present in a row of the matrix give the
weights to each texture sample point for the model
parameter.This method makes use of correlation
between errors in model parameters and the remaining
texture errors. The disadvantage of this method is that
it cannot beused for tree like structures with varying
numbers of branches, butit can be used for
assortedshapes which exhibit shape variation butnot a
change in topology. AAM search is slightly slower
than Active Shape Model.
C. Morphable model:
Morphable model of 3D faces captures the class-
specific properties of faces. These properties are
learned automatically from a data set of 3D scans. The
0
10
20
30
40
50
60
70
Error
Rate(%)
Reduced
Space
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 653-658 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
morphable model represents shapes and textures of
faces as vectors in a high-dimensional face space, and
involves a probability density function of natural faces
within face space.The algorithm used here estimates all
3D scene parameters automatically, including head
position and orientation, focal length of the camera,
and illumination direction. This is achieved by a new
initialization procedure that also increases robustness
and reliability of the system considerably.The new
initialization uses the image coordinates of between
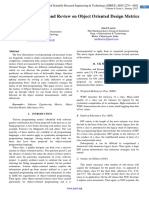
sixand eight feature points.Figure.2
In morphable face model (Fig. 2), the recognition is
based on fitting the intrinsic shape and texture of faces.
This model is independent of imaging conditions. In
the fitting algorithm, all the gallery images are
analyzed for the purpose of identification. In the probe
imagealso fitting algorithm is computed to obtain the
model coefficients. They are thencompared with all the
model coefficients obtained from gallery data to locate
the nearestneighbour. The morphable face model [4] is
based on a vector space representation of faces that is
constructed such that any bowed combinationof shape
and texture vectors.Continuous changes in the model
parameters generate a smooth transition such that each
point of the initial surface moves toward a point on the
final surface.Dense point-to-point correspondence is
crucialfor defining shape and texture vectors. 3D
morphable model isprevailing and adaptable
representation for human faces.But it requires many
manually selected landmarks for initialization.
D. Eigen light-field (ELF) method:
The importantattribute of appearance-based algorithms
is based on the recognition decision which is obtained
by considering the features as the pixel intensity values
in an image. The pixel intensities which are considered
as features in appearance-based algorithms match
upstraight to the radiance oflight emitted from the
object along certain rays in space. The light-field
specifies the radiance of light along all rays in the
scene. Hence, the light field of an object is the set of
all possible features that could beused by an
appearance-based algorithm. Any number of images
can be used, from one upwards, in both the gallery and
the probe sets. The light-field correctly rerenders
images across pose.This algorithm can use any number
of gallery images captured at arbitrary pose and any
number of probe images also captured with arbitrary
poses.
Fig 3. The average recognition rate is figured across
gallery and probe poses using Eigen Light-Fields
(ELF),FaceItand Eigenfaces.
This algorithm operates by estimating the light-field of
the subjects head. First, generic training data is used
to compute an eigen-space of head light-fields, similar
to the construction of Eigen-faces. The projection into
the eigen-space is performed by setting up a least-
squares problem and solving for the projection
coefficients. This linear algorithm can be applied to
any number of images, captured from any poses.
Finally, matching is performed by comparing the probe
and gallery light-fields using a nearest neighbour
algorithm. Capturing the complete light-field of an
object is a difficult task, primarily because it requires a
huge number of images. From Fig 3,it is inferred that
the average recognition rate by ELF methodproduces
better recognition rate[6] than other method such as
Eigenfaces and FaceIt. The Eigen Light-Field
Estimation Algorithm can be used to estimate a light-
field from a collection of images. Once the light-field
has been estimated, it can then, theoretically at least,
be used to render new images of the same object under
different poses. To use it for face recognition across
pose, it needs to perform vectorization, classification,
selecting training and testing sets. Vectorization
converts measurementsof light into features for a
pattern recognition algorithm. The Eigen Light-Fields
Algorithm can be extended to recognize faces across
pose and illumination simultaneously by generalizing
eigen light-fields to Fisher light-fields.
