You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Legal DraftingDocument28 pagesLegal Draftingwadzievj100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The 360 Degree Leader J MaxwellDocument2 pagesThe 360 Degree Leader J MaxwellUzen50% (2)
- Design and Implementation of Multiple Output Switch Mode Power SupplyDocument6 pagesDesign and Implementation of Multiple Output Switch Mode Power SupplyseventhsensegroupNo ratings yet
- Synergy Elektrik (PVT.) LTD PDFDocument3 pagesSynergy Elektrik (PVT.) LTD PDFMuhammad KashifNo ratings yet
- CPWA Code MCQDocument43 pagesCPWA Code MCQSamrat Mukherjee100% (3)
- Appointment - Letter GaganDocument10 pagesAppointment - Letter GaganAjay choudharyNo ratings yet
- Problemas Del Capitulo 7Document26 pagesProblemas Del Capitulo 7dic vilNo ratings yet
- C28x WorkshopDocument400 pagesC28x WorkshopMarcio De Andrade VogtNo ratings yet
- Non-Linear Static Analysis of Multi-Storied BuildingDocument5 pagesNon-Linear Static Analysis of Multi-Storied Buildingseventhsensegroup100% (1)
- imageRUNNER+ADVANCE+C5051-5045-5035-5030 Parts CatalogDocument268 pagesimageRUNNER+ADVANCE+C5051-5045-5035-5030 Parts CatalogDragos Burlacu100% (1)
- 1.SITXWHS003 Student Assessment Tasks 1Document58 pages1.SITXWHS003 Student Assessment Tasks 1Yashaswi GhimireNo ratings yet
- Design, Development and Performance Evaluation of Solar Dryer With Mirror Booster For Red Chilli (Capsicum Annum)Document7 pagesDesign, Development and Performance Evaluation of Solar Dryer With Mirror Booster For Red Chilli (Capsicum Annum)seventhsensegroupNo ratings yet
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDocument6 pagesImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupNo ratings yet
- Fabrication of High Speed Indication and Automatic Pneumatic Braking SystemDocument7 pagesFabrication of High Speed Indication and Automatic Pneumatic Braking Systemseventhsensegroup0% (1)
- Ijett V5N1P103Document4 pagesIjett V5N1P103Yosy NanaNo ratings yet
- FPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorDocument4 pagesFPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorseventhsensegroupNo ratings yet
- An Efficient and Empirical Model of Distributed ClusteringDocument5 pagesAn Efficient and Empirical Model of Distributed ClusteringseventhsensegroupNo ratings yet
- Ijett V4i10p158Document6 pagesIjett V4i10p158pradeepjoshi007No ratings yet
- Experimental Analysis of Tobacco Seed Oil Blends With Diesel in Single Cylinder Ci-EngineDocument5 pagesExperimental Analysis of Tobacco Seed Oil Blends With Diesel in Single Cylinder Ci-EngineseventhsensegroupNo ratings yet
- Analysis of The Fixed Window Functions in The Fractional Fourier DomainDocument7 pagesAnalysis of The Fixed Window Functions in The Fractional Fourier DomainseventhsensegroupNo ratings yet
- New CVLRDocument2 pagesNew CVLRanahata2014No ratings yet
- Tales of Mystery Imagination and Humour Edgar Allan Poe PDFDocument289 pagesTales of Mystery Imagination and Humour Edgar Allan Poe PDFmatildameisterNo ratings yet
- Logcat 1676535419488Document174 pagesLogcat 1676535419488Mungkin SayaNo ratings yet
- Manual TP5000Document206 pagesManual TP5000u177427100% (4)
- Abhijit Auditorium Elective Sem 09Document3 pagesAbhijit Auditorium Elective Sem 09Abhijit Kumar AroraNo ratings yet
- UNV EZAccess Datasheet - V1.2-EN - 883121 - 168459 - 0Document3 pagesUNV EZAccess Datasheet - V1.2-EN - 883121 - 168459 - 0Agus NetNo ratings yet
- Geography Cba PowerpointDocument10 pagesGeography Cba Powerpointapi-489088076No ratings yet
- WFP Situation Report On Fire in The Rohingya Refugee Camp (23.03.2021)Document2 pagesWFP Situation Report On Fire in The Rohingya Refugee Camp (23.03.2021)Wahyu RamdhanNo ratings yet
- Marketing Theory and PracticesDocument4 pagesMarketing Theory and PracticesSarthak RastogiNo ratings yet
- Life Lessons AssignmentDocument5 pagesLife Lessons Assignmentapi-332560669No ratings yet
- Bank Reconciliation and Proof of CashDocument2 pagesBank Reconciliation and Proof of CashDarwyn HonaNo ratings yet
- Case Study On DominoDocument7 pagesCase Study On Dominodisha_pandey_4No ratings yet
- I. Characteristics of WastewaterDocument59 pagesI. Characteristics of WastewaterEljay VinsonNo ratings yet
- C# Program To Print Even NumbersDocument11 pagesC# Program To Print Even NumbersNadikattu RavikishoreNo ratings yet
- Radioss For Linear Dynamics 10.0Document79 pagesRadioss For Linear Dynamics 10.0Venkat AnumulaNo ratings yet
- Buyer Persona TemplateDocument18 pagesBuyer Persona TemplateH ANo ratings yet
- Transport For London Pay To Drive in London: PO Box 344 Darlington Dl1 9qe TFL - Gov.uk/drivingDocument1 pageTransport For London Pay To Drive in London: PO Box 344 Darlington Dl1 9qe TFL - Gov.uk/drivingDanyy MaciucNo ratings yet
- E Sevai RegistrationDocument18 pagesE Sevai RegistrationSatheesh PNo ratings yet
- Tire Size ComparisonDocument1 pageTire Size ComparisonBudi DarmawanNo ratings yet
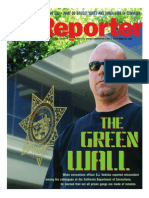
- The Green Wall - Story and Photos by Stephen James Independent Investigative Journalism & Photography - VC Reporter - Ventura County Weekly - California Department of Corrections whistleblower D.J. Vodicka and his litigation against the CDC.Document8 pagesThe Green Wall - Story and Photos by Stephen James Independent Investigative Journalism & Photography - VC Reporter - Ventura County Weekly - California Department of Corrections whistleblower D.J. Vodicka and his litigation against the CDC.Stephen James - Independent Investigative Journalism & PhotographyNo ratings yet
- Misca 367 of 2008Document5 pagesMisca 367 of 2008Kabelo TsehareNo ratings yet