You might also like
- Free Report: Brought To You by Jestine YongDocument9 pagesFree Report: Brought To You by Jestine YongrajuNo ratings yet
- Optocoupler Solutions Guide PDFDocument24 pagesOptocoupler Solutions Guide PDFBen Salah IssamNo ratings yet
- Design and Implementation of Multiple Output Switch Mode Power SupplyDocument6 pagesDesign and Implementation of Multiple Output Switch Mode Power SupplyseventhsensegroupNo ratings yet
- UC3842 Inside SchematicsDocument17 pagesUC3842 Inside Schematicsp.c100% (1)
- Report On Power SupplyDocument16 pagesReport On Power SupplyKshitij GuptaNo ratings yet
- 12 Volt Smps Circuit DiagramDocument7 pages12 Volt Smps Circuit DiagramAnura MaddumageNo ratings yet
- fsp488-4f01 Power Supply SCHDocument1 pagefsp488-4f01 Power Supply SCHCarlos Junior PereiraNo ratings yet
- 02A Lesson Proper For Week 7Document9 pages02A Lesson Proper For Week 7Maxela CastroNo ratings yet
- Design of A Power Converter Based On UC3842 For Blade Electric VehicleDocument6 pagesDesign of A Power Converter Based On UC3842 For Blade Electric VehicleHossam SobhyNo ratings yet
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDocument16 pagesUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- Switched Mode Power SupplyDocument153 pagesSwitched Mode Power SupplyIvan222244No ratings yet
- Switch Mode Power Supply Topologies Compared - Wurth Electronics MidcomDocument4 pagesSwitch Mode Power Supply Topologies Compared - Wurth Electronics Midcommayank shuklaNo ratings yet
- Articolo SWR EngDocument4 pagesArticolo SWR EngLuis Enrique Castillejo GonzalesNo ratings yet
- AN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesAN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipbmmostefaNo ratings yet
- An Introduction to Switched Mode Power Supply TopologiesDocument21 pagesAn Introduction to Switched Mode Power Supply Topologiesseahate100% (1)
- Review of a simple adjustable power supply using linear and switching componentsDocument4 pagesReview of a simple adjustable power supply using linear and switching componentsramesh ranjitNo ratings yet
- A Power Supply UnitDocument11 pagesA Power Supply UnitShin Jae JiNo ratings yet
- Konka lc4055 - kps220-01Document2 pagesKonka lc4055 - kps220-01Edson DiasNo ratings yet
- Power SupplyDocument9 pagesPower SupplyMuhammed HuzaifaNo ratings yet
- Digital Phase Selector: A Mini-Project Report Submitted in Partial Fulfillment Requirements For The Award ofDocument53 pagesDigital Phase Selector: A Mini-Project Report Submitted in Partial Fulfillment Requirements For The Award ofdondbNo ratings yet
- Regulated Power Supply1Document4 pagesRegulated Power Supply1hamed razaNo ratings yet
- ATX-PC power supplies convert for stable 13.8 voltsDocument16 pagesATX-PC power supplies convert for stable 13.8 voltsMilan MilenkovićNo ratings yet
- PWM Motor Speed Controller and DC Light Dimmer Circuit GuideDocument16 pagesPWM Motor Speed Controller and DC Light Dimmer Circuit GuideRICHIHOTS2100% (2)
- Optocoupler Selection GuideDocument28 pagesOptocoupler Selection GuideAnonymous 0CnvpxSNo ratings yet
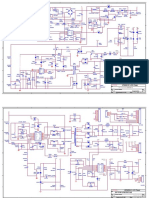
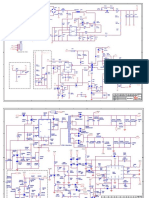
