International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 677-682 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
A Literature survey for Object Recognition using Neural
Networks in FPGA
T.DaslinPonSanthosh,P.KANNAN
PG Scholar Department of ECE, PET Engineering College, India
Professor Department of ECE, PET Engineering College, India
Abstract---The Recognition of Objects is considered as
difficult one in Image Processing. It includes recognition
of face,iris,cars,airplanes,etc.For object recognition,
many neural networks in FPGA have been proposed. But
these neural network methods have high computational
complexity with high computation time and also reduce
the number of images recognized per second in object
recognition. Hierarchical Model and X model (HMAX
model) is a biologically inspired model which is used to
improve above all complexities in old methods. This
literature survey, discusses all the existing neural
networkmethods in FPGA and their performance.
Keywords--- FPGA,HMAX model,Object Recognition.
1. INTRODUCTION
In Image Processing, Object Recognition plays a
major role. This object recognition involves the
recognition of face, iris, fingerprint, vehicle, etc and also
it involves all kind of image and video tracking. The
object recognition is done by using machines also. It
involves hardware implementation and it has interaction
with all kind of environment. The Field Programmable
Gate Array (FPGA) consists of logiccomponents which
are used to perform complex mathematical functions. It
is suitable for the implementation of matrix algorithms.
FPGA provide the advantage of the parallelism, low
cost, and low power consumption. The object
recognition need to face the following problems: the
object appearance must be changed depending on its
position, scaling and orientations. This kind of object
recognition is done by using cortex like mechanisms [2].
In this mechanism, it has the operation similar to human
cortex and recognizes the object of different orientations.
Itneeds only less number of training samples to
recognize the object. But it is suitable only for the feed
forward methods. A reconfigurable FPGA is obtained by
the multi layer feed forward neural network [7]. It has a
single largest layer which behaves like different layers.
Therefore the resource required must be low. The
computational complexity is increased by using a single
layer for all operations. A scale and rotation invariant
feature detection is done by Scale Invariant Feature
Transform (SIFT).It is applied to Simultaneous
Localization and Mapping (SLAM) problem
[4].Restricted Boltzmann Machine [5] is an
unsupervised learning method and it is to provide high
performance reconfigurable architecture. It is a divide
and conquers method. It does not need any multipliers
because it uses logic gates. It does not have any
pipelined architecture.
2. LITERATURE REVIEW
MULTILAYER PERCEPTRON-BACK PROPAGATION
(MLP-BP):
An MLP[9] network contains neurons structured
in parallel layers, from inputs to outputs. The layers are
numbered 0 to Mand the neurons are numbered 1 to
N.When used in conjunction with the error
backpropagation (BP)algorithm, each neuron contains
two key arithmetic functionswhich perform forward and
backward computations. The forward computation step
uses internal weights associated with each neuron for
calculating the neurons output.The forward computation
is given as,
( )
=
( )
= (
( )
( )
( )
+
( )
(1)
Where,
s=1,2,..M Network layers;
M Total number of layers;
N
(s-1)
Number of neurons in layer (s-1);
O
k
(s)
Output of the current neuron;
fActivation function
H
k
(s)
Weighted input sum;
o
j
(s-1)
Output of the jth neuron;
w
kj
(s)
Synaptic weight;
w
ko
(s)
Bias weight;
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 677-682 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
The backwardcomputation step compares the
networks overall output to a target, computes an error
gradient, and propagates the error through layers by
adjusting each neurons weights to correct for it.
Backward computation also involves the updation of all
weights as,
( )
( + 1) =
( )
( ) +
( )
( ) (2)
However, when reviewing the mathematical
properties of the relationship of outputs from inputs, a
network with number of layers can be fit into a network
with two layers, namely one hidden and one output
layer, withoutloss of these properties. This comes about
from the fact that eachoutput of the network must be
dependent on a nonlinear combination of any or all
inputs. While a network with many hidden layers can
learn complex nonlinear inputoutput
relationshipsefficiently (with few neurons in each layer),
the same relationships can be learned with a two-layer
topology, though using more neurons in each layer.
By this property, the VHDL network can be
constructed, and is designed to be a two-layer
structure.MLP-BP networks should have a high
precision. Range can be limited as long as inputs and
outputs are normalized since weights should be limited
for learning progress. The occupied area of an FPGA-
based MLP-BP is proportional to the multiplier used.
3. VISUAL CORTEXLIKE MECHANISM:
This system follows the Feedforward path of object
recognition in cortex that accounts for the first 100-200
milliseconds of processing in the ventral stream of
primate visual cortex. The model itself attempts to
summarize in a quantitative way a core of well-accepted
facts about the ventral stream in the visual cortex[2].
