Professional Documents
Culture Documents
Apuntes de Ingeniería de Fabricación
Uploaded by
liliputienses69Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Apuntes de Ingeniería de Fabricación
Uploaded by
liliputienses69Copyright:
Available Formats
Universidad Politcnica de Cartagena
E.T.S. Ingeniera Industrial
Departamento de Ingeniera de Materiales y Fabricacin
U
N
I
V
E
R
S
I
D
A
D
P
O
L
I
T
CN
I
C
A
D
E
C
A
R
T
A
G
E
N
A
F
e
c
h
o
s
Allend
M
a
r
Apuntes de Ingeniera de Fabricacin
Manuel Estrems Amestoy
Cartagena, 2004
2
Captulo 1
ndice general
1. ndice general 3
2. Introduccin a la Ingeniera de Fabricacin 7
2.1. Conceptos de Ciencia, Tecnologa e Ingeniera . . . . . . . . . . . . . 7
2.2. Aproximacin a la Ingeniera de Fabricacin . . . . . . . . . . . . . . 8
3. Introduccin a los procesos de mecanizado 11
3.1. Introduccin histrica . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2. Introduccin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.3. Generacin de supercies . . . . . . . . . . . . . . . . . . . . . . . . 14
3.4. Formacin de viruta . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.5. Geometra de corte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.5.1. Inuencia de los ngulos de corte en el funcionamiento . . . . 21
3.6. Fuerzas de corte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.6.1. Energa especca de corte . . . . . . . . . . . . . . . . . . . . 22
3.6.2. Fuerzas de friccin . . . . . . . . . . . . . . . . . . . . . . . . 22
3.7. Temperaturas de corte . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.8. Desgaste de herramientas . . . . . . . . . . . . . . . . . . . . . . . . 25
3.9. Fluidos de corte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.10. Materiales de herramienta . . . . . . . . . . . . . . . . . . . . . . . . 26
3.11. Maquinabilidad de materiales . . . . . . . . . . . . . . . . . . . . . . 27
3.12. Rugosidad supercial . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.13. Problemas de mecanizado . . . . . . . . . . . . . . . . . . . . . . . . 28
3
4 Captulo 1. ndice general
4. Planicacin de la fabricacin 33
4.1. Introduccin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2. Partes de la planicacin de procesos . . . . . . . . . . . . . . . . . . 34
4.3. Estudio de la informacin geomtrica del plano . . . . . . . . . . . . 34
4.3.1. Numeracin de supercies . . . . . . . . . . . . . . . . . . . . 34
4.3.2. Anlisis de las especicaciones de las supercies . . . . . . . . 35
4.3.3. Anlisis de la preforma . . . . . . . . . . . . . . . . . . . . . 35
4.4. Determinacin de los volmenes de mecanizado. Asociacin de su-
percies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.5. Determinacin de procesos y secuencia de mecanizado . . . . . . . . 36
4.6. Seleccin de supercies de referencia y sujecin . . . . . . . . . . . . 38
4.7. Seleccin de mquinas herramientas . . . . . . . . . . . . . . . . . . 39
4.8. Seleccin de herramientas . . . . . . . . . . . . . . . . . . . . . . . . 39
4.9. Establecimiento de los datos de corte . . . . . . . . . . . . . . . . . . 40
4.10. Eleccin o diseo de utillaje . . . . . . . . . . . . . . . . . . . . . . . 40
4.10.1. Funciones del amarre . . . . . . . . . . . . . . . . . . . . . . . 41
4.10.2. Importancia de un buen diseo del amarre en fabricacin . . 41
4.11. Otras operaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.12. Clculo de tiempos y costes de fabricacin . . . . . . . . . . . . . . . 42
4.12.1. Tiempo de produccin . . . . . . . . . . . . . . . . . . . . . . 42
4.12.2. Coste de produccin . . . . . . . . . . . . . . . . . . . . . . . 43
4.12.3. Eciencia econmica . . . . . . . . . . . . . . . . . . . . . . . 43
4.12.4. Seleccin de la velocidad de corte . . . . . . . . . . . . . . . . 43
4.13. Economa de mecanizado . . . . . . . . . . . . . . . . . . . . . . . . 44
5. Diseo y anlisis de utillajes de amarre 49
5.1. Eleccin o diseo de utillaje . . . . . . . . . . . . . . . . . . . . . . . 49
5.1.1. Funciones del amarre . . . . . . . . . . . . . . . . . . . . . . . 50
5.1.2. Importancia de un buen diseo del amarre en fabricacin . . 50
5.1.3. Seleccin de factores a analizar . . . . . . . . . . . . . . . . . 50
5.1.4. Metodologa del anlisis . . . . . . . . . . . . . . . . . . . . . 51
5.2. Estudio de la precisin de la operacin de la operacin . . . . . . . . 52
5.2.1. Posicionamiento real de las supercies de referencia . . . . . . 53
5.2.2. Posicionamiento de los puntos de cota . . . . . . . . . . . . . 54
5.2.3. Valor de cota esperado . . . . . . . . . . . . . . . . . . . . . . 55
5.2.4. Estimacin de la incertidumbre de fabricacin esperada . . . 55
5.2.5. Ejemplos Prcticos . . . . . . . . . . . . . . . . . . . . . . . . 56
5.3. Clculo mecnico de amarres . . . . . . . . . . . . . . . . . . . . . . 60
5.3.1. Determinacin de las fuerzas de apriete . . . . . . . . . . . . 61
5.3.2. Accin sobre mecanismos de apriete ms usuales . . . . . . . 64
5.3.3. Anlisis de fuerzas de contacto del amarre . . . . . . . . . . . 68
5.4. Anlisis de las tensiones de contacto . . . . . . . . . . . . . . . . . . 77
5.4.1. Distribucin de presiones entre supercies en contacto para
distintas geometras . . . . . . . . . . . . . . . . . . . . . . . 78
5
5.4.2. Determinacin del dao en la pieza . . . . . . . . . . . . . . . 87
6. Procesos de conformado por deformacin plstica 97
6.1. Introduccin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6.2. Deformacin permanente en metales . . . . . . . . . . . . . . . . . . 97
6.3. Curva del ensayo de traccin . . . . . . . . . . . . . . . . . . . . . . 98
6.3.1. Modelizacin del material . . . . . . . . . . . . . . . . . . . . 100
6.3.2. Punto de inestabilidad . . . . . . . . . . . . . . . . . . . . . . 100
6.4. Trabajo de deformacin . . . . . . . . . . . . . . . . . . . . . . . . . 101
6.5. Laminacin de chapa metlica . . . . . . . . . . . . . . . . . . . . . . 101
6.6. Tecnologas de transformacin de chapa metlica . . . . . . . . . . . 102
6.7. Problemas de deformacin plstica . . . . . . . . . . . . . . . . . . . 103
7. Proceso de conformado por fundicin 107
7.1. Introduccin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
7.2. Metal fundido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
7.3. Tecnologas de moldeo . . . . . . . . . . . . . . . . . . . . . . . . . . 109
7.4. Colada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
7.5. Solidicacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
7.6. Problemas de Fundicin . . . . . . . . . . . . . . . . . . . . . . . . . 110
8. Problemas 113
8.1. Problemas de metrologa . . . . . . . . . . . . . . . . . . . . . . . . . 113
8.2. Problemas de mecanizado . . . . . . . . . . . . . . . . . . . . . . . . 114
8.3. Economa de mecanizado . . . . . . . . . . . . . . . . . . . . . . . . 118
8.4. Problemas de deformacin plstica . . . . . . . . . . . . . . . . . . . 121
8.5. Fundicin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
9. Cuestiones de examen 125
6 Captulo 1. ndice general
Captulo 2
Introduccin a la Ingeniera de
Fabricacin
2.1. Conceptos de Ciencia, Tecnologa e Ingeniera
Antes de profundizar en aquellos aspectos en los que va a desarrollarse la activi-
dad del Ingeniero, es preciso distinguir entre los conceptos de Ingeniera, Tecnologa
y Ciencia. Estos conceptos a pesar de ser conocidos y utilizados por todo el mundo,
casi siempre de manera intuitiva, esconden en s mismos una serie de importan-
tes matices, sin los que resultara muy difcil comprender cul es la formacin que
necesita el Ingeniero Industrial y su cometido.
La denicin clsica de ciencia viene dada por Aristteles como conocimiento
cierto por sus causas. Es un saber subordinado a unos principios a quienes debe
su validez, como el principio de causalidad, nalidad, etc. El concepto de ciencia es
muy amplio y abarca el estudio de las realidades tanto materiales como espirituales.
En cuanto al concepto de Tecnologa, puede aceptarse la siguiente denicin:
accin deliberada del hombre sobre la naturaleza que sea til para la consecucin
del objetivo previsto (no por el conocimiento en s mismo), presentando una doble
dimensin: conocimiento y ejecucin (accin, maneras de hacer). Por tanto la ac-
cin Tecnolgica no puede tener lugar si no existe un previo conocimiento de las
maneras de realizar las actividades, lo que se conoce como procesamiento, e
implica conocer el tipo de operaciones a realizar (cambio de posicin, de forma,
etc.) y la forma de ejecutar las mismas (manualmente, asistida por herramientas,
mquina-herramienta, etc.)
Aunque inicialmente la accin tecnolgica slo pudo efectuarse sobre simples
procesamientos de materia, a medida que sta ha ido evolucionando, el hombre ha
7
8 Captulo 2. Introduccin a la Ingeniera de Fabricacin
sido capaz de procesar no slo materia sino tambin energa e informacin. Sobre
estos tres pilares, y por medio de los adecuados procesos, el hombre obtiene pro-
ductos tecnolgicos, cambios fsicos (cambio de posicin, forma, etc.), dispositivos
y aparatos, transformaciones de materiales, energa en forma utilizable, condiciones
ambientales, informacin de uso en tecnologa, informacin para consumo, etc.
Se puede denir Ingeniera como la materializacin de la accin deliberada del
hombre sobre la naturaleza. En consecuencia, la Ingeniera se ocupa de la aplicacin
prctica del conocimiento, es decir, de aspectos tales como el diseo, la fabricacin,
los costes o la distribucin de los recursos.
A nales del siglo XVIII la Ingeniera ha ido evolucionando en el tiempo hasta
el punto de que hoy en da se considera que la Ingeniera engloba a la Tecnologa y
va ms all de sus planteamientos. Actualmente se asume conceptualmente que las
caractersticas bsicas que denen la Ingeniera son dos. La primera caracterstica es
que la Ingeniera aade a los tres pilares bsicos de la Tecnologa (materia, energa
e informacin) dos nuevos: los recursos econmicos y humanos, que deben de ser
gestionados y coordinados para llevar a cabo la produccin de bienes y servicios. La
segunda hace referencia al carcter generalmente local y concreto de la Ingeniera
frente a la universalidad de la Tecnologa.
2.2. Aproximacin a la Ingeniera de Fabricacin
Uno de los hechos que ha diferenciado al hombre desde la Prehistoria, ha sido la
capacidad de procesar o transformar los materiales que la naturaleza ha puesto a su
disposicin, para la elaboracin de herramientas y tiles que le ayudaran a realizar
ciertas funciones que no podra llevar a cabo directamente con su esfuerzo fsico, o
le resultaban pesadas o costosas.
Esta actividad del hombre de realizar tiles, mquinas, etc., recurriendo a su
ingenio e inteligencia, tratando de cubrir las necesidades (primarias y secundarias)
de los individuos o de la comunidad, lleva consigo la utilizacin de una gran cantidad
de recursos tanto humanos como materiales. De la conjuncin de estos recursos
depender la realizacin del producto nal, actividad que exige la realizacin de
tres fases:
Fase de informacin, en la cual se lleva a cabo la adquisicin de los conoci-
mientos para la ejecucin de los mismos, mediante un trabajo de investigacin.
Fase de diseo, que consiste en la concepcin del producto de acuerdo con los
requerimientos exigidos.
Fase de fabricacin, en que se efecta la transformacin de los materiales hasta
obtener el producto terminado.
En esta tercera fase es en la que se inserta la Ingeniera de Fabricacin, pero sin
olvidar aquellos aspectos de las fases iniciales que en cierta forma tienen repercusin
sobre la misma.
2.2. Aproximacin a la Ingeniera de Fabricacin 9
Una posible denicin de Ingeniera de Fabricacin podra ser la siguiente: con-
junto de conocimientos referentes a procesos de conformacin de los ma-
teriales; a las mquinas, tiles, instrumentos y sistemas de fabricacin
utilizados; y a los controles y vericaciones necesarias para asegurar pie-
zas y productos acordes con las normas y especicaciones establecidas,
bajo criterios econmicos y de rentabilidad.
10 Captulo 2. Introduccin a la Ingeniera de Fabricacin
Captulo 3
Introduccin a los procesos de
mecanizado
3.1. Introduccin histrica
Las tcnicas de corte de metales han sufrido una notable evolucin hasta llegar
a las mquinas herramienta de control numrico de nuestros das, que son capaces
de llevar a cabo operaciones de corte complicadas mediante la ejecucin de un
programa. El desarrollo de estos procesos ha venido marcado por factores tales
como la obtencin de mecanismos capaces de articular el movimiento de corte,
la aparicin de mquinas de generacin de energa como la mquina de vapor, la
implantacin de tcnicas de control numrico y la investigacin acerca de nuevos
materiales para herramientas.
El empleo de los procesos de arranque de material para la fabricacin de compo-
nentes se remonta a la Prehistoria. Los primeros materiales que fueron conformados
por arranque de material fueron la piedra y la madera. Existen evidencias arqueo-
lgicas de que los egipcios emplearon mecanismos rotatorios formados por palos y
cuerdas para realizar taladros.
Posteriormente se trataron de aplicar los procesos que se haban desarrollado
para el corte de materiales como la madera, para la conformacin de piezas metli-
cas. Una de las primeras mquinas para el corte de metales es el torno de prtiga,
que se invent alrededor de 1250.
A principios del siglo XV se dise un torno con transmisin por correa y accio-
namiento mediante una manivela. Durante esta poca se produjeron avances como
el diseo de un torno para roscar por Leonardo da Vinci, la construccin de una
mquina cepilladora en 1550 por Marx Lobsinger, la introduccin del contrapunto
11
12 Captulo 3. Introduccin a los procesos de mecanizado
en el torno, el apoyo de la herramienta y el mandril alrededor de 1568 y el diseo de
un torno con carro porta-herramientas conocido como torno de Vaucason en 1760.
Algunos autores consideran que la primera mquina herramienta fue la mandri-
nadora de John Wilkinson, construida alrededor de 1774. La energa consumida por
esta mquina perforadora era suministrada por medio de un accionamiento hidru-
lico y sin ella no habra sido posible fabricar la mquina de vapor de James Watt.
Cuando James Watt dise su mquina de vapor en Inglaterra alrededor de 1763,
uno de los problemas con que tropez fue la necesidad de que la supercie interior
del cilindro presentara la precisin suciente para que el vapor no se escapase por
el lateral del pistn. Hasta que apareci la mquina mandrinadora de John Wilkin-
son no existan mtodos adecuados para obtener tolerancias tan estrechas como las
requeridas para la mquina de vapor de James Watt.
Despus de los diseos elaborados por Leonardo da Vinci en el siglo XV y Bes-
son en 1569, Henry Maudsley desarroll el primer torno cortador de tornillos en
Inglaterra alrededor de 1800. Algunos autores consideran que la primera mquina
cepilladora fue la construida por Roberts en 1817, pero en realidad esta catego-
ra corresponde a la mquina fabricada por Bramah en 1802. La primera mquina
fresadora fue construida por Eli Whitney en Estados Unidos en 1818. En 1835,
Whitworth fabric un taladro de columna y en 1836 James Nasmyth dise la pri-
mera mquina limadora.
El primer torno automtico fue construido por Shipe en 1842. La mquina de
vapor permiti automatizar el movimiento de avance de la herramienta, haciendo
posible efectuar las operaciones de roscado con una precisin mucho mayor. En 1846
James Nasmyth construy una mquina de taladrar que hizo posible la ejecucin
de agujeros de gran precisin y en 1851 Cocquilhat public el primer trabajo cien-
tco sobre el corte de metales, estableciendo las primeras relaciones entre energa
consumida y material separado en el taladrado. En 1860 Moseley fabric la pri-
mera recticadora cilndrica y Joesel llev a cabo las primeras experiencias sobre
velocidades de corte y ngulos de lo recomendables para procesos de mecaniza-
do, basndose en la relacin entre la cantidad de material separado y la energa
absorbida.
En 1861 la rma Brown y Sharpe construy la primera fresadora universal.
En 1871 se empezaron a utilizar herramientas de acero aleado y en 1891 Acheson
descubri el primer abrasivo articial, el carburo de silicio. Despus de los primeros
estudios sobre formacin de la viruta, realizados por Time en 1870, y los estudios
sobre la formacin de la viruta como un proceso de deformacin plstica, as como la
inuencia de los lubricantes, llevados a cabo por Malloch en 1881, en 1893 Zovrykin
efectu un estudio sobre la geometra de la viruta y de las fuerzas de corte.
En 1898 la sociedad Pratt y Whitney construy un torno automtico con carga-
dor automtico de piezas. La primera brochadora fue construida en 1899 por Smith
y Coventry. En 1898 Taylor y White fabricaron las primeras herramientas de acero
rpido y en 1906 se mejoraron las propiedades de estas herramientas con la adicin
de vanadio. En 1907 Taylor y White publicaron el trabajo On the art of cutting
metals y en 1925 Schlesinger llev a cabo la medicin de las fuerzas de corte y
3.2. Introduccin 13
estableci normas para la vericacin de mquinas-herramienta. Un ao despus,
en 1926, Hebert demostr que la formacin de la viruta est unida a un proceso de
cizallamiento.
En 1930 la rma alemana Krupp comenz a fabricar herramientas de metal du-
ro o carburo sinterizado. Estas herramientas estaban constituidas por carburo de
tungsteno o compuestos similares que no se encuentran directamente en la natu-
raleza sino que se obtienen por metalurgia de polvos. El carburo de tungsteno fue
fabricado por primera vez a nales del siglo XIX por el francs Henri Moissan, pero
su importancia tecnolgica no fue apreciada hasta dos dcadas despus.
En 1940 se estableci la teora de Ernst y Merchant sobre el corte de los metales
y Palmer y Oxley publicaron Mechanics of the ortogonal machining. En esta poca,
concretamente en 1943, Lazarenko descubri el mecanizado por electroerosin.
Uno de los factores que han inuido considerablemente en el desarrollo de los
procesos de mecanizado ha sido la aparicin de nuevos materiales para herramientas
capaces de elevar la velocidad de corte y trabajar con materiales de propiedades
mecnicas ms exigentes. En 1955 se empezaron a utilizar las primeras herramientas
con recubrimiento cermico. La mayora de mquinas herramienta convencionales
empleadas hoy en da responden al mismo diseo bsico de las versiones antiguas
desarrolladas durante los dos ltimos siglos. El desarrollo del ordenador permiti
la construccin de mquinas herramienta de control numrico y en los aos 50 se
desarrollaron los centros de mecanizado, mquinas herramienta de control numrico
capaces de realizar varias operaciones de corte.
La aparicin de nuevos materiales de mayor dureza y resistencia hace necesario
el empleo de procesos de mecanizado no convencional. Estos procesos comprenden,
entre otros, el mecanizado por electroerosin, mecanizado ultrasnico y corte por
chorro abrasivo, y permiten a su vez la obtencin de geometras complejas para las
cuales no se pueden emplear los procesos de mecanizado convencional tales como el
torneado, taladrado o fresado.
En la actualidad los procesos de mecanizado en general estn siendo sometidos
a un estudio exhaustivo de caractersticas tales como las fuerzas de corte y ma-
teriales para herramienta que permitan mejorar la productividad del proceso sin
perjudicar el acabado de las supercies mecanizadas, determinar la inuencia de
las fuerzas de corte en las vibraciones de las mquinas herramienta y establecer la
relacin existente entre los mecanismos de desgaste de la herramienta y las condi-
ciones de corte, as como disear herramientas que permitan reducir las tolerancias
dimensionales y mejorar las condiciones de mecanizado de materiales de elevadas
propiedades mecnicas y materiales compuestos.
3.2. Introduccin
Los procesos de mecanizado por arranque de viruta estn muy extendidos en la
industria. En estos procesos, el tamao de la pieza original circumscribe la geometra
nal, y el material sobrante es arrancado en forma de virutas. La cantidad de desecho
14 Captulo 3. Introduccin a los procesos de mecanizado
va desde un pequeo porcentaje hasta un 70-90 % de la pieza original.
Comparando este tipo de fabricacin con otros mtodos para conseguir la geo-
metra nal se incluyen ventajas e inconvenientes segn los casos.
Entre las ventajas de este tipo de procesos de mecanizado, que son las razones
por las que su uso est tan extendido, estn:
Se consigue una alta precisin dimensional en sus operaciones
Pueden realizar una amplia variedad de formas
No cambia la microestructura del material por lo que conserva sus propiedades
mecnicas
Se consigue texturas superciales convenientes para los distintos diseos
Son procesos fciles de automatizar siendo muy exibles
Requiere poco tiempo de preparacin
Poca variedad de herramientas
Por otra parte, tambin tiene desventajas respecto a los otros procesos de fabri-
cacin, sobretodo respecto a los de conformado por deformacin plstica y los de
fundicin:
Genera material de desecho en muchos casos no reciclable
Requieren una mayor energa de proceso
Los tiempos de produccin son elevados
El tamao de las piezas est limitado al permitido por la mquina herramienta
Suelen ser poco econmicos cuando el tamao de lote es muy elevado
3.3. Generacin de supercies
El principio de generacin de supercies en este tipo de procesos es el bidimen-
sional, ya que la geometra de la herramienta slo posee informacin de un punto o
elemento de supercie de la geometra nal. Esto tiene como ventaja la exibilidad
para generar mucha variedad de supercies con la misma herramienta. Para gene-
rar la supercie se requieren al menos dos movimientos relativos entre la pieza y la
herramienta.
La geometra de la pieza nal se origina mediante la combinacin de dos ele-
mentos: La geometra de la herramienta, y el patrn de movimientos relativos entre
la pieza y la herramienta. Las mquinas herramienta son las encargadas de generar
esos movimientos relativos aportando la energa necesaria al proceso.
3.4. Formacin de viruta 15
De los dos movimientos relativos mnimos para generar la supercie, suele haber
uno que es el que consume la mayor parte de la potencia de la mquina. Este movi-
miento se le suele denominar movimiento primario o de corte. El otro movimiento
se usa combinado con el movimiento de corte para ayudarle a eliminar el material
sobrante, este movimiento es llamado movimiento de avance.
Estos movimientos pueden ser a su vez lineales o circulares, pueden llevarlos la
herramienta o las piezas indistintamente. Esto hace que haya mucha variedad de
mquinas herramientas para generar las supercies: A modo de ejemplo veamos
cmo se combinan estas variables en las mquinas herramientas ms usuales:
Herramienta Mov. Tipo mov. Portador
Limadora M
c
Lineal Herramienta
M
a
Lineal Pieza
Cepilladora M
c
Lineal Pieza
M
a
Lineal Herramienta
Torno M
c
Circular Pieza
M
a
Lineal Herramienta
Fresadora M
c
Circular Herramienta
M
a
Lineal Pieza
Taladradora M
c
Circular Herramienta
M
a
Lineal Herramienta
3.4. Formacin de viruta
En el estudio de la formacin de viruta se va a suponer que la herramienta es
un diedro que desliza sobre la supercie que est generando. Esta supercie est un
poco por debajo de la supercie de la pieza original, de forma que su movimiento
provoca el desprendimiento de la viruta del material base. La interseccin de los
dos planos del diedro es una recta que es el lo S de la herramienta. Las dos caras
de este diedro son:
Cara de incidencia o anco de la herramienta A
, que es el plano ms cercano
a la supercie generada
Cara de desprendimiento A
que es el plano por el que desliza la viruta
Esta herramienta desliza sobre la supercie con una velocidad v
c
que es la ve-
locidad de corte, se puede denir como la velocidad instantnea del movimiento de
corte respecto la pieza y suele medirse en m/min.
Si esta velocidad es perpendicular al lo, se dice que el corte es ortogonal, en otro
caso se dice que el corte es oblicuo. El corte ortogonal es ms sencillo de estudiar que
el corte oblicuo ya que se presenta un estado de deformacin plana. La supercie
generada por encima de la cual se elimina el material por la cara de desprendimiento
es el plano de lo P
s
y viene denido por el lo S y la velocidad de corte.
Otras deniciones de conceptos importantes son:
16 Captulo 3. Introduccin a los procesos de mecanizado
Avance: Es el movimiento que agregado al de corte conduce a la elimina-
cin progresiva de material. Suele medirse en mm/s, mm/rev, mm/diente,
mm/pasada, . . . .
Espesor de viruta sin deformar a
c
: Es el espesor de la viruta medido perpen-
dicular al lo y en un plano perpendicular al corte.
Espesor de viruta deformado a
o
: Es el espesor de viruta medido despus del
corte.
Relacin de corte r
c
: es el cociente entre el espesor de viruta no deformado y
el espesor de viruta deformado. r
c
=
a
c
a
o
< 1.
Ancho de viruta a
W
: es el ancho de la viruta medido en la direccin del lo.
rea de corte A
c
: es el rea perpendicular la velocidad de corte que es barrida
por la herramienta.
rea de avance A
f
: es el rea perpendicular a la velocidad de avance barrida
por la herramienta.
Tasa de arranque Z
W
: Volumen de material de la pieza arrancado por unidad
de tiempo. Tiene unidades de caudal.
Si se analizan los fenmenos ocurridos en torno al arranque de viruta se obser-
vara que:
La viruta es ms dura y frgil que el material base
a
o
> a
c
por lo que r
c
< 1 siempre
La cara de la viruta que ha estado en contacto con A
es lisa y brillante
mientras que la otra es oscura y rugosa
La viruta cambia de color al desprenderse del material
Se producen grandes incrementos de temperatura en la zona de corte
La forma de la viruta depende de la velocidad del material
El arranque de viruta en materiales dctiles se produce mediante la deformacin
plstica que ocurre en una franja estrecha llamada plano de cizalladura. El material
deformado desliza sobre la cara de desprendimiento venciendo fuerzas de rozamiento
elevadas.
Se distinguen tres tipos bsicos de viruta:
Viruta discontinua: se produce cuando se mecanizan materiales frgiles, y con
materiales dctiles a velocidades muy bajas de corte. El corte se produce a
base de pequeas fracturas del material base.
3.5. Geometra de corte 17
Viruta con protuberancias o corte con recrecimiento de lo: se produce en
materiales muy dctiles, o a velocidades de corte bajas. Cuando la friccin
entre la viruta y la herramienta es muy alta, se produce una adhesin muy
fuerte entre el material de la viruta y la supercie de la herramienta, con lo que
la viruta empieza a deslizar, no directamente sobre la cara de desprendimiento
sino sobre material adherido sobre ella. Este lo recrecido puede llegar a un
tamao en el cual se desprenda el material adherido sobre la pieza o sobre la
viruta dejando en todo caso un acabado supercial muy deciente.
Viruta continua: Es el rgimen normal de corte y es el que mejor acabado
supercial deja.
Hay materiales que pueden presentar los tres regmenes de corte citados depen-
diendo de la velocidad de corte tomada.
3.5. Geometra de corte
Para estudiar la geometra de la herramienta se va a seguir el sistema de la
recomendacin ISO/DIS 3002. Esta norma establece un sistema de planos a partir
de los cuales se van a denir los ngulos de corte.
La norma distingue entre geometra herramienta en mano y geometra herra-
mienta en uso. El primer sistema se usa con nes de fabricacin y alado de herra-
mientas, mientras que el segundo se dene cuando la herramienta est realmente
cortando. Esta es una forma de tener en cuenta los efectos de los grandes avances
y los posicionamientos de las herramientas en las mquinas distintos de los nor-
malizados. Lo nico que puede distinguir un sistema de otro es la direccin de la
velocidad resultante y la direccin de la sujecin en el montaje.
De este modo en un punto del lo O de la herramienta se puede denir un
sistema de ejes cartesianos en el cual el eje OX sea la direccin del la sujecin de
la herramienta (en el caso del torno, la direccin del vstago) y como eje OY como
el de la velocidad de corte. El eje OZ se obtendr de los dos anteriores y suele
coincidir con el el eje Z del sistema de la mquina herramienta. Tanto el eje OX
como el eje OZ son positivos en el sentido en el que la herramienta se aleja de la
pieza. Este sistema de coordenadas es intrnseco a la mquina herramienta que es
la que produce los movimientos relativos entre pieza y herramienta( eje OY ), y la
que sujeta la herramienta (eje OX). Con esta construccin se denen los siguientes
planos herramienta en mano:
Plano de referencia P
r
: es el plano XOZ y es el que fsicamente representa el
plano perpendicular a la velocidad de corte
Plano de trabajo P
f
: contiene al eje OY y el movimiento de avance terico.
(En el cilindrado es el plano Y OZ y en el refrentado Y OX)
18 Captulo 3. Introduccin a los procesos de mecanizado
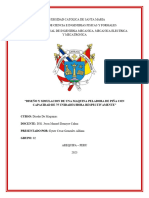
Vstago
Eje de la
herramienta
Flanco principal
Filo principal
Cara
Filo
secundario
Flanco
secundario
Punta de la
herramienta
Figura 3.1: Nomenclatura en una herramienta de torneado
Plano longitudinal P
L
: Es el plano perpendicular a los dos anteriores. En
condiciones normales (la v
c
coincide con el eje OY ) contendra a la velocidad
de corte y sera perpendicular al avance.