- Bl/On ADJ SEL Bl/On ADJ: KPS+L150C3-01 KPS+L150C3-01 KPS+L150C3-01Document4 pagesBl/On ADJ SEL Bl/On ADJ: KPS+L150C3-01 KPS+L150C3-01 KPS+L150C3-01DACONo ratings yet
- Fonte SEMP LE4050Document4 pagesFonte SEMP LE4050Rafael MarquesNo ratings yet
- A Comparison of Calculated Battery CapacityDocument6 pagesA Comparison of Calculated Battery CapacityankurmalviyaNo ratings yet
- Battery Management System (BMS) For Lithium-Ion BatteriesDocument98 pagesBattery Management System (BMS) For Lithium-Ion BatteriesAndre Coutinho100% (3)
- UPS Battery Selection GuideDocument43 pagesUPS Battery Selection Guideagulechha100% (1)
- Switch Mode Multi Level Power AmplifierDocument56 pagesSwitch Mode Multi Level Power AmplifierLuiz Clemente PimentaNo ratings yet
- 95-Wat Laptop PSU 12V in - 19V 5A Out PDFDocument7 pages95-Wat Laptop PSU 12V in - 19V 5A Out PDFArina ScăunașuNo ratings yet
- Fa Dps 119apDocument2 pagesFa Dps 119appedroNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageFrom EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageNo ratings yet
- Core JavaDocument210 pagesCore JavaDavrice RichardsNo ratings yet
- Delta Dps-245fp Psu SCHDocument1 pageDelta Dps-245fp Psu SCHFreddy RiveraNo ratings yet
- Agastya's Advice: Recite the Aditya Hridaya HymnDocument4 pagesAgastya's Advice: Recite the Aditya Hridaya Hymnmohanv41No ratings yet
- PFC circuit schematic diagramDocument2 pagesPFC circuit schematic diagramies837No ratings yet
- HP 3parDocument8 pagesHP 3parRoel Magistrado100% (1)
- LG 50ps60 Training ManualDocument142 pagesLG 50ps60 Training ManualjesusNo ratings yet
- Aplicacion Uc3842Document15 pagesAplicacion Uc3842Gian Mejia100% (1)
- Tools for LAN CablingDocument23 pagesTools for LAN CablingHonorato MalabadNo ratings yet
- Switch Mode Power Supply Basics TutorialDocument16 pagesSwitch Mode Power Supply Basics TutorialDavidNo ratings yet
- PWMDocument1 pagePWMSharungomesNo ratings yet
- ZVS Full BridgeDocument20 pagesZVS Full Bridgejameschall1No ratings yet
- External Current Limiting CircuitDocument3 pagesExternal Current Limiting CircuitmikcomiNo ratings yet
- SMPS Design Group ProjectDocument22 pagesSMPS Design Group ProjectMuhammad Adnan Khan DurraniNo ratings yet
- Digital Control of Switching Power SupplyDocument11 pagesDigital Control of Switching Power Supplyilluminatissm100% (1)
- Selecting X-Rated Capacitors for Transformerless AC Power SupplyDocument8 pagesSelecting X-Rated Capacitors for Transformerless AC Power SupplyIvez StrausseNo ratings yet
- Electronic OscillatorDocument15 pagesElectronic OscillatorSuresh PharamasivamNo ratings yet
- FB Comp OUT VCC: INPUT: 100-240V AC SpecificationDocument2 pagesFB Comp OUT VCC: INPUT: 100-240V AC SpecificationFernando Guerrero100% (1)
- Delta dps-279bp Ps PDFDocument4 pagesDelta dps-279bp Ps PDFA PiresNo ratings yet
- Switch-Mode Power Supplies - SPICE Simulations and Practical Designs - EE Times3 PDFDocument7 pagesSwitch-Mode Power Supplies - SPICE Simulations and Practical Designs - EE Times3 PDFVIJAYPUTRA0% (1)
- Pure Sine Wave Inverter Project PDFDocument5 pagesPure Sine Wave Inverter Project PDFAnandu EkNo ratings yet
- Bob's Blue2 Ring Tester Checks InductorsDocument4 pagesBob's Blue2 Ring Tester Checks InductorsAsher Duane Clairet AzeleaNo ratings yet