First, visual processing is hierarchical, aiming to build
invariance to position and scale first and then to
viewpoint and other transformations. Second, along the
hierarchy, the receptive fields of the neurons (i.e., the
part of the visual field that could potentially elicit a
response from the neuron) as well as the complexity of
their optimal stimuli (i.e., the set of stimuli that elicit a
response of the neuron) increases.
Third, the initial processing of information is
Feedforward (for immediate recognition tasks, i.e., when
the image presentation is rapid and there is no time for
eye movements or shifts of attention). Fourth, Plasticity
and learning probably occurs at all stages and certainly
at the level of Infero Temporal (IT) Cortex and
prefrontal cortex (PFC), the top-most layers of the
hierarchy.
In its simplest form, the model consists of four
layers of computational units, where simple S units
alternate with complex C units. The S units combine
their inputs with a bell-shaped tuning function to
increase selectivity. TheC units pool their inputs through
a maximum (MAX) operation, thereby increasing
invariance.
These Cortex like mechanism have the
disadvantage of it is used only for the recognition of
texture-based objects and shape-based objects.
4. LAYER-MULTIPLEXED FEEDFORWARD
NEURAL NETWORK:
In order to implement a given NN of any size
with minimum hardware, the concept of multiplexing the
layers of NN [7] is used. Layer multiplexing is the
implementation of the single largest layer (i.e., layer
with maximum neurons) with each neuron having the
maximum number of inputs and a control block to
coordinate them. Here the largest layer has eight neurons
and the largest number of inputs to a neuron in the
network is eight. Hence, for the considered example,
eight neurons with each neuron having eight inputs is
identified as the single largest layer for implementation.
The implemented single layer is multiplexed to execute
the functions of all layers of the network. The layer
multiplexing requires an additional control block to
coordinate the computation of every layer of NN. Hence,
realization of complete network with a single layer
implementation leads to a considerable resource
reduction of FPGA.
The largest layer with each neuron having the
maximum number of inputs is implemented in this
method. A start signal is given to the control block to
initiate the operation of the network. The control block
places simultaneously the correct set of inputs, weights,
and biases to every neuron of the layer. The results ofthe
neurons are computed parallel and sent to the layer
control block to be provided as inputs to the next layer.
Once the complete network is computed, the end of
computation (EOC) signal is issued to latch the output of
the NN.
Four different network architectures are chosen
such that for all the networks the single largest layer
contains five neurons and each neuron has eight inputs.
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 677-682 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
All those NNs have eight inputs and three outputs. The
log sigmoid excitation function is used for the hidden
layers and the linear excitation function is used for the
output layer. The choice of networks is to illustrate the
saving in resource, which increases as the number of
layers increases.
The implementation includes the single largest
layer and a control block. The layer control block
coordinates the computation of the different layers by
placing the appropriate inputs, weights, biases, and value
of excitation function (from LUT) for each layer.
For good recognition rate ,it need more resource and
high cost.It alsoincrease the computational complexity.
5. SCALE INVARIANT FEATURE TRANSFORM:
The SIFT algorithm is used for scale end
rotation invariant feature detection system[13]. The
algorithm is divided into three main stages: the first one
identifies pixel candidates to be a feature, the next one
then applies a set of tests to verify whether the
candidates are stable in relation to image transformations
in order to accept or reject them. Having detected stable
features, the final stage generates a descriptor/signature
to be associated with the feature.
Fig 1 Block Diagram used for detection in SIFT
The above block diagram explains about the
operations used to detect features in an image by six
gaussian smoothed images.The efficient solution to
detect features, is provided by SIFT algorithm. However
it has high computational cost caused mainly by the
Gaussian filter cascade and the keypoint detection with
stability checks. A system configured with 3 octaves and
6 scales per octave based only on software takes 1.1s to
extract 514 features froman image of 320240 pixels in
an Intel Core 2 1.66GHz processor SIFT[4] consists of
three blocks in hardware (DoG, OriMag, and Kp)
andone in software (NIOS II). The DoG block receives
as input apixel stream from a camera and performs two
operations, theGaussian filter and the difference of
Gaussian, whose resultsare then sent to the OriMag and
Kp blocks, respectively. TheOriMag computes the pixel
orientation and gradient magnitudewhile the Kp block
detects keypoints and realizes the stabilitychecks to
classify keypoints as features. Finally, the
softwareblock, based on the NIOS II soft-core processor,
generates adescriptor for each feature detected by the Kp
block based onthe pixel orientation and gradient
magnitude produced by theOriMag block.
The disadvantage of SIFT is,for 320*240 pixels image,it
detect at a rate of 30 frames /sec only.(i.e)more time
consumption as 33ms.
6. RESTRICTEDBOLTZMANN MACHINE (RBM):
A RBM[5] is a generative, stochastic neural
network architecture consisting of two layers of nodes
representing visible and hidden variables. This work
focuses on the family of RBMs where both the visible
and hidden variables have binary states. There are
weighted connections between every node in opposite
layers, and no connections between any nodes in the
same layer. Biases are represented by setting the first
node.