E. Probabilistic stack-flow:
Stack flow ascertains the viewpoint induced spatial
deformities undergone by a face at the patch level. It
helps tolearn the correspondence between patches
coming from two different viewpoints of a face.In this
stack flow,a warp is consistent across the entire stack
and aligns a patch in the stack of profile faces to a
patch in the stack of frontal faces. It achieves
resistance to noise by using the stack of images as a
constraint and avoids the averaging process. By
0.00%
20.00%
40.00%
60.00%
80.00%
Eigenfaces
FaceIt
ELF
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 653-658 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
avoiding the averaging, it is better to handle at texture
variation. The discriminative power of each
warpedpatch as a function of viewpoint, which is
known as Probabilistic stack-flow [8].The probability
distribution for patch SSD is given as,
, , { , } (3)
where is the SSD score for the r-th patch, is the
probe viewpoint and the variable refers to classes
whengallery and probe images belong to the same
subject of client or different subjects of
impostor .Here, the sum of squared differences (SSD)
is used as a similarity value between a gallery patch
and a warped probe patch.The limitation with this
method is that it is inability to handle situations where
patches become occluded at extreme viewpoints.
F. Optimization algorithm:
Even though there are many methods for face
recognition across poses, they all have low recognition
rates and attain less efficiency. In order to overcome
these problems, optimization algorithm [21] is used.
This approach consists of two methods. The first one is
the Markov Random Fields (MRF) and second one is
the Belief Propagation (BP) algorithm. This approach
can produce high recognition rates and increase in
efficiency.
Fig 4.Recognition rates ofdifferent multi-pie database
at various viewpoints.
From the above Fig 4, it is inferred that for various
methods the obtained recognition rates fluctuates. The
method MRF and BP gives better recognition rate than
other methods.
a) Markov Random Fields:
Markov random field models provide a robust and
integrated framework for early vision problems such as
stereo, optical flow and image restoration. MRF helps
to find the globally optimal set of local warps that can
be used to predict the image patches at the frontal
view. In order to reduce the effect of illumination
changes, the local patches are normalized by
subtracting the means and dividing by the standard
deviations before estimating the sum of squared
difference in the overlapping region. The optimal set
of warps is found by minimizing the energy function.
After minimizing, the energy function is given as,
{ }
= ( ) + , (4)
( , )
Where p
i
and p
j
are the warps taken from two different
nodes.
b) Belief Propagation:
Priority-BP can, thus, be viewed as a generic way for
efficiently applying belief-propagation to MRFs with
very large discrete state spaces, thus dealing, for the
first time, with what was considered as one of the main
limitations of BP up to now. At this point, it should be
noted that priority-BP, as any other version of BP, is
only an approximate global optimizer. Priority-belief
propagation (BP) algorithm, which carries 2 major
improvements over standard BP[10]: dynamiclabel
pruning and priority-based message scheduling.
Priority-BP is a generic algorithm, applicable to any
MRF energy function. BP is an iterative algorithm that
tries to find a MAP estimate by iteratively solving a
finite set of equations until a fixed point is obtained.
BP continuously propagates local messages between
the nodes of an MRF graph. At every iteration, each
node sends messages to all of its neighbouring nodes,
while it also accepts messages from these nodes.
During the forward pass vigorously reduces the
number of possible labels for each node by discarding
labels that are unlikely to be assigned to that
node.After all MRF nodes have pruned their labels at
least once then it can precomputed by reducing the
matrices of pair wise potentials and thus the speed of
BP algorithm is increased. The use of message
schedulingto determine the transmitting order for a
node based onthe confidence of that node about its
labels. The node most confident about its label should
be the first one to transmit outgoing messages to its
neighbours.
III. CONCLUSION
In this paper, literature assessment for pose-invariant
face recognition is discussed in concise. It is seen that
0.00%
20.00%
40.00%
60.00%
80.00%
100.00%
4
5
3
0
+
3
0
+
4
5
A
v
e
r
a
g
e
LGBP
3D Pose
normalizatio
n
MRF and BP
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 653-658 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
the optimization algorithm provides fine recognition
rates than any other recognition methods.
ACKNOWLEDGEMENT
Apart from the efforts of me, the success of any work
depends largely on the encouragement and guidelines
of many others. I take this occasion to express my
gratefulness to the people who have been influential in
the successful completion of this work.I would like to
extend my sincere thanks to all of them. I owe a
sincere prayer to the LORD ALMIGHTY for his kind
blessings and giving me full support to do this work,
without which this would have not been possible. I
wish to take this opportunity to express my gratitude to
all, who helped me directly or indirectly to complete
this paper.
REFERENCES
[1] P. Belhumeur, J. Hespanha, and D. Kriegman,
Eigenfaces vs. fisherfaces: Recognition using class
specific linear projection, IEEE Trans.Pattern Anal.
Mach. Intell., vol. 19, no. 7, pp. 711720, Jul. 1997.
[2] W. Zhao, R. Chellappa, P. Phillips, and A.
Rosenfeld, Face recognition: A literature survey,
ACM Comput. Surveys, vol. 35, no. 4, pp. 399458,
2003.