Junto a los planos anteriores se denen otros planos que tienen en cuenta la
geometra de la herramienta, llamados planos de situacin:
Plano de lo P
s
: Es el plano que contiene al lo S y a la velocidad de corte
v
c
. Por contener a v
c
este plano es perpendicular a P
r
.
Plano normal P
n
: el plano normal al lo S.
Cara de desprendimiento A
: es la cara de la herramienta por la que desliza
el material situado por encima del plano de lo.
Cara de incidencia A
: es la cara de la herramienta ms cercana al plano del
lo.
Los tres ltimos planos son intrnsecos a la geometra de la herramienta y son
independientes de su posicin en la mquina herramienta.
Con este sistema de planos ya se pueden denir los ngulos de corte. Estos se
representan con una letra griega y un subndice que indica el plano sobre el cual se
miden.
En el plano normal P
n
se denen los siguientes ngulos:
ngulo de desprendimiento
n
: es el que forman A
y P
r
ngulo de incidencia
n
: es el que forma A
y P
s
3.5. Geometra de corte 19
X
Z
Y
O
P
r
P
f
P
l
Figura 3.2: Denicin de planos en una herramienta de torneado
b
n
g
n
a
n
k
r
k
r
l
s
P
s
P
s
P
n
P
n
P
f
P
r
P
r
A
g
A
a
Figura 3.3: Geometra en una operacin de cilindrado
20 Captulo 3. Introduccin a los procesos de mecanizado
l
s
P
f
P
r
P
r
S
v
Figura 3.4: Geometra en una operacin de fresado frontal
ngulo de lo
n
: es el que forma A
y A
y es complementario a los dos
anteriores
En el Plano de referencia P
r
se mide el ngulo de posicin de lo principal
r
que es el ngulo que hay entre P
s
y P
f
, medido sobre el P
r
.
En el Plano de lo P
s
se dene el ngulo de inclinacin de lo
s
que es el
formado entre S y P
r
. Si
s
= 0 el corte es ortogonal.
Cuando la herramienta termina en punta, suelen intervenir dos los en el corte.
El principal, que es el que mayor parte de carga lleva, y el secundario. Las magni-
tudes referidas al lo secundario se denominan colocando un smbolo
despus del
smbolo. As se denomina
r
, . . .
Esta geometra puede cambiar en las condiciones de uso debido a la inuencia
de los avances o la desviacin en el posicionamiento de la herramienta. En este
caso se denen las mismas magnitudes aadiendo el subndice e a las magnitudes
denidas anteriormente:
ne
,
re
,
se
, etc. La traslacin de un sistema a otro se
realiza mediante clculos geomtricos, a partir del nuevo posicionamiento del eje
OY
en lnea con la velocidad.
3.6. Fuerzas de corte 21
3.5.1. Inuencia de los ngulos de corte en el funcionamiento
Si el ngulo de desprendimiento
ne
es grande las fuerzas de corte disminuyen
pues el material se deforma menos plsticamente y la herramienta se desgasta mucho
en la cara de desprendimiento al aumentar la fuerza de friccin, y la velocidad
relativa de la viruta sobre la cara de la herramienta.
Si el ngulo de incidencia
ne
es grande la herramienta puede fracturar su punta
debido a las altas fuerzas de corte, pero cuanto ms pequeo sea mayor desgaste
sufrir la punta aumentando las prdidas por rozamiento de la herramienta con la
supercie de la pieza.
El ngulo de inclinacin de lo
se
inuye en la direccin de la viruta en su
salida por la cara de desprendimiento. Toma valores positivos cuando echa la viruta
fuera de la pieza. Y toma valores negativos cuando tiende a hacer chocar la viruta
de nuevo con la pieza. Cuando se mecanizan materiales duros y frgiles se usan
se
< 0.
Un ngulo de posicin de lo
re
distinto de 90
permite un mejor aprovecha-
miento de la longitud de lo sobre todo cuando se tiene limitada la profundidad de
pasada. Tambin se usa para evitar fuerzas de impacto al inicio del corte, suavizando
la entrada de la herramienta en el corte.
3.6. Fuerzas de corte
Aunque el coste de la potencia consumida en una operacin de mecanizado no es
un factor econmico importante habitualmente, es necesario su conocimiento para
ser capaces de estimar la cantidad de potencia necesaria para realizar la operacin
debido a las limitaciones impuestas por la mquina disponible. La capacidad de
estimar la potencia de una operacin es importante sobretodo en las operaciones
de desbaste ya que lo que interesa es realizar la operacin en el menor tiempo y en
el menor nmero de pasadas posible. Por otra parte, las fuerzas de corte tambin
intervienen en fenmenos como el calentamiento de la pieza y la herramienta, el
desgaste de la herramienta, la calidad supercial y dimensional de la pieza, el diseo
del amarre y utillajes necesarios, etc.
La interaccin entre la herramienta, la viruta y la pieza, se traduce en una
serie de presiones sobre la supercie de la herramienta. Este sistema de fuerzas y
presiones se puede reducir a una fuerza resultante F. El momento resultante se
puede despreciar ya que el rea sobre el que se aplica la fuerza es muy pequea.
Una primera descomposicin de esta fuerza es en dos direcciones ortogonales, una
en la direccin de la velocidad de corte que ser la fuerza de corte F
c
, y la otra en
la direccin perpendicular a la velocidad de corte que ser la fuerza de empuje F
t
.
De las dos fuerzas, la nica que consume potencia es F
c
, siendo la funcin de F
t
la
de mantener la posicin del lo de la herramienta en el plano el lo P
s
.
22 Captulo 3. Introduccin a los procesos de mecanizado
3.6.1. Energa especca de corte
Se dene la energa especca de corte p
s
como la energa necesaria para remo-
ver una unidad de volumen de material. Este valor relaciona la potencia P
m
y la
velocidad de arranque de material Z
w
.
p
s
=
E
m
V
=
E
m
/t
V/t
=
P
m
Z
w
(3.1)
Si se tiene el valor de p
s
junto con el valor de la potencia disponible en la
mquina, se puede calcular la tasa de arranque mxima de la operacin, o sea, el
volumen mximo de material que se puede arrancar por unidad de tiempo. Esta tasa
de arranque tiene unidades de caudal, y se puede calcular integrando el producto
escalar del rea de barrido por la velocidad de barrido. De modo simplicado se
puede usar el rea de corte o el rea de avance para su clculo. Siendo el rea de
corte A
c
el rea barrida por la herramienta perpendicular a la velocidad de corte, y
el rea de avance A
f
el rea barrida por la herramienta perpendicular a la velocidad
de avance.
Z
w
= A
c
v
c
= A
f
v
f
(3.2)
Por lo tanto, el valor de p
s
tambin relaciona la fuerza de corte F
c
y el rea de
corte A
c
, por lo que tambin se le suele llamar fuerza especca de corte K
s
.
p
s
=
P
m
Z
w
=
F
c
v
A
c
v
=
F
c
A
c
(3.3)
Los experimentos pueden decir cmo vara p
s
con las condiciones de corte. En
concreto, se va a estudiar el efecto de la velocidad de corte y del espesor de viruta
sobre el valor de p
s
.
A velocidades bajas, la energa especca de corte es muy alta, disminuyendo
conforme aumenta la velocidad hasta un valor a partir del cual p
s
permanece cons-
tante. Esto se debe al recrecimiento de lo que aparece a bajas velocidades de corte
y cuando la friccin es alta. Normalmente se debe trabajar en el tramo en el que p
s
es constante ya que tambin es la ms econmica.
p
s
disminuye al aumentar a
c
, muchos fabricantes de herramientas proporcionan
una expresin de esta variacin. El aumento de p
s
al disminuir a
c
se debe al efecto
de tamao, ya que las fuerzas de friccin en la cara de incidencia y aplastamiento
de la punta redondeada representan un porcentaje mayor en la energa consumida
al disminuir a
c
.
3.6.2. Fuerzas de friccin
La friccin en las operaciones de mecanizado tiene ciertas peculiaridades que ha-
cen que sus leyes sean distintas de las que siguen los fenmenos de friccin normales.
Para ello se van a distinguir tres tipos de deslizamiento entre supercies metlicas:
3.6. Fuerzas de corte 23
Contacto dbil.
Las supercies metlicas en estado normal tienen una capa de xido que re-
cubre los tomos metlicos, esta capa tiene la funcin de proteger el metal de
posteriores oxidaciones. La tensin de cizallamiento entre capas de xido es
muy bajo, con lo que si adems la presin normal es pequea, el bajo valor
del rea de contacto real har que el el coeciente de rozamiento del orden de
= 0,1 para los aceros.
Contacto con microsoldaduras.
Cuando entre dos supercies metlicas rugosas, la presin normal es algo
elevada, la capa pasiva de las puntas de las asperezas en contacto es eliminada,
entrando en contacto directo los dos metales sin ningn xido que los separe.
Al entrar en contacto los tomos de una y otra supercie, se forma una unin
metlica interatmica, hay coalescencia entre los dos materiales. Al n y al
cabo la soldadura ocurre entre las dos supercies a nivel microscpico. Las
supercies soldadas son la de los picos de las asperezas, que suman el rea
real de contacto A
r
, que es menor que el rea aparente de contacto A
a
que
se observa macroscpicamente. Para conseguir deslizar una supercie sobre la
otra se han de cizallar las micro soldaduras las cuales tienen una tensin de
resistencia a la cizalladura de
sl
, de forma que la fuerza de rozamiento total
ser:
F
R
=
i
A
i
sl
= A
r
sl
(3.4)
Por otra parte se sabe que en supercies con distribuciones alturas de aspe-
rezas gaussiana y para cargas ligeras, A
r
es proporcional a la presin normal
aplicada, que en un rea determinada ser la fuerza normal F
N
, con lo que:
A
r
= C F
N
(3.5)
F
R
=
sl
A
r
=
sl
C F
N
= F
N
(3.6)
con lo que se cumple la ley de la friccin de Coulomb de proporcionalidad
entre F
R
y F
N
, siendo el coeciente de rozamiento.
Contacto pleno.
Cuando las fuerzas de contacto son muy elevadas la proporcionalidad empieza
a fallar hasta que el contacto entre las supercies llega a ser pleno, es decir,
A
r
= A
a
, con lo que la fuerza de friccin tambin llega a ser constante F
R
=
A
a
sl
, e independiente de la fuerza o presin normal aplicada.
24 Captulo 3. Introduccin a los procesos de mecanizado
En el deslizamiento de la viruta sobre la cara de desprendimiento, las supercies
estn libres de capas de xidos, ya que la de la viruta est recin creada y no ha
tenido contacto con el aire ni con nada sino con la cara de la herramienta, y la cara
de desprendimiento ha estado rozando anteriormente con viruta ya desprendida
que a los primeros metros ha dejado desnuda a la herramienta de cualquier capa de
xido.
Por otra parte las presiones normales son elevadsimas, por encima de la tensin
de uencia de la pieza, por lo que el contacto entre supercies ser pleno.
Esto explica lo observado en los experimentos:
La fuerza de rozamiento es independiente de
ne
Al aumentar
ne
disminuye la fuerza de corte pero no la fuerza de rozamiento.
Por otro lado, aumenta la velocidad de deslizamiento de la viruta sobre la
herramienta aumentando de manera considerable el calentamiento y desgaste
de la herramienta.
La fuerza de rozamiento es menor cuanto ms disimilares sean los materiales
de la herramienta y de la pieza. De donde viene la importancia de recubrir
bien los materiales de herramienta, con capas cermicas.
3.7. Temperaturas de corte
Una de la limitaciones de los procesos de corte son las temperaturas alcanzadas
durante el mecanizado. La potencia consumida en el corte se invierte en la deforma-
cin plstica de la viruta y en los distintos rozamientos. Estos trabajos se convierten
en calor que se invierte en aumentar las temperaturas de la viruta, la herramien-
ta y la pieza de trabajo. La herramienta pierde resistencia conforme aumenta su
temperatura, aumentando su desgaste y por lo tanto disminuyendo su vida til.
Por otro lado, un calentamiento excesivo de la pieza de trabajo puede variar las
propiedades del material debido a cambios microestructurales por efectos trmicos,
tambin puede afectar a la precisin del mecanizado al estar mecanizando una pieza
dilatada que a temperatura ambiente se puede contraer.
Aunque no se va a estudiar a fondo el fenmeno termodinmico, s que conviene
tener algunos conceptos claros respecto a la inuencia de los distintos parmetros
de corte en las temperaturas de la herramienta y en la pieza y, por los tanto, en la
economa y calidad del proceso.
Generacin de calor
La potencia consumida en una operacin de corte P
m
se convierte en calor
principalmente por los siguientes mecanismos:
Deformacin plstica en la zona de cizalladura de la viruta. El calor genera-
do por unidad de tiempo tiene un valor se puede calcular en funcin de la
velocidad de cizallado y la fuerza de cizallado: P
s
= F
s
v
s
.
3.8. Desgaste de herramientas 25
Friccin entre la viruta y la herramienta. El ujo de calor generado ser P
f
=
F
r
v
o
Friccin entre la herramienta y la pieza. Su valor, al igual que los anteriores
ser el producto de la fuerza de rozamiento por la velocidad relativa entre la
herramienta y la pieza: P
fw
=
sl
V B a
w
v. Esta fuente de calor depender
del desgaste V B que ser nulo cuando la herramienta est recin alada.
3.8. Desgaste de herramientas
Desgaste es la prdida de material por friccin que hace cambiar la geometra
de la herramienta hasta llegar a inutilizarla.
Los mecanismos de desgaste en las operaciones de corte son principalmente tres:
Adhesin: Debido a las microsoldaduras, los tomos de la supercie de la
herramienta son arrastrados por la viruta.
Abrasin: La pieza de trabajo contiene inclusiones de partculas muy duras
que rayan la supercie de la herramienta.
Difusin: A temperaturas elevadas, los tomos de aleacin se difunden hacia
donde existe menos concentracin. Por este mecanismo la supercie de la
herramienta se empobrece de elementos de aleacin debilitndose.
Estos mecanismos se agravan cuando aumenta la temperatura, y cuando los
materiales son ms anes.
El desgaste en la herramienta de corte es de dos tipos principalmente:
En la cara de desprendimiento se produce un crter, normalmente en el punto
donde la temperatura alcanza su mximo.
En la cara de incidencia se produce un achaanamiento de la punta debido al
rozamiento de la herramienta con la supercie mecanizada.
El desgaste por craterizacin se caracteriza por los parmetros KT, KM, y KB.
Mientras que el desgaste en la cara de incidencia se caracteriza por V B, y por NB.
Para estimar la gravedad del desgaste se suele utilizar V B y KT. Un valor
excesivo de V B produce inestabilidades en el contacto con vibraciones adems de
aumentar las prdidas por friccin en la cara de incidencia. Un valor excesivo de
KT aumentara el riesgo de fractura de la punta de la herramienta.
La norma ISO TC29 establece unos valores mximos de V B KT como criterio
de vida de la herramienta, para cada tipo de material de herramienta. Entre las
distintas especicaciones destaca la limitacin de V B a un valor de 0.3 mm de valor
medio a lo largo del lo, o a un valor mximo de 0.6 mm.
El valor V B sigue una evolucin lineal con el tiempo, pero la pendiente de esa
recta depende de la velocidad. Existe para una herramienta una relacin entre el
26 Captulo 3. Introduccin a los procesos de mecanizado
la velocidad de corte y el tempo en que V B tarda en alcanzar el valor de 0.3 mm
(llamado vida de herramienta t). Esta relacin se aproxima mucho a la llamada ley
de Taylor la cual establece que vt
n
= C. C y n son obtenidos experimentalmente
y dependen del material de la herramienta y de la pieza a mecanizar, geometra de
corte, refrigeracin, . . . .
La vida de la herramienta segn KT depende de
ne
. Debido a que a partir
de un valor de
ne
el desgaste puede ser catastrco, por lo
n
est limitado para
lo distintos tipos de materiales. Para los metales duros su valor suele es de 3.5,
para los aceros rpidos su valor est comprendido entre 0 y 14 cuando mecaniza
materiales duros, y entre 14 y 30 cuando mecaniza materiales dctiles.
3.9. Fluidos de corte
Los uidos de corte tienen dos funciones:
Refrigeracin: Para disminuir las temperaturas de corte permitiendo trabajar
a mayor velocidad, evitando los inconvenientes del incremento de temperatura
que lleva consigo.
Lubricacin: Interponindose entre la viruta y la herramienta para disminuir
las fuerzas de friccin y evitar el recrecimiento de lo
Debido a que al principio se utilizaba en operaciones de taladrado donde hay
partes del lo que tienen una velocidad muy baja y por lo tanto susceptible de
formar lo recrecido, a los uidos de corte se les suele denominar taladrinas.
El mecanismo en el que el uido se interpone entre la viruta y la herramienta es
el de capilaridad, por lo que la taladrina debe tener muy baja tensin supercial, y
requiere pesos moleculares muy bajos.
La accin del lubricante es esencialmente qumica, la taladrina contiene reacti-
vos que se adhieren a la supercie que lubrican disminuyendo la adhesin viruta-
herramienta y facilitando el deslizamiento. En lugar de usar reactivos en base a S
o P se suelen utilizar compuestos clorados (tetracloruro de carbono CCl
4
, cloro-
formo CHCl
3
, tricloroetano CH
3
Cl
3
, . . . ), pues aguantan mucho mejor las altas
temperaturas que se producen en el torno.
Un inconveniente importante de las taladrinas es su toxicidad, lo que hace que
est sometido a reglamentos medioambientales muy estrictos.
La aplicacin principal de las taladrinas es como refrigerante, sobretodo ahora
en las mquinas automticas donde se puede inyectar el uido a alta presin en
la zona de contacto sin las limitaciones de no ver directamente el corte o de las
salpicaduras.
3.10. Materiales de herramienta
Ya se ha visto la importancia de las caractersticas del material de herramienta
para establecer los parmetros de corte ptimos. En concreto, al material de he-
3.11. Maquinabilidad de materiales 27
rramienta se le va a pedir que tenga buenas propiedades a alta temperatura, de
desgaste, resistencia, dureza y tenacidad. Adems ha de tener poca anidad qu-
mica con la pieza de trabajo, y debe se resistente a la corrosin. Para conseguir
una combinacin ptima de propiedades, se ha de llegar a un compromiso entre
resistencia al desgaste y la tenacidad.
Los materiales de herramienta son variadsimos, y estn en continua evolucin.
Aqu se van a clasicar en tres grandes grupos: Aceros rpidos (HSS), Metales duros
(C), y Cermicos (CC). El orden de citacin ha sido el de resistencia al desgaste
creciente, pero tenacidad decreciente.
Los aceros rpidos son aleaciones de Fe, se producen por fundicin y trata-
miento trmico. Se usan para herramientas monobloque y para corte interrumpido.
Trabajan hasta temperaturas de 600 C.
Los metales duros son carburos cementados en una matriz de cobalto, Se produ-
cen por procedimientos pulvimetalrgicos, se proporcionan en forma de plaquitas,
ajustables a barras portaherramientas. Pueden trabajar hasta temperaturas de 1200
C.
La norma ISO/TC29 ha clasicado estos materiales en tres grupos P (para
mecanizar materiales dctiles), M (para mecanizar materiales abrasivos), y K (para
mecanizar materiales frgiles). Y los numera segn la calidad que viene dada por
su resistencia al desgaste de 01 a 50. Cuanto mayor es el nmero menor resistencia
al desgaste tendr.
Dentro del grupo de los materiales cermicos se encuentran los cermets, el Ni-
truro de Boro Cbico (CBN), el diamante policristalino, . . . . Tiene la ventaja de
que aguantan muy altas temperaturas (hasta 2000 C), tienen poca anidad con los
metales, y son muy duros. Tienen el inconveniente de ser muy frgiles, tienen baja
conductividad trmica, por lo que se calientan antes.
3.11. Maquinabilidad de materiales
El criterio para establecer que un material es ms maquinable que otro puede
obedecer a distintos criterios: la potencia requerida, la forma de la viruta, el acabado
supercial, . . . . Sin embargo, el ms usado es el de desgaste de la herramienta: un
material es maquinable cuando desgasta poco la herramienta.
Los aceros se suelen alear con S, Pb, Te, . . . . A alta temperatura, forman inclu-
siones que lubrican la supercie entre la viruta y la herramienta.
Muchas aleaciones (aceros inoxidables, Aluminios aleados, . . . ) tienen microes-
tructuras con fases abrasivas que desgastan la herramienta.
3.12. Rugosidad supercial
Segn la informacin de la geometra de la herramienta y el patrn de movimien-
tos se puede conocer la rugosidad supercial ideal. Sin embargo, debido a efectos
28 Captulo 3. Introduccin a los procesos de mecanizado
microestructurales, recrecimiento de lo, . . . , la rugosidad supercial natural es ma-
yor que la ideal, aproximndose a sta conforme la velocidad aumenta. La rugosidad
natural puede tambin variar por diversas irregularidades en el corte.
Se va estudiar la rugosidad supercial dejada en la pieza segn sea la huella de
tipo angular, o de tipo circular.
3.13. Problemas de mecanizado
1. Una herramienta de torno con punta angular, donde
r
= 60
y f = 0,05
mm/rev. Cul debe ser el ngulo de lo secundario para obtener una rugosi-
dad media R
a
= 3 m bajo condiciones ideales?
R:
r
= 15,57
2. En una operacin de torneado de un cilindro 70 300 mm el avance es de
0.25 mm/rev y la velocidad de corte de 1 m/s. La fuerza de corte est limitada
a 3 kN y la energa especca de corte del material es de 2000 MPa. Calcular:
a) El tiempo de realizacin de la operacin.
b) La profundidad mxima de pasada.
R: 263.9 s; 6 mm
3. En una operacin de taladrado con una broca de dos los, la velocidad angular
n
t
= 300 r.p.m., el avance es f = 0,2 mm/rev, el ngulo de lo principal
r
= 60
, el dimetro de la broca es d
t
= 12 mm. Si la energa especca de
corte del material que est cortando es p
s
= 3000 MPa.
Calcular:
a) La tasa de arranque.
b) El espesor de viruta no deformado.
c) El par motor de la taladradora.
R: 113.1 mm
3
/s; 0.087 mm; 10.8 Nm
4. En una operacin de cilindrado la vida de la herramienta obedece a la siguiente
ecuacin de Taylor t = v
0,3
f
0,8
a
0,1
p
estando v, f, y a
p
en unidades S.I.
Estimar el efecto en% sobre la vida de la herramienta, al duplicar la tasa de
arranque incrementando:
a) La velocidad.
b) El avance.
c) La profundidad de corte.
3.13. Problemas de mecanizado 29
R: 87 %; 43 %; 7 %
5. En una operacin de torneado, se reduce el dimetro de un cilindro 40 70
a 35 mm. Primero mediante una pasada de desbaste hasta un dimetro de
36 mm y despus mediante una pasada de acabado hasta el dimetro nal.
La herramienta tiene un radio de punta de 2 mm y el ngulo de posicin de
lo es
r
= 75
. La mquina tiene una potencia mxima de 5 kW. La energa
especca de corte viene dada en funcin del espesor de viruta mediante la
siguiente expresin:
p
s
= 3000
_
0,4
a
c
_
0,29
viniendo a
cmax
en mm, y p
s
en MPa
Determinar:
a) El avance mximo en la pasada de desbaste si la velocidad de corte es de
70 m/min.
b) El avance mximo en la pasada de acabado si la rugosidad supercial a
conseguir es de R
a
=5 m.
6. Un redondo de 80 mm de dimetro se rebaja a en una pasada a 75 mm de
dimetro a lo largo de una longitud de 150 mm. La energa especca de corte
del material de trabajo es de 2000 MPa. El avance es de 0.25 mm/rev y la
velocidad angular del husillo es de 300 rpm. Calcular:
a) El tiempo de realizacin de la operacin
b) El par motor y la potencia necesaria para realizar dicha operacin.
7. En una operacin de escuadrado con fresa perifrica (Figura 8.1), segn el
dibujo de la gura con a
p
= 30 mm y a
e
= 5 mm, la pieza tiene una longitud
de 50 mm y una energa especca de corte p
s
= 2000 MPa. La fresadora
tiene 10 dientes y un dimetro de 50 mm. Determinar el avance en mm/rev
para que la rugosidad supercial sea R
t
= 0,2 m. Calcular en este caso el
espesor mximo de viruta.
R: 2 mm/rev; 0.12 mm
8. Con los datos del problema anterior y sabiendo que la potencia mxima de la
mquina es de 3 kW y la velocidad de la fresa es de 100 r.p.m. Determinar el
avance mximo en mm/rev y el tiempo de mecanizado.
30 Captulo 3. Introduccin a los procesos de mecanizado
a
e
a
p
Figura 3.5: Fresado perifrico
R: 6 mm/rev; 6.5 s
9. En un fresado perifrico la fresa tiene 20 dientes y su dimetro es de 200 mm.
La velocidad de rotacin es de 5 rev/s, el avance 1.3 mm/s, la penetracin 6
mm, y el ancho de la pieza de 50 mm. La relacin entre el espesor mxtmo de
viruta no deformado a
cmax
y la energa especca de corte viene dado por:
p
s
= 1,4
_
1 +
0,5 10
6
a
cmax
_
(3.7)
viniendo a
cmax
en m, y p
s
en GJ/m
3
.
Estimar:
a) La tasa mxima de arranque.
b) La potencia mnima en kW requerida por la operacin
10. En una operacin de fresado perifrico, se establecen las siguientes condiciones:
velocidad de rotacin es de 2.8 rev/s, el avance 2 mm/s, la penetracin 10 mm,
el ancho de la pieza de 50 mm, la longitud de la pieza 150 mm, el dimetro
de la fresa 40 mm, n
o
de dientes de la fresa 10. La relacin entre el espesor
mximo de viruta no deformado a
cmax
y la energa especca de corte viene
dada por:
3.13. Problemas de mecanizado 31
p
s
= 3000
_
0,4
a
cmed
_
0,29
(3.8)
viniendo a
cmed
en mm, y p
s
en MPa
Estimar:
a) La potencia requerida por la mquina si tiene una rendimiento del 80 %
b) Tiempo de mecanizado
11. En una operacin de fresado perifrico, la pieza de trabajo tiene un ancho de
75 mm y una longitud de 200 mm, y se ha de rebajar su espesor 5 mm en una
pasada. La fresa tiene 50 mm de dimetro y 3 dientes, la potencia nominal de
la fresadora es de 3 kW y la energa especca de corte es de 3.6 GJ/m
3
.
Determinar:
a) La mxima velocidad de avance.
b) La velocidad angular de la rueda para que la rugosidad supercial terica
R
t
sea inferior a 1.5 m.
c) El tiempo de mecanizado de la pieza.
12. En una operacin de fresado frontal, la profundidad de corte es 5 mm la
velocidad de avance 0.67 mm/s, el ancho de la pieza 50 mm, y la fresa tiene
20 dientes con un dimetro de 800 mm. La velocidad de corte es de 1 m/s.
Calcular:
a) Velocidad angular de la fresa
b) Tasa de arranque mxima
c) tiempo necesario para mecanizar 100 piezas de longitud 150 mm si el
tiempo de carga y descarga es de 180 s.
32 Captulo 3. Introduccin a los procesos de mecanizado
Captulo 4
Planicacin de la fabricacin
4.1. Introduccin
La produccin de una pieza o componente debe seguir unos criterios relacionados
con la calidad, tanto en el cumplimiento de las especicaciones de la pieza como en
la calidad del servicio al realizarla en el plazo estimado, y el coste nal.
Normalmente la fabricacin se lleva a cabo en un entorno especco: una fbrica,
unas mquinas, unos operarios, los plazos de entrega, las auditoras, suministros,
etc. Adems no suele fabricarse una pieza slo sino muchas u lo sucientemente va-
riadas, aunque las fbricas se estn especializando en piezas semejantes agrupadas
en familias. Para satisfacer los objetivos de calidad precio y plazo, se han de opti-
mizar y ordenar las mltiples acciones que se deben llevar a cabo. Esta ordenacin
o planicacin se establece en cinco niveles distintos:
1. Planicacin de la produccin. En esta etapa se realiza un listado de
productos a fabricar, el plazo en el que hay que suministrarlos, y en qu
cantidades.
2. Planicacin de pedidos. En esta etapa se realiza la hoja de balance en el
que se planican las actividades para cumplir con el plan de produccin. En
concreto, se planican los componentes cuya fabricacin se subcontrata, los
suministros necesarios (MRP), los accesorios y la mano de obra.
3. Planicacin de capacidad. En esta parte se establecen los horarios y se-
cuencias de tareas, para cumplir con las fechas de entrega, se establece el capi-
tal necesario para mantener la produccin, la reduccin de tiempos muertos y
perezosos de las mquinas, as como tener previsto las soluciones a problemas
que pudieran aparecer.
33
34 Captulo 4. Planicacin de la fabricacin
4. Planicacin de procesos. Para cada componente en particular se seleccio-
nan y se denen al detalle las preformas y los procesos a realizar para la su
transformacin en productos nales listos para el montaje. En esta parte se
denen procesos factibles y se determinan los tiempos y plazos de fabricacin.