The following notation system will be used: vi
and hj are the binary states of the ith and jth node, where
i= {1,I} and j= {1...J}, in the visible and hidden
layer, respectively; wi,j is the connection weight
between the ith and jth node. Alternating Gibbs
Sampling (AGS) and Contrastive- Divergence learning
(CD) has been found to be an effective process to
determine the node states and update the weight
parameters [8], respectively.
AGS is divided into two phases, generate and
reconstruct phases. During the generate phase, the
visible layer is clamped and used to determine the node
states of the hidden layer. In the reconstruction phase,
the opposite occurs by clamping the hidden layer and
reconstructing the visible nodes. Here partition of RBM
is not done properly.Uses only binary valued node.It
doesnt have pipelined architecture.
7. HMAX MODEL:
Hierarchical model and X(HMAX) model[1]is
used for biologically inspired model.HMAX is
traditionally known to achievehigh accuracy in visual
object recognition tasks at the expenseof significant
computational complexity.It is best to implement in
Source
Six Gaussian
cascades
Difference of
Gaussian(DoG)
Select feature with
maximum DoG
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 677-682 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
Field Programmable Gate Array (FPGA) than the above
methods.Ithas two main stages, each consisting of a
simple and complex sub stage. It is given as Simple-1
(S1), Complex-1 (C1), Simple-2 (S2), and Complex-2
(C2).
8. S1 Filters:
The S1 layer consists of directionally selective Gabor
receptive fields. Here the cells are implemented at four
different orientations (0, 45, 90 and 135). Because of
symmetry, we need not compute cells at orientations at
or above 180. Each orientation is implemented at 16
different scales and at every location in the image where
full support is available. The equations for the filters are
the product of a cosine function and a Gaussian
weighted envelope
( , ) = cos
2
(3)
where,
= cos + sin
= sin + cos
Here, determines the spatial frequency at the filters
peakresponse, specifies the radius of the Gaussian
window, and squeezes or stretches the Gaussian
window in the y0-directionto create an elliptical window.
For the 0 and 90 cases, wecan easily rewrite this
equation as product of two separatefunctions as shown in
(2). The 45 and 135 terms are notseparable unless we
change the Gaussian weighting functionto an isotropic
function by specifying = 1. By doing this,we arrive at
the equations for the 45 and 135 filters shownbelow
( , ) = ( , ) ( , )
( , ) = ( , ) ( , )
( , ) = ( , ) ( , ) + ( , ) ( , )
( , ) = ( , ) ( , ) ( , ) ( , )
( , ) =
( )
cos(
2
)
( , ) =
( )
( , ) =
( )
sin(
2
)
Here, (x, y) is the location of the kernel value within
thefilter, O(x, y) is an odd Gabor filter, E(x,y) is an even
Gabor filter, and G(x, y) is a pure Gaussian filter.In this
model,the filters are modeled in seperable manner(i.e)it
is implemented as two passes of a 1-D filter than one
pass of a 2-D filter.
= 4 [( ) ] = 36416
= 4 [2 ( ) ] = 2816
where( j ) is the side length of filter j.Using separable
filters reduces the number of requiredMACfrom 36 416
down to 2816.
C1:
The C1 layer requires finding the maximum S1
responseover a region of 2_ 2_ and subsampling every
_ pixelsin both x and y.It eliminates theneed to store
nonmaximal S1 results.Thecomputation in C1 is
performed on all four orientationsin parallel. Each time
C1 finishes computing the results for asize band, a flag
is set that indicates to S2 that it can begin computation
on that size band.
S2:
The data coming into S2 has already beenreduced by
taking the maximum across a local pool andsubsampling
in C1, the S2 layer is where most of the
computationtakes place. Since S2 patchesare simply
portions of previously computed C1 outputs, thenumber
of bits required to store each patch coefficient is 16.The
closeness of a patch to a C1 region is computed as the
Euclidean distance between the patch and that region.It
uses 640 multipliers and requires that 640
patchcoefficients be read every clock cycle. Patch
coefficients arestored in the FPGAs internal block
RAM since the bandwidthto external RAM would not
allow such high data rates.
C2:
C2 simply consists of a running minimum for each S2
patch,computed by comparing new S2 results with the
previouslystored S2 minimum. This is performed for all
320 S2 patches of the current size simultaneously.
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 677-682 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
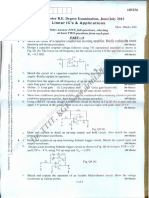
Fig 2 Accuracy comparison
The above figure explains about the comparison between
the Cortex like mechanism,HMAX using CPU,HMAX
using FPGA.From the figure,weobtain that the object
recognition by using FPGA have more accuracies in
recognition of airplanes and motorbikes.It also have the
overall accuracy of 47.2% at a speed of 5.3ms.HMAX in
FPGA is faster than HMAX CPU and provide a
recoginition rate of 190 images/sec.