[3] X. Zhang and Y. Gao, Face recognition across
pose: A review, Pattern Recognit., vol. 42, no. 11, pp.
28762896, 2009.
[4] V. Blanz and T. Vetter, Face recognition based
on fitting a 3D morphable model, IEEE Trans. Pattern
Anal. Mach. Intell., vol. 25,
no. 9, pp. 10631074, Sep. 2003.
[5] T. Cootes, G. Edwards, and C. Taylor, Active
appearance models, IEEE Trans. Pattern Anal. Mach.
Intell., vol. 23, no. 6, pp. 681685, Jun. 2001.
[6] R. Gross, I. Matthews, and S. Baker, Appearance-
based face recognition and light-fields, IEEE Trans.
Pattern Anal. Mach. Intell., vol. 26, no. 4, pp. 449
465, Apr. 2004.
[7] M. Sarfraz and O. Hellwich, Probabilistic
learning for fully automatic face recognition across
pose, Image Vis. Comput., vol. 28, no. 5, pp. 744
753, 2010.
[8] A. Ashraf, S. Lucey, and T. Chen, Learning patch
correspondences for improved viewpoint invariant face
recognition, in Proc. Comput. Vis.Pattern Recognit.,
Jun. 2008, pp. 18.
[9] X. Chai, S. Shan, X. Chen, and W. Gao, Locally
linear regression for pose-invariant face recognition,
IEEE Trans. Image Process., vol. 16, no. 7, pp. 1716
1725, Jul. 2007.
[10] N. Komodakis and G. Tziritas, Image completion
using efficient belief propagation via priority
scheduling and dynamic pruning, IEEE Trans.Image
Process., vol. 16, no. 11, pp. 26492661, Nov. 2007.
[11] J. Yedidia, W. Freeman, and Y. Weiss,
Understanding belief propagation and its
generalizations, Expl. Artif.Intell. New Mill., vol. 2,
pp. 239269, Nov. 2003.
[12] T. Cho, S. Avidan, and W. Freeman, The patch
transform, IEEE Trans. Pattern Anal. Mach. Intell.,
vol. 32, no. 8, pp. 14891501, Aug. 2010.
[13] V. Blanz and T. Vetter, A morphable model for
the synthesis of 3D faces, in Proc. SIGGRAPH Conf.,
1999, pp. 187194.
[14] W. Zhang, S. Shan, W. Gao, X. Chen, and H.
Zhang, Local gabor binary pattern histogram
sequence (LGBPHS): A novel non statistical model
FRO face representation and recognition, in Proc. Int.
Conf. Comput.Vis., 2005, pp. 786791.
[15] H. Gao, H. Ekenel, and R. Stiefelhagen, Pose
normalization for local appearance-based face
recognition, in Proc. Int. Conf. Adv. Biometr., 2009.
[16] T. Kanade and A. Yamada, Multisubregion
based probabilistic approach toward pose-invariant
face recognition, in Proc. Symp. Comput. Int.Robot.
Autom., Jul. 2005, pp. 954959.
[17] S. Biswas and R. Chellappa, Pose-robust albedo
estimation from asingle image, in Proc. Comput. Vis.
Pattern Recognit., Jun. 2010,pp. 26832690.
[18] C. Liu and H. Wechsler, Gabor feature based
classification using the enhanced fisher linear
discriminant model for face recognition, IEEETrans.
Image Process., vol. 11, no. 4, pp. 467476, Apr. 2002.
[19] S. Prince, J. Elder, J. Warrell, and F. Felisberti,
Tied factor analysis for face recognition across large
pose differences, IEEE Trans. PatternAnal. Mach.
Intell., vol. 30, no. 6, pp. 970984, Jun. 2008.
[20] R.A. Fisher, The Use of Multiple Measures in
Taxonomic Problems, Ann. Eugenics, vol. 7, pp. 179-
188, 1936
[21] HuyThoHoand Rama Chellappa, Pose-Invariant
Face Recognition Using Markov Random
Fields,IEEE Trans. Image Process., vol. 22, no. 4,
Apr.2013.
[22] C. Castillo and D. Jacobs, Using stereo
matching with general epopolar geometry for 2D face
recognition across pose, IEEE Trans. PatternAnal.
Mach. Intell., vol. 31, no. 12, pp. 22982304, Dec.
2009.
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 653-658 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
Fig 2.Morphable face model performed by the comparison of model coefficients.