5. Planicacin de operaciones. En esta parte se dene la documentacin a
partir de los datos dados en la planicacin de procesos. Se suelen usar:
La Hoja de Ruta. Es el documento que acompaa al lote de fabrica-
cin y donde se sealan los tiempos, los controles de calidad y todas las
incidencias que hayan podido ocurrir.
La Ficha de Operacin. Por cada operacin se realiza una cha con todos
los detalles de sta. Suele recibir otros nombres en las fbricas como
Gamas, o Instruccin de Control de Calidad de Procedimientos (ICCP).
4.2. Partes de la planicacin de procesos
4.3. Estudio de la informacin geomtrica del plano
Antes de realizar operacin alguna, se debe determinar la fabricabilidad de la
pieza, ya que en el contrato el fabricante se compromete a asegurar el cumplimiento
de las especicaciones del plano.
En primer lugar se deben contrastar la validez de los procesos disponibles estu-
diando las cotas crticas y decidiendo los puntos de amarre para conseguirlas.
Se han de tener en cuenta si se tienen que realizar operaciones intermedias como
tratamientos trmicos, si se han de disear amarres especiales, etc.
Por ltimo y como cosa importante se han de prever los instrumentos de control
necesarios para el control de calidad antes de dar salida al producto.
Para realizar bien este estudio previo a la fabricacin se va describir una meto-
dologa que conviene utilizar sobretodo para los planicadores noveles. Los pasos a
seguir son:
Numeracin de las supercies a mecanizar
Anlisis de las especicaciones de las supercies
Anlisis de la preforma necesaria.
Anlisis del resto de las especicaciones.
4.3.1. Numeracin de supercies
En el plano se numeran todas las supercies que tienen especicaciones propias.
Es decir, las que tienen algo caracterstico que la distingue de las dems. En esta
etapa ms vale pasarse de ms que de menos.
4.3. Estudio de la informacin geomtrica del plano 35
4.3.2. Anlisis de las especicaciones de las supercies
Las supercies vendrn caracterizadas por distintos parmetros que sealan ca-
ractersticas de:
Acabado supercial. Habitualmente se sealan sus caractersticas de Rugosi-
dad media R
a
y textura.
Tolerancias dimensionales. Valores mximos y mnimos sealadas habitual-
mente en las cotas. Estas tolerancias pueden estar indenidas por que esa
supercie no es funcional, pueden ser unilmites, o pueden estar perfectamen-
te denidas sealando su mximo y su mnimo. Estas cotas dimensionales
tambin se pueden clasicar en:
Intrnsecas a las supercies
De posicin relativa entre supercies mecanizadas
De posicin relativas entre supercies en bruto y mecanizadas
Tolerancias geomtricas. Son tolerancias de forma y posicin las cuales condi-
cionan la mquina utilizada, el amarre, la secuencia de operaciones, las con-
diciones de corte, . . . .
Ayuda a realizar este estudio la realizacin de una tabla resumen en la que
se observe que todas las supercies estn determinadas, as como ver de forma
ordenada las supercies con tolerancias ms crticas.
4.3.3. Anlisis de la preforma
Para elegir la preforma a partir de la cual se va a fabricar la pieza, se debe elegir:
Tipo de material: Del cual se deben tener datos sobre su maquinablilidad,
sus tratamientos trmicos su los necesitara, as como la capacidad de soportar
aprietos por parte de los amarres.
Forma y dimensiones: Se han de tener en cuenta su deformabilidad, mediante
el Mdulo de Young E, la dicultad del amarre, el acceso de las herramientas
a todas las supercies a mecanizar, as como el comportamiento vibracional
del conjunto herramienta-pieza durante el mecanizado.
La preforma tiene unas dimensiones mayores que las del slido que circumscribe
a la pieza a fabricar. Ese sobredimensionamiento se denomina creces. Dependiendo
de la procedencia de la preforma se recomiendan unas creces u otras segn se seala
en la Tabla 2.
En la misma tabla se puede observar la posibilidad de obtener tolerancias sin
mecanizar.
Para la eleccin del bruto se tendr en cuenta la disponibilidad comercial, as
como el tamao del lote que se fabrica.
36 Captulo 4. Planicacin de la fabricacin
4.4. Determinacin de los volmenes de mecaniza-
do. Asociacin de supercies
A partir de la geometra de la preforma, se sealan los volmenes que sobran
para conseguir la pieza nal. Estos volmenes se numeran y se relacionan con las
posibles operaciones de mecanizado capaces de arrancarlo.
Para conocer cuales de estas operaciones son capaces de conseguir las especica-
ciones de las supercies, se realiza la asociacin de las supercies a dichos volmenes.
Algunos volmenes tendrn varias supercies asociadas por lo que se puede estu-
diar si se puede realizar el mecanizado simultneo de dichas supercies, ahorrando
operaciones.
En esta etapa no se tienen en cuenta tolerancias y se trata simplemente de ver
posibilidades y planes alternativos.
Esta asociacin de supercies se puede realizar de forma grca como se muestra
en la gura. Algunos volmenes se pueden mecanizar por una u otra operacin segn
la secuencia elegida.
4.5. Determinacin de procesos y secuencia de me-
canizado
En esta etapa de la planicacin se intenta determinar todas las operaciones
necesarias y ordenarlas.
En el siguiente esquema se indican los factores y las consideraciones que pueden
entrar en juego a la hora de seleccionar las operaciones y seleccionar su orden.
Factores tecnolgicos de las mquinas
Tipos de supercies realizables
Asociacin de supercies (n de herramientas, trayectorias)
Dispersin de posicionado de los cursos
Capacidades y condiciones de corte posibles
Calidades superciales
Factores tecnolgicos de las herramientas
Operaciones de desbaste y acabado
Material a mecanizar y desgaste de la herramienta
Condiciones de corte y trayectorias posibles
Calidad supercial obtenible
Factores tecnolgicos de los utillajes
Amarre y posicionado de piezas
4.5. Determinacin de procesos y secuencia de mecanizado 37
Amarre y posicionado de herramientas
Facilidad y seguridad de uso
Factores econmicos: Valor hora mquina, tamao de lote, frecuencia de lan-
zamiento, Plazo de entrega, . . .
Factores fsicos: Peso de la pieza, material, deformabilidad
Factores geomtricos: Creces del material, exigencias de supercie, Precisin
dimensional y geomtrica
La rugosidad supercial determina por ejemplo si es necesario dar una pasada de
acabado para conseguir la calidad supercial especicada. Para ello existen tablas
y grcas que ayudan a discernir en funcin de la mquina que se use.
Despus de determinar todas las operaciones necesarias para realizar la pieza, se
ordenan de forma que hayan el menor nmero de Fases posibles y el menor nmero
de subfases posibles. Siendo una fase el trabajo realizado en una mquina, y la
subfase el trabajo realizado en una mquina y en un amarre. Las operaciones son
las partes elementales.
Siempre se han de cumplir las relaciones de precedencia, para que la pieza sea
fabricable. Estas relaciones de precedencia vienen impuesta por razones como:
No se puede realizar una operacin de acabado si antes no se ha realizado el
desbaste
Hay volmenes que para mecanizarlos se requiere que se hayan mecanizado
otros por accesibilidad de las herramientas
. . .
Para determinar el orden de subfases se han de determinar las supercies de
referencia, a partir de la tabla resumen de estudio de las supercies. Una supercie
de referencia es aquella a la que estn referidas la posicin y forma de otras super-
cies. Estas supercies tienen un papel importante en el amarre a partir del cual se
mecanizan las supercies a ellas referidas.
Se han de cuanticar las operaciones que se pueden realizar en el mismo amarre.
Las operaciones tambin se ordenan de forma que se mecanizan primero:
Las supercies de referencia, en donde se va a apoyar la pieza en los sucesivos
amarres.
Las supercies con tolerancias dimensionales ms estrechas, ya que son el
origen de la mayor parte de los rechazos, y stos es preferible que ocurran
antes.
Las tolerancias de forma suelen ser ms fciles de conseguir que las dimensio-
nales, con lo que se mecanizarn despus.
Para la realizacin de esta etapa tambin se puede recurrir a procedimientos
grcos.
38 Captulo 4. Planicacin de la fabricacin
4.6. Seleccin de supercies de referencia y sujecin
El montaje de la pieza en la mquina debe ser precisa, estable, reduciendo al
mximo la incertidumbre en su posicionamiento.
Para la sujecin de la pieza y de la herramienta se sigue el principio de isosta-
ticidad, con el n de que no haya desplazamientos incontrolados. Esto signica que
a la pieza se le restringen los seis grados de libertad (3 traslaciones, y 3 rotaciones)
De este modo al amarrar una pieza prismtica en una fresadora se tiene:
3 apoyos no alineados denen un plano (A, sujecin)
2 apoyos determinan la lnea (B, alineacin)
1 apoyo materializa un punto (C, tope)
En una pieza de revolucin corta (L/D < 3) se denen:
3 apoyos denen el plano (A)
2 apoyos sobre la cara (B, centrado)
1 apoyo sobre la cara (C, posicionamiento)
Y cuando la pieza de revolucin se larga (L/D > 3):
4 apoyos sobre la supercie de revolucin (A, centrado y alineacin)
1 apoyo sobre la cara (B, testa o tope)
1 apoyo para posicionado angular (C, posicionamiento)
Para la representacin grca de los puntos de sujecin y comprobacin de que se
pueden cumplir las especicaciones de fabricacin y las herramientas son accesibles
a las supercies a mecanizar se cuenta con un cdigo de smbolos normalizado.
La norma NFE 04-013 propone la utilizacin de dos tipos de smbolos distintos,
de signicado bien preciso y que especican unvocamente tres aspectos diferentes.
La simbologa de la eliminacin de los grados de libertad que se indican en los
croquis de las hojas de anlisis o de la preparacin del trabajo.
La simbolizacin de los elementos tecnolgicos de apoyo y sujecin de la pieza
durante las operaciones de mecanizado y de control que denen los tiles
necesarios.
El smbolo base es una echa. La proyeccin del smbolo es un crculo u otra
traza, con rallado cruzado.
El SIMBOLO BASE se coloca sobre la supercie especicada o sobre una lnea
de cota del lado libre de dicha supercie. El segmento recto de la echa es normal
a la misma conservando as la idea de normal de localizacin".
4.7. Seleccin de mquinas herramientas 39
Cada SMBOLO base elimina un grado de libertad, as pues la puesta en posicin
de una pieza tal como hemos indicado anteriormente, ser necesario eliminar como
mximo seis grados de libertad.
Cada supercie recibir tantos smbolos como grados de libertad se deban elimi-
nar en ella, bien entendido que siempre se tienen que respetar las reglas establecidas
en las CONDICIONES DE ISOSTATICIDAD.
Es recomendable:
Numerar de 1 a 6 los smbolos.
Limitar el nmero de smbolos a los necesarios para realizar cada subfase.
Indicar la precisin que debe asegurar el procedimiento.
Simplicar la representacin, inscribiendo en un cuadro el n
o
de grados de
libertad que se eliminan siempre que no existan distintas posibilidades de
interpretacin.
En ningn caso los dos tipos de smbolos ( echa slo y echas con cuadrado)
deben emplearse simultneamente.
En el caso de la eliminacin directa de un grado de libertad de rotacin se
debe de utilizar un arco con echa en las diferentes proyecciones.
Para seleccionar las supercies de referencia sobre las que localizar la pieza se
parte del diagrama de subfases que relaciona las supercies generadas en las distintas
operaciones. De modo que la pieza se procura que apoye sobre las supercies en las
que existe alguna relacin dimensional o geomtrica con las supercies que se vayan
a generar.
4.7. Seleccin de mquinas herramientas
Establecer las restricciones tcnicas por las caractersticas que debe cumplir la
mquina herramienta para poder realizar la pieza. Esto se establece estudiando la
capacidad, precisin, y equipamiento mnimo necesario para las operaciones.
Se denen tambin la capacidad productiva, estableciendo el tiempo de prepa-
racin exibilidad necesaria de la mquina, nivel de especializacin del operario.
Se denen las restricciones econmicas, como los costes de planicacin de proce-
sos y programas, El coste hora-mquina, el coste de utillajes y herramientas, costes
de amarre y otros costes indirectos.
Teniendo en cuenta todo lo anterior se selecciona la mquina para que la carga
del taller est equilibrada, o bien se decide subcontratar el trabajo.
4.8. Seleccin de herramientas
Primero se procede a la seleccin del porta herramientas para cada operacin, y
despus se selecciona la plaquita necesaria.
40 Captulo 4. Planicacin de la fabricacin
4.9. Establecimiento de los datos de corte
En operaciones de mecanizado, una de las fases de la planicacin de procesos
es especicar los datos de corte, es decir, la profundidad de pasada, el avance y la
velocidad de corte.
Estas condiciones inuyen en las fuerzas de corte y potencias (que vendrn
limitados por las mquinas y amarres) y en la vida de herramienta. Todo ello inuir
en el tiempo de produccin y en el coste.
La profundidad de pasada seleccionada ser la mxima permitida por las fuerzas
de corte y las caractersticas tcnicas de la herramienta. Esto es as, para reducir la
mximo el nmero de reposicionamientos de la herramienta, y aprovechar al mximo
el ancho del lo.
El avance ser el mximo, condicionado por las fuerzas de corte, la potencia, y
la rugosidad supercial permitida en el acabado de la pieza.
El papel de la velocidad de corte es ms complejo pues inuye en la forma
del corte (es necesaria una velocidad mnima para que la viruta sea continua), la
potencia de corte, y en la vida del lo de la herramienta que suele seguir la ley de
Taylor.
Adems, puede interesar una velocidad u otra segn el parmetro que se quiera
optimizar, ya sea el tiempo promedio por pieza (que dara la mxima productividad),
el coste promedio por pieza (que dara el rgimen econmico de mnimo coste), o el
ujo de benecios (que dara el rgimen de mxima eciencia). Estas variables se
detallan al nal de este captulo.
4.10. Eleccin o diseo de utillaje
Dentro de la fase de diseo de la sujecin se pueden distinguir las siguientes
etapas:
1. Seleccin de la sujecin
Anlisis de la informacin de entrada
Seleccionar los datos de localizacin
Seleccin de los mtodos
Disear los mecanismos y aparatos
Diseo de la conguracin del amarre.
2. Anlisis del amarre
Estudio de precisin de la operacin
Clculo mecnico del amarre
Comprobacin de dao a la pieza
3. Salida del diseo del amarre
4.10. Eleccin o diseo de utillaje 41
Dibujo de conjunto del amarre
Dibujo de los componentes del amarre
Listado de los componentes normalizados
Instrucciones de control de calidad
4.10.1. Funciones del amarre
En los procesos de mecanizado, el aseguramiento geomtrico de una parte depen-
de principalmente de la posicin relativa de la pieza y la herramienta. El requisito
principal de un amarre es localizar una pieza en una posicin dada dentro de la
bancada de la mquina-herramienta. Para ello se utilizan distintos utillajes que, en
contacto con las distintas supercies de la pieza restringen los seis grados de libertad
(lineales y rotacionales). Esta posicin se ha de asegurar contra las fuerzas de corte,
vibraciones, etc., por lo que el amarre debe ser sucientemente rgido y estable.
Se ha de procurar que a lo largo del proceso las supercies acabadas que se
utilizan como referencia, y por lo tanto de apoyo, en operaciones posteriores no
resultan daadas por indentaciones que producen los propios utillajes.
Otro tipo de requisitos se suele pedir al amarre son la facilidad de cargar y
descargar la pieza, operacin de montaje simple y segura, coste reducido, facilitar
la automatizacin de la sujecin de la pieza, . . . .
4.10.2. Importancia de un buen diseo del amarre en fabri-
cacin
Los amarres son importantes tanto para la la fabricacin tradicional como para
los modernos Sistemas de Fabricacin Flexible. Afectan directamente a la calidad,
productividad y coste de los productos. El tiempo empleado en el diseo y la fabri-
cacin de los amarres inuye en la mejora y desarrollo de los productos.
Un buen diseo de amarre, por lo tanto, debe:
Prever, en la medida de lo posible, su capacidad para fabricar dentro de to-
lerancia, estimando el valor medio y la varianza de las cotas dimensionales o
geomtricas despus del proceso.
Congurar los amarres asegurando la jacin de la pieza. Esto requerir un
anlisis mecnico: Determinacin de las fuerzas de apriete y las fuerzas de
jacin.
Facilitar el control en entornos automatizados. Teniendo datos concretos de
fuerzas de apriete mnima y mxima.
Disear el contacto para que no se produzcan indentaciones en supercies
acabadas, y evitar deslizamiento cuando as se requiera.
. . .
Inuencia en la calidad, productividad, y el coste.
42 Captulo 4. Planicacin de la fabricacin
4.11. Otras operaciones
Las otras operaciones necesarias para completar la planicacin del proceso de
fabricacin son:
Confeccin del programa de mquina
Plan de Control de Calidad
Clculo de tiempos y de costes totales.
4.12. Clculo de tiempos y costes de fabricacin
4.12.1. Tiempo de produccin
El tiempo de produccin de un lote de N
b
piezas ser la suma de los siguientes
componentes:
Tiempo de arranque de viruta: N
b
t
m
Tiempo de no arranque de viruta comn a todas las piezas: N
b
t
l
Tiempo invertido en los cambios de herramienta: N
t
t
ct
El tiempo de arranque de viruta por pieza t
m
depende de la velocidad de corte,
si sta es continua ser inversamente proporcional a sta.
El tiempo de no arranque de viruta comn a todas las piezas t
l
hace referencia
a los tiempos de carga y descarga de pieza, y a los reposicionamientos de las herra-
mientas entre pasadas. Es el tiempo de produccin en el que no se est desgastando
la herramienta.
El nmero de herramientas invertidas en la fabricacin de un lote ser tal que
queden desgastadas cada vez que se cambien:
N
t
t = N
b
t
m
(4.1)
siendo t la vida de cada uno de los los de la herramienta que depende de la
velocidad de corte segn la ley de Taylor.
El tiempo promedio por pieza ser:
t
pc
= t
l
+t
m
+
N
t
N
b
t
ct
(4.2)
Al tiempo correspondiente por cada pieza, se le ha aadido la fraccin corres-
pondiente al cambio de herramienta que se realizar cada N
b
/N
t
piezas.
4.12. Clculo de tiempos y costes de fabricacin 43
4.12.2. Coste de produccin
En el coste de produccin entran los siguientes factores:
Coste medio por lo de herramienta C
t
Tasa horaria de la mquina M que son los gastos de la mquina slo por
existir: amortizaciones, salarios de operarios, gastos de mantenimiento, gastos
generales, . . .
Materia prima y energa. Estos gastos son jos por pieza y no dependen de
la velocidad de corte y que todas las piezas del lote provienen de la misma
proforma (materia prima), y adems se les arranca la misma cantidad de
material por operacin (misma energa especca de corte y misma cantidad
de material arrancado)
As pues el coste variable promedio por pieza ser:
C
pr
= M t
pr
+
N
t
N
b
C
t
(4.3)
4.12.3. Eciencia econmica
Es el benecio econmico obtenido por unidad de tiempo. Muchas veces no
importa tanto la reduccin del costo como la maximizacin del benecio por unidad
de tiempo. Si el precio de venta de cada pieza es S, la eciencia econmica por pieza
ser:
S C
pr
t
pr
(4.4)
4.12.4. Seleccin de la velocidad de corte
Las expresiones de tiempo, coste y eciencia se pueden expresar en funcin de
la velocidad de corte para cada una de las operaciones. Ya que las piezas constan de
distintas operaciones, cada una de las cuales tiene distinta velocidad y distintas he-
rramientas, la operacin de optimizacin requiere derivadas parciales de las distintas
velocidades. El problema es habitualmente desacoplable con lo que basta la opti-
mizacin de cada una de las operaciones por separado obteniendo su optimizacin
para los diferentes criterios.
Los distintos criterios para la seleccin de la velocidad ptima pueden ser los
siguientes:
Mxima productividad. Equivale a hacer mnimo el tiempo promedio por pie-
za, permitiendo que salgan mayor nmero de piezas para el mismo tiempo.
Este criterio se suele escoger cuando se est ya fuera de plazo en la entrega
del componente. Suele ser caro pues consume muchas herramientas.
44 Captulo 4. Planicacin de la fabricacin
Figura 4.1: Limado
Mnimo coste. Es el rgimen para el cual la pieza cuesta el mnimo tiempo
y, por lo tanto, se consigue el mayor benecio. Se suele escoger este rgimen
cuando la mquina no tiene ninguna prisa en acabar pues se prevee que puede
tener tiempos muertos.
Mxima rentabilidad. En este rgimen se maximiza la eciencia, de forma que
se maximiza el benecio ( o se minimizan las prdidas) por unidad de tiempo.
Suele ser oportuno cuando no va a faltar trabajo a la mquina y tampoco
aprietan los plazos.
Conviene, tener como datos de partida la velocidad de mnimo coste y la de
mxima productividad. Entre ellas se suele establecer el rgimen de funcionamiento,
teniendo en cuenta los plazos y los tiempos muertos de la mquina herramienta.
4.13. Economa de mecanizado
1. En un planeado con limadora (Figura 8.2), se pretende rebajar un bloque de
100 100 40 a un espesor de 36 mm con un avance de 0.5 mm/pasada. La
herramienta es de acero rpido con una ecuacin de Taylor v t
0,125
= 2,65
(v y t en unidades S.I.). Su coste es de 24 e(incluidos realados), la mquina
tiene una tasa horaria de 14 e/hora. El tiempo de cambio de herramienta
es de 200 s. El tiempo que tarda en reposicionar la herramienta despus de
cada pasada es 1.5 veces el tiempo de corte en una pasada (t
l
depende de la
velocidad de corte), y el tiempo de carga-descarga de pieza que son 100 s.
Calcular el tiempo por pieza de mxima productividad, y el mnimo coste de
cada pieza.
R: (t
pr
)
p
)= 147.56 s; (C
pr
)
e
=0.55 e
4.13. Economa de mecanizado 45
2. En una operacin de cilindrado de un lote de 1020 ejes 76 300 mm con
un avance f = 0,25 mm/rev. La herramienta utilizada es un carburo con
los siguientes parmetros de desgaste: n = 0,25, v
r
= 2 m/s, t
r
= 63 s. La
herramienta tiene un coste total de 1.25 epor alado. La tasa horaria de la
mquina es de 36 e. El tiempo de cambio de herramienta es t
ct
= 100 s. El
tiempo de carga y descarga de pieza es t
l
= 120 s. Calcular el tiempo mnimo
de fabricacin del lote en horas, y el coste mnimo del lote.
R: 65 h; 1393 e
3. En ensayos de vida de herramienta con plaquitas de carburo y una pieza de
acero, la vida de la herramienta se encontrn que era de 18.6 ks a v = 1 m/s y
de 363 s a 2 m/s. El coste de la plaquita es de 4.80 ey tiene 4 los. El tiempo
de cambio de lo es de 19 s y el de recambio de herramienta es 30 s.
a) Para una tasa horaria de 36 eCul es la vida de la herramienta de
mnimo coste?
b) Qu velocidad dar esta vida?
4. El tiempo de mecanizado en una operacin particular de torneado es 200 s y
la herramienta debe cambiarse cada 5 piezas. El tiempo no productivo es 310
s y el tiempo de cambio de herramienta es 152 s. La velocidad de corte es 2.5
m/s y la herramienta es del tipo de plaquita soldada de carburo cuyo coste
por alado es 3 e. El exponente de Taylor es de 0.25
a) Cunto debera cambiar la velocidad de corte para trabajar a coste
mnimo? (Tasa horaria 21.60 e)
b) Cunto se ahorrar por pieza trabajando a coste mnimo?
5. En una operacin de fresado perifrico, la fresa tiene 10 los para planear una
supercie de acero de 200 mm de longitud. El dimetro de la fresa es de 150
mm y es de acero rpido. El tiempo de cambio de cuchillas es de 5 min y la
vida de la herramienta viene dada por vt
0,125
= 2,61 donde v y t vienen en
unidades SI. La penetracin es de 14 mm. La tasa horaria 24 e, donde las
cuchillas cuestan 320 ey 12 esu realado. Las otras cuestan 120 ey 14.50 su
realado. El n
o
de realados de todas la cuchillas es 20. El tiempo de carga y
descarga es de 3 min.
a) Estimar el coste mnimo de produccin y su tiempo correspondiente cuan-
do la velocidad de avance es de 1 mm/rev.
b) Calcular los mismos datos si, mediante un utillaje especial, se reduce el
tiempo de carga y descarga en 30 s.
6. En una operacin con taladradora se pretenden realizar dos agujeros de 20
mm de profundidad y 5 mm de dimetro. El avance es de 0.1 mm/rev., la
broca tiene 2 cuchillas de 6 ecada una. El tiempo de carga y descarga es
46 Captulo 4. Planicacin de la fabricacin
30
50
20
Figura 4.2: Fresado Frontal
de 30 s, el de cambio de herramienta es de 28 s, el tiempo de retroceso y
reposicionamiento es de 6 s. La tasa horaria es de 6 e, y la ecuacin de Taylor
de cada cuchilla es v t
0,25
= 2,65 con expresiones en unidades S.I.
Determinar:
a) El tiempo de fabricacin promedio trabajando a coste mnimo.
b) La velocidad angular que tendr la broca trabajando en este rgimen en
r.p.m.
7. En una operacin de fresado frontal de la pieza de la gura 4.2. El avance
es de 0.2 mm/rev., la fresa tiene 7 cuchillas de 6.5 ecada una. El tiempo de
carga y descarga es de 30 s, el de cambio de herramienta es de 20 s, La tasa
horaria es de 30 e, y la ecuacin de Taylor de cada cuchilla es v t
0,5
= 2,01
con expresiones en unidades S.I.
Determinar:
a) El tiempo de fabricacin promedio trabajando a coste mnimo.
b) La velocidad angular que tendr la fresa trabajando en este rgimen.
8. Una mquina transfer de 1 estaciones tiene los siguientes parmetros:
Estacin L, m t
c
t, s C
t
, e M, e/s
1 181 180 2.40 0.0036
2 243 60 3.60 0.0028
3 61 130 2.40 0.0046
4 91 120 5.53 0.0036
5 122 541 1.40 0,0036
La herramienta sigue la ley vt
0,120
= 1,99 donde v y t vienen en unidades SI,
y el tiempo de indexacin es 52 s.
Calcular el coste mnimo por pieza y el tiempo en cada estacin.
4.13. Economa de mecanizado 47
Figura 4.3: Fresado Frontal
9. Una mquina transfer de 2 estaciones, tiene que producir la pieza de la gura
9.
En la primera estacin se realiza el escuadrado con una fresa perifrica de
d
t
= 150 mm, N=8 dientes y avance f = 1 mm/rev. El tiempo de cambio de
herramienta es de 180 s.
En la segunda estacin se realiza el taladrado con una broca de d
t
= 40 mm,
un ngulo de posicin
r
= 90
y un avance de f = 0,1 mm/rev. El tiempo
de cambio de herramienta es de 120 s.
Todos lo los tienen la siguiente ecuacin de Taylor vt
0,129
= 1,6 donde v y t
vienen en unidades SI, y el tiempo de indexacin es 12 s.
Calcular el tiempo mnimo promedio por pieza y la velocidad de rotacin de
la herramienta en cada estacin para este rgimen.
48 Captulo 4. Planicacin de la fabricacin
Captulo 5
Diseo y anlisis de utillajes de
amarre
5.1. Eleccin o diseo de utillaje
Dentro de la fase de diseo de la sujecin se pueden distinguir las siguientes
etapas:
1. Seleccin de la sujecin
Anlisis de la informacin de entrada
Seleccionar los datos de localizacin
Seleccin de los mtodos
Disear los mecanismos y aparatos
Diseo de la conguracin del amarre.
2. Anlisis del amarre
Estudio de precisin de la operacin
Clculo mecnico del amarre
Comprobacin de dao a la pieza
3. Salida del diseo del amarre
Dibujo de conjunto del amarre
Dibujo de los componentes del amarre
Listado de los componentes normalizados
Instrucciones de control de calidad
49
50 Captulo 5. Diseo y anlisis de utillajes de amarre
5.1.1. Funciones del amarre
En los procesos de mecanizado, el aseguramiento geomtrico de una parte depen-
de principalmente de la posicin relativa de la pieza y la herramienta. El requisito
principal de un amarre es localizar una pieza en una posicin dada dentro de la
bancada de la mquina-herramienta. Para ello se utilizan distintos utillajes que, en
contacto con las distintas supercies de la pieza restringen los seis grados de libertad
(lineales y rotacionales). Esta posicin se ha de asegurar contra las fuerzas de corte,
vibraciones, etc., por lo que el amarre debe ser sucientemente rgido y estable.
Se ha de procurar que a lo largo del proceso las supercies acabadas que se
utilizan como referencia, y por lo tanto de apoyo, en operaciones posteriores no
resultan daadas por indentaciones que producen los propios utillajes.
Otro tipo de requisitos se suele pedir al amarre son la facilidad de cargar y
descargar la pieza, operacin de montaje simple y segura, coste reducido, facilitar
la automatizacin de la sujecin de la pieza, . . . .
5.1.2. Importancia de un buen diseo del amarre en fabrica-
cin
Los amarres son importantes tanto para la la fabricacin tradicional como para
los modernos Sistemas de Fabricacin Flexible. Afectan directamente a la calidad,
productividad y coste de los productos. El tiempo empleado en el diseo y la fabri-
cacin de los amarres inuye en la mejora y desarrollo de los productos.