9. CONCLUSION
In this paper,a brief literature survey for object
recognition using neural networks is discussed
elaborately.From this study it is concluded that all the
neural network methods in FPGA like MLP-
BP,RBM,spiking neural networks,and feed forward
neural networks provide less recognition rate than
HMAX model.
ACKNOWLEDGEMENT
Apart from my efforts, the success of any work
depends on the support and guidelines of others. We take
this opportunity to express my gratitude to the people
who have been supported us in the successful
completion of this work. We owe a sincere prayer to the
LORD ALMIGHTY for his kind blessings without
which this would not have been possible. We wish to
take this opportunity to express my gratitude to all who
have helped us directly or indirectly to complete this
paper.
REFERENCES
[1] Garrick Orchard, Jacob G. Martin, R. Jacob
Vogelstein, and Ralph Etienne-Cummings, Fellow,
IEEE Fast Neuromimetic Object Recognition Using
FPGA Outperforms GPU Implementations, IEEE
Trans. Neural Netw. and Learning Syst, VOL. 24,
NO. 8, AUGUST 2013.
[2] T. Serre, L. Wolf, S. Bileschi, M. Riesenhuber, and
T. Poggio, Robustobject recognition with cortex-
like mechanisms, IEEE Trans. PatternAnal. Mach.
Intell., vol. 29, no. 3, pp. 411426, Mar. 2007.
[3] J. Kim, M. Kim, S. Lee, J. Oh, K. Kim, and H. Yoo,
A 201.4 GOPS496 mW real-time multi-object
recognition processor with bio-inspiredneural
perception engine, IEEE J. Solid-State Circuits,
vol. 45, no. 1,pp. 3245, Jan. 2010.
[4] V. Bonato, E. Marques, and G. Constantinides, A
parallel hardwarearchitecture for scale and rotation
invariant feature detection, IEEETrans. Circuits
Syst. Video Technol., vol. 18, no. 12, pp. 1703
1712,Dec. 2008.
[5] D. Le Ly and P. Chow, High-performance
reconfigurable hardwarearchitecture for restricted
boltzmann machines, IEEE Trans. NeuralNetw.,
vol. 21, no. 11, pp. 17801792, Nov. 2010.
[6] M. Pearson, A. Pipe, B. Mitchinson, K. Gurney, C.
Melhuish,I. Gilhespy, and M. Nibouche,
Implementing spiking neural networksfor real-time
signal-processing and control applications: A
modelvalidatedFPGA approach, IEEE Trans.
Neural Netw., vol. 18, no. 5,pp. 14721487, Sep.
2007.
[7] S. Himavathi, D. Anitha, and A. Muthuramalingam,
Feedforwardneural network implementation in
FPGA using layer multiplexing foreffective resource
utilization, IEEE Trans. Neural Netw., vol. 18, no.
3,pp. 880888, May 2007.
[8] D. Geman and S. Geman, Stochastic Relaxation,
Gibbs Distributions,and the Bayesian Restoration of
Images, IEEE Transactions on PatternAnalysis and
Machine Intelligence, vol. 6, no. 6, pp. 721741,
1984.
[9] A.Savich, M. Moussa, and S. Areibi, The impact of
arithmetic representation on implementing MLP-BP
on FPGAs: A study, IEEE Trans. Neural Netw.,
vol. 18, no. 1, pp. 240252, Jan. 2007.
[10] M. Riesenhuber and T. Poggio, Hierarchical
Models of ObjectRecognition in Cortex, Nature
Neuroscience, vol. 2, no. 11,pp. 1019-1025, 1999.
90
91
92
93
94
95
96
97
98
99
100
101
Cortex
Mechanism[6]
HMAX CPU[23]
HMAX FPGA
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 10 pp 677-682 January 2014 www.ijsret.org ISSN 2278 0882
IJSRET @ 2014
[11] T. Serre, M. Kouh, C. Cadieu, U. Knoblich, G.
Kreiman, and T.Poggio, A Theory of Object
Recognition: Computations andCircuits in the
Feedforward Path of the Ventral Stream in
PrimateVisual Cortex, AI Memo 2005-036/CBCL
Memo 259, MassachusettsInst. of Technology,
Cambridge, 2005.
[12] R. Hess, SIFT feature detector (source code),
2007, version: 1.1.1.[Online]. Available:
http://web.engr.oregonstate.edu/
[13] D. Lowe, Distinctive image features from
scale-invariant keypoints,International Journal of
ComputerVision, vol. 60, no. 2, pp. 91110,January
2004.
[14] H. Bay, T. Tuytelaars, and L. Van Gool, SURF:
Speeded-up robust features, Comput. Vis. Image
Understand., vol. 110, no. 3, pp. 346359, 2008.
