You might also like
- Lateral Load Analysis of Single PilesDocument12 pagesLateral Load Analysis of Single Pilesraphfm33% (3)
- Tips - For - Designers AISC Design Guide VibrationDocument5 pagesTips - For - Designers AISC Design Guide VibrationRicardo Argentton FicanhaNo ratings yet
- Plaxis Excercise 3Document4 pagesPlaxis Excercise 3raphfmNo ratings yet
- Introduction of LS-DYNADocument17 pagesIntroduction of LS-DYNAYaneng ZhouNo ratings yet
- (Ebook PDF) Programming - Using OpenGL in Visual C++Document18 pages(Ebook PDF) Programming - Using OpenGL in Visual C++TajotajoNo ratings yet
- Dewatering For ConstructionDocument14 pagesDewatering For ConstructionpabulumzengNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hot Runner ControllerDocument13 pagesHot Runner ControllerNguyễn Hùng CườngNo ratings yet
- 18 Sound Product Overview 2011Document2 pages18 Sound Product Overview 2011sasiNo ratings yet
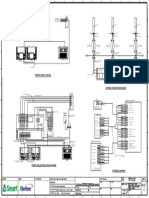
- Rbs/Bts Signal Cabling: DF PanelDocument1 pageRbs/Bts Signal Cabling: DF PanelMayuSalanggaNo ratings yet
- Cellular Neural Networks: Theory: Stability AnalysisDocument16 pagesCellular Neural Networks: Theory: Stability AnalysisMauricio RamosNo ratings yet
- Intel LGA 2011 - Square ILM LGA 2066Document2 pagesIntel LGA 2011 - Square ILM LGA 2066Dejan NNo ratings yet
- Udhog Byapar Patrika Jetha Setting 2075Document15 pagesUdhog Byapar Patrika Jetha Setting 2075Sanjay GyawalyNo ratings yet
- 5g Technology Seminar ReportDocument28 pages5g Technology Seminar Reportankit20750% (1)
- Project AbbreviationsDocument4 pagesProject AbbreviationsLuis SabinoNo ratings yet
- 2006 Eclipse Part ListDocument121 pages2006 Eclipse Part ListFaris Ammar KalthamNo ratings yet
- 2.0L FsiDocument46 pages2.0L Fsismellybum67% (3)
- 1402 Auto Service Technician Level 4Document41 pages1402 Auto Service Technician Level 4Sudheesh SNo ratings yet
- Commissioning Services Department Commissioning Manual Factory Type and Routine TestsDocument19 pagesCommissioning Services Department Commissioning Manual Factory Type and Routine Testsm khNo ratings yet
- IBM Power 570 Replacement ProcedureDocument346 pagesIBM Power 570 Replacement Procedure26cristinaNo ratings yet
- Installation Instructions: Part No. CRTIMEGD001A00Document4 pagesInstallation Instructions: Part No. CRTIMEGD001A00Freddy MartinezNo ratings yet
- Mod Philips Fortimo Led Strip 24in 2200LM 840 929000778013 Set 570ma PDFDocument10 pagesMod Philips Fortimo Led Strip 24in 2200LM 840 929000778013 Set 570ma PDFLuis Lujan ArevaloNo ratings yet
- Arf1500 PDFDocument4 pagesArf1500 PDFbookreader1968No ratings yet
- Activity 3 Robotics 2Document2 pagesActivity 3 Robotics 2Jessa TirambuloNo ratings yet
- An Adaptive Hy Steresis-Band Current Control Technique of A Voltage-Fed PWM Inverter For Machine Drive SystemDocument7 pagesAn Adaptive Hy Steresis-Band Current Control Technique of A Voltage-Fed PWM Inverter For Machine Drive SystemJandfor Tansfg Errott100% (1)
- ANGEN - En006 B Restricted Earth Fault ProtectionDocument5 pagesANGEN - En006 B Restricted Earth Fault ProtectionAlejandro Mira EstradaNo ratings yet
- Manual Amptron Ai205Document3 pagesManual Amptron Ai205OdirNtanNo ratings yet
- GE Fanuc AutomationDocument847 pagesGE Fanuc AutomationNgọc Phê HồNo ratings yet
- TDR & FMCW Radar Level Transmitters Principle Instrumentation ToolsDocument3 pagesTDR & FMCW Radar Level Transmitters Principle Instrumentation Toolskali bangonNo ratings yet
- Opamp Desiging Project ReportDocument6 pagesOpamp Desiging Project ReportTarun PrakashNo ratings yet
- Manual Service Mx5203ms 22Document1 pageManual Service Mx5203ms 22yudiw74No ratings yet
- Onkyo Tx-Sr602-E 8260 SMDocument124 pagesOnkyo Tx-Sr602-E 8260 SMafraniobatista100% (1)
- BRKSPG 2206Document89 pagesBRKSPG 2206abaheabaheNo ratings yet
- Ee101 Basics of Electrical Engineering (End - SP19)Document2 pagesEe101 Basics of Electrical Engineering (End - SP19)soronaj532No ratings yet
- CLARO COMBO Emergency Light With Exit Signs v1.3Document2 pagesCLARO COMBO Emergency Light With Exit Signs v1.3Charlie MendozaNo ratings yet
- 0 26 enDocument130 pages0 26 enHoangNo ratings yet
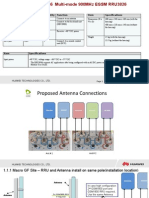
- Product Introduce-RRU InstallationDocument10 pagesProduct Introduce-RRU InstallationMuhammad AhsanNo ratings yet