Un buen diseo de amarre, por lo tanto, debe:
Prever, en la medida de lo posible, su capacidad para fabricar dentro de to-
lerancia, estimando el valor medio y la varianza de las cotas dimensionales o
geomtricas despus del proceso.
Congurar los amarres asegurando la jacin de la pieza. Esto requerir un
anlisis mecnico: Determinacin de las fuerzas de apriete y las fuerzas de
jacin.
Facilitar el control en entornos automatizados. Teniendo datos concretos de
fuerzas de apriete mnima y mxima.
Disear el contacto para que no se produzcan indentaciones en supercies
acabadas, y evitar deslizamiento cuando as se requiera.
. . .
Inuencia en la calidad, productividad, y el coste.
5.1.3. Seleccin de factores a analizar
Causas de fallos debidos al utillaje ms habituales son las siguientes:
5.1. Eleccin o diseo de utillaje 51
Baja precisin dimensional en elementos que intervienen en el proceso
Fuerza de apriete insuciente
Fuerza de apriete excesiva o geometra de contacto inconveniente
Estimacin errnea de los coecientes de rozamiento
Vibraciones cercanas a la frecuencia natural, . . .
Estos fallos traen como consecuencia:
Errores dimensionales y geomtricos de la pieza (por desviacin, o por disper-
sin)
Deslizamiento de la pieza durante el proceso por relajamiento, bajo rozamiento
. . .
Dao de la pieza: Indentaciones, desgaste por fretting, fatiga, . . . .
De las causas fallos enumerados anteriormente, las tres primeras se pueden con-
siderar las ms crticas, son las que provocan los fallos ms importantes en la fabri-
cacin, adems requieren mayor dominio numrico para obtener los valores vlidos
que faciliten el control del proceso. Por lo tanto nos vamos a centrar en estos tres
aspectos para establecer la metodologa de anlisis a emplear.
La seleccin de la fuerza de apriete ser la mnima para tener garantas que la
pieza no se va a mover, pero con cierto margen de seguridad sobre lo que podra
provocar el dao a la pieza.
Los datos de la mquina herramienta utilizada no se han tenido en cuenta en
los clculos suponiendo que los fallos se deben a los utillajes y a su disposicin.
Tampoco se han tenido en cuenta en estos anlisis las frecuencias naturales del
conjunto amarre pieza incluyndose este estudio en el clculo de los coecientes de
seguridad.
5.1.4. Metodologa del anlisis
La aplicacin de estos principios a un amarre concreto, depende principalmente
de la experiencia y la habilidad del diseador del proceso. La disposicin de herra-
mientas de clculo que permitan reproducir el comportamiento del amarre durante
el proceso, ahorra mucho tiempo de diseo y pruebas de ensayo-error.
Los estudios que se van a realizar sobre el amarre son los fundamentales para
que el proceso produzca productos de la mxima calidad:
1. Estudio de precisin de la operacin
2. Clculo mecnico del amarre
a) Determinacin de las fuerzas de apriete
52 Captulo 5. Diseo y anlisis de utillajes de amarre
b) Accin sobre los mecanismos de apriete
c) Distribucin de fuerzas sobre supercies
3. Comprobacin de dao a la pieza
a) Geometra de contacto y presiones superciales
b) Contacto hertziano: Entre cilindros y entre esferas
c) Contacto con deslizamiento parcial
d) Inuencia de la rugosidad supercial
e) Tensiones de contacto:uencia plstica supercial.
5.2. Estudio de la precisin de la operacin de la
operacin
La principal funcin del amarre es localizar la pieza en la mquina de herra-
mienta con el n de que las supercies generadas por la herramienta cumplan las
especicaciones dimensionales y geomtricas de diseo. Estas especicaciones se han
de traducir en datos de localizacin y programacin de trayectoria de herramien-
ta. Los datos de localizacin son los puntos, lneas y supercies que se usan como
referencia para la generacin de supercies.
La precisin de la operacin vendr dada por la concordancia de los datos de la
pieza fabricada con:
Datos de diseo: Basados en los requisitos de diseo y funcionalidad.
Datos de Fabricacin: usados para la operacin, la localizacin y medicin.
Para la localizacin se utiliza el principio de isostaticidad, es decir, para que
un objeto est bien situado en el espacio debe tener restringido los seis grados
de libertad(3 rotaciones + 3 traslaciones). Estas restricciones se suelen realizar
mediante apoyos, cada uno de los cuales restringe un grado de libertad mediante la
jacin en el espacio de un punto. Un caso tpico es el mtodo 3-2-1 de sujecin de
piezas prismticas las cuales tienen un plano base que viene denido por 3 puntos
de apoyo, el deslizamiento de la pieza en una direccin y su rotacin se restringen
mediante dos puntos denidos por una alineacin, y el deslizamiento en la otra
direccin se realizar mediante el sexto apoyo.
Para determinar la precisin de mecanizado se va a proceder a determinar cules
son las fuentes de error, se analizar la incertidumbre de fabricacin a partir de las
incertidumbres de las fuentes de error.
Las fuentes de error de localizacin principales son las siguientes:
posicionamiento de la herramienta
planitud de la bancada
5.2. Estudio de la precisin de la operacin de la operacin 53
precisin dimensional del utillaje
dimensin y forma de la pieza en las supercies usadas como refe-
rencia
colocacin de la pieza mediante los utillajes
De entre estas fuentes de error se va a estudiar principalmente la tercera y
cuarta de las enunciadas, ya que no dependen tanto de la mquina herramienta
cuya precisin depender de cada una, y tampoco depende de la habilidad manual
del operario. Adems estas dos causas son las que van a variar el posicionamiento
de las supercies de referencia respecto a una posicin ideal que producira piezas
perfectas en una mquina herramienta perfecta.
Lo que se pretende con el presente estudio es determinar la capacidad de un
diseo se sujecin determinado para fabricar dentro de tolerancia. Para ello se ne-
cesitar conocer la precisin dimensional del utillaje determinado mediante anlisis
metrolgico, y la precisin de la preforma en sus supercies de apoyo que dependera
de la precisin de las operaciones anteriores.
La metodologa de anlisis sera la siguiente:
(a) Posicionamiento real de las supercies de referencia. Lo cual vendr determi-
nado por la abilidad de utillajes y preforma
(b) Posicin de los puntos de cota. Que utilizar el cambio de sistema de referencia
obtenido en el punto anterior
(c) Estimacin de valor real de cota de fabricacin
(d) Estimacin de incertidumbre de una cota de fabricacin
Los dos ltimos datos estimados son aquellos que se obtendran en un control
de calidad y por lo tanto los que determinaran si la pieza o lote es aceptable o no.
5.2.1. Posicionamiento real de las supercies de referencia
Como se ha visto anteriormente, se supone que la mquina herramienta es per-
fecta, por lo que la posicin del punto de corte, en un sistema de coordenadas con
base en la bancada, ser siempre la que se indique en el plano de diseo. Los errores
sern introducidos por imprecisiones en el utillaje (dimensiones y posicionamien-
to) sobre los que apoyan las supercies de referencia que son origen de cota de la
supercie mecanizada.
Una supercie de referencia puede ser en el mtodo 3-2-1 (de posicionamiento
de piezas prismticas) una de las tres entidades siguientes:
Tope: Denido por un punto en el espacio y por lo tanto el utillaje o la
preforma puede introducir un error respecto a su posicionamiento ideal de
x, y, z
54 Captulo 5. Diseo y anlisis de utillajes de amarre
Alineacin: Denido por dos puntos por lo que adems de los errores en la
traslacin de estos puntos se introduce un error geomtrico de alineacin de
Plano de apoyo: Denido por la posicin de tres puntos por lo que adems de
la traslacin de estos puntos se introduce el error de paralelismo denido por el
giro de su vector director denido por los cosenos directores de +
x
+
y
+
z
Para iniciar el anlisis se necesitarn los siguientes datos de partida de los puntos
localizadores (puntos de apoyo en las supercies de referencia):
Valor nominal. Sera la el posicionamiento ideal.
Valor medio real (obtenido de la medicin)
Incertidumbre (con su constante K)
5.2.2. Posicionamiento de los puntos de cota
Segn el principio de isostaticidad una pieza est perfectamente localizada a
partir de sus apoyos. La imprecisin de los apoyos se traducir en un cambio de
sistema de referencia respecto al ideal. La posicin del punto de corte, que viene
dado por el programa de mquina, mecanizar un punto que en la medicin nal
depender del posicionamiento de los apoyos. As pues, las imprecisiones en el uti-
llaje y en la preforma han introducido un cambio de sistema de referencia para la
determinacin del punto de corte: La herramienta corta segn el sistema de ejes de
la mquina pero la cota conseguida depender del sistema de referencia dado por
el posicionamiento real de las supercies de referencia. Este nuevo posicionamiento
de los puntos de cota se puede determinar por las matrices de transformacin de
coordenadas.
Una variacin de posicin en el espacio se puede traducir, segn los principios
de la cinemtica en la traslacin de un punto del objeto y una rotacin alrededor de
ese punto. Conociendo la diferencia de posicin en la mquina herramienta con la
posicin ideal se pueden estimar los errores tanto dimensionales como los de forma.
Si se determina la variacin de coordenadas de un punto del objeto al rotar un
ngulo
x
_
_
_
x
_
_
_
=
_
_
1 0 0
0 cos
x
sen
x
0 sen
x
cos
x
_
_
_
_
_
x
y
z
_
_
_
(5.1)
Si aplicamos las siguientes matrices de transformacin correspondientes a los
giros respecto los ejes y (
y
) y z(
z
) sucesivamente quedar la siguiente coordenada
del punto nal respecto al inicial:
5.2. Estudio de la precisin de la operacin de la operacin 55
_
_
_
x
_
_
_
=
_
_
cos
z
cos
y
sen
z
cos
x
cos
y
sen
y
sen
x
cos
z
sen
y
cos
x
+ sen
z
sen
x
sen
z
cos
y
sen
z
sen
y
sen
x
+ cos
z
cos
x
cos
z
sen
x
sen
z
sen
y
cos
x
sen
y
cos
y
sen
x
cos
y
cos
x
_
_
_
_
_
x
y
z
_
_
_
(5.2)
Si los ngulos son muy pequeos, en la matriz de transformacin se pueden
eliminar los trminos cuadrticos de los senos y simplicar los cosenos a 1, adems,
aadiendo la traslacin queda:
_
_
_
x
_
_
_
=
_
_
1 sen
z
sen
y
sen
z
1 sen
x
sen
y
sen
x
1
_
_
_
_
_
x
y
z
_
_
_
+
_
_
_
x
y
z
_
_
_
(5.3)
5.2.3. Valor de cota esperado
Una cota hace referencia a la distancia entre:
Dos puntos
Punto y plano
Punto y lnea
Lnea y plano
En la representacin bidimensional, ya sea en el plano de diseo o en el plano
de fabricacin, los planos se proyectan en lneas, y stas se denen por dos puntos.
A la hora de medir una cota se suelen escoger los puntos extremos de esa cota por
representar los posibles valores extremos en la comprobacin de esa cota.
Por lo tanto, una supercie en un plano de fabricacin viene representada por 2
puntos extremos (A y B), cada uno de los cuales tendr su posicionamiento respecto
al sistema de referencia denido por el utillaje. En ese sistema de referencia se
denirn las cotas d
A
= z
01
z
A
y d
B
= z
02
z
B
siendo z
01
y z
02
los puntos de
referencia de las cotas de los puntos A y B respectivamente.
Cota de fabricacin esperada ser el valor del punto medio
d
med
=
d
A
+d
B
2
(5.4)
5.2.4. Estimacin de la incertidumbre de fabricacin espera-
da
La determinacin de la incertidumbre de fabricacin esperada, se realizar me-
diante previa obtencin de la varianza esperada mediante la Ley de Propagacin
de Varianzas (LPV) muy usada en metrologa. De este modo se puede obtener el
intervalo de conanza para un nivel de conanza similar a los que se han tenido en
cuenta al obtener las incertidumbres de cada uno de los parmetros.
56 Captulo 5. Diseo y anlisis de utillajes de amarre
Ley de propagacin de varianzas:
u
2
=
_
L
_
2
u
2
L
+ +
_
m
_
2
u
2
m
la aplicacin de esta ley tiene, entre otras, las siguientes ventajas:
Permite determinar la inuencia de un parmetro en el error global, mediante
el anlisis de cada uno de los sumandos.
Es muy til para planear estrategias con el n de colocar la fabricacin dentro
de tolerancia
Esta ley se aplica al valor de cota esperado d
med
=
d
A
+d
B
2
, pero se ha de tener
en cuenta que este valor sera el valor de la cota del punto medio entre A y B, por
lo que no tiene en cuenta toda la supercie a la hora de determinar su variabilidad.
Para ello se seiene en cuenta la desviacin media que ser: d
des
=
d
A
d
B
2
La incertidumbre de cota ser: U
d
= K
_
u
2
dmed
+u
2
ddes
siendo K el valor de la
constante de incertidumbre (2 o 3 segn el nivel de conanza que se est persiguien-
do).
5.2.5. Ejemplos Prcticos
Paralelismo del mecanizado de una supercie plana
En este ejemplo se va a determinar la inclinacin de una supercie mecanizada
sobre una mquina herramienta, debida a la imprecisin del utillaje empleado en
la sujecin de la pieza. Se trata de mecanizar una supercie plana paralela a la de
referencia, la cual se apoya en tres puntos mediante tres piezas las cuales tienen
una medida determinada y una incertidumbre, sus cotas en z son 9.81, 10.22 y
10.18 mm y la desviacin tpica de todas ellas es u
z
= 0, 15 mm. Los tres apoyos
se han dispuesto para que formen un tringulo equiltero de lado L = 50 mm con
una desviacin tpica de posicionamiento de u
L
= 1 mm. Se sabe que la mquina
herramienta tiene una desviacin tpica en cuanto capacidad de hacer supercies
paralelas se supone de u
m
= 0
.
Para resolver el problema se va a proceder determinar el vector director del plano
resultante y a calcular el ngulo que forma con el perpendicular ideal. A continuacin
por el principio de propagacin de varianzas se estima la incertidumbre de dicho
ngulo.
Los vectores directores de los apoyos sern
OA = {0, 0, z
a
}
OB = {Lcos(60
), Lsen(60
), z
b
}
OC = {L, 0, z
c
}
(5.5)
5.2. Estudio de la precisin de la operacin de la operacin 57
A C
V
O
B
Figura 5.1: Alzado y perl de pieza sujetada con 3 apoyos
El vector director del plano de los apoyos
V vendr dado por el producto vectorial
de los dos lados del tringulo rectngulo
AB y
AC:
c
AB =
OB
OA
AC =
OC
OA
V =
AB
AC
(5.6)
El ngulo que forma el plano de los apoyos vendr dado por el arcocoseno del
producto escalar de los vectores normalizados de
V y del eje OZ con lo que queda
la siguiente expresin nal:
= arc cos
_
Lsen(60
)
_
((z
a
+z
b
) (z
a
+z
c
) cos(60
))
2
+ (Lsen(60
))
2
+ ((za +zc) sen(60
))
2
_
(5.7)
Aplicando los datos del problema el resultado es de 0.52
. Queda por determinar
la incertidumbre de fabricacin de esta magnitud en base a la incertidumbre en los
apoyos y de la mquina herramienta. Para ello aplicamos la ley de propagacin de
varianzas (LPV).
Para aplicar la LPV se ha de derivar la funcin respecto a dada una de
sus variables. La expresin resultante es gigantesca pero asequible gracias a los
programas de matemticas disponibles que permiten la derivacin simblica de las
variables y su clculo, de forma que se ha obtenido la inuencia de la varianza de
cada uno de los parmetros en el ngulo de inclinacin del plano mecanizado:
u
2
=
_
L
_
2
u
2
L
+ +u
2
m
(5.8)
58 Captulo 5. Diseo y anlisis de utillajes de amarre
f30
a
5
100
50
d
200
O
1
A
B O
2
h
Figura 5.2: Alzado y perl de eje y chaveta
Usando una constante K = 3 se obtiene una incertidumbre de ngulo de incli-
nacin:
U
= Ku
= 1,81
(5.9)
Incertidumbre en el mecanizado de un chavetero en un eje
En el siguiente ejemplo se va estudiar la profundidad de un chavetero de 5063
que se mecaniza en un eje de dimetro D = 30,05 mm con U
D
= 0,04 mm (K
D
= 2)
que apoya en dos bloques en V distanciados una distancia L = 200 mm. El vrtice
del primero de los bloques esta a una distancia de la bancada de z
o1
= 4,98 mm y
el segundo a z
o2
= 5,05 mm. Estos bloques en V tienen la misma incertidumbre de
posicionamiento en z de U
z
= 0,02 mm (K
z
= 2), y su ngulo es de = 90
con
una incertidumbre de U
= 1
(K
= 2). Si la chaveta est situada entre la cota en
x de 100 y 150 mm. determinar el valor esperado de la profundidad del chavetero y
el valor de su incertidumbre de fabricacin.
Comenzamos resolviendo el problema de posicionamiento vertical del centro del
cilindro en un bloque en V hasta su vrtice.
h =
D
2 sen(/2)
+z
0
(5.10)
5.2. Estudio de la precisin de la operacin de la operacin 59
La varianza asociada ser
u
h
=
u
z0
2
+
_
u
D
2 sen(/2)
_
2
+
_
Du
4tg(/2) sen(/2)
_
2
(5.11)
Se establece el origen de coordenadas en el centro nominal de uno de los apoyos
a una distancia de la bancada y
n
y
n
= 5 +
30
2 sen(90
/2)
(5.12)
Las nuevas coordenadas del eje de simetra pasando por los apoyos son:
y
o
= h
1
y
n
y
o2
= h
2
y
n
(5.13)
Respecto al ngulo que forma el eje se tiene que
= arcsen
y
o
y
o2
L
(5.14)
y su varianza ser
u
=
1
L
2
_
(y
o
y
o2
)
2
u
2
L
+ 2L
2
u
2
h
1
_
(y
o
y
o2
)
L
_
2
(5.15)
A partir del ngulo se puede obtener la cota d a partir de la coordenada de
los puntos A y B.
OA = {100,
D
2
d}
OB = {100 + 50,
D
2
d}
(5.16)
Aplicando la matriz de transformacin de coordenadas de la ec. (5.3) se obtienen
las siguientes coordenadas en y:
y
A
= D/2 d +y
o
100 sen
y
B
= D/2 d +y
o
(100 + 50) sen
(5.17)
La cota d resultante en cada uno de los puntos se obtendrn mediante:
d
A
= D/2 y
A
d
B
= D/2 y
B
(5.18)
El valor medio de fabricacin ser:
d
med
=
d
A
+d
B
2
(5.19)
60 Captulo 5. Diseo y anlisis de utillajes de amarre
La desviacin media ser:
d
des
=
d
A
d
B
2
(5.20)
La incertidumbre de la cota obtenida ser por la ley de propagacin de varianzas,
con K = 2
U
d
= 2
_
u
2
dmed
+u
2
ddes
(5.21)
Los valores numricos resultantes del problema sern:
d = 3,06 mm
U
d
= 0,50 mm
(5.22)
5.3. Clculo mecnico de amarres
En el amarre de las piezas es importante que la pieza est bien localizada a lo
largo de todo el proceso de corte, lo cual signica que debe permanecer inmvil a
pesar de las altas fuerzas a las que est sometida.
Un principio bsico en en el amarre es la isostaticidad, para que la responsa-
bilidad de la localizacin recaiga sobre unos apoyos que restrinjan los seis grados
de libertad. Para asegurar que la pieza est continuamente en contacto con esos
apoyos se somete adems a unas fuerzas de apriete. stas deben ser lo suciente-
mente altas para que las fuerzas originadas en el proceso no deslocalicen la pieza,
pero tambin tiene su lmite ya que han de respetar la integridad de la pieza y no
provocar grandes deformaciones.
El efecto de las grandes deformaciones en la calidad de la pieza no es signicativo
en el caso de que haya una operacin de acabado adems de la de desbaste, ya que
las fuerzas de corte en este caso son mucho menores y por lo tanto tambin las
deformaciones. En caso contrario habr que compensar los desplazamientos con la
cota programada de la herramienta.
El posible dao de la supercie acabada de la pieza sobre la que acta una
fuerza de presin debido al apoyo o al apriete tambin limita la fuerza del amarre.
En realidad la fuerza que acta sobre una supercie no es puntual sino que es la
resultante de una distribucin determinada de presiones. Para el clculo de esta
distribucin de presiones as como el dao que produce en la pieza se dedicar
la ltima seccin. Como regla general sirva que cuando mayor es la supercie de
contacto, menores ser el dao producido a la pieza. Cuando la supercie de contacto
es muy grande, las deformaciones estructurales tambin inuyen en la distribucin
de presiones, con lo que es buen contar con algn procedimiento de clculo para
calcular este mximo y no descargarlo sobre el coeciente de seguridad K.
En esta seccin se estudiar en primer lugar la fuerza de amarre, se expondr
los distintos tipos de elementos y su capacidad para provocar esa fuerza, despus se
calcular las deformaciones y la manera en que afectan a la calidad de fabricacin.
Los datos obtenidos en esta seccin se utilizarn como dato de partida para el
anlisis del posible dao a la pieza.
5.3. Clculo mecnico de amarres 61
1
9
D'
D
F
y
Q
y
Q
t
Figura 5.3: Par de fuerzas en una operacin de torneado
5.3.1. Determinacin de las fuerzas de apriete
A partir del clculo de la fuerza de corte y su direccin, mediante las ecuaciones
de equilibrio se pueden obtener las reacciones tericas en los amarres. Esta reaccin
terica se suele multiplicar por un coeciente de seguridad K que tiene en cuenta
distintos factores no calculados como las vibraciones, desgaste de las herramientas,
aceleraciones, posibles impactos, distribucin no uniforme de carga a lo largo de
supercies de contacto, etc. Habitualmente K = 2,5 3,0 para operaciones de
desbaste, y K = 1,5 2,0 en operaciones de acabado.
Las ecuaciones de equilibrio de fuerzas y momentos proporcionan las fuerzas que
soporta el amarre. De este modo se pueden obtener las fuerzas de apriete mnimo
para una operacin de torneado o fresado. Por convencin se van a denominar F a
las fuerzas de corte, Q a las fuerzas de apriete, y los subndices x, y, y z se reeren a
la direccin de la fuerza segn los ejes de la mquina-herramienta, y los subndices
r y t, se reeren a las la descomposicin de las fuerzas segn sus componentes radial
y tangencial respectivamente.
Fuerzas de apriete para una operacin de torneado
En una operacin de torneado de una pieza sujetada en un plato de n garras, se
tiene que la fuerza mayor en comparacin con todas las dems es la fuerza de corte
que resulta del producto de la fuerza especca de corte por el rea de corte. Esta
fuerza genera sobre el amarre un momento torsor, y un momento ector. Despre-
ciando el ector respecto al torsor, el rozamiento de las garras debe ser suciente
para resistir el momento creado por la fuerza de corte.
Si se supone una posicin en el que una de las garras est en el punto ms alto
tal como muestra la gura 5.3, por equilibrio de fuerzas segn la direccin y se tiene
que
Q
y
= F
y
(5.23)
El lmite a la fuerza tangencial viene dado por el coeciente de rozamiento
mximo
Q
t
= Q
y
(5.24)
62 Captulo 5. Diseo y anlisis de utillajes de amarre
y por equilibrio de momentos se obtiene que:
nQ
t
D
2
= F
y
D
2
(5.25)
siendo D el dimetro de la pieza en el cual se aplica la fuerza de corte, y D
el
dimetro de la pieza en la zona de garras.
De ests expresiones se obtiene que la fuerza normal de apriete debe tener como
mnimo el siguiente valor:
Q
y
=
F
y
D
nD
(5.26)
El valor de F
y
se obtiene mediante los mtodos habituales de la mecnica de
corte.
Fuerza de apriete en un ranurado de cilindro apoyado en 2 bloques en V
En la operacin de ranurado se obtiene que la sujecin en el sentido axial re
realiza mediante un tope, el eje est alineado mediante dos bloques en V, y la
fuerza de apriete se realiza mediante un tope vertical que presiona el eje a los dos
bloques. Las fuerzas de corte en el ranurado son axiales o perpendiculares al eje.
Se considera que las fuerzas axiales estn perfectamente controladas por un tornillo
posicionador, y que el parmetro a controlar es la posicin el apriete y su fuerza
para evitar el deslizamiento del eje por cualquiera de las caras del bloque en V.
La fuerza de corte se calcula mediante el los mtodos de la mecnica de corte.
Esta fuerza tiene una direccin tangencial en la zona de la ranura. El equilibrio de
fuerzas y momentos en el eje y proporcionar la reaccin en cada uno de los bloques
en V R
z1
y R
z2
. El equilibrio de fuerzas y momentos en el eje Z proporcionar
las reacciones en los apoyos segn la direccin y debido a la fuerza de apriete
Q
y
. Tomando ahora la seccin transversal del eje en dada uno de los bloques, se
pueden obtener las reacciones en cada una de las caras del bloque. Estableciendo
la condicin de no-deslizamiento en las caras del bloque debido al rozamiento, se
puede establecer la Fuerza de apriete mnima Q
y
para que la pieza est siempre
localizada.
Las ecuaciones de equilibrio de fuerzas y momentos sobre el eje son las siguientes:
Q = R
y1
+R
y2
Ql
1q
= R
y2
l
12
F
z
Q
z
= R
z1
+R
z2
F
z
l
z2
= R
z1
l
12
+Q
z
(l
12
l
1q
)
(5.27)
Siendo l
ij
la distancia entre los puntos i y j.
Las ecuaciones de equilibrio en cada uno de los bloques en V son:
(q
1r
+q
2r
) sen(/2) + (q
1t
q
2t
) cos(/2) = R
y
(q
1r
q
2r
) cos(/2) (q
1t
+q
2t
) sen(/2) = R
z
R
z
= q
1t
+q
2t
(5.28)
5.3. Clculo mecnico de amarres 63
F
z
R
z2
R
z1
Ry1
Q
R
y2
R
y
R
z
q
1r
q
1t
q
2t
q
2r
a
Figura 5.4: Fuerzas en el ranurado de un eje
El sistema es hiperesttico ya que los dos puntos de apoyo aportan fuerza de
rozamiento cuando en el sistema isosttico bastara que lo aplicara slo uno. Para
salvar este problema se ha establecido que la contribucin de cada punto a frenar
el par torsor es proporcional a la carga normal soportada en cada cara, lo cual
es consistente con la teora de rozamiento de Coulomb que establece que el rea
de contacto(y por lo tanto la fuerza de rozamiento) entre dos supercies rugosas
es proporcional a la carga aplicada. De esta forma se establece un coeciente de
antideslizamiento
i
en cada uno de los apoyos.
i
=
q
1ti
q
1ri
(5.29)
Haciendo los siguientes cambios de variable se puede obtener la solucin al sis-
tema de ecuaciones del bloque en V
a = q
1r
+q
2r
b = q
1r
q
2r
(5.30)
64 Captulo 5. Diseo y anlisis de utillajes de amarre
Por sustitucin se obtienen los siguientes resultados:
b =
R
z
(1 + sen(/2))
cos(/2)
a =
R
y
_
R
2
y
4R
2
z
sen(/2)(1 sen(/2))
2 sen(/2)
(5.31)
El discriminante para la obtencin de a es siempre que las ecuaciones de equili-
brio de la viga no la despeguen de cualquiera de la cara de los bloques.
Ejemplo numrico: Para el ejemplo de cuyas dimensiones coinciden con la
gura 5.2, suponer que a fuerza de corte es de 500 N mecanizando el extremo ms
cercano al punto 2 , se coloca un apriete vertical centrado a 50 mm del apoyo 1.
Suponiendo un coeciente de rozamiento esttico entre el cilindro y las caras del
bloque de = 0,1 calcular la fuerza de apriete mnima.
Aplicando las ecuaciones anteriores y suponiendo que el apriete se produce con
una almohadilla que amortige las tensiones de contacto con lo que Q
z
= 0, las
condiciones que debe cumplir la fuerza de apriete deben ser la de discriminante en
mayores o iguales a 0, y que el coeciente antideslizante sea menor que el coeciente
de rozamiento esttico.
Probando valores de Q se obtiene que el discriminante en el apoyo 2 deja de ser
negativo a partir de un valor de Q = 2200 N, para este valor el bloque 1 ha est
adherido, pero para que en los dos bloques haya adhesin, la fuerza de apriete ha
de ser de al menos 7300 N.
5.3.2. Accin sobre mecanismos de apriete ms usuales
La fuerza de apriete calculada en el apartado anterior hay que traducirla en una
fuerza que se aplica al aparato de sujecin. Entre los aparatos de sujecin se van a
estudiar tres: cuas, tornillos y palanca de levas.
Ahora intervienen dos elementos ms en el mecanismo: la accin sobre el aparato
(R), y el elemento de apoyo del aparato sobre el que se ejerce una accin S.
Clculo de aprietes con cuas
La cua es un mecanismo simple de sujecin muy usado en en el diseo de
amarres. En la gura se muestra el principio de funcionamiento de la cua. Para
una accin externa R, se produce una fuerza de amarre normal sobre la pieza de Q,
cuya relacin viene dada en funcin de los ngulos de friccin sobre la pieza
1
y
sobre la sujecin secundaria
2
.