[15] K. Jarrett, K. Kavukcuoglu, M. Ranzato, and Y.
LeCun, What is the best multi-stage architecture for
object recognition? in Proc. 12th IEEE Int. Conf.
Comput. Vis., Oct. 2009, pp. 21462153.
[16] T. Serre, A. Oliva, and T. Poggio, A
feedforward architecture accounts for rapid
categorization, Proc. Nat. Acad. Sci., vol. 104, no.
15, pp. 64246429, 2007.
[17] J. Mutch and D. G. Lowe, Multiclass object
recognition with sparse, localized features, in Proc.
IEEE Conf. Comput. Vis. Pattern Recognit., Jun.
2006, pp. 1118.
[18] S. Chikkerur. (2008). CUDA Implementation of
a Biologically Inspired Object Recognition System
[Online]. Available: http://code.google.com/p/cbcl-
model-cuda/
[19] J. Mutch, U. Knoblich, and T. Poggio, CNS: A
GPU-based framework for simulating cortically-
organized networks, Center for Biol. Comput.
Learning, Massachusetts Institute of Technology,
Cambridge, MA, USA, Tech. Rep. MIT-CSAIL-TR-
2010-013, Feb 2010.
[20] H. Sedding, F. Deger, H. Dammertz, J. Bouecke,
and H. Lensch, Massively parallel multiclass object
recognition, in Proc. Vis., Model., Visualizat.
Workshop, 2010, pp. 251257.
[21] J. Kim, E. Park, X. Cui, H. Kim, and W. Gruver,
A fast feature extraction in object recognition using
parallel processing on CPU and GPU, in Proc.
IEEE Int. Conf. Systems, Man Cybern., Oct. 2009,
pp. 38423847.
[22] S. Warn, W. Emeneker, J. Cothren, and A.
Apon, Accelerating SIFT on parallel architectures,
in Proc. IEEE Int. Conf. Cluster Comput., Sep.
2009, pp. 14.
[23] J. Mutch and D. G. Lowe, Multiclass object
recognition with sparse,localized features, in Proc.
IEEE Conf. Comput. Vis. Pattern Recognit.,Jun.
2006, pp. 1118.
You might also like
- Djs 1000 Maintenance MatérielDocument64 pagesDjs 1000 Maintenance MatérielTechnique VSSNo ratings yet
- Design of VLSI Architecture For A Flexible Testbed of Artificial Neural Network For Training and Testing On FPGADocument7 pagesDesign of VLSI Architecture For A Flexible Testbed of Artificial Neural Network For Training and Testing On FPGAInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- MS 1013igDocument30 pagesMS 1013igkristoforos100% (3)
- Chapter13 Transceiver Design ExampleDocument72 pagesChapter13 Transceiver Design ExampleNikunj ShahNo ratings yet
- Charotar University of Science and Technology Faculty of Technology and EngineeringDocument10 pagesCharotar University of Science and Technology Faculty of Technology and EngineeringSmruthi SuvarnaNo ratings yet
- Final Drawing-R5D2013Document79 pagesFinal Drawing-R5D2013batizap batizapNo ratings yet
- L&T PresentationDocument124 pagesL&T Presentationrajib ranjan panda100% (1)
- Deep Learning NotesDocument44 pagesDeep Learning NotesAJAY SINGH NEGI100% (1)
- Anfis NoteDocument15 pagesAnfis NoteNimoNo ratings yet
- Strategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaDocument6 pagesStrategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaijsretNo ratings yet
- Module 5D - DIGSI4 - CFCDocument25 pagesModule 5D - DIGSI4 - CFCWalter Andres Estevez Vasquez0% (1)
- Performance Evaluation of Artificial Neural Networks For Spatial Data AnalysisDocument15 pagesPerformance Evaluation of Artificial Neural Networks For Spatial Data AnalysistalktokammeshNo ratings yet
- Airbus FAST60 PDFDocument40 pagesAirbus FAST60 PDFrenjithaeroNo ratings yet
- Multilayer Perceptron: Fundamentals and Applications for Decoding Neural NetworksFrom EverandMultilayer Perceptron: Fundamentals and Applications for Decoding Neural NetworksNo ratings yet
- A Review On Ash Agglomeration Phenomenon in Fluidised Bed Combustion BoilerDocument9 pagesA Review On Ash Agglomeration Phenomenon in Fluidised Bed Combustion BoilerijsretNo ratings yet
- Institute of Engineering and Technology Davv, Indore: Lab Assingment OnDocument14 pagesInstitute of Engineering and Technology Davv, Indore: Lab Assingment OnNikhil KhatloiyaNo ratings yet
- Parallel Neural Network Training With Opencl: Nenad Krpan, Domagoj Jakobovi CDocument5 pagesParallel Neural Network Training With Opencl: Nenad Krpan, Domagoj Jakobovi CCapitan TorpedoNo ratings yet
- MAC For ANN Using VerilogDocument6 pagesMAC For ANN Using VerilogJayant SinghNo ratings yet