Database of
3D scans
Morphable
face model
Fitting Gallery
images
Probe
image
Fitting Model
coefficients
Model
coefficients
Compare
Identity
You might also like
- Thermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue EngineeringDocument5 pagesThermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue Engineeringijsret100% (1)
- Consruction of A Direct Solar Dryer For Perishable Farm ProductsDocument9 pagesConsruction of A Direct Solar Dryer For Perishable Farm ProductsijsretNo ratings yet
- A Systematic Literature Review On Network Attacks, Classification and Models For Anomaly-Based Network Intrusion Detection SystemsDocument7 pagesA Systematic Literature Review On Network Attacks, Classification and Models For Anomaly-Based Network Intrusion Detection SystemsijsretNo ratings yet
- A Review On Data De-Duplication Techniques For Managing Data Into CloudDocument4 pagesA Review On Data De-Duplication Techniques For Managing Data Into CloudijsretNo ratings yet
- Design and Manufacture of Carbon-Free CarDocument3 pagesDesign and Manufacture of Carbon-Free CarijsretNo ratings yet
- A Review of Matrix Multiplication in Multicore Processor Using Interconnection NetworkDocument6 pagesA Review of Matrix Multiplication in Multicore Processor Using Interconnection NetworkijsretNo ratings yet
- An Approach To Bug Triage: A ReviewDocument4 pagesAn Approach To Bug Triage: A ReviewijsretNo ratings yet
- CHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.Document5 pagesCHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.ijsretNo ratings yet
- A Review On Natural Fibre Polymer CompositesDocument6 pagesA Review On Natural Fibre Polymer CompositesijsretNo ratings yet
- A Review of Large-Scale RDF Document Processing in Hadoop MapReduce FrameworkDocument4 pagesA Review of Large-Scale RDF Document Processing in Hadoop MapReduce FrameworkijsretNo ratings yet
- Mechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesDocument6 pagesMechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesijsretNo ratings yet
- A Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentDocument5 pagesA Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentijsretNo ratings yet
- An Augmented Anomaly-Based Network Intrusion Detection Systems Based On Neural NetworkDocument6 pagesAn Augmented Anomaly-Based Network Intrusion Detection Systems Based On Neural NetworkijsretNo ratings yet
- Source Identification For Anonymous Attacks With Deterministic Packet MarkingDocument4 pagesSource Identification For Anonymous Attacks With Deterministic Packet MarkingijsretNo ratings yet
- Comparative Study and Review On Object Oriented Design MetricsDocument4 pagesComparative Study and Review On Object Oriented Design MetricsijsretNo ratings yet
- Comparative Study and Review On Object Oriented Design MetricsDocument4 pagesComparative Study and Review On Object Oriented Design MetricsijsretNo ratings yet
- Solving A Decision Making Problem Using Weighted Fuzzy Soft MatrixDocument5 pagesSolving A Decision Making Problem Using Weighted Fuzzy Soft MatrixijsretNo ratings yet
- Blending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsDocument11 pagesBlending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsijsretNo ratings yet
- Echo Cancellation System in VOIP Using MATLABDocument3 pagesEcho Cancellation System in VOIP Using MATLABijsretNo ratings yet
- A Review On Fingerprint Detection and Recognization TechniquesDocument4 pagesA Review On Fingerprint Detection and Recognization TechniquesijsretNo ratings yet
- Comparison of Workpiece Geometry and Its Effects On ECAP Process by FEADocument5 pagesComparison of Workpiece Geometry and Its Effects On ECAP Process by FEAijsretNo ratings yet
- Augmentation Heat Transfer in A Circular Tube Using Conical Ring and Twisted Tape InsertDocument8 pagesAugmentation Heat Transfer in A Circular Tube Using Conical Ring and Twisted Tape InsertijsretNo ratings yet
- A Review On Face Detection and Recognization TechniquesDocument4 pagesA Review On Face Detection and Recognization TechniquesijsretNo ratings yet
- Automated Personalized Face Detection Using Viola DetectorDocument5 pagesAutomated Personalized Face Detection Using Viola DetectorijsretNo ratings yet