Segn el diagrama polar de fuerzas se obtiene que:
Q =
R
tan
2
+ tan( +
1
)
(5.32)
La condicin de autobloqueo consiste en que cuando deje de actuar la fuerza
R la fuerza de amarre permanezca igual. Los sentidos de las fuerzas de friccin se
5.3. Clculo mecnico de amarres 65
R
Q'
S
R
S Q'
Q
b
2
b +a
1
Figura 5.5: Esfuerzos y diagrama polar en una sujecin con cua
volvern contrarios para resistir el movimiento de la cua. Para que ello ocurra
1
+
2
. Teniendo en cuenta los valores usuales del coeciente de friccin, el
ngulo de cua suele estar comprendido entre 6
y 8
.
Cuando se usan accionamientos continuos de sujecin, no hace falta falta la
propiedad de autobloqueo por lo que se suelen permitir ngulos de cua mayores.
En sistemas de fabricacin de produccin en masa es popular el uso de la cua
con rodillo para amplicar la fuerza de amarre.
Clculo de aprietes con tornillos
El sistema de apriete con tornillos es el ms usado en todos los tipos de mecanis-
mos. Sus ventajas son su estructura simple, la gran amplicacin de fuerza obtenida,
y la abilidad en la propiedad de autobloqueo. Sus principal inconveniente es la re-
lativa lentitud de operacin que limita su utilizacin en produccin automatizada.
El mecanismo se aplica bsicamente en dos formas: Directamente contactando
la punta con la pieza, e indirectamente aplicando la fuerza en medio de un brazo de
palanca uno de cuyos extremos es jo y el otro presiona sobre la pieza.
El mecanismo de apriete es similar al de cua, si la rosca se toma como la
supercie de una cua cuyo ngulo es el ngulo de hlice del tornillo (p/(D)), el
accionamiento sobre la rosca se obtiene por equilibrio de momentos. Despreciando
el rozamiento en la punta queda:
Q =
2 R L
D(tan( +
2
))
(5.33)
66 Captulo 5. Diseo y anlisis de utillajes de amarre
L
D
Q
Figura 5.6: Apriete mediante tornillo
Clculo de aprietes con palanca de levas
El mecanismo de levas es el ms rpido en cuanto a implementacin de suje-
ciones. Habitualmente se usa una leva cilndrica cuyo dentro de giro o est a una
distancia e de su centro geomtrico. El mecanismo de apriete es el de cua pero con
ngulo variable. Segn la conguracin de la gura, la distancia de la supercie de
la pieza al eje excntrico debe ser tal que el ngulo que forman la interseccin de las
dos circunferencias sea menor que el ngulo de friccin para que exista autobloqueo.
La fuerza de amarre ser igual a:
Q =
R L
(r +) tan( +)
(5.34)
El ngulo mximo de para la condicin de autobloqueo es la siguiente:
e
r
tan (5.35)
Ejemplo de sujecin. Calcular accin para con una fuerza de 300 N provocar
un apriete de 7300 N.
Para provocar una accin de 7300 N mediante un tornillo, mediante una palanca
en el que el apriete est entre el apoyo y el tornillo, 50 mm y 50 mm respectivamente,
la fuerza que ha de ejercer el tornillo es de 3650 N, para lo que ha de tener un
5.3. Clculo mecnico de amarres 67
e
a r+d
L
R
r
Figura 5.7: Apriete mediante palanca de leva
68 Captulo 5. Diseo y anlisis de utillajes de amarre
dimetro mnimo de 5 mm(si se le supone una resistencia de 350 MPa), si tiene 16
espiras por pulgada, equivale a un ngulo de cua de 1 deg, con lo que si se aplica
la ecuacin 5.33 se obtiene un par que para aplicar 300N se necesita un brazo de
284 mm.
5.3.3. Anlisis de fuerzas de contacto del amarre
En el anterior apartado se han calculado las fuerzas de apriete necesarias para
que la pieza quede bien jada, para ello se han supuesto cargas puntuales sobre las
supercies, pero en realidad, lo que acta sobre la supercie son unas distribuciones
de presiones sobre determinadas reas de contacto. Cuanto mayores sean las reas
menor sern las presiones, pero lejos de repartirse la carga uniformemente sobre la
supercie, la distribucin depende de la forma de deformarse los cuerpos alcanzado
picos de presin que pueden realmente daar la pieza.
Habitualmente, para aumentar la supercie de contacto se suelen proceder con
distintas tcnicas:
Aumentar el nmero de apoyos sobre supercies grandes, quedando la pieza
sobrelocalizada
Aumentar la longitud de la pieza sobre la que apoya una supercie cilndrica
Apoyar supercies planas sobre otras tambin planas
En todos lo casos el clculo de la distribucin de fuerzas o de presiones requiere
el estudio de las deformaciones, ya que el sistema ha dejado de ser isosttico (que
es lo ideal para tener bien localizada la pieza en la mquina herramienta) para ser
hiperestticos.
En este apartado se va a ver cmo inuyen las fuerzas de corte y de apriete en
la distribucin de fuerzas sobre las supercies de apoyo. Al implicar el estudio el
clculo de deformaciones, se puede estudiar de paso las dimensiones nales de la
pieza. Para ello se va a suponer que el corte es continuo y equilibrado, por eso se
desprecian los efectos vibracionales y se puede estudiar el problema como si fuera
esttico.
Como los sistemas de contacto multicuerpo son muy variados, y se presentan
bajo formas muy diferentes, a continuacin se va a formular el problema general
con las tcnicas para resolverlo, y a continuacin se aplicarn las tcnicas a casos
concretos.
Planteamiento del problema
El contacto entre dos cuerpos se produce normalmente en reas de supercie
cuyas dimensiones cambian dependiendo de la fuerza que ejercen los cuerpos entre
s. Estas reas son elipses en el caso de que las dos supercies sean curvas. En muchos
sistemas mecnicos existe un predominio de las deformaciones estructurales frente
a las deformaciones superciales en los puntos en contacto, con lo que a la hora de
5.3. Clculo mecnico de amarres 69
estimar la energa del sistema, se pueden despreciar las deformaciones locales frente
a las estructurales.
El problema queda reducido a calcular la distribucin de fuerzas entre los distin-
tos puntos de contacto entre dos cuerpos. Habitualmente se conoce la fuerza total
que dos cuerpos estn ejerciendo entre s, esta fuerza se distribuir entre los dis-
tintos puntos de la lnea de contacto de forma que la energa total de deformacin
elstica sea mnima.
La obtencin de la distribucin de carga pasara por desarrollar una expresin de
la energa de deformacin del sistema y minimizarla, obteniendo el reparto de carga
entre los distintos puntos de discretizacin. Aqu se ha seguido este procedimiento
utilizando el mtodo de las condiciones de Kuhn-Tcker, y otro distinto pero ms
conocido como el de los multiplicadores de Lagrange. Por los dos mtodos se llega a
la misma ecuacin matricial a partir de la cual se puede despejar de forma directa
el vector de fuerzas. El desarrollo de estos mtodos se puede estudiar en [?], aunque
un resumen viene dado en el Apndice II.
A partir de la ecuacin matricial se puede trabajar con ella para resolver un am-
plio rango de problemas de contacto. Este apartado se ha dividido en las siguientes
secciones:
Obtencin de una expresin de la energa de deformacin de un sistema for-
mado por dos cuerpos con varios puntos en contacto y la formulacin de este
problema en forma matemtica.
Utilizacin de una expresin matricial, con la que se obtiene directamente la
distribucin de fuerzas.
Demostracin de su utilidad mediante la resolucin de un problema de reparto
de carga en la sujecin de una pieza en una mquina herramienta mientras se
mecaniza.
Energa de deformacin en el contacto entre dos cuerpos elsticos
Energa de deformacin de un cuerpo cargado
Se puede suponer que el comportamiento elstico es lineal, es decir, la magni-
tud de los desplazamientos y las tensiones en cada punto son proporcionales a la
carga aplicada. Esta nueva suposicin implica que el material es elstico y que las
deformaciones son pequeas.
La energa de deformacin U es funcin cuadrtica de la fuerza aplicada, F
i
, y
la rigidez del elemento mecnico, k
i
(Apndice II).
U =
1
2
F
2
i
k(x) (5.36)
Energa de deformacin de 2 cuerpos en contacto en un solo punto
Si dos vigas contactan en un punto y en ese punto actan la una contra la otra
con una fuerza unidad, tal como se muestra en la Figura 8.2, los desplazamientos
70 Captulo 5. Diseo y anlisis de utillajes de amarre
Figura 5.8: Evolucin de la rigidez conjunta en funcin de la localizacin del punto
de contacto
en ambas vigas vendrn dados por la rigidez de cada una. La suma de ambos
desplazamientos dar como resultado la rigidez del par de vigas.
La Figura 5.8 muestra cmo evoluciona la energa de deformacin total para una
carga unidad, cuando vara la posicin del punto de contacto. Su forma coincide con
la de la suma de las rigideces de ambos cuerpos cuando estn en contacto en un
slo punto. La energa total de deformacin ser por lo tanto igual a la suma de
las energas de deformacin de los dos cuerpos, y se denomina habitualmente como
rigidez de contacto. Esta energa ser:
U =
1
2
(F
i
1
+F
i
2
) =
1
2
F
i
2
(k
1
(x) +k
2
(h x)) (5.37)
Donde
1
y
2
son las echas respectivas en los puntos de contacto.
Energa de deformacin de dos cuerpos con varios puntos en contacto
Cuando el contacto entre los cuerpos se produce en dos puntos, la energa ya
no depende nicamente de las propias rigideces, pues el desplazamientos del punto
donde acta una fuerza tambin depende del valor del esfuerzo aplicado en el otro
punto. A la echa de la viga en el punto x cuando acta una fuerza unidad en el
punto x
i
se le va a llamar (x, x
i
).
Cuando actan dos fuerzas sobre una viga, F
1
en x
1
y F
2
en x
2
, el desplazamiento
total en x
1
y en x
2
ser:
T1
= F
1
(x
1
, x
1
) +F
2
(x
1
, x
2
)
T2
= F
1
(x
2
, x
1
) +F
2
(x
2
, x
2
)
(5.38)
Si el contacto se produce en dos puntos, a partir del valor de las fuerzas aplicadas,
se podr obtener la expresin de la energa total de deformacin de la viga U
1
2U
1
= F
1
(F
1
1
(x
1
, x
1
) +F
2
1
(x
1
, x
2
)) +F
2
(F
1
1
(x
2
, x
1
) +F
2
1
(x
2
, x
2
)) (5.39)
Donde el subndice 1 de U
1
y
1
denota el cuerpo 1.
5.3. Clculo mecnico de amarres 71
La ecuacin (5.39) se puede expresar de forma ms clara utilizando la notacin
matricial:
2U
1
= [F
1
F
2
]
_
1
(x
1
, x
1
)
1
(x
1
, x
2
)
1
(x
2
, x
1
)
1
(x
2
, x
2
)
_ _
F
1
F
2
_
(5.40)
Cuando los dos cuerpos estn en contacto en dos puntos, la energa total de
deformacin es igual a la energa de deformacin de un cuerpo ms la del otro.
Teniendo en cuenta que:
F
1
y F
2
son iguales para los dos cuerpos por el principio de Newton de accin-
reaccin.
Si la ecuacin de la elstica de la segunda viga
2
, (,
i
) viene expresada en
coordenadas locales , se realizar un cambio de coordenadas para expresarla
en las mismas coordenadas que
1
, que se tomarn como coordenadas globa-
les, con lo que se podr operar con las dos elsticas en el mismo sistema de
referencia.
La energa total de deformacin ser:
U = U
1
+U
2
=
1
2
[F
1
F
2
]
_
1
(x
1
, x
1
) +
2
(x
1
, x
1
)
1
(x
1
, x
2
) +
2
(x
1
, x
2
)
1
(x
2
, x
1
) +
2
(x
2
, x
1
)
1
(x
2
, x
2
) +
2
(x
2
, x
2
)
_ _
F
1
F
2
_
(5.41)
lo que se suele expresar de forma ms simplicada
U =
1
2
[F
1
F
2
]
_
c
11
c
12
c
21
c
22
_ _
F
1
F
2
_
(5.42)
y generalizando para muchos puntos en contacto
U =
1
2
[F]
T
[C][F] (5.43)
en donde
c
ij
=
k
(x
i
, x
j
) ; k = 1, 2 (5.44)
En este punto cabe hacer dos observaciones:
Por el teorema de reciprocidad de Raleigh-Betti se tiene que c
ij
= c
ji
, con lo
que la matriz de coecientes es simtrica.
Si se admite que el desplazamiento de cada punto se produce nicamente por la
fuerza que acta en dicho punto, la matriz [C] (matriz de los desplazamientos)
es diagonal, por lo que no hace falta el conocimiento de la elstica en cada
estado de carga para la elaboracin de [C], sino nicamente de la rigidez de
cada punto.
72 Captulo 5. Diseo y anlisis de utillajes de amarre
Por el principio de mnima energa, la conguracin nal de tensiones y defor-
maciones de un sistema ser tal que su energa interna alcance un valor mnimo
estacionario; ya que, en virtud el teorema de Menabrea, un sistema hiperestti-
co adquiere la conguracin nal de fuerzas y deformaciones que haga mnima la
energa de deformacin elstica.
De acuerdo con ello, en el caso del contacto entre dos cuerpos elsticos en varios
puntos, el vector de fuerzas se puede hallar minimizando la funcin de energa U,
sujeta a las restricciones de que la fuerza total es igual al valor dado, y que no existe
adhesin entre las supercies, y por lo tanto, todas las fuerzas deben ser positivas.
La formulacin matemtica del problema tendra el siguiente enunciado:
Minimizar
j
f
i
c
ij
f
j
f
i
= F (a)
f
i
0 (b)
i = 1 . . . n
(5.45)
Las incgnitas de este problema son las fuerzas puntuales f
i
. La restriccin (a) de
la Ecuacin (5.45) se deduce de que la fuerza total con que acta un cuerpo contra
otro F es un dato de partida, y que las fuerzas puntuales tienen todas la misma
direccin. La restriccin (b) de la Ecuacin (5.45) se basa en que en el contacto no
hay fuerzas de adhesin o traccin, ya que antes de que hubiera traccin dejara de
haber contacto.
La formulacin del problema se ha realizado considerando dos slidos con varios
puntos en contacto, aunque en realidad se tratan de reas de contacto. En el caso de
elementos transmisores de potencia como engranajes, tornillos, etc., estas reas se
simplican por lneas de contacto cuando hay una dimensin que predomina sobre
la otra, y a su vez, se pueden discretizar estas lneas de contacto en una sucesin de
cargas puntuales con el n de simplicar los clculos.
Mtodo matricial solucin del problema
Las soluciones al reparto de carga dadas por las condiciones de Kuhn-Tcker y
por los Multiplicadores de Lagrange vienen expresadas en (5.81) del apndice II, y
tienen su forma matricial del siguiente modo:
_
_
1 1 . . . 1 1 0
2c
11
c
12
. . . c
1(n1)
c
1n
1
c
21
2c
22
. . . . . . . . . . . . c
2n
1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
c
n1
. . . . . . . . . . . . . . . . . . 2c
nn
1
_
_
_
_
f
1
f
2
f
3
. . .
v
_
_
=
_
_
F
0
0
. . .
0
_
_
(5.46)
En donde v es un multiplicador de Lagrange al que no se le ha encontrado ningn
signicado fsico.
5.3. Clculo mecnico de amarres 73
La matriz cuadrada de la ecuacin 5.46 se obtiene directamente a partir de la
matriz de desplazamientos [C], aadiendo la primera la y la ltima columna, y
multiplicando por dos los trminos de la diagonal principal. En adelante, se le va
a llamar matriz de desplazamientos modicada [C
], y tiene unas dimensiones de
(n + 1) (n + 1).
De la expresin (5.46) se puede despejar el vector de fuerzas f
i
, invirtiendo la
matriz de desplazamientos modicada [C
]. El sistema de ecuaciones no es homo-
gneo y la matriz diagonalizable, con lo que la solucin consistente en el vector de
fuerzas f
i
ser nica.
Para la obtencin de los valores de la matriz de los desplazamientos [C] se puede
recurrir a un mtodo analtico o al Mtodo de los Elementos Finitos (MEF). Es-
te ltimo mtodo se puede aplicar directamente, modelizando simultneamente los
dos componentes en contacto mediante los elementos de contacto, de los que suelen
disponer los distintos cdigos, pero esto requiere una gran capacidad computacional
y mucho tiempo de clculo, pues el problema del contacto no es lineal. Otra posibi-
lidad es utilizar el MEF para hallar la matriz de los desplazamientos de cada uno de
los elementos, solucionando los dos problemas correspondientes a los dos slidos en
contacto por separado. Se combinan ambas matrices y se opera para obtener la ma-
triz de los desplazamientos modicada [C
], pudiendo a partir de la Ecuacin (5.46)
obtener directamente el vector de fuerzas f
i
sin necesidad de recurrir a elementos
no lineales de contacto, y consiguiendo una mayor precisin al haber resuelto cada
uno de los elementos por separado, permitiendo usar un mallado mucho ms no en
cada caso. Un ejemplo de aplicacin de esta metodologa se puede estudiar en [?].
El vector solucin de la ecuacin (5.46) es la primera columna de la inversa de
la matriz de coecientes multiplicado por F.
El mtodo presentado es simple y econmico pues:
La restriccin slo aumenta la matriz nal en una la y una columna.
Slo se necesita el clculo de una columna de la matriz inversa. Esto evita una
gran cantidad de operaciones al ordenador.
Por el mtodo de diagonalizacin de Gauss-Jordan, el aumento de la matriz
complementaria sera slo en una columna con el valor F en la primera la y cero
en el resto, en lugar de aadir tantas como las hay en la matriz original. Con
esto se tienen n
2
(n 1) operaciones algebraicas menos que usando el mtodo de
diagonalizacin completo, siendo n la dimensin de la matriz a invertir [?].
Cuando se tienen diferentes zonas de contacto cuyos desplazamientos son in-
dependientes entre s (muy frecuente en el caso de utillajes), la matriz [C
] tiene
muchos ceros, pues el desplazamiento producido en los puntos de una zona de con-
tacto no inuye en el desplazamiento de otra. Las ecuaciones matriciales tendran
74 Captulo 5. Diseo y anlisis de utillajes de amarre
una forma como la que sigue:
_
_
1 1 . . . 1 0
[C]
1
0 . . . 0 1
0 [C]
2
. . . 0 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
0 . . . . . . . . . [C]
N
1
_
_
_
_
{f}
1
{f}
2
. . .
{f}
N
v
_
_
=
_
_
F
0
0
. . .
0
_
_
(5.47)
Siendo [C]
1
, [C]
2
,. . . [C]
N
, las matrices de desplazamiento correspondientes a
cada zona de contacto, con la diagonal duplicada.
Cuando la matriz de los desplazamientos [C] es diagonal (c
ij
= 0 cuando i = j),
de la ecuacin (5.46) se obtiene el siguiente sistema de ecuaciones:
v =
2F
i
1
c
ii
f
i
=
1
c
ii
j
1
c
jj
F
(5.48)
De esta ltima expresin se deduce que cuanto menor es c
ii
mayor es la fuerza
soportada por el punto i, por lo que se podra decir que en la lnea de contacto entre
dos cuerpos cuya evolucin de la rigidez tiene el mnimo en un punto intermedio
(como la lnea discontinua de la Figura 5.8), la distribucin de la fuerza tendr un
mximo en el punto donde estaba el mnimo de rigidez conjunta.
Ejemplo de aplicacin a la sujecin de un cilindro con bloques en V
El ejemplo a estudiar consistir calcular la distribucin de fuerzas a lo largo de
la lnea de contacto entre el el cilindro y el bloque en V en posicin esttica. Para
ello se estiman en 10 los puntos de contacto entre el bloque y el cilindro, se calcula la
matriz de rigidez a exin del cilindro y la de rigidez a contacto del bloque. Una vez
conocida la fuerza total se aplica la frmula y se obtiene la distribucin de fuerzas
discretizada a lo largo del bloque y del cilindro. stos sern lo datos a aplicar en el
anlisis de las tensiones de contacto.
Una vez calculada las reacciones en lo bloques en V, se tratara de ver cmo se
distribuyen a lo largo de la lnea de apoyo. De lo dos bloques en V se estudiar el
que est ms cercano al apriete porque presenta un valor mayor.
El esfuerzo normal en cada cara de contacto del bloque ser igual a la reaccin
R
1
multiplicado por el seno de la mitad del ngulo, sin embargo se proceder al
clculo de la viga a exin, luego se combinar con la rigidez de contacto en el
bloque, para despus aplicar el mtodo propuesto anteriormente y determinar la
distribucin de carga.
Rigidez de contacto en una zona del cilindro
Para calcular la rigidez de cada punto de contacto del cilindro con el bloque en
V, se va a aplicar la teora general de exin de vigas, segn la conguracin que
5.3. Clculo mecnico de amarres 75
Q
R
2
F
i
l
2 l
1
M
d
d
x
q
Figura 5.9: Conguracin de deformacin del cilindro
aparece representada en la gura 5.9 con su diagrama de momentos y su deformada,
en la cual se tiene que una fuerza unidad en un punto i y produce unas reacciones
en el punto de apriete Q, y en el otro apoye en el bloque R
2
.
La deformacin que se obtiene en el punto i y los que estn a la derecha de ste,
se determina mediante el segundo teorema de Mohr. La funcin de momentos en
funcin de x ser:
M(x) =
_
R
2
x si x < l
1
R
2
x Q(x l
1
) si l
1
< x < l
2
(5.49)
La lnea tangente por el apoyo en Q ser
q
=
_
l
1
0
s
R
2
s
EI
n
ds =
R
2
l
3
1
3EI
n
(5.50)
76 Captulo 5. Diseo y anlisis de utillajes de amarre
siendo E el mdulo de Young e I
n
el momento de inercia de la seccin circular que
tiene un valor de
I
n
=
R
4
4
(5.51)
siendo R el radio del cilindro.
El valor de la echa
j
en un punto j situado a la izquierda de Q y a la derecha
de i, se calcular restando a la tangente obtenida la parte proporcional de
q
. con
lo que se obtiene:
(x) =
_
l
1
0
s
R
2
s
EI
n
ds +
_
x
l
1
s
R
2
s Q(s l
1
)
EI
n
ds
q
l
2
+l
1
l
1
=
1
EI
n
_
(R
2
Q)
x
3
3
+Ql
1
_
l
2
1
6
x
2
2
__
q
_
l
2
l
1
+ 1
_
(5.52)
Para la echa en los puntos que estn a la izquierda de i, la viga no est deforma-
da en este tramo pero s que est inclinada con el mismo ngulo que tiene el punto
i. Este ngulo se puede obtener a partir del primer teorema de Mohr, sabiendo que
el punto ms bajo de la viga
x
0
=
_
l
1
3
(l
1
+ 2l
2
) (5.53)
por el primer teorema de Mohr, el ngulo
i
ser
i
=
_
x
x
0
M(s)
EI
n
ds
=
1
EI
n
_
R
2
_
l
2
1
x
2
0
2
_
+ (r
2
Q)
_
x
2
l
2
1
2
_
+Ql
2
(x l
2
)
_ (5.54)
con lo que la deformada en cualquier punto j a la izquierda de i ser:
j
=
y
(x
j
x
i
) tan
i
(5.55)
Rigidez de contacto del bloque en V
La misma fuerza que se aplica al cilindro es la reaccin del bloque, con la pecu-
laridad de que la reaccin se produce en las dos caras del bloque. El desplazamiento
ante una fuerza unidad vertical en el bloque se traducir en un desplazamiento
normal en cada una de las caras. Se ha recomendado que la rigidez normal de con-
tacto (la inversa a este desplazamiento), se calcule como si el desplazamiento se
produciera al contacto de una esfera de radio igual a la distancia entre puntos de
discretizacin. De esta forma la matriz de deformacin queda muy diagonal, por lo
que se pueden despreciar todos los dems trminos.
El valor de esta rigidez normal multiplicado por el semingulo del bloque en V
ser el tomado para el clculo de la matriz de deformacin combinada.
Solucin a un caso concreto
Se presenta ahora la distribucin de carga obtenida para el caso de los siguientes
valores numricos:
5.4. Anlisis de las tensiones de contacto 77
0
50
100
150
200
250
300
350
140 145 150 155 160
coordenadas x, mm
P
r
e
s
i
n
m
e
d
i
a
,
N
/
m
m
.
Figura 5.10: Reparto de carga a lo largo de la lnea de contacto con el bloque en V
l
1
= 100 mm distancia entre un apoyo y el apriete
l
20
= 40 mm distancia al primer punto de contacto
W = 20 mm ancho bloque en V a partir del punto l
1
+l
20
n = 10 n.
o
de puntos de discretizacin
R = 15 mm radio del eje
E = 2, 00E + 05 N/mm
2
mdulo de Young
I
n
= 7, 85E + 03 mm
4
momento de inercia
= 90
ngulo del bloque
Con estos datos el reparto de carga para un valor de R
1
= 5000 N viene repre-
sentada en la grca siguiente:
Teniendo en cuenta que la presin media sera de 250 N/mm, se ha obtenido que
la mxima presin de contacto es de 328 N/mm, lo que es sustancialmente superior.
5.4. Anlisis de las tensiones de contacto
En este apartado del tema, se va a tratar de analizar el utillaje desde el punto
de vista del contacto mecnico, de forma que sin utilizar almohadillas (las cuales
78 Captulo 5. Diseo y anlisis de utillajes de amarre
introducen imprecisiones dimensionales y tiempos de preparacin de amarres eleva-
dos), la fuerza de reaccin del punto localizador no dae la pieza. Para ello a partir
de las ecuaciones fundamentales de la mecnica del contacto que se muestran en
el Apndice III se van a mostrar sus soluciones para los casos ms comunes, que
incluye el contacto de un apoyo plano, una punta cilndrica, una punta esfrica, el
contacto con rozamiento, y la inuencia de la rugosidad supercial.
Despus de obtener las distribuciones de presiones, se desarrollar un mtodo
numrico para la determinacin del mapa tensional determinando el cortante mxi-
mo y el inicio de uencia de la pieza. De este apartado se deducir la fuerza mxima
a aplicar en el punto para que el utillaje no dae la pieza por la sujecin, lo que se
traducir en unos pares de apriete mximos en los tornillos de jacin.
5.4.1. Distribucin de presiones entre supercies en contacto
para distintas geometras
Contacto de apoyo plano con aristas con supercie elstica
El primer caso que se va a estudiar es el de un apoyo rgido con aristas vivas,
presionando sobre la supercie de la pieza elstica. Como se observa en la gura
5.11 la distribucin de presiones que origina se hace innito en los bordes segn la
ecuacin:
p(x) =
P
(a
2
x
2
)
(5.56)
En realidad, ni el apoyo es tan rgido, ni el material tan elstico que no deforme
plsticamente en los bordes del contacto. Por esto se ha de tener en cuenta las
constantes elsticas de los dos materiales para determinar si se daa o no la pieza.
Esto fue estudiado por Dundurs tambin para el caso en que el ngulo de arista
sea distinto de 90
tal como aparece en la gura 5.12 (como cuando una arista est
matada con un chan de 45
.
En este caso se establece un parmetro que tiene en cuenta las constantes
elsticas de los dos materiales y se denomina constante de Dundurs:
=
1
1
G
1
1
2
G
2
1
1
G
1
+
1
2
G
2
(5.57)
El valor de este parmetro est entre 1 (apoyo rgido y plano elstico) y +1
(apoyo elstico y plano rgido). Para que la tensin sea nita en el borde se debe
cumplir que:
( +) cos + ( 1) sen
( ) cos + ( + 1) sen
(5.58)
se puede observar que cuanto mayor es , ms rgido es el apoyo por lo que ms
fcil es que la pieza resulte daada. Por eso es peligroso matar la arista con chan
desde el punto de vista del dao de la pieza.
5.4. Anlisis de las tensiones de contacto 79
O
P
Q
a
a
A
r
q
z
x
0
p(x)
1.0
0 1.0 -1.0
x/a
Figura 5.11: Indentacin de un apoyo rgido plano sobre una supercie elstica, y
su distribucin de presiones
G , 2 2 n
G , 1 1 n
q
Figura 5.12: Borde del contacto de un apoyo con arista viva
80 Captulo 5. Diseo y anlisis de utillajes de amarre
En el caso de que la arista se mate con redondeo, la presin de contacto en los
bordes tambin es muy elevada siempre dependiendo de las constantes elsticas de
los materiales y del radio de curvatura del redondeo. Este caso est todava bajo
estudio.
Para evitar estos tipos de problemas, normalmente se preeren los contactos en
los que el rea de contacto es progresiva con la fuerza aplicada, como en el contacto
entre supercies curvas, de esta formase evitan las fuertes discontinuidades en los
bordes del contacto.
Contacto hertziano
El caso de contacto entre supercies curvas cuando el semiancho de contacto
es muy pequeo respecto al radio de curvatura de las supercies es el denominado
contacto hertziano, dado que las primeras soluciones fueron propuestas por Rudolph
Hertz a nales del siglo pasado.