- Back Propagation Algorithm in VerilogDocument4 pagesBack Propagation Algorithm in VerilogMMONo ratings yet
- Neural NetworksDocument12 pagesNeural NetworksdsjcfnpsdufbvpNo ratings yet
- Artificial Neural NetworksDocument4 pagesArtificial Neural NetworksZUHAL MUJADDID SAMASNo ratings yet
- Implementation of A Library For Artificial Neural Networks in CDocument10 pagesImplementation of A Library For Artificial Neural Networks in COscar OlivaresNo ratings yet
- Hardware Implementation of A MLP Network With On-Chip LearningDocument6 pagesHardware Implementation of A MLP Network With On-Chip LearningYuukiaNo ratings yet
- BACK PROPAGATION Cluster 4Document45 pagesBACK PROPAGATION Cluster 4MonikaNo ratings yet
- Pattern Recognition System Using MLP Neural Networks: Sarvda Chauhan, Shalini DhingraDocument4 pagesPattern Recognition System Using MLP Neural Networks: Sarvda Chauhan, Shalini DhingraIJERDNo ratings yet
- Neural Networks in Automated Measurement Systems: State of The Art and New Research TrendsDocument6 pagesNeural Networks in Automated Measurement Systems: State of The Art and New Research TrendsEmin KültürelNo ratings yet
- Patel Collage of Science and Technology Indore (M.P) : Lab IIDocument14 pagesPatel Collage of Science and Technology Indore (M.P) : Lab IIOorvi ThakurNo ratings yet
- Performance Analysis of Handwritten Marathi Character Recognition With RBF, Cascade, Elman and Feed Forward Neural NetworksDocument5 pagesPerformance Analysis of Handwritten Marathi Character Recognition With RBF, Cascade, Elman and Feed Forward Neural NetworksAnonymous lPvvgiQjRNo ratings yet
- Step by Step Procedure That How I Resolve Given Task PytorhDocument6 pagesStep by Step Procedure That How I Resolve Given Task PytorhAbhay Singh TanwarNo ratings yet
- Tarea 5 - Resumen GrupalDocument9 pagesTarea 5 - Resumen GrupalArnold A. Phillips D.No ratings yet
- Classification by Backpropagation - A Multilayer Feed-Forward Neural Network - Defining A Network Topology - BackpropagationDocument8 pagesClassification by Backpropagation - A Multilayer Feed-Forward Neural Network - Defining A Network Topology - BackpropagationKingzlynNo ratings yet
- Unit 4 NotesDocument45 pagesUnit 4 Notesvamsi kiran100% (1)
- Chapter 5 1Document35 pagesChapter 5 1Dewanand GiriNo ratings yet
- Pinjare S.L., Arun Kumar M. - Implementation of Neural Network Back Propagation Training Algorithm On FPGA PDFDocument7 pagesPinjare S.L., Arun Kumar M. - Implementation of Neural Network Back Propagation Training Algorithm On FPGA PDFȘtefan VelixNo ratings yet
- Shibuya Feedback U-Net For Cell Image Segmentation CVPRW 2020 PaperDocument9 pagesShibuya Feedback U-Net For Cell Image Segmentation CVPRW 2020 Paperumerirfan727No ratings yet
- Session 1Document8 pagesSession 1Ramu ThommandruNo ratings yet
- Artificial Neural Network Part-2Document15 pagesArtificial Neural Network Part-2Zahid JavedNo ratings yet
- FlannDocument8 pagesFlannNadeem UddinNo ratings yet
- Exp6 - Artificial Neural NetworksDocument16 pagesExp6 - Artificial Neural NetworksmnbatrawiNo ratings yet
- FPGA Based Artificial Neural NetworkDocument11 pagesFPGA Based Artificial Neural Network29377No ratings yet
- Object Classification Through Perceptron Model Using LabviewDocument4 pagesObject Classification Through Perceptron Model Using LabviewLuis E. Neira RoperoNo ratings yet
- DatMiningAssignmentDocument9 pagesDatMiningAssignmentPARNEET SAININo ratings yet
- Artifical Neural NetworkDocument7 pagesArtifical Neural NetworkAby MathewNo ratings yet
- Fpga Implementation of A Multilayer Perceptron Neural Network Using VHDLDocument4 pagesFpga Implementation of A Multilayer Perceptron Neural Network Using VHDLminoramixNo ratings yet
- Unit - 2Document24 pagesUnit - 2vvvcxzzz3754No ratings yet
- ML Unit-2Document141 pagesML Unit-26644 HaripriyaNo ratings yet
- Neural Networks PaperDocument8 pagesNeural Networks PaperGuvvala VenkataramireddyNo ratings yet
- Hardware Implementation BackpropagationDocument14 pagesHardware Implementation BackpropagationDavidThânNo ratings yet
- CS 601 Machine Learning Unit 4Document14 pagesCS 601 Machine Learning Unit 4Priyanka BhateleNo ratings yet
