You might also like
- Modelado unidimensional de los motores de dos tiempos de pequeña cilindradaFrom EverandModelado unidimensional de los motores de dos tiempos de pequeña cilindradaRating: 5 out of 5 stars5/5 (1)
- Instructivo Motor Induccion PDFDocument9 pagesInstructivo Motor Induccion PDFjuan mendezNo ratings yet
- Variador de Velocidad Motor AcDocument38 pagesVariador de Velocidad Motor Acrd20081587No ratings yet
- M 389Document66 pagesM 389Adrian MarquezNo ratings yet
- Aplicación de Los Sistemas de Control de Velocidad Al Motor de Corriente ContinuaDocument9 pagesAplicación de Los Sistemas de Control de Velocidad Al Motor de Corriente ContinuaGonzalo Avalos PalominoNo ratings yet
- MAQ REP4 NicolaldeDocument23 pagesMAQ REP4 NicolaldeJavier Daniel NikolaldeNo ratings yet
- TP7_EP_5R1_G01Document13 pagesTP7_EP_5R1_G01MaycoNo ratings yet
- Variador de FrecuenciaDocument21 pagesVariador de FrecuenciautghstghsNo ratings yet
- Monografia VariadoresDocument40 pagesMonografia VariadoresFrank Ayque C.No ratings yet
- IPP-Coautor - IPP Preced. Arranque Tens ReDocument11 pagesIPP-Coautor - IPP Preced. Arranque Tens ReFernando L VargasNo ratings yet
- El motor síncrono trifásicoDocument14 pagesEl motor síncrono trifásicoKevin LazaroNo ratings yet
- Regulacion y Control Electronico de Motores ElectricosDocument22 pagesRegulacion y Control Electronico de Motores Electricosing11unsa100% (1)
- Control de Fase Motor Continua Con ArduinoDocument62 pagesControl de Fase Motor Continua Con ArduinoHadriano Ramirez Gonzalez100% (1)
- Control de 07Document9 pagesControl de 07MOISES TEVEZ HUAMANNo ratings yet
- Auto Electrico Basado en Motor TrifasicoDocument91 pagesAuto Electrico Basado en Motor TrifasiconanoroloNo ratings yet
- Proyecto PrácticaDocument15 pagesProyecto PrácticaEsteban Toro OrozcoNo ratings yet
- Practica Unidad 4 - Sistemas MecatrónicosDocument12 pagesPractica Unidad 4 - Sistemas MecatrónicosJesus ArguellesNo ratings yet
- Control MCCDocument12 pagesControl MCCcatapaz1818No ratings yet
- Tesis Gonzalez Sergio PDFDocument301 pagesTesis Gonzalez Sergio PDFWilson Fernando Rodríguez RodríguezNo ratings yet
- Curva Característica de Un Motor EléctricoDocument75 pagesCurva Característica de Un Motor EléctricoEdgar Gabriel OrtizNo ratings yet
- Informe Control de Potencia PDFDocument11 pagesInforme Control de Potencia PDFBenjamín Troncoso GonzálezNo ratings yet
- Informe ServoValvulas PDFDocument11 pagesInforme ServoValvulas PDFFranco Celis VallejosNo ratings yet
- Informe ServoValvulas PDFDocument11 pagesInforme ServoValvulas PDFFranco Celis VallejosNo ratings yet
- Laboratorio 9Document6 pagesLaboratorio 9Mario Alberto Molina PandiaNo ratings yet
- Control de PotenciaDocument61 pagesControl de Potenciacsoto1234No ratings yet
- Gonzales VM PDFDocument77 pagesGonzales VM PDFAndres Alva JustoNo ratings yet
- Tesis de UNCPDocument76 pagesTesis de UNCPAbelardo Zcarias CardenasNo ratings yet
- Filtro Activo ParaleloDocument165 pagesFiltro Activo ParaleloAndresPalaciosNo ratings yet
- Teoría de Los Variadores de VelocidadDocument59 pagesTeoría de Los Variadores de VelocidadEmilio Bonnet100% (1)
- Arranque Por Resistencias Estatóricas de Un Motor de Inducción TrifásicoDocument14 pagesArranque Por Resistencias Estatóricas de Un Motor de Inducción TrifásicoJoselo FloresNo ratings yet
- LABORATORIO No17 - CIRCUITO VARIADOR DE FRECUENCIADocument13 pagesLABORATORIO No17 - CIRCUITO VARIADOR DE FRECUENCIALuis Angel MercadoNo ratings yet
