You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Manual For EOT CranesDocument39 pagesManual For EOT CranesManish Jha67% (12)
- ADR131 AmDocument53 pagesADR131 Amapi-3728789100% (2)
- Protective RelaysDocument51 pagesProtective RelaysAkash SinghNo ratings yet
- Vbuilder Manual PDFDocument303 pagesVbuilder Manual PDFantoniocastaedaNo ratings yet
- Electrical SwitchgearsDocument63 pagesElectrical Switchgearsmuaz_aminu142292% (12)
- Introduction To Power System ProtectionDocument52 pagesIntroduction To Power System ProtectionHuzaifa WasimNo ratings yet
- Radial Feeder ProtectionDocument26 pagesRadial Feeder ProtectionLeo GaghanNo ratings yet
- English Mains 2000Document6 pagesEnglish Mains 2000Prasad TlnsNo ratings yet
- Civils Prilims 2000 PaperDocument16 pagesCivils Prilims 2000 PaperPrasad TlnsNo ratings yet
- Enlish Mains 1998Document12 pagesEnlish Mains 1998Prasad TlnsNo ratings yet
- English Mains 1997Document11 pagesEnglish Mains 1997Prasad TlnsNo ratings yet
- Ias Exam PatternDocument2 pagesIas Exam PatternPrasad TlnsNo ratings yet
- English Civils Paper 2002Document3 pagesEnglish Civils Paper 2002Prasad TlnsNo ratings yet
- Preliminary Examinations: 2. Main ExaminationDocument3 pagesPreliminary Examinations: 2. Main ExaminationSagar B LukhiNo ratings yet
- Gs Test 1 Indian Polity Constituion Current Affairs 2010 Vision Ias Module I II III IV VDocument4 pagesGs Test 1 Indian Polity Constituion Current Affairs 2010 Vision Ias Module I II III IV VPrasad TlnsNo ratings yet
- Syluubus All Subjects For IasDocument2 pagesSyluubus All Subjects For IasPrasad TlnsNo ratings yet
- Syllubus of Ias For Electrical Enginnering PrelimsDocument5 pagesSyllubus of Ias For Electrical Enginnering PrelimsPrasad TlnsNo ratings yet
- Civil Services Main Examination Timetable 2009Document1 pageCivil Services Main Examination Timetable 2009Prasad TlnsNo ratings yet
- An Introduction To Computer - 2Document48 pagesAn Introduction To Computer - 2Prasad TlnsNo ratings yet
- IES MarksDocument4 pagesIES MarksSupersittu SittuNo ratings yet
- 4.wave GuideDocument54 pages4.wave GuidePrasad TlnsNo ratings yet
- Fuse Box Diagram Mercedes-Benz C-Class (W203 2000-2007) MiniDocument6 pagesFuse Box Diagram Mercedes-Benz C-Class (W203 2000-2007) Minimitoloj410No ratings yet
- Wired Start Circuit Test Points (11-2010)Document2 pagesWired Start Circuit Test Points (11-2010)agvassNo ratings yet
- WECON LX3V ModulesDocument8 pagesWECON LX3V ModulesJorriqueNo ratings yet
- 3gts250 Workshop Manual-3Document109 pages3gts250 Workshop Manual-3Fernando MattinaNo ratings yet
- 1SFA898112R7000 pstx210 600 70 SoftstarterDocument4 pages1SFA898112R7000 pstx210 600 70 SoftstarterRaul EirisNo ratings yet
- 4.5" Dial Temperature Swichgage SPL and 45TE SeriesDocument4 pages4.5" Dial Temperature Swichgage SPL and 45TE SeriesAlejandroMuñozNo ratings yet
- Siprotec: Communication Module DNP 3.0 Bus Mapping / Point ListsDocument36 pagesSiprotec: Communication Module DNP 3.0 Bus Mapping / Point ListsChomsaniNo ratings yet
- Aux Boiler Dosing Pump (New)Document112 pagesAux Boiler Dosing Pump (New)Panait TibiNo ratings yet
- GAM900/GAM900S: Acceleration Precisely Measured and Safely MonitoredDocument8 pagesGAM900/GAM900S: Acceleration Precisely Measured and Safely MonitoredrrNo ratings yet
- Report On Industrial TrainingDocument60 pagesReport On Industrial TrainingAnish Sarkar100% (1)
- 7SR11 and 7SR12 Argus Catalogue SheetDocument24 pages7SR11 and 7SR12 Argus Catalogue SheetIsai Soledad CervantesNo ratings yet
- Mechanical Relay-Type PDFDocument17 pagesMechanical Relay-Type PDFSaleCvetkovicNo ratings yet
- Self Powered Relay-CGI14SEnglishDocument16 pagesSelf Powered Relay-CGI14SEnglishjoydip.dgp2152100% (2)
- Wizard 900/900E Digital Readout Operations ManualDocument198 pagesWizard 900/900E Digital Readout Operations ManualnorbertNo ratings yet
- Sensor Based Energy Conservation System For Corporate Computers and Lighting SystemDocument43 pagesSensor Based Energy Conservation System For Corporate Computers and Lighting SystemSaravanan ViswakarmaNo ratings yet
- Arrancadores Con EnvolventeDocument16 pagesArrancadores Con Envolventediego martinezNo ratings yet
- 1TLS gd2Document6 pages1TLS gd2Constantin MoldoNo ratings yet
- Chapter 1 - Ladder Diagram FundamentalsDocument5 pagesChapter 1 - Ladder Diagram FundamentalsRitesh SharmaNo ratings yet
- C-9 Heui System Power SuppliesDocument14 pagesC-9 Heui System Power SuppliesJean-Jacques OuandaogoNo ratings yet
- Schneider MiCOM P442 E0 Line User Manual ENUDocument6 pagesSchneider MiCOM P442 E0 Line User Manual ENURaúlEmirGutiérrezLópezNo ratings yet
- Lock - Out Relay PDFDocument4 pagesLock - Out Relay PDFFatholla SalehiNo ratings yet
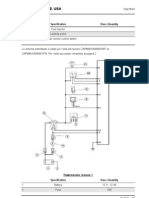
- GE Fuji Drives USA: Adjustable Frequency DriveDocument2 pagesGE Fuji Drives USA: Adjustable Frequency DriveJosé Luis Torres GNo ratings yet
- Delta Wiring GuidelinesDocument62 pagesDelta Wiring GuidelinesLeonardo MartinsNo ratings yet