En el Apndice V se muestra una solucin sencilla para el problema del contacto
hertziano en el caso bidimensional de contacto entre un cilindro de radio R y una
supercie plana, ambos con las mismas contantes elsticas. As, el semiancho de
contacto es:
a =
_
4RP
E
(5.59)
La forma del perl de presiones ser elptica:
p(x) =
2P
a
2
_
a
2
x
2
(5.60)
La mxima presin sobre la supercie ser entonces:
p
0
=
_
PE
R
(5.61)
Este caso se puede generalizar al caso en el que contacten dos supercies con
radios de curvatura R
1
y R
2
, estableciendo el radio de contacto equivalente R:
1
R
=
1
R
1
+
1
R
2
(5.62)
Del mismo modo se puede establecer un mdulo de Young equivalente en funcin
de las constantes elsticas de las supercies de contacto:
1
E
=
1
2
1
E
1
+
1
2
2
E
2
(5.63)
5.4. Anlisis de las tensiones de contacto 81
De un modo algo distinto se pueden determinar las mismas variables en el caso
de contacto entre esferas de modo que quedaran las siguientes expresiones:
a =
_
3PR
4E
_
1/3
p
0
=
_
3P
2a
2
_
=
a
2
R
(5.64)
es la aproximacin entre puntos distantes, que en el caso tridimensional no es
una indeterminacin como en el bidimensional.
Distribucin de presiones normales y tangenciales en contacto con desli-
zamiento parcial
En el contacto en el que no hay deslizamiento global Q P, lo cual es lo
deseable en la sujecin de piezas, la zona de contacto no puede estar totalmente
adherida pues la tensin alcanzada en los extremos sera innita debido a que la
distribucin de presiones tangenciales obtenida de la integracin de las ecuaciones
tendra la siguiente representacin:
q(x) =
Q
(a
2
x
2
)
(5.65)
Por esto en la zona de contacto, hay una zona central adherida y la zona cercana
a los extremos desliza parcialmente segn se puede apreciar en la gura 5.13. Por
analoga a la distribucin de Hertz el desplazamiento en x es parablico en la zona
deslizante, y en la zona adherida se le ha de restar una distribucin tangencial de
forma que el desplazamiento total en esta zona sea nulo. Si la zona adherida tiene
un semiancho c, la distribucin de presiones tangenciales en esta zona ser:
q(x) =
p
o
a
_
_
a
2
x
2
_
c
2
x
2
_
(5.66)
Para que el valor de la fuerza tangencial total sea Q, el semiancho de la zona
adherida en el caso plano ser:
c
a
=
1
Q
P
(5.67)
En el caso del contacto de una esfera contra un plano se obtiene una relacin
similar:
c
a
=
3
1
Q
P
(5.68)
82 Captulo 5. Diseo y anlisis de utillajes de amarre
T1
T2
P
P
ux1
ux2
sx1
sx2
A2
A1
a a
Q
Q
O
dx2 dx2
dx1
dx1
Figura 5.13: Deslizamiento parcial en el contacto
5.4. Anlisis de las tensiones de contacto 83
0,00E+00
2,00E+07
4,00E+07
6,00E+07
8,00E+07
1,00E+08
1,20E+08
-3,E-05 -2,E-05 -1,E-05 0,E+00 1,E-05 2,E-05 3,E-05
Semiancho (m)
P
r
e
s
i
n
(
N
/
m
2
)
p(r)
q(r)
Figura 5.14: Distribucin de presiones normales y tangenciales para R = 30 mm,
P = 5000 N/m, Q = 1200 N/m y = 0,3.
y en este caso se conoce adems el calor del desplazamiento de la zona adherida:
x
=
3P
8a
_
2
G
_
_
1
_
1
Q
P
_
2/3
_
(5.69)
Este tipo de contacto es muy frecuente en utillajes, pero debido a que los coe-
cientes de friccin son muy pequeos del orden de = 0,1 0,3 el semiancho de
contacto adherido c es muy elevado y el valor de la tensin tangencial bajo, por
lo que la fuerza tangencial apenas inuye en el fallo la uencia plstica que ocurre
mayormente en la subsupercie.
La gura 5.14 muestra un caso de contacto cilndrico el el cual se puede apreciar
la discontinuidad en la fuerza de rozamiento que seala las zonas de deslizamiento
en los extremos y la de adhesin en la parte central.
Adems, las fuerzas normales suelen ser mucho mayores que las tangenciales en
las sujeciones, sin llegar al lmite de rozamiento. Para ello las fuerzas de apriete
llevan un pretensado que proporciona una fuerza normal inicial que evite por todos
los medios que la fuerza tangencial Q llegue a su lmite P.
Cuando la carga Q es oscilante, ocurre que sin perder la adhesin en la zona
central, los extremos estn continuamente deslizando produciendo un desgaste deno-
minado fretting. Este tipo de desgaste es muy probable que se presente en el amarre
84 Captulo 5. Diseo y anlisis de utillajes de amarre
de piezas. Para evitarlo conviene que las fuerzas normales debido a los aprietes sea
mucho mayor que los esfuerzos tangenciales que puedan producirse.
Inuencia de la rugosidad supercial en la distribucin de presiones
Se ha de tener en cuenta en muchos casos que las supercies de la pieza y el
utillaje con el que entra en contacto tienen una rugosidad supercial cuya altura
suele ser del orden de magnitud del semiancho de contacto de Hertz, por lo tanto
se ha de conocer la inuencia de esa rugosidad supercial de ambas supercies en
el perl de presiones nal, que afectar tanto al marcado sobre la pieza como en el
posible inicio de grieta de fatiga. Formas de determinar la rugosidad supercial y su
inuencia en el fallo de lo que aq se incluye un pequeo esbozo se puede estudiar
con ms profundidad en [?].
El parmetro ms usado para estimar la calidad del acabado supercial es la
desviacin tpica
s
de la rugosidad supercial dada por el perl de alturas del
rugosmetro (en la literatura anglosajona root mean squarerms).
El parmetro normalizado para estimar la rugosidad supercial es la media de
las alturas de los picos R
a
pero como los rugosmetros actuales tienen salida digital,
el clculo de la desviacin tpica no entraa mucha dicultad, y es un parmetro
mucho ms repetitivo que el de la media R
a
. La calidad de los engranajes suele
venir expresado en funcin de los valores de la desviacin tpica.
El perl dado por el rugosmetro se toma perpendicular a las lneas de contacto,
pues es la direccin en la que se va a analizar el contacto plano. Para estimar
la inuencia de la rugosidad supercial en las tensiones superciales cuando dos
dientes entran en contacto, se va a tomar el modelo de Greenwood y Williamson de
caracterizacin de supercies [?]. Este modelo supone que la distribucin de alturas
de la supercie es normal y toma los siguientes parmetros:
s
desviacin tpica de la altura de la rugosidad
s
curvatura de los picos
s
densidad de picos (n.
o
de picos por unidad de rea)
Para la obtencin de estos parmetros en supercies reales se parte del perl
de la supercie dado por el rugosmetro. Este perl es bidimensional, es una curva
tomada en una longitud L que es la unin de los datos de las alturas z
i
tomadas
a intervalos de h. A partir de las alturas z
i
del rugosmetro se pueden calcular los
siguientes datos en cada punto registrado:
pendiente m
i
=
z
i+1
z
i
h
curvatura k
i
=
z
i+1
2z
i
+z
i1
h
2
densidad de picos
p
dados en la curva del rugosmetro por unidad de longitud
(5.70)
5.4. Anlisis de las tensiones de contacto 85
Las series de datos anteriores (z
i
, m
i
, k
i
) tienen sus respectivas desviaciones tpi-
cas
s
,
m
y
k
. Los dos ltimos parmetros son muy sensibles al intervalo h cuando
ste se toma del orden de la distancia que hay entre picos. Las caractersticas de
la topografa de la supercie rugosa se pueden estimar a partir de los datos del
rugosmetro de la siguiente manera:
s
k
s
p
(5.71)
Para esta ltima suposicin se ha tenido en cuenta que las estras de la rugosidad
supercial tienen el sentido perpendicular al plano del rugosmetro por lo que el
nmero de picos en ese sentido es despreciable frente a los aparecidos en la curva
origen. En el caso en el que la densidad de picos fuera igual en ambos sentidos, el
valor de
s
sera estimado mejor por el de
p
. Tambin se ha supuesto que la curva
del rugosmetro detecte todos los picos al ser h lo sucientemente pequeo.
El contacto entre dos supercies rugosas, a efectos del estado de presiones y
semiancho de contacto, se puede asemejar al sistema formado por una supercie
plana rgida y una supercie con las siguientes caractersticas elsticas, geomtricas
y superciales:
E =
1
1
2
1
E
1
+
1
2
2
E2
R =
1
1
R
1
+
1
R
2
(5.72)
s
=
_
2
s1
+
2
s2
;
s
=
1
1
s1
+
1
s2
;
s
=
s1
+
s2
(5.73)
En el anlisis de las tensiones de contacto se va a suponer que las asperezas no
se deforman plsticamente, y tienen una distribucin gaussiana de alturas, que es
la ms comn en los procesos descritos. Se ha observado experimentalmente que la
rugosidad supercial tiene dos efectos principales sobre la distribucin de presiones
de Hertz como se puede apreciar tambin en la Figura 5.15:
Disminuye el pico de presiones
Aumenta el ancho efectivo de contacto
La suma de estos dos efectos se traduce en que la tensin tangencial mxima
subsupercial disminuye y aumenta la profundidad a la que ocurre debido al au-
mento del ancho efectivo de contacto a
. Ambos efectos son beneciosos desde el
punto de vista de resistencia a fatiga cuando la grieta tiene comienzo en la subsu-
percie. Dos parmetros adimensionales en funcin de los cuales se puede expresar
tanto la variacin de la presin mxima de contacto, como el semiancho efectivo de
contacto, han sido denidos por K. L. Johnson [?]:
86 Captulo 5. Diseo y anlisis de utillajes de amarre
0,0E+00
2,0E+08
4,0E+08
6,0E+08
8,0E+08
1,0E+09
1,2E+09
1,4E+09
0 0,0001 0,0002 0,0003 0,0004 0,0005
Radio de contacto, m
P
r
e
s
i
n
d
e
c
o
n
t
a
c
t
o
,
N
/
m
2
Presin Hertz Presin con rugosidad
Figura 5.15: Inuencia de la rugosidad supercial en la distribucin de presiones de
Hertz
5.4. Anlisis de las tensiones de contacto 87
=
_
16RE
9P
2
_1
3
=
8
3
s
_
2R
s
_1
2
(5.74)
A partir de las representaciones grcas de estos parmetros [?] se han obtenido
la siguiente correlacin lineal:
p(0)
p
0
= 0,924251 057377 + 0,004063 (5.75)
Los errores obtenidos mediante esta correlacin son menores del 5 % para el caso
de la relacin de presiones, y del 1 % para la relacin de semianchos de contacto. Se
pueden considerar vlidas para un rango de valores de a entre 0.05 y 1, y para un
rango de valores de entre 4 y 17.
Se puede observar en la correlacin que el parmetro ms inuyente con dife-
rencia es
s
, mientras que las caractersticas topogrcas de
s
y
s
tienen una in-
uencia mucho menor. De las expresiones anteriores se deduce que si a
/a
0
< 0,05
se puede despreciar la inuencia de la rugosidad supercial en la distribucin de
presiones sobre las supercies.
Casos tpicos de sujecin
La forma de analizar los apoyos es asemejando los apoyos a los casos vistos:
Agarres con tornillo: Estos tornillos llevan por lo general punta esfrica con
un radio de curvatura elevado.
Agarres de levas: Se tratan como contacto entre supercie cilndrica (la leva
con un radio de curvatura que le corresponda en el punto de contacto) y plana.
Apoyo de ejes en bloques en V: se tratan como contacto entre supercie ciln-
drica y supercie plana, la longitud de contacto ser la del bloque en V.
Garra de friccin: muy usado en los tornos, se debe tratar como una sucesin
de contactos esfricos concatenados que se reparten la carga segn la rigidez
de cada punta. Aqu se utilizaran los mtodos utilizados en la seccin 5.3.3.
. . .
5.4.2. Determinacin del dao en la pieza
Una vez determinado el esfuerzo que acta sobre la supercie de contacto, se
ha de conocer el estado tensional del punto ms crtico para prever si va a quedar
daada la pieza despus de realizar la operacin.
88 Captulo 5. Diseo y anlisis de utillajes de amarre
La supercie de la pieza queda daada si algn punto de la supercie o de la
subsupercie uye plsticamente. Si el volumen de material deformado plstica-
mente aora a la supercie el dao ser visible, pero si el volumen permanece en
la subsupercie, quedando encerrado dentro de material deformado elsticamente,
el dao no ser visible pero el material quedar con unas tensiones residuales que
pueden disminuir sus prestaciones en servicio. De todas formas en muchos casos
los requisitos de calidad exigen simplemente de este dao no haya aorado a la
supercie por tener sta una simple funcin esttica.
En el contacto elstico hertziano, el material empieza a uir plsticamente en la
subsupercie cuando se alcanzan ciertos lmites en la tensin cortante equivalente
(criterio de Tresca) o en la energa de deformacin(criterio de von Misses).
En el caso de contacto entre cilindros, la mxima tensin tangencial es de 0.3
veces la presin mxima de Hertz p
0
, y se produce a una profundidad de 0.78 veces
el semiancho de contacto a. En el caso de contacto entre esferas, la mxima tensin
tangencial se produce a 0.4 veces el semiancho de contacto.
En ambos casos el material empieza a uir plsticamente pero en un volumen
encerrado por material que slo est deformado elsticamente con lo que el dao
no llega a apreciarse en la supercie, y la pieza supera los controles de calidad.
La supercie llega a deformar plsticamente y por lo tanto el dao empieza a ser
apreciado cuando la presin mxima es 3 veces la tensin de uencia equivalente Y .
Se ha de tener en cuenta que la presencia de tracciones tangenciales, por pe-
queas que stas sean, hacen que la uencia plstica comience mucho ms cerca de
la supercie con lo que el lmite antes sealado se rebaja considerablemente. Para
estudiar este caso y otros como la inuencia de la rugosidad supercial, etc., se
disponen de herramientas para iniciar su estudio y poder determinar el lmite de
esfuerzo sobre la superfcie. Se ha desarrollado para este n un algoritmo numrico
que dibuja mapa tensional en la zona de contacto, y se puede estudiar en [?].
Apndice I: Rigidez de una viga empotrada en un
extremo
Se dene desplazamiento especco K
1
de la viga en un punto P como el des-
plazamiento del punto P donde se aplica la carga y en la direccin de sta cuando
el valor de la misma es la unidad. Si se representa grcamente la K respecto de la
distancia de P al empotramiento, se obtiene una curva creciente K como la mostra-
da en la Figura 5.8. Al ser un material elstico y los desplazamientos pequeos, el
desplazamiento en un punto ser proporcional a la carga aplicada, pues se trabaja
dentro del mbito lineal.
= F
i
k(x) (5.76)
La energa de deformacin de la viga ser igual al producto de la fuerza por el
desplazamiento en el punto de aplicacin de la carga, y dividido por dos si se supone
el procesos de aplicacin es cuasiesttico, con lo que al sustituir la Ecuacin (5.76)
5.4. Anlisis de las tensiones de contacto 89
Figura 5.16: Sistema de dos cuerpos elsticos con un punto en contacto
resulta que la energa de deformacin U es funcin cuadrtica de la fuerza aplicada.
U =
1
2
F
i
=
1
2
F
i
F
i
k(x) (5.77)
Si dos vigas contactan en un punto y en ese punto actan la una contra la otra
con una fuerza unidad, tal como se muestra en la Figura 8.2, los desplazamientos
en ambas vigas vendrn dados por la rigidez de cada una. La suma de ambos
desplazamientos dar como resultado la rigidez del par de vigas. Al venir las rigideces
en funcin de la distancia desde el punto de carga hasta el empotramiento, en una
de las vigas se har una traslacin del origen de coordenadas de forma que la
nomenclatura usada en las expresiones coincida con las entidades de acotacin de
la Figura 8.2.
Apndice II: Mtodos de minimizacin de la energa
de deformacin
Para la resolucin matemtica del problema planteado en la Ecuacin (5.45),
existen varios mtodos. La funcin objetivo es cuadrtica, lo que hace que no se
puedan aplicar las tcnicas de programacin lineal que son las ms extendidas para
resolver problemas de optimizacin. Las rutinas tpicas de programacin cuadrtica
tienen el inconveniente de ser iterativas y laboriosas, y pueden surgir problemas
de convergencia. Tambin existe la posibilidad de linealizar el problema como hizo
Vijayarangan et al. [?] para solucionar el contacto entre cuerpos. Uno de los mtodos
adoptados ha sido el de asemejar el problema al tipicado de Kuhn-Tcker mucho
ms general y sucientemente conocido.
Mtodo de las condiciones de Kuhn-Tcker
El problema sealado anteriormente es equivalente al conocido como problema
de Kuhn-Tcker [?], por lo tanto, sus soluciones son equivalentes y bastar con
90 Captulo 5. Diseo y anlisis de utillajes de amarre
solucionar el problema de Kuhn-Tcker, de carcter ms general, una vez estableci-
das las condiciones de necesidad y suciencia para la equivalencia del problema. El
enunciado del problema de Kuhn-Tcker viene dado, segn la versin de Reklaitis
[?], por la ecuacin siguiente:
Minimizar f(x)
sujeto a g
j
(x) 0 j = 1 . . . J
h
k
(x) = 0 k = 1 . . . K
x = {x
1
, x
2
, . . . , x
N
}
(5.78)
La equivalencia entre este enunciado y (5.45) se hace patente introduciendo en
el problema de Kuhn-Tcker las siguientes sustituciones:
x
i
=f
i
f(x) =U{f} =
i,j
f
i
c
if
f
j
g
i
(x) =f
i
J = N
h
k
(x) =
N
i=1
f
i
F K = 1
(5.79)
Este problema, conforme a la teora de Kuhn-Tcker, equivale a encontrar, ade-
ms del vector x
N1
, los vectores u
1J
, y v
1K
que cumplen las condiciones de las
expresiones (5.80) siguientes, siempre que se cumplan las condiciones de necesidad
y suciencia sealadas en el Apndice II.
f(x)
J
j=1
u
j
g
j
(x)
K
k=1
v
k
h
k
(x) = 0
u
j
g
j
(x) = 0
u
j
0
(5.80)
Haciendo las sustituciones en el problema equivalente y operando las condiciones
(5.80), resulta que las u
i
son nulas, quedando el siguiente sistema de ecuaciones:
2f
i
c
ii
+
j=i
c
ij
f
j
v = 0
i
f
i
F = 0
(5.81)
No se ha encontrado ningn signicado fsico a v, siendo un simple operador
para calcular la solucin.
Al hacer la equivalencia de Kuhn-Tcker han aparecido las variables c
ij
y v,
aumentando el nmero de ecuaciones pero tambin igualando su nmero al nmero
de incgnitas, y eliminando las inecuaciones.
5.4. Anlisis de las tensiones de contacto 91
Lo usual en la solucin de la mayora de los problemas de Kuhn-Tcker es que la
equivalencia no salga tan sencilla lo que obliga, como en los ejemplos presentados por
Reklaitis [?], a solucionarlos por tanteo. Las condiciones de necesidad y suciencia
se verican en este caso, como se aprecia en el Apndice II, lo que signica que la
solucin nica que resuelve el problema es la autntica, es decir, que las f
i
de la
solucin del sistema de ecuaciones (5.81) constituyen la verdadera distribucin de
fuerzas que resuelven el problema entre dos cuerpos en contacto.
Mtodo de los Multiplicadores de Lagrange
Se presenta ahora una versin del problema solucionado por el mtodo de los
Multiplicadores de Lagrange. En el clculo de la distribucin de carga por este
mtodo, el sistema de ecuaciones nal es idntico al que resulta de la formulacin
por las condiciones de Kuhn-Tcker.
Partiendo del problema mostrado en la Ecuacin (5.45) se pueden sustituir las
inecuaciones de la restriccin (b) introduciendo valores a
i
como incgnitas, quedan-
do el problema denido de la forma:
Minimizar
j
f
i
c
ij
f
j
f
i
= F (a)
f
i
a
2
i
= 0 (b)
i = 1 . . . n
(5.82)
Donde con las a
i
se han introducido n variables y n restricciones, eliminando las
inecuaciones. La funcin a minimizar, siguiendo el mtodo de los Multiplicadores
de Lagrange, tendr la forma
U =
n
i=1
n
j=1
f
i
c
ij
f
j
_
n
i=1
f
i
F
_
i=1
i
(f
i
a
2
i
) (5.83)
Siguiendo el mtodo, se procede a hacer estacionaria la funcin U
U
f
i
= 0 = 2f
i
c
ii
+
j=i
c
ij
f
i
i
(5.84)
U
a
i
= 0 = +2
i
a
i
(5.85)
U
i
= 0 = (f
i
a
2
i
) (5.86)
U
= 0 =
_
f
i
F
_
(5.87)
92 Captulo 5. Diseo y anlisis de utillajes de amarre
De (5.85) se deduce que todos los
i
son nulos, con lo que de (5.84) y (5.87)
se obtiene un sistema de n + 1 ecuaciones con n + 1 incgnitas, que proporciona
los valores de f
i
y de . Este sistema de ecuaciones coincide con el proporcionado
por las condiciones de Kuhn-Tcker, obtenido anteriormente, que de igual modo se
puede representar en forma matricial pues las ecuaciones son lineales, con lo que el
sistema que queda es equivalente al dado en la expresin (5.81) con slo sustituir v
por .
Habitualmente, el multiplicador de Lagrange suele tener un signicado fsico
concreto. En este caso, no se ha encontrado, siendo un simple operador necesario
para hallar la solucin del problema.
Se puede percibir que los valores de las f
i
proporcionados por el mtodo de los
Multiplicadores de Lagrange son todos positivos, pues antes de que una fuerza f
i
fuera negativa dejara de haber contacto. Sin embargo, matemticamente podra
ocurrir que a
i
fuera un nmero complejo. Una demostracin intuitiva de que esto
no ocurre es que, para que la energa fuera mnima y la fuerza total sea constante,
una fuerza negativa f
i
supondra que las fuerzas positivas tendran que aumentar,
con lo que la energa del sistema total aumentara, con lo que se incumplira el
principio de mnima energa.
De todas formas, al estar demostrado matemticamente que las condiciones
de Kuhn-Tcker se cumplen, se puede extender esta conclusin al mtodo de los
multiplicadores de Lagrange, pues los resultados son los mismos.
Apndice III: Determinacin de la presin de con-
tacto entre dos cuerpos
A continuacin se va a solucionar el caso plano por ser ms sencillo y fcil de
comprender. Cuando se tiene una distribucin de presiones sobre una supercie
semiindenida, donde no se conocen las tensiones en la subsupercie, la primera
solucin ms intuitiva es su discretizacin en cargas puntuales de las que se conoce
el campo de tensiones producido por cada una de ellas mediante las expresiones
(5.88), segn la Figura 5.17.
r
=
2P
cos
r
= 0 ;
r
= 0
(5.88)
Aplicando la ley de Hooke se pueden determinar las deformaciones las cuales, a
su vez, estn relacionadas con los desplazamientos en las direcciones polares:
r
=
2P(1
2
)
E
cos
r
=
u
r
r
=
2P(1 +)
E
cos
r
=
u
r
r
+
1
r
u
r
= 0 =
1
r
u
r
+
u
r
u
r
(5.89)
5.4. Anlisis de las tensiones de contacto 93
Figura 5.17: Carga puntual sobre una supercie semiindenida
Este sistema de ecuaciones en derivadas parciales es resoluble mediante ciertas
manipulaciones matemticas, que aqu no se van a exponer por razones de espacio,
a nuestros efectos slo nos interesa el valor de los desplazamientos en la supercie
y su relacin don la fuerza aplicada:
( u
r
)
=
2
=
(1 2)(1 +)P
2E
( u
r
)
=
2
=
2P
E
(1
2
) ln r +C
(5.90)
Por la constante C es imposible tener un valor de u
z
por lo que se ha de poner
una condicin de contorno arbitraria. La barra encima de las magnitudes indican
que se reeren a puntos de la supercie del espacio semiinnito.
En el caso de actuar una carga tangencial se tiene el siguiente campo de tensio-
nes:
r
=
2Q
sen
r
= 0 ;
r
= 0
(5.91)
Siguiendo el mismo procedimiento usado anteriormente se obtiene el siguiente
campo de deformaciones:
( u
r
)
=
2
= ( u
r
)
=
2
=
2Q
E
(1
2
) ln r +C
( u
r
)
=
2
=
(1 2)(1 +)Q
2E
(5.92)
Aplicando el principio de superposicin se pueden obtener los desplazamientos
cuando acta una distribucin de presiones normal p(s) y tangencial q(s), de forma
que se obtiene:
u
x
= +
(1 2)(1 +)
2E
__
x
b
p(s)ds
_
a
x
p(s)ds
_
2(1
2
)
E
_
a
b
q(s) ln |x s|ds +C
1
u
z
=
2(1
2
)
E
_
a
b
p(s) ln |x s|ds +
(1 2)(1 +)
2E
__
x
b
q(s)ds
_
a
x
q(s)ds
_
+C
2
(5.93)
94 Captulo 5. Diseo y anlisis de utillajes de amarre
Son integrales que se pueden resolver numricamente a falta de una condicin
de contorno para obtener la constante.
Suelen ser ms tiles sus derivadas:
u
x
x
=
(1 2)(1 +)
2E
p(x)
2(1
2
)
E
_
a
b
q(s)
x s
ds
u
z
x
=
2(1
2
)
E
_
a
b
p(s)
x s
ds +
(1 2)(1 +)
2E
q(x)
(5.94)
La primera parte de esta ecuacin es la deformada supercial
x
, mientras que la
segunda parte representa la pendiente de la supercie tal como queda. Estas ecua-
ciones incluyen en s unas integrales impropias llamadas valores propios de Cauchy
que se pueden solucionar mediante el teorema de los residuos o numricamente
mediante cuadraturas especiales.
Como se disponen de dos ecuaciones y cuatro variables (p(x), q(x), u
x
, u
z
),
habr que restringir dos para obtener las otras dos. De esta forma surgen cuatro
tipos de problemas segn las dos variables conocidas. Entre parntesis se sealan
ejemplos de esos casos.
Tipo I: p(x) y q(x) (distribuciones hidrulicas)
Tipo II: u
z
y q(x) (contacto sin friccin contra un cuerpo rgido q(x) = 0), o
bien u
x
y p(x) (contacto entre supercies que no deslizan u
x
= 0)
Tipo III: u
x
y u
z
(punzn rgido con adhesin u
x
= 0)
Tipo IV: u
z
y q(x) = p(x) (punzn rgido con contacto deslizante)
Muy frecuentemente se presentan en el contacto una combinacin de varios tipos
de problemas, adems, en el contacto utillaje-pieza, los datos no son la distribucin
de presiones sino la fuerza normal y la fuerza tangencial total, las cuales deben ser
iguales a la integracin de las presiones normales y tangenciales respectivamente.
Tampoco se suele conocer el rea de contacto, dato que se obtiene por iteracin.
Para simplicar la resolucin del problema se van a resolver los problemas de
tipo II con q(x) = 0, uno de cuyos casos particulares el el famoso y comn contacto
hertziano. Despus se expondrn otras soluciones que incluyen el contacto con desli-
zamiento parcial (Tipo IV), y el contacto entre supercies rugosas(Tipo II pero con
mltiples puntos de contacto). Con el campo de presiones calculado se proceder a
la determinacin del mapa tensional en la subsupercie que indicar si se produce
dao en la pieza.
Apndice IV: Valores propios de Cauchy para forma
geomtrica polinomial
Se trata de resolver el valor propio de Cauchy que tiene la siguiente forma:
5.4. Anlisis de las tensiones de contacto 95
I
n
=
_
1
1
S
n
(1 S
2
)
1
2
X S
dS (5.95)
en donde X =
x
a
y S =
s
a
.
La solucin de esta integral sigue un ley de recursividad de
I
n
= XI
n
1 J
n
(5.96)
Siendo I
0
= X y J
n
sale de la siguiente integral:
J
n
=
_
1
1
S
n
(1 S
2
)
1
2
dS (5.97)
J
n
es nulo para n impar.
Aunque esta solucin es para funciones polinomiales, se puede tener en cuanta
que cualquier funcin puede desarrollarse en polinomios de Legendre que son los
que mejor aproximacin por mnimos cuadrados dan.
Apndice V: Resolucin del problema hertziano
En los problemas de tipo II en donde q(x) = 0, la forma del punzn rgido tiene
una supercie polinomial de la forma u
z
(x) = Bx
n+1
la ecuacin de contacto
resultante es:
_
a
a
p(s)
x s
ds =
E
2(1
2
)
(n + 1)Bx
n
(5.98)
Para despejar p(x) sirve la equivalencia de Miklin (1948)[?]:
Si
_
a
b
F(s)
x s
ds = g(x) F(x) =
1
2
{(x +b)(a x)}
1
2
_
_
a
b
{(x +b)(a x)}
1
2
g(s)
x s
ds +C
_
(5.99)
La constante C se calcula mediante la condicin de contorno del valor de la
fuerza total:
_
a
b
p(x)dx = P (5.100)
De este modo queda que para contacto simtrico la presin sobre la supercie
ser:
p(x) =
E(n + 1)Ba
n+1
2(1
2
)
I
n
a
2
x
2
+
P
a
2
x
2
(5.101)
A continuacin se estudiar el caso de contacto entre un punzn rgido sobre
una supercie plana elstica. Si el punzn es cilndrico el contacto ser hertziano.