- Experimental Investigation and Numerical Simulation of Marble Dust Filled Aramid Fibre Reinforced Epoxy Composite For Wind Turbine Blade ApplicationDocument9 pagesExperimental Investigation and Numerical Simulation of Marble Dust Filled Aramid Fibre Reinforced Epoxy Composite For Wind Turbine Blade ApplicationijsretNo ratings yet
- Demographic Differences in Postgraduate Students' Attitudes and Use of ICT Facilities in Rivers State University of Science and Technology, Port HarcourtDocument6 pagesDemographic Differences in Postgraduate Students' Attitudes and Use of ICT Facilities in Rivers State University of Science and Technology, Port HarcourtijsretNo ratings yet
- Content Based Image Retrieval Using Color FeatureDocument6 pagesContent Based Image Retrieval Using Color FeatureijsretNo ratings yet
- Numerically Investigating Effects of Channel Angle, Friction and Ram Velocity On Strain Homogeneity in EcapDocument4 pagesNumerically Investigating Effects of Channel Angle, Friction and Ram Velocity On Strain Homogeneity in EcapijsretNo ratings yet
- Strategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaDocument6 pagesStrategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaijsretNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Personal Skills Worksheet for Coding Career OptionsDocument2 pagesPersonal Skills Worksheet for Coding Career OptionsLucky ManNo ratings yet
- Bitalag Integrated School Alumni Tracer With Sms NotificationDocument4 pagesBitalag Integrated School Alumni Tracer With Sms NotificationflashNo ratings yet
- The Ultimate Guide To Sales SuccessDocument11 pagesThe Ultimate Guide To Sales SuccessVyNo ratings yet
- TIB TRA 5.9.0 RelnotesDocument152 pagesTIB TRA 5.9.0 Relnoteseden4872No ratings yet
- Hw5 SolutionDocument11 pagesHw5 SolutionTun LeNo ratings yet
- Simplis SyntaxDocument36 pagesSimplis SyntaxMindra JayaNo ratings yet
- Digital Modes. Send and Receive MoneyDocument7 pagesDigital Modes. Send and Receive MoneyJayanthikaa SekharNo ratings yet
- EXOS User Guide 22 1 PDFDocument1,686 pagesEXOS User Guide 22 1 PDFixNo ratings yet
- Skystone 1-Page FTC Summary VDocument1 pageSkystone 1-Page FTC Summary Vapi-476296531No ratings yet
- Digits and Place ValueDocument8 pagesDigits and Place ValueRizky DestyniaNo ratings yet
- IDF CurveDocument12 pagesIDF CurveArunima Gupta100% (1)
- Topas 6 Whats NewDocument30 pagesTopas 6 Whats NewEduardo ArdilesNo ratings yet
- WellCost Data SheetDocument4 pagesWellCost Data SheetAmirhosseinNo ratings yet
- Some New Kinds of Connected Domination in Fuzzy GraphsDocument11 pagesSome New Kinds of Connected Domination in Fuzzy GraphsIOSRjournal100% (1)
- The Age of PersonalizationDocument19 pagesThe Age of PersonalizationAyushmn Sikka100% (1)
- Warning Read Before Playing: Take Scrabble Interactive 2007 Edition To The Next Level!Document11 pagesWarning Read Before Playing: Take Scrabble Interactive 2007 Edition To The Next Level!Adrian Jonathan LouisNo ratings yet
- Cantas Company Profile 01oct2019Document10 pagesCantas Company Profile 01oct2019Fatih CahyoNo ratings yet
- Jade Boodram CVDocument2 pagesJade Boodram CVapi-353816172No ratings yet
- My Learning Journey ReflectionDocument2 pagesMy Learning Journey Reflectionapi-486217715No ratings yet
- PROFINET Field Devices: Recommendations For Design and ImplementationDocument44 pagesPROFINET Field Devices: Recommendations For Design and Implementationfabiosouza2010No ratings yet
- Mfi Custom SensorsDocument10 pagesMfi Custom SensorseJc2No ratings yet
- ConclusionDocument1 pageConclusionParas JatanaNo ratings yet
- Tanglewood Case7Document11 pagesTanglewood Case7Abhinay KumarNo ratings yet
- Computer Programming Laboratory Experiment # 1: Pointers I ObjectivesDocument5 pagesComputer Programming Laboratory Experiment # 1: Pointers I ObjectivesmivriNo ratings yet
- 309-دليل المزارع في تسميد الأشجار المثمرة PDFDocument23 pages309-دليل المزارع في تسميد الأشجار المثمرة PDFMed Moussaoui50% (2)
- Oracle Approvals ManagementDocument22 pagesOracle Approvals Managementvinnisharma0% (1)
- NIPO ODIN Scripter's GuideDocument416 pagesNIPO ODIN Scripter's GuideAndreea Georgiana Ilie-Postolache100% (2)
- Swot AnalysisDocument4 pagesSwot AnalysisAnonymous Cy9amWA9No ratings yet
- OS_ISO_CollectionDocument10 pagesOS_ISO_CollectionWin TecNo ratings yet