- Switch Mode Power Supply (SMPS) Topologies (Part II)Document108 pagesSwitch Mode Power Supply (SMPS) Topologies (Part II)Willie WalkerNo ratings yet
- Exp 9 Boost ConverterDocument8 pagesExp 9 Boost ConverterusmpowerlabNo ratings yet
- PDP42V5 Service ManualDocument59 pagesPDP42V5 Service ManualEduardo Cordova100% (1)
- 1 3 8 TI Digital Logic FamiliesDocument4 pages1 3 8 TI Digital Logic FamiliesJose Luis Castro AguilarNo ratings yet
- Analysis 3v5v Sony MBX223 M960 ICDocument3 pagesAnalysis 3v5v Sony MBX223 M960 ICmadumadawa rajapakshaNo ratings yet
- HP 3kw Datasheet-1Document3 pagesHP 3kw Datasheet-1pavli999No ratings yet
- Slua 143Document15 pagesSlua 143Tonia KataNo ratings yet
- 2005 - A Three-Level Converter and Its Application To Power Factor CorrectionDocument9 pages2005 - A Three-Level Converter and Its Application To Power Factor CorrectionankurmalviyaNo ratings yet
- Embedded System Design Using 8051 Micro ControllersDocument100 pagesEmbedded System Design Using 8051 Micro ControllersarvindNo ratings yet
- 8051 ManualDocument334 pages8051 Manualapi-3776064100% (1)
- Design of Solar Inverter To Drive Three Phase Induction Motor Ijariie4553Document7 pagesDesign of Solar Inverter To Drive Three Phase Induction Motor Ijariie4553ankurmalviyaNo ratings yet
- Analysis and Evaluation of DC-Link Capacitors for High-Power EV Drive SystemsDocument34 pagesAnalysis and Evaluation of DC-Link Capacitors for High-Power EV Drive SystemsankurmalviyaNo ratings yet
- Embedded System Design Using 8051 Micro ControllersDocument100 pagesEmbedded System Design Using 8051 Micro ControllersarvindNo ratings yet
- Snva 678 BDocument16 pagesSnva 678 Bhamed sedighnezhadNo ratings yet
- TPS54231 2-A, 28-V Input, Step-Down DC-DC Converter With Eco-Mode™Document34 pagesTPS54231 2-A, 28-V Input, Step-Down DC-DC Converter With Eco-Mode™ankurmalviyaNo ratings yet
- Snva 678 BDocument16 pagesSnva 678 Bhamed sedighnezhadNo ratings yet
- Capacitors For High Performance Inverter ApplicationsDocument8 pagesCapacitors For High Performance Inverter ApplicationsShiva Patel DasariNo ratings yet
- Prekidačka NapajanjaDocument48 pagesPrekidačka NapajanjaDamir PranjkovicNo ratings yet
- Z8 Encore! XP®-Based NiMHDocument32 pagesZ8 Encore! XP®-Based NiMHcarlosgnNo ratings yet
- EMI FIlter DesignDocument27 pagesEMI FIlter DesignankurmalviyaNo ratings yet
- LC Filter DesignDocument41 pagesLC Filter DesignPhạm Tuấn AnhNo ratings yet
- Chapter 9Document30 pagesChapter 9chandraiva9820No ratings yet
- Z8 Encore! XP®-Based NiMHDocument32 pagesZ8 Encore! XP®-Based NiMHcarlosgnNo ratings yet
- Relaxation Techniques at WorkplaceDocument68 pagesRelaxation Techniques at WorkplaceankurmalviyaNo ratings yet
- FloodedMaintenance 0411Document2 pagesFloodedMaintenance 0411ankurmalviyaNo ratings yet
- Stress ManagementDocument81 pagesStress ManagementankurmalviyaNo ratings yet
- Schnider MCB CatalogueDocument4 pagesSchnider MCB Catalogueankurmalviya0% (1)
- 01 Rational NumberDocument20 pages01 Rational NumberAnuj MadaanNo ratings yet
- 8 PDFDocument21 pages8 PDFDeepika ParaswaniNo ratings yet
- Angaraka StotramDocument2 pagesAngaraka Stotramapi-19750173No ratings yet
- Explanation of UPS TopologiesDocument2 pagesExplanation of UPS TopologiesankurmalviyaNo ratings yet