- Laboratorio Aplicativo 01Document9 pagesLaboratorio Aplicativo 01Charles ChaplinNo ratings yet
- PM LatexDocument10 pagesPM LatexGiovana MoralesNo ratings yet
- Proyecto Variador de FrecuenciaDocument18 pagesProyecto Variador de Frecuenciadiego baltazarNo ratings yet
- Guia Técnica Completa Drives ABBDocument376 pagesGuia Técnica Completa Drives ABBAndy AriasNo ratings yet
- Fuentes BL PDFDocument93 pagesFuentes BL PDFAlvaro RivasNo ratings yet
- Dispositivos de Control ElectricoDocument10 pagesDispositivos de Control ElectricoAlex LeónNo ratings yet
- 10 - Informe Maquinas IDocument4 pages10 - Informe Maquinas ILaura RodríguezNo ratings yet
- Armado de Tablero para Control de Variador de FrecuenciaDocument10 pagesArmado de Tablero para Control de Variador de FrecuenciaJoseph David Cahuaya LauraNo ratings yet
- Laboratorio 05 Ingeniería de Control GARCÍA TAPIADocument13 pagesLaboratorio 05 Ingeniería de Control GARCÍA TAPIABrayan Montalban GarciaNo ratings yet
- Controlador DC motorDocument23 pagesControlador DC motorOscar Laica100% (1)
- Modelado y Control de Pequeños Sistemas de Conversion de Energia Eolica Basados en Maquinas Sincronas de Imanes PermanentesDocument131 pagesModelado y Control de Pequeños Sistemas de Conversion de Energia Eolica Basados en Maquinas Sincronas de Imanes PermanenteshsesmaNo ratings yet
- ELI329 Exp 6 Informe CSSDocument15 pagesELI329 Exp 6 Informe CSSBenjamín Troncoso GonzálezNo ratings yet
- Arranque Por Variador de Velocidad o FrecuenciaDocument17 pagesArranque Por Variador de Velocidad o FrecuenciaJulio Damian Saldaña LopezNo ratings yet
- CR 02Document7 pagesCR 02Victor Manuel Valdez del BosqueNo ratings yet
- Control de Velocidad de Un Motor de CC en Lazo CerradoDocument18 pagesControl de Velocidad de Un Motor de CC en Lazo CerradoGonzaGoglioNo ratings yet
- Informe 7 Maquinas ElectricasDocument8 pagesInforme 7 Maquinas ElectricasAlonzo Sierra valdiviaNo ratings yet
- TP TDEE Mejorado 1Document65 pagesTP TDEE Mejorado 1José BrusquettiNo ratings yet
- Fundamentos de Hidráulica - Quirion PDFDocument313 pagesFundamentos de Hidráulica - Quirion PDFramirez camones pabel100% (1)
- Control de motor trifásico mediante PWM y lazo cerrado digitalDocument10 pagesControl de motor trifásico mediante PWM y lazo cerrado digitalFelipe Cañete CanalesNo ratings yet
- Informe7 Grupo4 RomeroReynosoAnthonyPabloDocument7 pagesInforme7 Grupo4 RomeroReynosoAnthonyPabloanthony RomeroNo ratings yet
- CTRL Pid y PWM para MotorDocument24 pagesCTRL Pid y PWM para Motorvifernandezs0% (1)
- Lab - 08 - Control de Velocidad de Un Motor TrifásicoDocument25 pagesLab - 08 - Control de Velocidad de Un Motor TrifásicoJoe QHNo ratings yet
- Informe Final #3 - El Transistor de Efecto de Campo - Laboratorio de Electrónica IDocument31 pagesInforme Final #3 - El Transistor de Efecto de Campo - Laboratorio de Electrónica Ijowa123No ratings yet
- Proyecto de ReguladoresDocument23 pagesProyecto de ReguladoresBrayan rodriguez gutierrezNo ratings yet
- Rectificador Trifasico Controlado 5000W PDFDocument32 pagesRectificador Trifasico Controlado 5000W PDFBrunno SurcoNo ratings yet
- Ejercicio 2.2 SagtastumeDocument8 pagesEjercicio 2.2 Sagtastumeosiris sagastumeNo ratings yet
- Taller 3 SISTEMA DE MANDOS ELÉCTRICOSDocument36 pagesTaller 3 SISTEMA DE MANDOS ELÉCTRICOSRaul Alonso Melendez Avila100% (1)
- Predicción y optimización de emisiores y consumo mediante redes neuronales en motores diéselFrom EverandPredicción y optimización de emisiores y consumo mediante redes neuronales en motores diéselNo ratings yet
