You might also like
- Particle Swarm OptimizationDocument17 pagesParticle Swarm OptimizationMitul Kumar AhirwalNo ratings yet
- Comparison of Genetic Algorithm and Particle Swarm OptimizationDocument6 pagesComparison of Genetic Algorithm and Particle Swarm OptimizationMikemekanicsNo ratings yet
- Particle Swarm OptimizationDocument12 pagesParticle Swarm Optimizationjoseph676No ratings yet
- A Particle Swarm Optimization Algorithm For Mixed Variable Nonlinear ProblemsDocument14 pagesA Particle Swarm Optimization Algorithm For Mixed Variable Nonlinear ProblemsAhmed WestministerNo ratings yet
- A Hybrid Particle Swarm Evolutionary Algorithm For Constrained Multi-Objective Optimization Jingxuan WeiDocument18 pagesA Hybrid Particle Swarm Evolutionary Algorithm For Constrained Multi-Objective Optimization Jingxuan WeithavaselvanNo ratings yet
- A Cellular Genetic Algorithm For Multiobjective OptimizationDocument12 pagesA Cellular Genetic Algorithm For Multiobjective Optimizationrogeriocosta37No ratings yet
- A Clustering Particle Swarm Optimizer For Locating and Tracking Multiple Optima in Dynamic EnvironmentsDocument16 pagesA Clustering Particle Swarm Optimizer For Locating and Tracking Multiple Optima in Dynamic EnvironmentskarteekakNo ratings yet
- Particle Swarm Optimization - WikipediaDocument9 pagesParticle Swarm Optimization - WikipediaRicardo VillalongaNo ratings yet
- TLSAPSODocument22 pagesTLSAPSOAndy SyaputraNo ratings yet
- A Grasp Algorithm To Solve The Unicost Set Covering Problem: Joaquín Bautista, Jordi PereiraDocument8 pagesA Grasp Algorithm To Solve The Unicost Set Covering Problem: Joaquín Bautista, Jordi PereiraPamela HendricksNo ratings yet
- Association Rule Mining Using Self Adaptive Particle Swarm OptimizationDocument5 pagesAssociation Rule Mining Using Self Adaptive Particle Swarm OptimizationAnonymous TxPyX8cNo ratings yet
- Hybrid Ant Colony-Genetic Algorithm (GAAPI) For Global Continuous OptimizationDocument12 pagesHybrid Ant Colony-Genetic Algorithm (GAAPI) For Global Continuous OptimizationRaghul RamasamyNo ratings yet
- Recent Adv in PSODocument8 pagesRecent Adv in PSONaren PathakNo ratings yet
- PCX - Report (Pso Latest)Document14 pagesPCX - Report (Pso Latest)adil khanNo ratings yet
- Multi-Objective Particle Swarm Optimisation Methods.: Jonathan E. FieldsendDocument20 pagesMulti-Objective Particle Swarm Optimisation Methods.: Jonathan E. Fieldsenddebasishmee5808No ratings yet
- Javid Rad 2017Document82 pagesJavid Rad 2017Chakib BenmhamedNo ratings yet
- Tracking Changing Extrema With Adaptive Particle Swarm OptimizerDocument5 pagesTracking Changing Extrema With Adaptive Particle Swarm OptimizerNaren PathakNo ratings yet
- Particle Swarm Optimization Based Algorithm For Economic Load DispatchDocument6 pagesParticle Swarm Optimization Based Algorithm For Economic Load Dispatchdebasishmee5808No ratings yet
- I JSC 040201Document15 pagesI JSC 040201ijscNo ratings yet
- Optimizing The Sensor Deployment Strategy For Large-Scale Internet of Things (IoT) Using Artificial Bee ColonyDocument6 pagesOptimizing The Sensor Deployment Strategy For Large-Scale Internet of Things (IoT) Using Artificial Bee ColonyHemanth S.NNo ratings yet
- Design Optimization by Using Particle Swarm Optimization in Matlab and Apdl in AnsysDocument10 pagesDesign Optimization by Using Particle Swarm Optimization in Matlab and Apdl in AnsysBakkiya RajNo ratings yet
- A Dynamic Global and Local Combined Particle Swarm Optimization AlgorithmDocument8 pagesA Dynamic Global and Local Combined Particle Swarm Optimization AlgorithmSopan Ram TambekarNo ratings yet
- Dynamic Multi-Objective Optimisation Using PSODocument19 pagesDynamic Multi-Objective Optimisation Using PSOIbtissem Bencheikh El HocineNo ratings yet
- Association Rule Mining by Dynamic Neighborhood Selection in Particle Swarm OptimizationDocument7 pagesAssociation Rule Mining by Dynamic Neighborhood Selection in Particle Swarm OptimizationAnonymous TxPyX8cNo ratings yet