- Machine Learning: Version 2 CSE IIT, KharagpurDocument5 pagesMachine Learning: Version 2 CSE IIT, KharagpurVanu ShaNo ratings yet
- Behaviour Analysis of Multilayer Perceptronswith MDocument7 pagesBehaviour Analysis of Multilayer Perceptronswith MJosé Geraldo De Souza SilvaNo ratings yet
- ++ar Applications of Rna in Structural Eng ConceptDocument16 pages++ar Applications of Rna in Structural Eng ConceptdefrNo ratings yet
- Back PropagationDocument27 pagesBack PropagationShahbaz Ali Khan100% (1)
- DM Assignment.1Document3 pagesDM Assignment.1Muhammad Asfar SiddiqueNo ratings yet
- Matlab FileDocument16 pagesMatlab FileAvdesh Pratap Singh GautamNo ratings yet
- Vasilic2005Document9 pagesVasilic2005fernando ceballosNo ratings yet
- ANFIS Based Distillation Column Control: R. Sivakumar K. BaluDocument7 pagesANFIS Based Distillation Column Control: R. Sivakumar K. BaluEr Mayur PatilNo ratings yet
- Digital Neural Networks: Tony R. MartinezDocument8 pagesDigital Neural Networks: Tony R. MartinezzaqweasNo ratings yet
- Ann Lab Manual 2Document7 pagesAnn Lab Manual 2Manak JainNo ratings yet
- A Systolic Array Exploiting The Parallelisms of Artificial Neural Inherent NetworksDocument15 pagesA Systolic Array Exploiting The Parallelisms of Artificial Neural Inherent NetworksctorreshhNo ratings yet
- Modeling A Perceptron Neuron Using Verilog Developed Floating Point Numbering System and Modules For Hardware SynthesisDocument14 pagesModeling A Perceptron Neuron Using Verilog Developed Floating Point Numbering System and Modules For Hardware SynthesisNaveen KumarNo ratings yet
- TamanaChauhan-1Document75 pagesTamanaChauhan-1Free FireNo ratings yet
- Article NNOptimizationDocument8 pagesArticle NNOptimizationAmrou AkroutiNo ratings yet
- Power System Planning and Operation Using Artificial Neural NetworksDocument6 pagesPower System Planning and Operation Using Artificial Neural NetworksInternational Journal of computational Engineering research (IJCER)No ratings yet
- Ann FileDocument49 pagesAnn Filerohit148inNo ratings yet
- Mcgarry Tait Werm Ter Macintyre 1999Document6 pagesMcgarry Tait Werm Ter Macintyre 1999ashenafiNo ratings yet
- BCI DeepLearningDocument9 pagesBCI DeepLearningapurv shuklaNo ratings yet
- Implementations of Learning Control Systems Using Neural NetworksDocument9 pagesImplementations of Learning Control Systems Using Neural NetworksS KhatibNo ratings yet
- Feedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsFrom EverandFeedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsNo ratings yet
- Consruction of A Direct Solar Dryer For Perishable Farm ProductsDocument9 pagesConsruction of A Direct Solar Dryer For Perishable Farm ProductsijsretNo ratings yet
- Thermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue EngineeringDocument5 pagesThermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue Engineeringijsret100% (1)
- Mechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesDocument6 pagesMechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesijsretNo ratings yet
- CHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.Document5 pagesCHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.ijsretNo ratings yet
- A Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentDocument5 pagesA Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentijsretNo ratings yet
- A Review On Natural Fibre Polymer CompositesDocument6 pagesA Review On Natural Fibre Polymer CompositesijsretNo ratings yet
- Blending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsDocument11 pagesBlending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsijsretNo ratings yet
- Comparative Study and Review On Object Oriented Design MetricsDocument4 pagesComparative Study and Review On Object Oriented Design MetricsijsretNo ratings yet
- Comparative Study and Review On Object Oriented Design MetricsDocument4 pagesComparative Study and Review On Object Oriented Design MetricsijsretNo ratings yet
- Comparison of Workpiece Geometry and Its Effects On ECAP Process by FEADocument5 pagesComparison of Workpiece Geometry and Its Effects On ECAP Process by FEAijsretNo ratings yet