- Radiologia de Propositos GeneralesDocument67 pagesRadiologia de Propositos Generalesjopacame0% (1)
- Manual de Seguridad para Laboratorios PDFDocument37 pagesManual de Seguridad para Laboratorios PDFfrankruedaboteroNo ratings yet
- Upc - 01 - Cubículo de 1 Cama UtiDocument2 pagesUpc - 01 - Cubículo de 1 Cama UtiMarioyfernanda Guerra MuruaNo ratings yet
- D102. Guia Hospitales Mediana (Atencion Ambulatoria-Consultas) Nov 2019Document14 pagesD102. Guia Hospitales Mediana (Atencion Ambulatoria-Consultas) Nov 2019Marioyfernanda Guerra MuruaNo ratings yet
- Estándares y Normativas de Zonas Peligrosas PDFDocument18 pagesEstándares y Normativas de Zonas Peligrosas PDFAbner DavalosNo ratings yet
- Dto 594 - 29 Abr 2000Document57 pagesDto 594 - 29 Abr 2000roroNo ratings yet
- Protecciones Electricas-SchneiderDocument197 pagesProtecciones Electricas-SchneiderEdson Berrios100% (3)
- LIBRO ANESTESIA LOCORREGIONAL Word TOMO IVDocument171 pagesLIBRO ANESTESIA LOCORREGIONAL Word TOMO IVMarioyfernanda Guerra MuruaNo ratings yet
- Comparacion de Configuraciones de Diseno de Sistemas UPSDocument32 pagesComparacion de Configuraciones de Diseno de Sistemas UPSCristhianNo ratings yet
- IEC 60076-11 Trafos-Secos Esp PDFDocument40 pagesIEC 60076-11 Trafos-Secos Esp PDFnovitopo100% (4)
- Ficha Tecnica TRIHAL 3150KVA - 25000V - 420V - ECODISEÑODocument1 pageFicha Tecnica TRIHAL 3150KVA - 25000V - 420V - ECODISEÑOMarioyfernanda Guerra MuruaNo ratings yet
- IEC 60076-11 Trafos-Secos Esp PDFDocument40 pagesIEC 60076-11 Trafos-Secos Esp PDFnovitopo100% (4)
- AnestesicosDocument38 pagesAnestesicosLuis Fernando CriolloNo ratings yet
- Schneider - Merli Gerin - Transformadores Gama TrihalDocument30 pagesSchneider - Merli Gerin - Transformadores Gama TrihalEdgar MoyaoNo ratings yet
- Manual de Sistemas de Protecciones PDFDocument173 pagesManual de Sistemas de Protecciones PDFJose Cordero100% (1)
- Prisma Plus - 08204 PDFDocument2 pagesPrisma Plus - 08204 PDFMarioyfernanda Guerra MuruaNo ratings yet
- Grupos Electrogenos PDFDocument27 pagesGrupos Electrogenos PDFDaniel SeguraNo ratings yet
- Informe Opinion y Observaciones Coordinados CDEC SING PDFDocument51 pagesInforme Opinion y Observaciones Coordinados CDEC SING PDFMarioyfernanda Guerra MuruaNo ratings yet
- Normativa de Accesibilidad Universal Dibujada y Comentada D50 y DDU OGUC Chile Ciudad Accesible 2018 Block V3 14072018Document106 pagesNormativa de Accesibilidad Universal Dibujada y Comentada D50 y DDU OGUC Chile Ciudad Accesible 2018 Block V3 14072018sebastianossaNo ratings yet
- Protocolo de Seguridad ElectricaDocument6 pagesProtocolo de Seguridad Electricamari lizeth flores rimapaNo ratings yet
- Ficha Técnica Webcrete 95Document2 pagesFicha Técnica Webcrete 95German Lira RomoNo ratings yet
- 0054aa45 003ad936Document1 page0054aa45 003ad936Marioyfernanda Guerra MuruaNo ratings yet
- Sonnenschein A700 T EsDocument12 pagesSonnenschein A700 T EsMarioyfernanda Guerra MuruaNo ratings yet
- Normativa de Accesibilidad Universal Dibujada y Comentada D50 y DDU OGUC Chile Ciudad Accesible 2018 Block V3 14072018Document106 pagesNormativa de Accesibilidad Universal Dibujada y Comentada D50 y DDU OGUC Chile Ciudad Accesible 2018 Block V3 14072018sebastianossaNo ratings yet
- Maquinas Sincronas PDFDocument28 pagesMaquinas Sincronas PDFFercho MbNo ratings yet
- Res 2155 InstalacionesDocument42 pagesRes 2155 InstalacionesMarioyfernanda Guerra MuruaNo ratings yet
