You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Jee Advanced PaperDocument3 pagesJee Advanced PaperGaurav YadavNo ratings yet
- IB Lite 1 11 0 New FeaturesDocument11 pagesIB Lite 1 11 0 New Featuresm.n.malasNo ratings yet
- LatheDocument74 pagesLatheChandrakantha K100% (1)
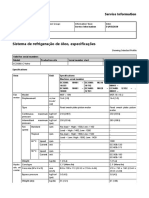
- Sistema de Refrigeração de Óleo, EspecificaçõesDocument2 pagesSistema de Refrigeração de Óleo, EspecificaçõesAlexandreNo ratings yet
- Surveying PDFDocument215 pagesSurveying PDFShaira Mae Cañedo100% (1)
- Mathematics (0580/13) October/November 2019Document12 pagesMathematics (0580/13) October/November 2019kdebipershadNo ratings yet
- PowerPoint Practice Exercise 1 InstructionsDocument3 pagesPowerPoint Practice Exercise 1 InstructionsErick OumaNo ratings yet
- CAD-based Design of Three Phase Transformer and CoDocument13 pagesCAD-based Design of Three Phase Transformer and CoM4gne7icNo ratings yet
- PhysioEx Ex. 9 Act. 2Document4 pagesPhysioEx Ex. 9 Act. 2Juvy Anne LozanoNo ratings yet
- S1Agile EN RN I.1 PDFDocument10 pagesS1Agile EN RN I.1 PDFCorey PorterNo ratings yet
- Reversible and Irreversible ChangesDocument10 pagesReversible and Irreversible ChangesXerish DewanNo ratings yet
- SB 234Document9 pagesSB 234JolettitoNo ratings yet
- Soda Ash PDFDocument45 pagesSoda Ash PDFM TNo ratings yet
- Normativ Panouri SandwichDocument58 pagesNormativ Panouri SandwichAlex ChiraNo ratings yet
- Complete Operator Training Manual PDFDocument397 pagesComplete Operator Training Manual PDFJacc jacc100% (2)
- CA-Clipper For DOS Version 5.3 Programming and Utilities GuideDocument718 pagesCA-Clipper For DOS Version 5.3 Programming and Utilities GuideChris Harker91% (11)
- Sample Questions Paper 2 - TNQT Digital-4July19Document6 pagesSample Questions Paper 2 - TNQT Digital-4July19Gudimetla KowshikNo ratings yet
- Cree CGH40006pDocument15 pagesCree CGH40006pQazi KamalNo ratings yet
- RS 385SHDocument3 pagesRS 385SHshahpinkalNo ratings yet
- Syllabus 3210 Fall 2012 PDFDocument4 pagesSyllabus 3210 Fall 2012 PDFRahul KarnaNo ratings yet
- Subjects Revised Curriculum BS ELECTRICAL ENGINEERINGDocument18 pagesSubjects Revised Curriculum BS ELECTRICAL ENGINEERINGData StatsNo ratings yet
- Time Value of Money:: "Money Is An Arm or Leg. You Either Use It or Lose It." - Henry FordDocument33 pagesTime Value of Money:: "Money Is An Arm or Leg. You Either Use It or Lose It." - Henry FordramunagatiNo ratings yet
- Chemical Principles Notes Chapter 7Document86 pagesChemical Principles Notes Chapter 7Robert GardnerNo ratings yet
- Humiseal 1C49Lv Silicone Conformal Coating Technical Data SheetDocument2 pagesHumiseal 1C49Lv Silicone Conformal Coating Technical Data Sheetmario230991No ratings yet
- Datasheet Cpu 416-2Document13 pagesDatasheet Cpu 416-2Danu MaldinoNo ratings yet
- Upflow Anaerobic Sludge Blanket-Hollow Centered Packed Bed (UASB-HCPB) Reactor For Thermophilic Palm Oil Mill Effluent (POME) TreatmentDocument12 pagesUpflow Anaerobic Sludge Blanket-Hollow Centered Packed Bed (UASB-HCPB) Reactor For Thermophilic Palm Oil Mill Effluent (POME) TreatmentAgung Ariefat LubisNo ratings yet
- Change ManDocument17 pagesChange Mansrikanth9gannuNo ratings yet
- Chapter 6: Fatigue Failure: Introduction, Basic ConceptsDocument21 pagesChapter 6: Fatigue Failure: Introduction, Basic ConceptsNick MezaNo ratings yet
- IT6602 SA Coaching Class QuestionsDocument3 pagesIT6602 SA Coaching Class QuestionsvinothNo ratings yet
- Upstream Process Engineering Course: 5. Produced WaterDocument27 pagesUpstream Process Engineering Course: 5. Produced WaterMohamed SelimNo ratings yet