- Workflow Scheduling in Cloud Computing Environment by Combining Particle Swarm Optimization and Grey Wolf OptimizationDocument10 pagesWorkflow Scheduling in Cloud Computing Environment by Combining Particle Swarm Optimization and Grey Wolf OptimizationAnonymous Gl4IRRjzNNo ratings yet
- Framework For Particle Swarm Optimization With Surrogate FunctionsDocument11 pagesFramework For Particle Swarm Optimization With Surrogate FunctionsLucas GallindoNo ratings yet
- Algoritmi GeneticiDocument7 pagesAlgoritmi GeneticiȘtefan CristeaNo ratings yet
- Multi-Objective Optimization With PSO: 1 Problem StatementDocument2 pagesMulti-Objective Optimization With PSO: 1 Problem StatementmaheshboobalanNo ratings yet
- Differential Evolution Using A Neighborhood-Based Mutation OperatorDocument42 pagesDifferential Evolution Using A Neighborhood-Based Mutation OperatorYogesh SharmaNo ratings yet
- Effects of Random Values For Particle Swarm Optimization Algorithm (Iteration)Document20 pagesEffects of Random Values For Particle Swarm Optimization Algorithm (Iteration)Muhammad ShafiqNo ratings yet
- Particle Swarm Optimization: Technique, System and ChallengesDocument9 pagesParticle Swarm Optimization: Technique, System and ChallengesMary MorseNo ratings yet
- Research Article: An Improved Method of Particle Swarm Optimization For Path Planning of Mobile RobotDocument12 pagesResearch Article: An Improved Method of Particle Swarm Optimization For Path Planning of Mobile Robotmarcio pivelloNo ratings yet
- A Hybrid Algorithm Based On Cuckoo Search and Differential Evolution For Numerical OptimizationDocument8 pagesA Hybrid Algorithm Based On Cuckoo Search and Differential Evolution For Numerical OptimizationrasminojNo ratings yet
- Mean Gbest and Gravitational Search AlgorithmDocument22 pagesMean Gbest and Gravitational Search AlgorithmmaniNo ratings yet
- Metaheuristics and Chaos TheoryDocument16 pagesMetaheuristics and Chaos TheoryAbid HasanNo ratings yet
- A New Hybrid PSOGSA Algorithm For Function OptimizationDocument4 pagesA New Hybrid PSOGSA Algorithm For Function OptimizationgantayatNo ratings yet
- Performance Evaluation of Dynamic Particle SwarPerformance Swarm OptimizationDocument5 pagesPerformance Evaluation of Dynamic Particle SwarPerformance Swarm OptimizationijcsnNo ratings yet
- Pso LitDocument7 pagesPso Litadil khanNo ratings yet
- Symmetry: An Improved Butterfly Optimization Algorithm For Engineering Design Problems Using The Cross-Entropy MethodDocument20 pagesSymmetry: An Improved Butterfly Optimization Algorithm For Engineering Design Problems Using The Cross-Entropy Methodomaima ghNo ratings yet
- Efficient Population Utilization Strategy For Particle Swarm OptimizerDocument13 pagesEfficient Population Utilization Strategy For Particle Swarm OptimizerTg WallasNo ratings yet
- 10 1016@j Engappai 2020 103771Document19 pages10 1016@j Engappai 2020 103771Chakib BenmhamedNo ratings yet
- PSO Literature ReviewDocument10 pagesPSO Literature Reviewadil khanNo ratings yet
- An Adaptive Particle Swarm Optimization Algorithm Based On Cat MapDocument8 pagesAn Adaptive Particle Swarm Optimization Algorithm Based On Cat MapmenguemengueNo ratings yet
- SBRN2002Document7 pagesSBRN2002Carlos RibeiroNo ratings yet
- 00r020bk1121qr PDFDocument11 pages00r020bk1121qr PDFIsaias BonillaNo ratings yet
- A Modified Genetic Algorithm For Resource ConstraiDocument5 pagesA Modified Genetic Algorithm For Resource ConstraiObemfalNo ratings yet
- Optimal Scheduling of Generation Using ANFIS: T Sobhanbabu, DR T.Gowri Manohar, P.Dinakar Prasad ReddyDocument5 pagesOptimal Scheduling of Generation Using ANFIS: T Sobhanbabu, DR T.Gowri Manohar, P.Dinakar Prasad ReddyMir JamalNo ratings yet
- My PSODocument14 pagesMy PSOjensi_ramakrishnanNo ratings yet