- Ficha Tecnica Synergy Essence y Excellence PDFDocument40 pagesFicha Tecnica Synergy Essence y Excellence PDFKimberly DzoaraNo ratings yet
- InstalacionesDocument32 pagesInstalacioneslucasagomezNo ratings yet
- Estrategia de Mantenimiento de Centro de Datos APC PDFDocument20 pagesEstrategia de Mantenimiento de Centro de Datos APC PDFAlfredo Mamani RozanNo ratings yet
- AccI semII Cert1 05Document2 pagesAccI semII Cert1 05René Ricardo Hurtado DíazNo ratings yet
- Cantando la alegría de vivirDocument24 pagesCantando la alegría de vivirVicky HdzNo ratings yet
- Matriz InternetDocument28 pagesMatriz InternetPEDRO MENDOZANo ratings yet
- Clase 4 MAISDocument20 pagesClase 4 MAISMaca GallardoNo ratings yet
- Ensayo-Métodos de Muestreo para Los Distintos Tipos de Muestras.Document9 pagesEnsayo-Métodos de Muestreo para Los Distintos Tipos de Muestras.ch'ujuk yaakunajNo ratings yet
- III Domingo de Pascua Ciclo ADocument2 pagesIII Domingo de Pascua Ciclo AMarcelaNo ratings yet
- El Sello Del Espíritu SantoDocument4 pagesEl Sello Del Espíritu Santocarloaldfer777No ratings yet
- Cómo proteger tu información en InternetDocument5 pagesCómo proteger tu información en InternetASAHEL GABRIEL GALAN LOPEZNo ratings yet
- EnsayoDocument4 pagesEnsayoSofía Edith González MontezumaNo ratings yet
- Dequeismo y QueismoDocument10 pagesDequeismo y QueismoCarlos Arturo AlzateNo ratings yet
- CreatividadDocument29 pagesCreatividadKEVIN ARMANDO ONATE DAZA (:-)No ratings yet
- FGGFDocument300 pagesFGGFRichard Inga HuamanNo ratings yet
- Guía Geolodía Cantabria-17Document4 pagesGuía Geolodía Cantabria-17barbaregidorfjNo ratings yet
- Pag 8 GRADO7Document1 pagePag 8 GRADO7Yenny Samire Unriza0% (1)
- Gritos del corazón y la soledadDocument13 pagesGritos del corazón y la soledadKevin JesusNo ratings yet
- CAP IV Presente y Porvenir de Los Derechos Humanos ResumenDocument3 pagesCAP IV Presente y Porvenir de Los Derechos Humanos ResumenJazmin RamirezNo ratings yet
- PEDIATRIADocument3 pagesPEDIATRIAMarcelo Fabian AsprelaNo ratings yet
- Nestor Gutierrez 25768Document9 pagesNestor Gutierrez 25768Floranny Celeste RangelNo ratings yet
- Planta Procesadora de CitricosDocument124 pagesPlanta Procesadora de CitricosGabriel Martinez100% (1)
- Hidrologia SatelitalDocument7 pagesHidrologia SatelitalRobert Jhonatan Chavez MontañezNo ratings yet
- Calzado 3D: distribución, demanda creciente y cadena de valorDocument2 pagesCalzado 3D: distribución, demanda creciente y cadena de valorIvan FpNo ratings yet
- Laboratorio 5Document7 pagesLaboratorio 5Roberto CastilloNo ratings yet
- UP02 Preguntas TeoricasDocument11 pagesUP02 Preguntas TeoricasRaycoNo ratings yet
- Resumen RCDFDocument25 pagesResumen RCDFJr RamónNo ratings yet
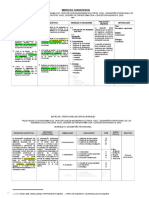
- Matriz de Operacionalizacion y ConsistenciaDocument3 pagesMatriz de Operacionalizacion y ConsistenciaLeonardo Chambilla Vega100% (1)
- Lectura 10Document3 pagesLectura 10Yakii MendozaNo ratings yet
- Curso de Líquidos Penetrantes Nivel I-II con CertificaciónDocument1 pageCurso de Líquidos Penetrantes Nivel I-II con CertificaciónAndyNo ratings yet
- Órganos de gobierno ONGDocument8 pagesÓrganos de gobierno ONGEdith MartinezNo ratings yet
- Ejercicios Ingenieria EconomicaDocument5 pagesEjercicios Ingenieria EconomicaAlfredo CaballeroNo ratings yet
- Introducción A Los Sistemas - Segundo ParcialDocument3 pagesIntroducción A Los Sistemas - Segundo ParcialLeonidas RosesNo ratings yet
- td7 CoreccionDocument26 pagestd7 CoreccionLuz AnchiraicoNo ratings yet