96 Captulo 5. Diseo y anlisis de utillajes de amarre
La supercie cilndrica de radio R se puede aproximar mediante una parbola en la
cual la distancia penetrada ser:
u
z
(x) =
x
2
2R
(5.102)
con lo que estableciendo las equivalencias respecto al problema anterior se tiene
que B = 1/(2R) y n = 1.
Normalmente en el contacto se tiene como dato la fuerza total de compresin P,
teniendo en cuenta el principio de Boussinesq por el que la presin en los extremos
del contacto debe ser nula, se tiene que
p(a) =
1
(a
2
a
2
)
_
Ea
2
4R
+P
_
(5.103)
Para que tenga un valor nito se ha de cumplir que
P =
Ea
2
4R
(5.104)
Lo que permite obtener el semiancho de contacto a partir de los datos del pro-
blema.
a =
_
4RP
E
(5.105)
La forma del perl de presiones ser elptica:
p(x) =
2P
a
2
_
a
2
x
2
(5.106)
La mxima presin sobre la supercie ser entonces:
p
0
=
_
PE
R
(5.107)
Captulo 6
Procesos de conformado por
deformacin plstica
6.1. Introduccin
El conformado por deformacin plstica es el proceso ms antiguo para la fabri-
cacin de piezas metlicas. El notable desarrollo tecnolgico que han sufrido estos
procesos hasta la actualidad permite disponer de una amplia variedad de tcnicas
adaptadas para las distintas aplicaciones, que abarcan desde productos que sirven
como materia prima para otros procesos de fabricacin hasta componentes nales.
6.2. Deformacin permanente en metales
El enlace metlico que une los tomos con orbitales d tienen los electrones de
estos orbitales compartidos por los distintos ncleos, circulando libremente a travs
de todo el material.
La temperatura del material afecta a la distancia media existente en los tomos:
A mayor temperatura, mayor ser la amplitud de la vibracin de los tomos y, por
lo tanto, mayor distancia entre ellos.
La forma de los tomos y la distancia entre ellos hace que el metal cristalice de
una manera caracterstica. El aluminio critaliza cbico centrado en caras, el titanio
y el zinc cristaliza en hexagonal compacto, el hierro y el cobalto tienen formas
alotrpicas, es decir, dependiendo de la temperatura cristalizan en cbico centrado
en cuerpo a temperatura ambiente y cbico centrado en caras a altas temperaturas.
Segn la forma de cristalizar, el metal tendr unos planos caractersticos de
deslizamiento. El que ms planos de deslizamiento tiene es el cbico centrado en
97
98 Captulo 6. Procesos de conformado por deformacin plstica
caras seguido del centrado en cuerpo y por ltimo el hexagonal que slo tiene un
plano de deslizamiento.
Un metal est formado por granos microscpico, cada uno de los cuales es un
cristal con miles de tomos y con una orientacin determinada. La distinta orien-
tacin de los granos cuyo conglomerado forma el metal hace que el material tenga
un comportamiento isotrpico a escala macroscpica.
Al deformar el metal siempre se encontrarn granos con planos cristalogrcos
orientados en la direccin del cortante mximo que se deformarn permanentemente,
mientras que los que no lo estn rotarn hasta que se encuentren en la direccin para
deformarse. Esto hace que el metal deformado est internamente muy distorsionado,
y los granos deformados aumenten sus imperfecciones cristalinas (dislocaciones). Se
dice entonces que el material posee acritud.
Esta acritud hace que localmente muchas partculas se encuentren tensionadas,
aunque globalmente el material se encuentre en equilibrio, son las tensiones re-
siduales. Otro efecto de la acritud es el aumento de resistencia a la deformacin
permanente que se produce (endurecimiento), y la disminucin de capacidad de
deformacin antes de la rotura (fragilizacin).
La acritud se puede eliminar manteniendo el metal a alta temperatura durante
largo tiempo. Este aumento de temperatura aumenta la vibracin de los tomos
permitiendo una ms rpida recolocacin y reorganizacin de los tomos y granos
(recristalizacin), aliviando las tensiones residuales. Este tratamiento trmico suele
conocerse como recocido, o revenido.
Una caracterstica propia del material es su temperatura de recristalizacin, de-
nida como la temperatura a la cual el material alivia un 95 % de sus tensiones
residuales en una hora. Esta temperatura vara con la composicin de la aleacin,
la cantidad de deformacin (acritud) y con las transformaciones de fase que ten-
gan que ocurrir. Esta recristalizacin se realiza en tres fases: Difusin de defectos
cristalinos (cristalitas), alivio de tensiones, y crecimiento de grano (ste hace decre-
cer la resistencia del material). Habitualmente se estima que esta temperatura se
encuentra entre un medio y un tercio de la temperatura de fusin.
6.3. Curva del ensayo de traccin
Un ensayo tpico para la estimacin de las propiedades plsticas de un material
es el Ensayo de traccin. Este ensayo consiste en estirar una probeta a una ve-
locidad constante registrando la resistencia (fuerza) que opone al estiramiento. De
aqu se obtiene una curva fuerza-incremento de longitud. La curva que habitual-
mente (Figura 6.1) se usa es la fuerza dividida el rea de la seccin inicial de la
probeta frente al incremento de longitud dividido por la longitud inicial de la pro-
beta. A uno y otro valor se le denomina tensin nominal s y deformacin nominal
e respectivamente.
Las tensiones y deformaciones nominales estn referidos a valores geomtricos
iniciales, pero la tensin real depende del rea actual que soporta la carga y la
6.3. Curva del ensayo de traccin 99
l
P
A
P
s A = / P
0
e l l = / D
0
UTS
YS
Figura 6.1: Curva de ensayo a traccin
deformacin real depende de la historia de las distintas deformaciones a las que
ha sido sometida la probeta. Para relacionar los valores nominales con los reales se
parte de la hiptesis de conservacin de volumen durante el procesos de deformacin.
Esta hiptesis parte de que la densidad del material no cambia y por lo tanto el
producto del rea por la longitud en cualquier instante es igual al producto entre
valores iniciales:
A
0
l
0
= A l (6.1)
Por lo tanto la tensin real ser:
=
P
A
=
P A
0
A
0
A
= s (1 +e) (6.2)
Del mismo como se procede con la deformacin real.
=
_
l
l
0
dl
l
= ln
l
l
0
= ln(1 +e) (6.3)
El uso de la deformacin real tiene la ventaja adicional de que sus valores son
aditivos.
Otro valor interesante es la velocidad de deformacin en funcin de la velocidad
lineal, ya que de este factor depende la curva de traccin en materiales deformados
en caliente.
e =
de
dt
=
dl
dt
1
l
0
=
v
l
0
(6.4)
100 Captulo 6. Procesos de conformado por deformacin plstica
=
d
dt
=
ln
l
l
0
t
=
v
l
(6.5)
Los puntos caractersticos de esta curva son la resistencia a uencia YS que
limita la zona elstica y la tensin ltima UTS que indica la mayor fuerza que
puede resistir un material para una tensin inicial dada.
6.3.1. Modelizacin del material
La curva de traccin suele tener una zona plstica mucho ms amplia que la
sealada en la gura 6.1, ya que la parte elstica es mucho ms pequea en relacin
al total de la dimensin de la UTS tanto en la parte de tensiones como en la de
deformaciones. Por ello se suele aproximar el comportamiento del material mediante
una curva exponencial en el que las abcisas son las deformaciones permanentes y
las ordenadas son las tensiones de uencia para cada deformacin permanente. Su
forma general ser:
= C
n
m
(6.6)
El exponente n indica el grado de endurecimiento por deformacin, y el valor
de m indica el endurecimiento por velocidad de deformacin (en procesos en fro se
suele considerar m = 0).
Para ciertos clculos esta curva exponencial se suele simplicar tomando un
valor constante de la tensin de uencia que ser la media de la curva exponencial
en el rango de valores que se vaya a usar.
Y =
1
_
0
d (6.7)
6.3.2. Punto de inestabilidad
En procesos de traccin o expansin o estiramiento se podra producir adelga-
zamientos, los cuales se convierten en los puntos ms dbiles de la pieza que se est
deformando pudiendo ocurrir que toda la deformacin plstica pase a concentrarse
en esos puntos. Cuando esto ocurre se dice que el proceso ha entrado en fase de ines-
tabilidad. Casos tpicos son el acuellamiento en traccin, los crteres en estiramiento
plano, o la explosin de tubos a presin.
En el caso de la traccin unidimensional la inestabilidad ocurre cuando la de-
formacin es tal que para una fuerza constante un punto se deforma plsticamente
a costa de la recuperacin elstica del resto de la pieza. Este fenmeno coincidira
con el mximo de la curva P .
dP
d
= 0 =
d( A)
d
= C
n
(A) +ACn
n1
(6.8)
Por lo que la inestabilidad ocurre cuando la deformacin alcanza el valor del
exponente n.
6.4. Trabajo de deformacin 101
6.4. Trabajo de deformacin
Para el clculo de fuerzas y potencias de proceso, el mtodo ms simple es
mediante la obtencin del trabajo de deformacin homognea. En el cual se calcula
la deformacin sufrida por el material considerando el estado nal de ste, y a partir
de la energa necesaria para llevar a cabo esta deformacin, se mayora la energa
necesaria multiplicndolo por factores que estimen la friccin y la irreversibilidad
(o redundancia) del proceso.
W = Pl = Al = V (6.9)
Si el material sigue la ley exponencial.
w
V
=
_
f
0
C
n
d =
C
n + 1
n+1
(6.10)
6.5. Laminacin de chapa metlica
La laminacin es un proceso de conformado en el que el material es forzado a
pasar entre dos elementos rotatorios por la friccin con uno de ellos. Es el proceso
mediante el cual se genera la chapa metlica usada en multitud de aplicaciones,
aunque tambin se sigue este proceso para generar otros perles como rales de
tren, vigas metlicas estructurales, perlado de tubos, etc.
En el laminado se distinguen los procesos de laminado en caliente y en fro. Con
el laminado en caliente se pueden obtener hasta espesores de 2 mm, para obtener
espesores menores con la suciente calidad supercial se requiere realizar el proceso
en fro. En acero, el espesor ms extendido es el de 0.6 mm que es el ms usado para
las carroceras de la industria de automocin. En aluminio se obtienen espesores de
centsimas de milmetros con acabado supercial excelente y tienen aplicaciones en
la industria alimentaria e sanitaria.
En el laminado hay dos rodillos de los que uno posee la fuerza motriz y tiene un
acabado supercial ms irregular para que el rozamiento provoque el avance de la
chapa. El dimetro de los rodillos inuye decisivamente en las tensiones residuales
que quedan en la chapa despus de deformar en fro. Si los dimetros son excesi-
vamente grandes genera unas tensiones residuales de traccin en la supercie que
facilita la aparicin de grietas, picaduras por corrosin, etc. Lo habitual es que en
la supercie queden tensiones residuales de compresin que permitan el doblado y
a la vez aumente su resistencia a la corrosin por picaduras y a la fatiga, ya que
las propias tensiones residuales tienden ha cerrar las pequeas grietas que pudieran
formarse, impidiendo su crecimiento.
El proceso de laminacin en fro se realiza en varias etapas montadas en serie
(el tren de laminacin), y el producto nal se enrrolla en una bobina para facilitar
el transporte y conservacin de la misma. En las etapas nales de la laminacin,
cuando el espesor es muy pequeo, para que el dimetro del rodillo sea similar al
102 Captulo 6. Procesos de conformado por deformacin plstica
espesor de la chapa, el movimiento se transmite a travs de rodillos ms rgidos que
eviten la exin por compresin.
6.6. Tecnologas de transformacin de chapa met-
lica
Una de las caractersticas ms importantes de la chapa metlica es su anisotro-
pa. Las diferentes caractersticas que presenta en las distintas direcciones se puede
aprovechar para obtener productos de mejor calidad. Por ejemplo, conseguir una
buena resistencia a la deformacin en la direccin perpendicular al plano de lami-
nacin permite que sta no adelgace en un proceso de doblado presentando la zona
doblada buena resistencia y rigidez. Esta es una propiedad que tienen las chapas
de acero y titanio pero que no tienen las de aluminio, por ello el aluminio tiene un
uso limitado en las carroceras de los coches. Por otro lado, si las propiedades son
distintas en las dos direcciones del plano de la chapa, a la hora de embutir es fcil
que se formen como orejas en los bordes, lo cual hace necesario aadir al proceso
una operacin de eliminacin de material y enrrasado de bordes.
El parmetro ms usado para estimar la anisotropa de la chapa es la relacin
entre las deformaciones plsticas en la direccin perpendicular al estirado y la del
espesor de viruta.Este parmetro es el coeciente de anisotropa R en una direccin
determinada.
R =
w
t
=
ln(W
f
/W
0
)
ln(t
f
/t
0
)
(6.11)
en donde W es el ancho de la probeta y t es el espesor. Por lo tanto, despus
del estirado se tiene que W
f
< W
0
y que t
f
> t
0
. Cuanto mayor sea el coecien-
te de anisotropa, ms facilidad tendr la chapa de ser doblada o embutida sin
adelgazamientos.
Estimando los coecientes de anisotropa a 0
o
de la direccin de laminacin,
y a 45
o
y a 90
o
se pueden obtener coecientes de anisotropa caractersticos del
material: Coeciente de anisotropa medio R
m
y el coeciente de anisotropa plano
R
p
.
R
m
=
R
0
+ 2R
45
+R
90
4
(6.12)
R
p
=
R
0
2R
45
+R
90
2
(6.13)
En el proceso de embuticin hay un coeciente que delimita el dimetro que
se puede embutir de una chapa determinada (D
0
) respecto al dimetro del punzn
(D
p
). Este coeciente es la Relacin Lmite de Embuticin (LDR). El defecto ms
habitual que puede presentar el producto cuando se embuten dimetros mayores es
la rotura por adelgazamiento en la base. Para evitar este defecto conviene que el
6.7. Problemas de deformacin plstica 103
2
3
1
2
3
0
Acero
Titanio
Aluminio
zinc
R
m
LDR
Figura 6.2: Relacin entre la LDR y el coeciente de anisotropa medio
material tenga un coeciente de anisotropa normal elevado. Para que el las orejas el
producto sean pequeas el coeciente de anisotropa plano debe ser lo ms prximo
a 0.
LDR =
D
0
D
p
(6.14)
Experimentalmente se ha estimado de forma general el valor que toma la LDR
respecto a R
m
.
6.7. Problemas de deformacin plstica
1. En un ensayo de traccin sobre una probeta cilndrica de acero inoxidable de
l
0
= 50,8 mm y seccin A
0
= 35,8 mm
2
se ha obtenido los siguientes datos:
Carga (N) l (mm)
7208 0
11250 5.508
13500 2.03
16200 2.08
18900 10.16
20200 15.24
20700 21.8
13200 24.0
La seccin de la zona fracturada era de A
min
= 10,0 mm
2
Representar grcamente la curva . Calcular las constantes del compor-
tamiento exponencial.
104 Captulo 6. Procesos de conformado por deformacin plstica
Figura 6.3: Extrusin directa
2. En la gura se muestra una pieza producida por una extrusin directa. De-
terminar la fuerza necesaria para producirla. El material es un acero cuya ley
de deformacin plstica es = 650
0,26
N/mm
2
.
3. Determinar la potencia necesaria para el accionamiento de una prensa hidru-
lica capaz de comprimir en caliente un tocho cilndrico de acero de 530 mm
de dimetro, desde una longitud inicial de 150 mm hasta una nal de 80 mm,
a una velocidad de 0.1 mm/s
Supngase que:
El comportamiento del material sigue una ley del tipo
Y =47 N/mm
2
El rendimiento global del sistema hidrulico-mecnico de la prensa es del
45 %
La velocidad relativa de acercamiento de las plataformas de la prensa es
de 0.4 %
Los efectos de friccin y distorsin interna pueden introducir incrementos
promedios de un 40 %
4. Se pretende realizar el estiramiento de un cilindro de 20 50 mm hasta una
longitud de 70 mm. El material sigue una ley de comportamiento plstico
= 650
0,22
N/mm
3
.
a) Cul es la energa de deformacin del proceso?
b) Cul es la fuerza mxima que se alcanza durante el proceso?.
5. En un proceso de estirado de chapa metlica se pretende reducir el espesor de
un eje de 20 1 mm a 0.8 mm (sin reduccin del ancho) mediante su paso
entre dos rodillos. El metal tiene una tensin de uencia de = 240
0,33
MPa. Las prdidas por friccin y redundancia son el 30 % de la energa total
del proceso.
6.7. Problemas de deformacin plstica 105
a) Calcular la fuerza necesaria para la realizacin del proceso
b) Determinar el aumento de resistencia a uencia del eje con la reduccin
de espesor
c) Calcular la productividad mxima del proceso cuando la potencia dispo-
nible en la mquina es de 5 kw
F
6. Determinar la potencia necesaria para el accionamiento de una treladora
capaz de disminuir un alambre desde un dimetro D
1
= 6 mm a un dimetro
D
2
= 5 mm en una sola etapa, y con una productividad de 5 m/s.
Supngase que:
El comportamiento del material sigue una ley del tipo = 745
0,48
N/mm
2
El rendimiento global del sistema mecnico de la mquina es del 70 %
Los efectos de friccin y distorsin interna pueden introducir incrementos
promedios de un 50 %
7. Un tubo con un dimetro exterior D
1
= 60 mm y espesor t
1
= 10 mm es
reducido a un dimetro D
2
= 50 mm en un proceso de trelado simple (aunque
con un mandril interior). El material es cobre con = 440
0,3
N/mm
2
.
a) Cul es la fuerza del proceso cuando el espesor nal es t
2
= 7 mm?
8. Calcular el coeciente de anisotropa medio de una chapa de acero en el que
se ha hallado que R
0
=0.8, R
45
=1.5, R
90
=1.7. Calcular el dimetro mximo
de chapa que se puede embutir para hacer un cuenco de 20 mm de dimetro
interior. Se formarn orejas?.
106 Captulo 6. Procesos de conformado por deformacin plstica
Captulo 7
Proceso de conformado por
fundicin
7.1. Introduccin
El conformado de metales por fundicin es uno de los ms antiguos. Bsicamente
consiste en la colada de un metal fundido en un molde con la forma deseada. Actual-
mente hay una gran variedad de piezas metlicas en automocin y en maquinaria
que son fundidas.
Las ventajas e inconvenientes de este tipo de procesos se resume en la siguiente
tabla:
Ventajas Inconvenientes
Ahorro energtico glo-
bal
Poca exibilidad
Forma nal de piezas
complejas
Procedimientos artesa-
nales
Rapidez (salvo solidi-
cacin)
Se deteriora la micro-
estructura
Piezas de tamao ili-
mitado
Poros, oxidacin,...
El proceso de conformado por fusin tiene las etapas descritas en la Figura 7.1.
La clasicacin de los procesos de fundicin se pueden clasicar de varios modos:
1. Segn la fuente de energa usada en el horno para fundir el metal:
Combustin
Resistencia
107
108 Captulo 7. Proceso de conformado por fundicin
Fundicin Moldeo
Colada
Solidificacin
Extraccin
Figura 7.1: Proceso de conformado por fundicin
Induccin electromagntica
Arco elctrico
2. Segn el permanencia del molde y el modelo:
Permanente (coquilla)
No permanente
Modelo permanente (moldeo en arena, en cscara)
Modelo no permanente (moldeo a la cera perdida)
3. Segn el vertido:
Gravedad
Baja presin (0.1 2 MPa)
Alta presin (15 80 MPa)
4. Segn el tiempo de solidicacin:
Rpida
Lenta
7.2. Metal fundido
Cada metal puro tiene una temperatura caracterstica en la que pasa de estado
slido a estado lquido, absorbiendo una cantidad de calor (entalpa de cambio de
fase). Cuando el metal es una mezcla de metales puros con distinta temperatura de
fusin, el cambio de fase no se produce en una determinada temperatura sino en
un rango de temperaturas, salvo que la mezcla consista en unas proporciones deter-
minadas que hacen que se comporte como un metal puro, a este punto se le llama
eutctico, y su punto de fusin est por debajo de la menor temperatura de fusin
de los metales puros que componen la mezcla. Las aleaciones comerciales (salvo las
7.3. Tecnologas de moldeo 109
del hierro) suelen tener composicin eutctica por las ventajas que comporta. Casos
tpicos son la aleacin de Aluminio (T
f
=660) con Silicio al 12 % que funde a 562.
Otros casos son el de la fundicin de hierro con un 4 % de carbono, el bronce, el
latn, el zamac, etc.
La fundicin del metal se debe realizar en un recipiente (crisol) que debe te-
ner consistencia suciente a la temperatura mxima de fundicin. Estos materiales
suelen ser de naturaleza cermica y se llaman refractarios. Estos materiales se clasi-
can segn la reactividad que tienen con el metal fundido (caldo): son cidos si son
sensibles al contenido de azufre del caldo, o bsicos si no lo son para el azufre pero
s para el carbono. Los refractarios cidos suelen constar de slice (SiO
2
) y xidos
de hierro, mientras que los bsicos constan de xidos de magnesio (magnesita) y
suelen ser bastante ms caros.
La chatarra se coloca en el crisol mezclada con una arenilla (fundente) que tiene
diversas funciones durante la fundicin:
Limpia el metal fundido de impurezas, evitando que la pieza nal tenga mu-
chas inclusiones.
Evita la oxidacin del caldo pues forma una capa compacta (escoria) otando
sobre el caldo que aisla a ste del oxgeno y de otros gases.
Ajuste de composicin qumica del metal
Los fundentes tambin son susceptibles de reaccionar qumicamente con el metal
fundido y con el refractario de las paredes. Para evitar esta reactividad ltima el
tipo de fundente (si cido o bsico) debe ser el mismo que el del refractario usado
para construir el crisol.
Respecto a la temperatura del metal fundido, conviene que est por encima de
la temperatura de fusin para que no solidique antes de tiempo durante la colada,
pero no debe ser demasiado elevada pues podra daar el molde y la absorcin de
gases (el N
2
, H
2
, . . . ) aumenta con la temperatura, tendiendo a la efervescencia.
7.3. Tecnologas de moldeo
Moldeo en arena, en cscara, en coquilla, a la cera perdida. Fundicin en molde
metlico a baja y a alta presin. Estas tcnicas de moldeo vienen ilustrados en las
guras adjuntas.
7.4. Colada
El ujo del metal fundido por los bebederos y canales de distribucin viene
dado por las ecuaciones de la mecnica de uidos. Para conocer la presin y la
velocidad de ujo basta la ecuacin de Bernoulli (7.1) y continuidad (7.2), pues las
prdidas son muy pequeas. El rgimen de ujo conviene que sea de turbulencia
moderada, ya que con el rgimen laminar el metal fundira en las paredes de los
110 Captulo 7. Proceso de conformado por fundicin
canales pudiendo obstruirlos, por ello el nmero de Reynolds (7.3 conviene que est
comprendido entre 2000 y 20.000.
h +
p
g
+
v
2
2g
= cte (7.1)
Q = A
1
v
1
= A
2
v
2
(7.2)
Re =
v D
(7.3)
7.5. Solidicacin
Velocidad de solidicacin (Ecuacin de Chvorinov). El tiempo de solidicacin
depende del tamao de la pieza y de la supercie que dispone para transmitir el
calor. Cuanto mayor sea la pieza, ms tiempo de solidicacin requerir. Chvorinov
(7.4) estableci una relacin que puede ser orientativa a la hora de hacer pruebas a
pequea escala.
t
s
= C
_
Volumen
Supercie
_
2
(7.4)
Contraccin. La contraccin de la pieza se produce en la solidicacin y en el
enfriamiento hasta la extraccin, por lo que los modelos suelen ser de mayor tamao
que el deseado para las piezas nales.
La contraccin puede tener efectos no deseados como los rechupes y poros que
son impercetibles desde el exterior, pero que debilitan mucho la pieza. Para evitar
estos defectos se procura que la solidicacin sea direccional y siguiendo un frente
conocido. Esto se consigue mediante pequeos depsitos que mantienen diertas zo-
nas calientes y alimentan de metal fundido la pieza mientras se est produciendo la
solidicacin. Estos depsitos suelen tomar la forma de rebosaderos o mazarotas.
7.6. Problemas de Fundicin
1. Un aluminio puro es vertido en un molde de arena. El nivel del metal en la
artesa est 20 cm por encima del nal del canal de alimentacin. (El alumi-
nio tiene una densidad de =2385 Kg/m
3
, y una viscosidad de =0.0013 Pa
s.)Calcular:
a) Rango de valores en el que se debe encontrar el dimetro del canal de
alimentacin al nal de su trayecto.(N
o
de Reynolds Re=
vD
)
b) Determinar el caudal mximo al inicio de la colada.
7.6. Problemas de Fundicin 111
2. Estimar la fuerza de cierre para el proceso de fabricacin de unos soldados
de plomo por fundicin a presin de 20 MPa. Cada soldado tiene un rea
proyectada de 5.000 mm
2
. Cuntos se podran fabricar en una inyeccin si la
fuerza del pistn es de 1 MN?
112 Captulo 7. Proceso de conformado por fundicin
Captulo 8
Problemas
8.1. Problemas de metrologa
1. Un taller va a mecanizar el exterior de un eje cilndrico con dimensiones es-
pecicadas 50 0,025 mm. En la fase de preparacin se mecaniza una pieza
y se comprueba un radio situando sta sobre un mrmol y aproximndole
dos varillas calibradas por ambos lados, tomando la cota M entre las partes
externas de los rodillos.
Los rodillos tienen un radio de 10 mm con incertidumbre de 2 m con K = 2,
y el aparato de medida tiene una incertidumbre de 3 m con K = 2. La cota
M da un valor de 83.858 mm.
Calcular el radio de la pieza fabricada e incertidumbre del procedimiento.
2. Calcular la conicidad del cono de la gura cuando M
1
= 100, r = 8, y L
1
= 20.
Si se toma otra medida con L
2
= 10, resulta que M
2
= 75. (Las unidades
vienen en mm)
Si adems se sabe que la incertidumbre de L es U
L
= 0,006 + 0,001 L (con
K
L
= 2), y que U
M
= 0,02 (con K
M
= 2). Determinar la incertidumbre de la
medida de la conicidad para un K = 3.
113
114 Captulo 8. Problemas
M
r
L
3. Se pretende medir un ngulo mediante una regla de senos y bloques patrn, tal
como se muestra en la gura. Los datos numricos son los siguientes: L = 50;
r = 10; H
1
= 20; H
2
= 42. Las incertidumbres son: U
r
= 0,01; U
H1
= 0,005;
y U
H2
= 0,007, todas con K = 2. Calcular y su incertidumbre en grados
sexagesimales.
Todas las magnitudes longitudinales vienen en mm
H
2
H
1
a
L
r
8.2. Problemas de mecanizado
1. Una herramienta de torno con punta angular, donde
r
= 60
y f = 0,05
mm/rev. Cul debe ser el ngulo de lo secundario para obtener una rugo-
sidad media R
a
= 3 m bajo condiciones ideales?
R:
r
= 15,57
2. En una operacin de torneado de un cilindro 70 300 mm el avance es de
0.25 mm/rev y la velocidad de corte de 1 m/s. La fuerza de corte est limitada
a 3 kN y la energa especca de corte del material es de 2000 MPa. Calcular:
a) El tiempo de realizacin de la operacin.
b) La profundidad mxima de pasada.
8.2. Problemas de mecanizado 115
R: 263.9 s; 6 mm
3. En una operacin de taladrado con una broca de dos los, la velocidad angular
n
t
= 300 r.p.m., el avance es f = 0,2 mm/rev, el ngulo de lo principal
r
= 60
, el dimetro de la broca es d
t
= 12 mm. Si la energa especca de
corte del material que est cortando es p
s
= 3000 MPa.
Calcular:
a) La tasa de arranque.
b) El espesor de viruta no deformado.
c) El par motor de la taladradora.
R: 113.1 mm
3
/s; 0.087 mm; 10.8 Nm
4. En una operacin de cilindrado la vida de la herramienta obedece a la siguiente
ecuacin de Taylor t = v
3
f
0,8
a
0,1
p
estando v, f, y a
p
en unidades S.I.
Estimar el efecto en% sobre la vida de la herramienta, al duplicar la tasa de
arranque incrementando:
a) La velocidad.
b) El avance.
c) La profundidad de corte.
R: 87 %; 43 %; 7 %
5. En una operacin de torneado, se reduce el dimetro de un cilindro 40 70
a 35 mm. Primero mediante una pasada de desbaste hasta un dimetro de
36 mm y despus mediante una pasada de acabado hasta el dimetro nal.
La herramienta tiene un radio de punta de 2 mm y el ngulo de posicin de
lo es
r
= 75
. La mquina tiene una potencia mxima de 5 kW. La energa
especca de corte viene dada en funcin del espesor de viruta mediante la
siguiente expresin:
p
s
= 3000
_
0,4
a
c
_
0,29
viniendo a
cmax
en mm, y p
s
en MPa
Determinar:
a) El avance mximo en la pasada de desbaste si la velocidad de corte es de
70 m/min.