- Ant Colony Optimization For Continuous Domains: Krzysztof Socha, Marco DorigoDocument19 pagesAnt Colony Optimization For Continuous Domains: Krzysztof Socha, Marco DorigoJessica JaraNo ratings yet
- Genetic Algorithms: 4.1 Quick OverviewDocument12 pagesGenetic Algorithms: 4.1 Quick Overviewseunnuga93No ratings yet
- Improved Particle Swarm Optimization Combined With Chaos: Bo Liu, Ling Wang, Yi-Hui Jin, Fang Tang, De-Xian HuangDocument11 pagesImproved Particle Swarm Optimization Combined With Chaos: Bo Liu, Ling Wang, Yi-Hui Jin, Fang Tang, De-Xian HuangmenguemengueNo ratings yet
- Flexible Job-Shop Scheduling With TRIBES-PSO ApproachDocument9 pagesFlexible Job-Shop Scheduling With TRIBES-PSO ApproachJournal of ComputingNo ratings yet
- Multi-Directional Bat Algorithm For Solving Unconstrained Optimization ProblemsDocument22 pagesMulti-Directional Bat Algorithm For Solving Unconstrained Optimization ProblemsDebapriya MitraNo ratings yet
- Toc28341362083400 PDFDocument63 pagesToc28341362083400 PDFGica SelyNo ratings yet
- ShimuraDocument18 pagesShimuraDamodharan ChandranNo ratings yet
- Genetic Algorithms and Their Applications-AsifDocument11 pagesGenetic Algorithms and Their Applications-Asifarshiya65No ratings yet
- 01 Design of A Fuzzy Controller in Mobile Robotics Using Genetic AlgorithmsDocument7 pages01 Design of A Fuzzy Controller in Mobile Robotics Using Genetic Algorithmscacr_72No ratings yet
- RID 1 ModrobDocument4 pagesRID 1 ModrobbalakaleesNo ratings yet
- nRF24L01P Product Specification 1 0Document78 pagesnRF24L01P Product Specification 1 0CaelumBlimpNo ratings yet
- Bhimbra-Generalized Theory Electrical MachinesDocument10 pagesBhimbra-Generalized Theory Electrical Machinesdebasishmee5808No ratings yet
- RID 1 ModrobDocument6 pagesRID 1 Modrobdebasishmee5808No ratings yet
- TrademarksDocument1 pageTrademarksDhyan SwaroopNo ratings yet
- Adjunct 2Document5 pagesAdjunct 2debasishmee5808No ratings yet
- Extramural Funding2012-13Document2 pagesExtramural Funding2012-13debasishmee5808No ratings yet
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808No ratings yet
- Lec 1Document18 pagesLec 1cavanzasNo ratings yet
- Adaptive Control of Linearizable Systems: Fully-StateDocument9 pagesAdaptive Control of Linearizable Systems: Fully-Statedebasishmee5808No ratings yet
- Control SystemDocument22 pagesControl SystemKamran RazaNo ratings yet
- Electromagnetic Field TheoryDocument3 pagesElectromagnetic Field Theorydebasishmee5808No ratings yet
- 10 1109@91 481843Document12 pages10 1109@91 481843debasishmee5808No ratings yet
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808No ratings yet
- Sophus 3Document1 pageSophus 3debasishmee5808No ratings yet
- Book ListDocument6 pagesBook Listdebasishmee58080% (1)
- T Year B.tech Sylla1sbus Revised 18.08.10Document33 pagesT Year B.tech Sylla1sbus Revised 18.08.10Manoj KarmakarNo ratings yet
- Duplicate Doc Diploma CertiDocument1 pageDuplicate Doc Diploma Certidebasishmee5808No ratings yet
- Best Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New DelhiDocument24 pagesBest Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New Delhidebasishmee5808No ratings yet
- Lec 2Document25 pagesLec 2debasishmee5808No ratings yet
- Control System - I: Weekly Lesson PlanDocument5 pagesControl System - I: Weekly Lesson Plandebasishmee5808No ratings yet
- Introduction To Nba 16 NovDocument32 pagesIntroduction To Nba 16 Novdebasishmee5808No ratings yet
- Time ManagementDocument19 pagesTime ManagementShyam_Nair_9667No ratings yet
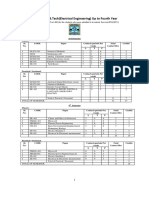
- Syllabus For B.Tech (Electrical Engineering) Up To Fourth YearDocument67 pagesSyllabus For B.Tech (Electrical Engineering) Up To Fourth YearDr. Kaushik MandalNo ratings yet
- Lec 2Document25 pagesLec 2debasishmee5808No ratings yet
- 2 14 24Document11 pages2 14 24debasishmee5808No ratings yet
- Lec 1Document18 pagesLec 1cavanzasNo ratings yet