- A Review On Fingerprint Detection and Recognization TechniquesDocument4 pagesA Review On Fingerprint Detection and Recognization TechniquesijsretNo ratings yet
- Echo Cancellation System in VOIP Using MATLABDocument3 pagesEcho Cancellation System in VOIP Using MATLABijsretNo ratings yet
- Content Based Image Retrieval Using Color FeatureDocument6 pagesContent Based Image Retrieval Using Color FeatureijsretNo ratings yet
- Treatment of Dairy Waste Water Using Low Cost AdsorbentsDocument2 pagesTreatment of Dairy Waste Water Using Low Cost AdsorbentsijsretNo ratings yet
- Energy Production in Public Transport Using Piezoelectric MaterialDocument4 pagesEnergy Production in Public Transport Using Piezoelectric MaterialijsretNo ratings yet
- Application of Modified Euler's Method in Obtaining Numerical Solution of Swing EquationDocument7 pagesApplication of Modified Euler's Method in Obtaining Numerical Solution of Swing Equationijsret100% (1)
- Compact Printed Dipole Antenna With Low Return Loss and VSWRDocument2 pagesCompact Printed Dipole Antenna With Low Return Loss and VSWRijsretNo ratings yet
- Removal of Reactive Dye From Aqueous Solutions Using Orange and Lemon Peel As Bio - AdsorbentDocument8 pagesRemoval of Reactive Dye From Aqueous Solutions Using Orange and Lemon Peel As Bio - AdsorbentijsretNo ratings yet
- E-Readiness Assessment: A Standard To Uplift Digital India ProgramDocument5 pagesE-Readiness Assessment: A Standard To Uplift Digital India ProgramijsretNo ratings yet
- Heat Transfer Behaviors in A Parabolic Trough Solar Collector Tube With Compound TechniqueDocument8 pagesHeat Transfer Behaviors in A Parabolic Trough Solar Collector Tube With Compound TechniqueijsretNo ratings yet
- Delta ModulationDocument44 pagesDelta ModulationJyotirmoy DekaNo ratings yet
- RGMO Frequency Influence SchemeDocument1 pageRGMO Frequency Influence SchemeJitendra SharmaNo ratings yet
- Optimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFDocument49 pagesOptimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFLars GlöcknerNo ratings yet
- 1SDA081063R1 t5n 630 Ekip e Lsig in 630a 3p F FDocument3 pages1SDA081063R1 t5n 630 Ekip e Lsig in 630a 3p F FBolivar MartinezNo ratings yet
- Moscap5mar 2020Document2 pagesMoscap5mar 2020Omkar KatkarNo ratings yet
- SG1524Document9 pagesSG1524Med Habib AitNo ratings yet
- CA2031 CableAccess 600ACrossRefDocument2 pagesCA2031 CableAccess 600ACrossRefLuis GalánNo ratings yet
- Ultimate Winamp Audio GuideDocument30 pagesUltimate Winamp Audio GuideСтефан МршевићNo ratings yet
- Buku ProgramDocument17 pagesBuku ProgramMieza Binti YusoffNo ratings yet
- BVP651 Led530-4s 830 Psu DX10 Alu SRG10 PDFDocument3 pagesBVP651 Led530-4s 830 Psu DX10 Alu SRG10 PDFRiska Putri AmirNo ratings yet
- Detailed Technical Report.Document1 pageDetailed Technical Report.RaziKhanNo ratings yet
- Bare Copper Conductor: Standards / Testing SpecificationsDocument4 pagesBare Copper Conductor: Standards / Testing SpecificationskjkljkljlkjljlkNo ratings yet
- 2015 - Catalog - ABB Cable Accessories 145-170 KV - English - Cable Terminations CD - REV ADocument2 pages2015 - Catalog - ABB Cable Accessories 145-170 KV - English - Cable Terminations CD - REV ARomany AllamNo ratings yet
- Fonte 12v Bivolt TNY278PNDocument37 pagesFonte 12v Bivolt TNY278PNRodolfo Arantes GonçalvesNo ratings yet
- Dielectric SpectrosDocument6 pagesDielectric SpectrosAloke RajkishoreNo ratings yet
- Smart Ticketing: C.ticket RangeDocument2 pagesSmart Ticketing: C.ticket RangejesolorzanoNo ratings yet
- Drude Model: Successes and LimitationsDocument4 pagesDrude Model: Successes and LimitationsNeeraj Mosawa67% (6)
- June15 10EE56 PDFDocument2 pagesJune15 10EE56 PDFrama KrishnaNo ratings yet
- KingtoneDocument2 pagesKingtoneUlla WirtanenNo ratings yet
- Tap ChangerDocument1 pageTap Changerduykhanh1710No ratings yet
- Fa Lambda Zup3612Document56 pagesFa Lambda Zup3612doce12No ratings yet
- Software For Network-Based Video Recording System SISTORE MX NVR (Ver. 2.57)Document5 pagesSoftware For Network-Based Video Recording System SISTORE MX NVR (Ver. 2.57)JosephPitoyNo ratings yet
- Isow7741 q1Document59 pagesIsow7741 q1gwegawNo ratings yet