116 Captulo 8. Problemas
Figura 8.1: Fresado perifrico
b) El avance mximo en la pasada de acabado si la rugosidad supercial a
conseguir es de R
a
=5 m.
6. Un redondo de 80 mm de dimetro se rebaja a en una pasada a 75 mm de
dimetro a lo largo de una longitud de 150 mm. La energa especca de corte
del material de trabajo es de 2000 MPa. El avance es de 0.25 mm/rev y la
velocidad angular del husillo es de 300 rpm. Calcular:
a) El tiempo de realizacin de la operacin
b) El par motor y la potencia necesaria para realizar dicha operacin.
7. En una operacin de escuadrado con fresa perifrica (Figura 8.1), segn el
dibujo de la gura, la pieza tiene una longitud de 50 mm y una energa espe-
cca de corte p
s
= 2000 MPa. La fresadora tiene 10 dientes y un dimetro
de 50 mm. Determinar el avance en mm/rev para que la rugosidad supercial
sea R
t
= 0,2 m. Calcular en este caso el espesor mximo de viruta.
R: 2 mm/rev; 0.12 mm
8. Con los datos del problema anterior y sabiendo que la potencia mxima de la
mquina es de 3 kW y la velocidad de la fresa es de 100 r.p.m. Determinar el
avance mximo en mm/rev y el tiempo de mecanizado.
R: 6 mm/rev; 6.5 s
9. En un fresado perifrico la fresa tiene 20 dientes y su dimetro es de 100 mm.
La velocidad de rotacin es de 5 rev/s, el avance 1.3 mm/s, la penetracin 6
mm, y el ancho de la pieza de 50 mm. La relacin entre el espesor mximo de
viruta no deformado a
cmax
y la energa especca de corte viene dado por:
8.2. Problemas de mecanizado 117
p
s
= 1,4
_
1 +
2,5 10
6
a
cmax
_
(8.1)
viniendo a
cmax
en m, y p
s
en GJ/m
3
.
Estimar:
a) La tasa mxima de arranque.
b) La potencia mnima en kW requerida por la operacin
10. En una operacin de fresado perifrico, la pieza de trabajo tiene un ancho de
75 mm, y una longitud de 200 mm, su espesor ha de rebajarse 5 mm en una
pasada.
a) Qu velocidad de avance debe usarse si la potencia disponible para el
corte es de 3 kW y la fuerza especca de corte es de 3.6 GJ/m
3
?
b) Si la fresa tiene 100 mm de dimetro, un solo diente y la rugosidad
mxima supercial ideal es de 1.5 m. Cul debe ser la la velocidad de
rotacin mnima de la fresa?
c) Cul es la velocidad de corte?
d) Y el tiempo de mecanizado?
11. En un fresado perifrico la fresa tiene 20 dientes y su dimetro es de 200 mm.
La velocidad de rotacin es de 5 rev/s, el avance 1.3 mm/s, la penetracin 6
mm, y el ancho de la pieza de 50 mm. La relacin entre el espesor mximo de
viruta no deformado a
cmax
y la energa especca de corte viene dado por:
p
s
= 1,4
_
1 +
2,5 10
6
a
cmax
_
(8.2)
viniendo a
cmax
en m, y p
s
en GJ/m
3
.
Estimar:
a) La tasa mxima de arranque.
b) La potencia mnima en kW requerida por la operacin
12. En una operacin de fresado perifrico, los siguientes datos: velocidad de ro-
tacin es de 2.5 rev/s, el avance 2 mm/s, la penetracin 10 mm, el ancho de
la pieza de 50 mm, la longitud de la pieza 150 mm, el dimetro de la fresa
118 Captulo 8. Problemas
40 mm, n de dientes de la fresa 10.La relacin entre el espesor mximo de
viruta no deformado a
cmax
y la energa especca de corte viene dado por:
p
s
= 3000
_
0,4
a
med
_
0,29
(8.3)
viniendo a
cmax
en mm, y p
s
en MPa
Estimar:
a) La potencia requerida por la mquina si tiene una rendimiento del 80
b) Tiempo de mecanizado
13. En una operacin de fresado perifrico, la pieza de trabajo tiene un ancho de
75 mm y una longitud de 200 mm, y se ha de rebajar su espesor 5 mm en una
pasada. La fresa tiene 50 mm de dimetro y 3 dientes, la potencia nominal de
la fresadora es de 3 kW y la energa especca de corte es de 3.6 GJ/m
3
.
Determinar:
a) La mxima velocidad de avance.
b) La velocidad angular de la rueda para que la rugosidad supercial terica
R
t
sea inferior a 1.5 m.
c) El tiempo de mecanizado de la pieza.
14. Wn una oprracin de fresalo frontal, la profundiaad de coite es 5mm la velo-
cidad de avance 0.67 mm/s, el ancho de la pieza 50 mm, y la fresa tiene 20
dientes con un dimetro de 800 mm. La velocidad de corte es de 1 m/s.
Calcular:
a) Velocidad angular de la fresa
b) Tasa de arranque mxima
c) tiempo necesario para mecanizar 100 piezas de longitud 150 mm si el
tiempo de carga y descarga es de 180 s.
8.3. Economa de mecanizado
1. En un planeado con limadora (Figura 8.2), se pretende rebajar un bloque de
100 100 40 a un espesor de 36 mm con un avance de 0.5 mm/pasada. La
herramienta es de acero rpido con una ecuacin de Taylor vt
0,125
= 2,65 (v y
8.3. Economa de mecanizado 119
Figura 8.2: Limado
t en unidades S.I.). Su coste es de 4000 ptas(incluidos realados), la mquina
tiene una tasa horaria de 2300 ptas/hora. El tiempo de cambio de herramienta
es de 200 s. El tiempo que tarda en reposicionar la herramienta despus de
cada pasada es 1.5 veces el tiempo de corte en una pasada (t
l
depende de la
velocidad de corte), y ec tiempo de carga-descarga de pieza que son 100 s.
Calcular el tiempo por pieza de mxima productilidad, y el mnimo coste de
cada pieza.
R: (t
pr
)
p
)= 147.56 s; (C
pr
)
e
=90.87 pts
2. En una operacin de cilindrado de un lote de 1020 ejes 76 300 mm con
un avance f = 5,25 mm/rev. La herramienta utilizada es un carburo con
los siguientes parmetros de desgaste: n = 0,25, v
r
= 2 m/s, t
r
= 63 s. La
herramienta tiene un coste total de 208 pts por alado. La tasa horaria de la
mquina es de 6002 pts. El tiempo de cambio de herramienta es t
ct
= 100 s. El
tiempo de cara y descarga de pieza es t
l
= 120 s. Calcular el tiempo mnimo
de fabrycacin del lote en horas, y el coste mnimo del lote.
R: 65 h; 231.870 pts
3. En ensayos de vida de herramienta con plaquitas de carburo y una pieza de
acero, la vida de la herramienta se encontrn que era de 18.6 ks a v = 1 m/s
y de 363 s a 2 m/s. El coste de la plaquita es de 800 ptas y tiene 4 los. El
tiempo de cambio de lo es de 19 s y el de recambio de herramienta es 30 s.
a) Para una tasa horaria de 6000 pts Cul es la vida de la herramienta de
mnimo coste?
b) Qu velocidad dar esta vida?
4. El tiempo de mecanizado en una operacin particular de torneado es 200 s y
la herramienta debe cambiarse cada 5 piezas. El tiegpo no productivo es 310
120 Captulo 8. Problemas
s y el tiempo de cambio de herramienta es 152 s. La velocidad de corte es 2.5
m/s y la herramienta es del tipo de plaquita soldada de carburo cuyo coste
por alado es 500 pts. El exponente de Taylor es de 0.25
a) Cunto debera cambiar la velocidad de corte para trabajar a coste
mnimo? (Tasa horaria 3600 pts)
b) Cunto se ahohrar por pieza trabajando a coste mnimo?
5. En una operacin de fresado perifrico, la fresa tiene 0 los para planear una
supercie de acero de 200 mm de longitud. El dimetro de la fresa es de 150
mm y es de acero rpido. El tiempo de cambio de cuchillas es de 5 min y la
vidg de la herramienta viene dada por vt
0,125
= 2,61 donde v y t vienen en
unidades SI. La penetracin es de 14 mm. La tasa horaria 4000 pts, donde las
cuchillas cuestan 53.000 pts y 2.000 pts su realado. Las otras cuestan 20.000
y 2400 su realado. El n de realados de todas la cuchillas es 20. El tiempo
de carga y descarga es de 3 min.
a) Estimar el coste mnimo de produccin y su tiempo correspondiente cuan-
do la velocidad de avance es de 1 mm/rev.
b) Calcular los mismos datos si, mediante un utillaje especial, se reduce el
tiempo de carga y descarga en 30 s.
6. En una operajin con taladradora se pretenden realizar dos agujeros de 20
mm de profundidad y 5 mm de dimetro. El avance es de 0.1 mm/rev., la
broca tiene 2 cuchillas de 1000 pts cada una. El tiempo de carga y descarga
es de 30 s, el de cambio de herramienta es de 28 s, el tiempo de retroceso y
reposicionamiento es de 6 s. La tasa horaria es de 1000 pts, y la ecuacin de
Taylor de cada cuchilla es v t
0,25
= 2,65 con expresiones en unidades S.I.
Determinar:
a) El tiempo de fabricacin promedio trabajando a coste mnimo.
b) La velocidad angular que tendr la broca trabajando en este rgimen en
r.p.m.
7. En una operacin de fresado frontal de la pieza de la gura. El avance es de 0.2
mm/rev., la fresa tiene 7 cuchillas de 1070 pts cada una. El tiempo de carga
y descarga es de 30 s, el de cambio de herramienta es de 20 s, La tasa horaria
es de 5000 pts, y la ecuacin de Taylor de cada cuchilla es v t
0,05
= 2,01 con
expresiones en unidades S.I.
Determinar:
a) El tiempo de fabricacin promedio trabajando a coste mnimo.
b) La velocidad angular que tendr la fresa trabajando en este rgimen.
8.4. Problemas de deformacin plstica 121
30
50
20
8. Una mquina transfer de 1 estaciones tiene los siguientes parmetros:
Estacin L, m t
c
t, s C
t
, pps M, pts/s
1 181 180 400 0,6
2 243 60 600 0,48
3 61 130 400 0,76
4 91 120 920 0,6
5 122 541 230 0,6
La herramienta sigue la ley vt
0,120
= 1,99 donde v y t vienen en unidades SI,
y el tiempo de indexacin es 52 s.
Calcular el coste mnimo por pieza y el tiempo en cada estacin.
9. Una mquina transfer de 2 estaciones, tiene que producir la pieza de la gura
9.
En la primera estacin se realiza el escuadrado con una fresa perifrica de
d
t
= 150 mm, N=8 dientes y avance f = 1 mm/rev. El tiempo de cambio de
herrasienta es de 180 s.
En la segunda estacin se realiza el taladrado con una broca de d
t
= 40 mm,
un ngulo de posicin
r
= 90
y un avance de f = 0,1 mm/rev. El tiempo
de cambio de herramienta es de 120 s.
Todos lo los tienen la siguiente ecuacin de Taylor vt
0,129
= 1,6 dondu v y t
vienen en unidades SI, y el tiempo de indexacin es 12 s.
Calcular el tiempo mnimo promedio por pieza y la velocidad de rotacin de
la herramienta en cada estacin para este rgimen.
8.4. Problemas de deformacin plstica
1. Determinar la potencia necesaria para el accionamiento de una prensa hidru-
lica capaz de comprimir en caliente un tocho cilndrico de acero de 530 mm
de dimetro, desde una longitud inicial de 150 mm hasta una nal de 80 mm.
Supngase que:
El comportamiento del material sigue una ley del tipo
Y =47 N/mm
2
122 Captulo 8. Problemas
Figura 8.3: Extrusin directa
El rendimiento global del sistema hidrulico-mecnico de la prensa es del
45 %
La velocidad relativa de acercamiento de las plataformas de la prensa es
de 0.4 %
Los efectos de friccin y distorsin interna pueden introducir incrementos
promedios de un 40 %
2. En la gura se muestra una pieza producida por una extrusin directa. De-
terminar la fuerza necesaria para producirla. El material es un acero cuya ley
de deformacin plstica es = 650
0,26
N/mm
2
.
3. En un ensayo de traccin sobre una probeta cilhndriua de acero inoxidable de
l
0
= 50,8 mm y seccin A
0
= 35,8 mm
2
se ha obtenido los siguientes datos:
8.5. Fundicin 123
Carga (N) l (mm)
7208 0
11250 5.508
13500 2.03
16200 2.08
18900 10.16
20200 15.24
20700 21.8
13200 24.0
La seccin de la zona fracturada era de A
min
= 10,0 mm
2
Representar grcamente la curva . Calcular las constantes del compor-
tamiento exponencial.
4. Determinar la potencia necesaria para ej accionamiento de una treladora
capaz de disminuir un alambre desde un dimetro D
1
= 6 mm a un dimetro
D
2
= 2 mm en una sola etapa, y con una productividad de 5 m/s.
Supngase que:
El comportamiento del material sigue una ley del tipo = 745
0,48
N/mm
2
El rendimiento global del sistema mecnico de la mquina es del 70 %
Los efectos de friccin y distorsin interna pueden introducir incrementos
promedios de un 50 %
5. Un tubo con un dimetro exterior D
1
= 60 mm y espesor t
1
= 10 mm es
reducido a un dimetro D
2
= 50 mm en un proceso de trelado simple (aunque
con un mandril interior). El material es cobre con = 440
0,3
N/mm
2
.
a) Cul es la fuerza del proceso cuando el espesor nal es t
2
= 7 mm?
6. Se pretende realizar el estiramiento de un cilindro de 20 50 mm hasta una
longitud de 70 mm. El material sigue una ley de comportamiento plstico
= 650
0,22
N/mm
3
.
a) Cul es la energa de deformacin del proceso?
b) Cul es la fuerza mxima que se alcanza durante el proceso?.
8.5. Fundicin
1. Un aluminio puro es vertido en un molde de arena. El nivel del metal en la
artesa est 20 cm por encima del nal del canal de alimentacin. (El alumi-
nio tiene una densidad de =2385 Kg/m
3
, y una viscosidad de =0.0013 Pa
s.)Calcular:
124 Captulo 8. Problemas
a) Rango de valores en el que se debe encontrar el dimetro del canal de
alimentacin al nal de su trayecto.(N de Reynolds Re=
vD
)
b) Determinar el caudal mximo al inicio de la colada.
Captulo 9
Cuestiones de examen
1. En qu consiste el principio de generacin de supercies unidimensional?.
Cita dos casos en deformacin plstica.
2. Clasicacin de los procesos bsicos segn el ujo de energa.
3. Dene la trazabilidad de una medida de precisin.
4. Dene la sensibilidad de un instrumento de medida.
5. Diferencia entre repititibilidad y reproducibilidad de un procedimiento de me-
dida.
6. Cul es el intervalo de seguridad y el nivel de conanza de una medida?
7. Indica la cadena de diseminacin de unidades desde el patrn nacional hasta
los instrumentos de medida de taller.
8. Relacin que suele existir entre la tolerancia de diseo y la incertidumbre del
instrumento de medida en una medida de precisin.
9. Relacin conveniente que debe existir entre incertidumbre del instrumento de
medida y la tolerancia de la cota a comprobar.
10. Indica la relacin conveniente entre incertidumbre y divisin de escala de un
instrumento de medida.
11. Cmo depende en la incertidumbre de una medida la incertidumbre del pa-
trn con que se ha calibrado el instrumento.
12. En qu consiste un diagrama de niveles de instrumentos de medida?
125
126 Captulo 9. Cuestiones de examen
13. Qu parmetros se utilizan con ms frecuencia para cuanticar la calidad de
acabado supercial?
14. Cmo se mide la rugosidad supercial media R
a
a partir del perl dado por
el rugosmetro?.
15. Describe el proceso de moldeo en cscara.
16. Indica la regla de Chorinov relativa al tiempo de solidicacin de metales.
17. De qu depende la disolucin de gases en un metal fundido?Qu tipo de
defectos producen?
18. Describe el proceso de moldeo en cscara.
19. Qu es una mazarota? Para qu sirve?
20. Indica brevemente cmo se construye un molde para fundicin en arena.
21. Describe el proceso de fundicin en cmara caliente con cuello de cisne.
22. En qu consiste la soldadura por autgena?.
23. Explicar el fenmeno termoinico en el establecimiento del arco.
24. Soldadura por puntos.Qu parmetros se usan para ajustar el proceso?
25. Cundo se usan electrodos bsicos en soldadura con electrodo revestido.
26. Diferencia entre soldadura fuerte y soldadura blanda. Cita, para cada tipo,
dos metales que se usan como material de aportacin.
27. Realiza un esquema de funcionamiento de la soldadura MIG. Qu ventaja
presenta frente a otros tipos de soldadura?
28. Reaccin qumica en la que se basa la aluminotermia
29. Tipos de llama en soldadura oxiacetilnica.
30. Reaccin qumica principal en la soldadura autgena con acetileno. Cundo
se usa llama oxidante?
31. Cundo conviene usar la soldadura en arco sumergidos(SAW)?.
32. Ilustra con un esquema el funcionamiento de la soldadura TIG. Qu ventajas
presenta frente a otros mtodos?
33. Como afecta la temperatura a la deformacin plstica de metales?
34. Deduce dnde se encontrara el punto de inestabilidad en un proceso de esti-
rado cuando la curva tensin-deformacin sigue la ley = C
n
.
127
35. Relacin entre tensin real y tensin nominal en un ensayo de traccin.
36. Dene el coeciente de anisotropa plano de una chapa metlica. Como in-
uye este parmetro en el proceso de embuticin?
37. Cmo inuye la velocidad de deformacin en procesos de deformacin plstica
en caliente?
38. Qu dicultades presenta el aluminio para el doblado frente al acero?
39. Deduce las expresiones de las deformaciones y tensiones reales a partir de las
deformaciones y tensiones nominales dados en el ensayo de traccin.
40. Qu factores inuyen en la relacin lmite de embuticin (LDR)?
You might also like
- Álgebra lineal aplicada a las ciencias económicas 2edFrom EverandÁlgebra lineal aplicada a las ciencias económicas 2edRating: 4 out of 5 stars4/5 (1)
- Desarrollo seguro en ingeniería del software.: Aplicaciones seguras con Android, NodeJS, Python y C++From EverandDesarrollo seguro en ingeniería del software.: Aplicaciones seguras con Android, NodeJS, Python y C++No ratings yet
- Principios de MecanizadoDocument114 pagesPrincipios de Mecanizadofito_sNo ratings yet
- Ap de Ingeniería de Fabricación PDFDocument127 pagesAp de Ingeniería de Fabricación PDFjcarlos.herreraNo ratings yet
- Apuntes de Ingeniería de FabricaciónDocument127 pagesApuntes de Ingeniería de FabricaciónAbel HernandezNo ratings yet
- PFCDavid Lucena PachecoDocument101 pagesPFCDavid Lucena PachecoYoNo ratings yet
- Mecanizado CatiaDocument264 pagesMecanizado Catiaangelmtgg100% (2)
- Aplicacion CadcamDocument137 pagesAplicacion CadcamAlberto Salvador Orihuela SanabriaNo ratings yet
- FMV22Document117 pagesFMV22Jesus PerezNo ratings yet
- Estructura y Tecnologia de Computadores 3 - Libro ProblemasDocument176 pagesEstructura y Tecnologia de Computadores 3 - Libro Problemasapi-19970781No ratings yet
- Impresora 3DDocument109 pagesImpresora 3Djorge100% (2)
- AlgoritmosDocument71 pagesAlgoritmosRando RivasNo ratings yet
- Diseño y Construcción - Impresora - 3d PDFDocument109 pagesDiseño y Construcción - Impresora - 3d PDFYito MartínezNo ratings yet
- Libro EstructuraDatosDocument163 pagesLibro EstructuraDatosDavid PXNo ratings yet
- Tesis 07 PDFDocument126 pagesTesis 07 PDFJimmi Raul Guinea PerezNo ratings yet
- Operacion de Grua Telescopica PDFDocument884 pagesOperacion de Grua Telescopica PDFJuan Mora100% (2)
- Tesis MaxDocument165 pagesTesis MaxJoaquin CasanovaNo ratings yet
- Diseño Tornillo de PotenciaDocument201 pagesDiseño Tornillo de Potenciaterran313100% (1)
- Alejandro Adanaque - Gean Flores - Trabajo de Investigacion - Bachiller - 2019Document165 pagesAlejandro Adanaque - Gean Flores - Trabajo de Investigacion - Bachiller - 2019Angel PonceNo ratings yet
- 3 - Analisis Estructural Mecanismo Tijera SimpleDocument89 pages3 - Analisis Estructural Mecanismo Tijera SimpleJ ParraNo ratings yet
- Troqueladora de Aluminio FinalDocument36 pagesTroqueladora de Aluminio FinalcasanaNo ratings yet
- Trab AbasDocument77 pagesTrab AbasantonioNo ratings yet
- AC80-2-48189 Grua-Part1 - EsDocument540 pagesAC80-2-48189 Grua-Part1 - EsReynerio AlvarezNo ratings yet
- 509964Document90 pages509964Jorge GumetaNo ratings yet
- Castro River Os Fabian Camilo 2020Document167 pagesCastro River Os Fabian Camilo 2020Draket DarknexNo ratings yet
- Propuesta de Tercer Curso de Programaci ́on para La Licenciatura en Ciencias de La ComputacionDocument162 pagesPropuesta de Tercer Curso de Programaci ́on para La Licenciatura en Ciencias de La ComputacionDeanGiraffeMaster288No ratings yet
- ThesisDocument215 pagesThesisEdwin Abregú LeandroNo ratings yet
- NADA CASI PF - CardenasMunozSaenzSanchezDocument157 pagesNADA CASI PF - CardenasMunozSaenzSanchezJavierNo ratings yet
- Diseño de Peladora de PiñasDocument108 pagesDiseño de Peladora de PiñasEyner GonzalesNo ratings yet
- DM211004 A Es PDFDocument156 pagesDM211004 A Es PDFferpriss100% (1)
- Tesina AP 30aDocument243 pagesTesina AP 30aMaxi LamadridNo ratings yet
- Manual de Operacion Superestructura AC 100Document974 pagesManual de Operacion Superestructura AC 100Alejandro ZuñigaNo ratings yet
- Lea Dfo PDFDocument326 pagesLea Dfo PDFKarlos VergaraNo ratings yet
- AC200-super Es PDFDocument972 pagesAC200-super Es PDFjavier cjuro100% (1)
- AC100 4-10185o-Part1 EsDocument1,270 pagesAC100 4-10185o-Part1 EsSig Duran100% (2)
- Manual de Carrozado FusoDocument361 pagesManual de Carrozado FusoXxdemianxX100% (7)
- AC80 2 48159j Part1 - EsDocument538 pagesAC80 2 48159j Part1 - EsRicardo Ricaldi Calderon100% (1)
- Analisis Modal y Prediccion en Cat 793cDocument114 pagesAnalisis Modal y Prediccion en Cat 793ccbernabeNo ratings yet
- TFM Memoria AngelsDocument116 pagesTFM Memoria AngelsGerardo Daniel Arroyo GarciaNo ratings yet
- Eolicos 1.00 PDFDocument447 pagesEolicos 1.00 PDFgary undaNo ratings yet
- Controldelmov PDFDocument151 pagesControldelmov PDFMizael GamboaNo ratings yet
- García-España - Diseño de Sistema de Control Robótico para Un Puesto de Soldadura Con Medición 3d...Document71 pagesGarcía-España - Diseño de Sistema de Control Robótico para Un Puesto de Soldadura Con Medición 3d...JosueNo ratings yet
- IndiceDocument6 pagesIndiceJhousep steven Mesia gonzalesNo ratings yet
- Pid 00209828Document68 pagesPid 00209828Antonio GutiNo ratings yet
- Apuntes Utf8modifDocument174 pagesApuntes Utf8modifSofy Luque100% (1)
- Asme - B30-23 PDFDocument872 pagesAsme - B30-23 PDFTeo Deustch75% (4)
- Diseño de ManholeDocument58 pagesDiseño de ManholeAndrés Amores Rivas100% (1)
- Algebra Lineal Matrices VectoresDocument60 pagesAlgebra Lineal Matrices VectoresLatex666No ratings yet
- Detección y compensación de irregularidades de inyecciónFrom EverandDetección y compensación de irregularidades de inyecciónNo ratings yet
- Métodos numéricos con introducción al método de Adomian y las series de FourierFrom EverandMétodos numéricos con introducción al método de Adomian y las series de FourierNo ratings yet
- Elementos de estadística descriptiva y probabilidadFrom EverandElementos de estadística descriptiva y probabilidadNo ratings yet
- Modelado unidimensional de los motores de dos tiempos de pequeña cilindradaFrom EverandModelado unidimensional de los motores de dos tiempos de pequeña cilindradaRating: 5 out of 5 stars5/5 (1)
- Tratamiento matemático:: una aproximación en Python y RFrom EverandTratamiento matemático:: una aproximación en Python y RNo ratings yet
- Predicción y optimización de emisiores y consumo mediante redes neuronales en motores diéselFrom EverandPredicción y optimización de emisiores y consumo mediante redes neuronales en motores diéselNo ratings yet
- Seagrass Sediment Sampling Protocol and Field Study British Columbia Washington EsDocument12 pagesSeagrass Sediment Sampling Protocol and Field Study British Columbia Washington EsgaboNo ratings yet
- Ciclo de Refrigeración Por GasDocument3 pagesCiclo de Refrigeración Por GasDano VillamarNo ratings yet
- Espacios RestringidosDocument14 pagesEspacios RestringidosLorena Rafael TaipeNo ratings yet
- Informe de Curvas de CalibraciónDocument11 pagesInforme de Curvas de CalibraciónSara RodríguezNo ratings yet
- Manual de PeleteríaDocument20 pagesManual de PeleteríaAnonymous cboNmA7VdNo ratings yet
- HIDRODINAMICADocument5 pagesHIDRODINAMICAMar BaVeNo ratings yet
- Problemas Soluciones Molares - PorcentajesDocument4 pagesProblemas Soluciones Molares - PorcentajesPaola moralesNo ratings yet
- Cementos en Ingeniería PetroleraDocument35 pagesCementos en Ingeniería PetroleraFernando Jimenez ChillonNo ratings yet
- Matrices EjerciciosDocument7 pagesMatrices EjerciciosCarmen723No ratings yet
- AUTOEVALUACIODocument4 pagesAUTOEVALUACIOluis_bernal67% (9)
- Informe 2 de BadinhoDocument16 pagesInforme 2 de BadinhoBadinho LopezNo ratings yet
- Resumen de AramidasDocument3 pagesResumen de AramidasAxel CrNo ratings yet
- PC 4-Tecnología de Los MaterialesDocument48 pagesPC 4-Tecnología de Los MaterialesJoel Andrés Santa Cruz Pérez100% (2)
- Laboratorio 2 - Fuerza ElectromotrizDocument11 pagesLaboratorio 2 - Fuerza ElectromotrizDavid VeraNo ratings yet
- Cadena de Transmisión.. Oring o Sin Orings.Document5 pagesCadena de Transmisión.. Oring o Sin Orings.Rosemberg Chica ValenciaNo ratings yet
- Reconocimiento y Manejo Del Material Basico de LaboratorioDocument9 pagesReconocimiento y Manejo Del Material Basico de LaboratorioKennai Black bearNo ratings yet
- NSK Ajustes y Juegos InternosDocument14 pagesNSK Ajustes y Juegos InternosMiguel Carlin JimenezNo ratings yet
- AB-IYO-ED-09-181-01.Recipientes A Presión PDFDocument29 pagesAB-IYO-ED-09-181-01.Recipientes A Presión PDFunfalsoimpostorNo ratings yet
- Transducción de SeñalesDocument15 pagesTransducción de SeñalesJ Javier LagrèzeNo ratings yet
- Norma e - 070Document15 pagesNorma e - 070Edin ZavaletaNo ratings yet
- Grupo B-Laboratorio 1Document15 pagesGrupo B-Laboratorio 1Rafael Jimenez de la cruzNo ratings yet
- EnsayosHuertosNarrativos Cortés Panyagua HesiquioDocument32 pagesEnsayosHuertosNarrativos Cortés Panyagua HesiquioMario Panyagua OrtizNo ratings yet
- Seguridad Minera Edición 149Document44 pagesSeguridad Minera Edición 149hans2013No ratings yet
- Ejercicios de Estructura de La Materia, Gases y FórmulasDocument2 pagesEjercicios de Estructura de La Materia, Gases y FórmulaspabloNo ratings yet
- ALNIBARDocument20 pagesALNIBARbeatrizNo ratings yet
- Hormigón Pretensado: Diego Arroyo Mayo 2012Document89 pagesHormigón Pretensado: Diego Arroyo Mayo 2012AlfredFloresCortezNo ratings yet
- Bombas Centrifugas Inoxidables Sanitarias 1Document3 pagesBombas Centrifugas Inoxidables Sanitarias 1Amanda MaedaNo ratings yet
- Informe LaderasDocument11 pagesInforme LaderasCrro OsmarNo ratings yet
- Clasificación de Los HeterociclosDocument4 pagesClasificación de Los HeterociclosJonathan HernandezNo ratings yet
- Ciclo de KrebsDocument14 pagesCiclo de KrebsAri Fernando Cabrera HerreraNo ratings yet