- Graphical AbstractDocument2 pagesGraphical Abstractdebasishmee5808No ratings yet
- Comparison Between Integer Order and Fractional Order ControllersDocument6 pagesComparison Between Integer Order and Fractional Order Controllersdebasishmee5808No ratings yet
- 05-Algorithms and Problem SolvingDocument61 pages05-Algorithms and Problem SolvingDivaAuliaNo ratings yet
- Crash 2023 04 17 - 20.54.35 FMLDocument4 pagesCrash 2023 04 17 - 20.54.35 FMLDaniel SilvaNo ratings yet
- UntitledDocument772 pagesUntitledAndrew WangNo ratings yet
- Linux Command ListDocument8 pagesLinux Command ListhkneptuneNo ratings yet
- ID AutomationDocument28 pagesID Automationsymphonic82No ratings yet
- Lambda ExpressionsDocument25 pagesLambda ExpressionsTushar LalNo ratings yet
- ETN004 SOCKET TcpSendDocument3 pagesETN004 SOCKET TcpSendahlimNo ratings yet
- TCL 1 2015.00 LGDocument37 pagesTCL 1 2015.00 LGSandeepNo ratings yet
- Case StudyDocument3 pagesCase StudySthefen Nicole TomNo ratings yet
- DP 4 ReportDocument46 pagesDP 4 Reportsabira mullaNo ratings yet
- Cube It: Creating A 3D Rubik'S Cube Simulator in C++ and OpenglDocument1 pageCube It: Creating A 3D Rubik'S Cube Simulator in C++ and OpenglJ. P.No ratings yet
- User'S Manual: LCD 5 Line Digital OperatorDocument28 pagesUser'S Manual: LCD 5 Line Digital Operatorحماد النشاشNo ratings yet
- City, Grade, Salesman - Id) ORDERS (Ord - No, Purchase - Amt, Ord - Date, Customer - Id, Salesman - Id) Write SQL Queries ToDocument4 pagesCity, Grade, Salesman - Id) ORDERS (Ord - No, Purchase - Amt, Ord - Date, Customer - Id, Salesman - Id) Write SQL Queries ToVIDYA P0% (1)
- Final Exam Name: - Score: - Write The Letter of Your Chosen Answer On The Answer SheetDocument18 pagesFinal Exam Name: - Score: - Write The Letter of Your Chosen Answer On The Answer SheetJackie Masloff ConnorsNo ratings yet
- Java 11 Web Applications and Java EeDocument212 pagesJava 11 Web Applications and Java EeIstván KissNo ratings yet
- Ravi Kiran - Dasari: Door No: 6-102, Reddy Street, Akividu, West Godavari, Andhra Pradesh.Document3 pagesRavi Kiran - Dasari: Door No: 6-102, Reddy Street, Akividu, West Godavari, Andhra Pradesh.ravikiran465No ratings yet
- 2019 Summer Model Answer Paper (Msbte Study Resources)Document27 pages2019 Summer Model Answer Paper (Msbte Study Resources)Aditya BorleNo ratings yet
- 100 C Interview Questions and Answers - C Online TestDocument8 pages100 C Interview Questions and Answers - C Online TestEr Nayan PithadiyaNo ratings yet
- 02 - Basic of Apache ANTDocument18 pages02 - Basic of Apache ANTamitfegade121No ratings yet
- Pascal MT+ Language Manual Feb83Document154 pagesPascal MT+ Language Manual Feb83gottes villainNo ratings yet
- Dot Net Interview Questions and Answers PDFDocument16 pagesDot Net Interview Questions and Answers PDFSavitaDarekarNo ratings yet
- NVENC VideoEncoder API ProgGuide.9.0Document42 pagesNVENC VideoEncoder API ProgGuide.9.0iscrbdi100% (2)
- Assignment 6Document11 pagesAssignment 6Ritesh KolateNo ratings yet
- PL1 Condition CodesDocument10 pagesPL1 Condition CodesSatyabrata DashNo ratings yet
- SWE2005 Concepts of Object-Oriented Programming ELA FALL 2021-2022 Semester Lab Sessions - 10 Name: G.V.N.C.PRADYUMNA Reg No: 20MIS7088Document10 pagesSWE2005 Concepts of Object-Oriented Programming ELA FALL 2021-2022 Semester Lab Sessions - 10 Name: G.V.N.C.PRADYUMNA Reg No: 20MIS7088Pradhyumna GundaNo ratings yet
- C# Special CharactersDocument7 pagesC# Special CharactersDivine SolutionsNo ratings yet
- Intro Realtime Chapter1Document77 pagesIntro Realtime Chapter1gurudatt_kulkarniNo ratings yet
- Batery Gauge InitializationDocument4 pagesBatery Gauge InitializationLuis Felipe Colque MirandaNo ratings yet
- Python Microprojec 22616Document13 pagesPython Microprojec 22616nakshtra ahireNo ratings yet
- ADB Chapter 3Document54 pagesADB Chapter 3anwarsirajfeyeraNo ratings yet