- AshtonPaper2004 IEEE Battery StandardDocument5 pagesAshtonPaper2004 IEEE Battery StandardankurmalviyaNo ratings yet
- FloodedMaintenance 0411Document2 pagesFloodedMaintenance 0411ankurmalviyaNo ratings yet
- Automotive Connectors: BAB Connector SISC ConnectorDocument13 pagesAutomotive Connectors: BAB Connector SISC ConnectorPrabhansh PandeyNo ratings yet
- System Software Lab ManualDocument22 pagesSystem Software Lab ManualShantheri BhatNo ratings yet
- ch1 - Basics of Graphics (CGR)Document15 pagesch1 - Basics of Graphics (CGR)Ravindra NawaleNo ratings yet
- VPLEX 4.0 Installation and Setup GuideDocument114 pagesVPLEX 4.0 Installation and Setup GuideSujit FrancisNo ratings yet
- Sce en 020-050 R1209 PlcsimDocument18 pagesSce en 020-050 R1209 PlcsimSeth StephensNo ratings yet
- Introduction To Object Oriented Database: Unit-IDocument67 pagesIntroduction To Object Oriented Database: Unit-Ipreetham rNo ratings yet
- Unit-1 DC CircuitsDocument44 pagesUnit-1 DC CircuitsLatha BarlaNo ratings yet
- EventDocument1,256 pagesEventmilmat1966No ratings yet
- Equinox II11 ADocument5 pagesEquinox II11 AMaulana AdiNo ratings yet
- Cubase and Your KeylabDocument8 pagesCubase and Your Keylabfaco1615No ratings yet
- RasPi 05Document64 pagesRasPi 05Karol SkowronskiNo ratings yet
- Emar Capstone123Document14 pagesEmar Capstone123Emar Vince OliverosNo ratings yet
- Isuzu Clearing DTC ProcedureDocument2 pagesIsuzu Clearing DTC ProcedureRodrigo Almanza NNo ratings yet
- GPS Receiver Components and TypesDocument12 pagesGPS Receiver Components and TypesSuresh PallemkotaNo ratings yet
- Simon's Model & Components of SDSSDocument10 pagesSimon's Model & Components of SDSSpradiprasve87No ratings yet
- Delcon Blood Monitoring ShakerDocument4 pagesDelcon Blood Monitoring ShakerMohammed ShabanNo ratings yet
- Configuring and Managing Store-And-Forward For OracleDocument38 pagesConfiguring and Managing Store-And-Forward For Oraclepriya_z3zNo ratings yet
- Technical SpecificationDocument46 pagesTechnical SpecificationArjun KumarNo ratings yet
- Voltage RangeDocument2 pagesVoltage RangeApurve PatilNo ratings yet
- Quick Start: Renesas Starter Kit For M16C/29Document4 pagesQuick Start: Renesas Starter Kit For M16C/29potoculNo ratings yet
- Easy OSD v2 Manual PDFDocument2 pagesEasy OSD v2 Manual PDFNestor MansipeNo ratings yet
- IEC 60870-5-104 Master Driver: © 2019 PTC Inc. All Rights ReservedDocument50 pagesIEC 60870-5-104 Master Driver: © 2019 PTC Inc. All Rights ReservedDave YsNo ratings yet
- How To Install Tomato Firmware On NETGEAR WNR3500Lv2 MyOpenRouter December 16, 2012 at 0858PM PDFDocument8 pagesHow To Install Tomato Firmware On NETGEAR WNR3500Lv2 MyOpenRouter December 16, 2012 at 0858PM PDFJoseph Yølk ChiocchiNo ratings yet
- Digitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - LincolnDocument169 pagesDigitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - LincolnDavut Can AkbaşNo ratings yet
- DAQ Systems & Signal Conditioning QuestionsDocument2 pagesDAQ Systems & Signal Conditioning QuestionsYashikaNo ratings yet
- Lenovo IdeaPad Z500 (Disassembly)Document6 pagesLenovo IdeaPad Z500 (Disassembly)Andrew VNo ratings yet
- Sfcfs Admin 70 SolDocument1,169 pagesSfcfs Admin 70 Solvishvendra1No ratings yet