You might also like
- InfoDocument1 pageInfoPatrícia Valiati SouzaNo ratings yet
- FeiraDocument1 pageFeiraphmferreiraNo ratings yet
- PimsLeur - ApostilaDocument29 pagesPimsLeur - ApostilaGill100% (1)
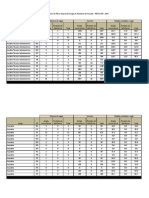
- Relacao Candidato X Vaga - PECFAZ-MF-2013Document5 pagesRelacao Candidato X Vaga - PECFAZ-MF-2013AlexsandrNo ratings yet
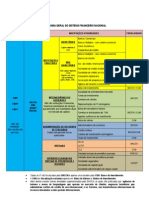
- Panorama Geral Sist Financeiro Nac PDFDocument1 pagePanorama Geral Sist Financeiro Nac PDFphmferreiraNo ratings yet
- Resumo Direito AdministrativoDocument72 pagesResumo Direito AdministrativoAline *Materiais de estudo para concursos*100% (1)
- Carlos Barbosa Atos Administrativos Parte 1Document10 pagesCarlos Barbosa Atos Administrativos Parte 1pacabea5161No ratings yet
- Questões Cesgranrio Da Lei 8112Document25 pagesQuestões Cesgranrio Da Lei 8112normasuelaNo ratings yet
- 497 Frases Filosóficas e de AmorDocument75 pages497 Frases Filosóficas e de AmorAntonio Graciano100% (1)
- (Neurose e Perversao Gemeas Do Seu OpostoDocument85 pages(Neurose e Perversao Gemeas Do Seu OpostoJosiane CecíliaNo ratings yet
- A Teoria Sociológica ContemporâneaDocument16 pagesA Teoria Sociológica ContemporâneaCesar Castelar QueirozNo ratings yet
- Ortóptica I 4 CRA PortalDocument61 pagesOrtóptica I 4 CRA PortalRUTH100% (1)
- Desenvolvimento EAprendizagem&Muito MaisDocument10 pagesDesenvolvimento EAprendizagem&Muito MaisJana LopesNo ratings yet
- Desenvolvimento Da EmpatiaDocument15 pagesDesenvolvimento Da EmpatiaFlorance CRNo ratings yet
- Resumo IPHCDocument16 pagesResumo IPHCLeticia FernandaNo ratings yet
- Corpo e Corporeidade No Teatro - Da Semiótica Às Neurociências. Pequeno Glossário Interdisciplinar.Document20 pagesCorpo e Corporeidade No Teatro - Da Semiótica Às Neurociências. Pequeno Glossário Interdisciplinar.GiammatteyNo ratings yet
- 1 Avaliação Com Linha Do TempoDocument4 pages1 Avaliação Com Linha Do TempoAngelica FSSNo ratings yet
- Concepção Histórico CulturalDocument11 pagesConcepção Histórico CulturalMagno AquinoNo ratings yet
- Seleccao e Organizacao de Estrategias e Actividades de Ensino-Aprendizagem - RibeiroDocument15 pagesSeleccao e Organizacao de Estrategias e Actividades de Ensino-Aprendizagem - RibeiroNuno Neto Ferreira100% (3)
- ROCHA, C. H. BASSO, E. A. (Orgs.) - Ensinar e Aprender Língua Estrangeira Nas Diferentes Idades Reflexões para Professores e Formadores. São Carlos Claraluz, 2008 PDFDocument6 pagesROCHA, C. H. BASSO, E. A. (Orgs.) - Ensinar e Aprender Língua Estrangeira Nas Diferentes Idades Reflexões para Professores e Formadores. São Carlos Claraluz, 2008 PDFjose erickNo ratings yet
- Desassossegadamente 11 Planificacao AnualDocument5 pagesDesassossegadamente 11 Planificacao AnualRosario LopesNo ratings yet
- A Influência Da Inteligência Artificial Na EducaçãoDocument12 pagesA Influência Da Inteligência Artificial Na Educaçãovanderlei.medeirosNo ratings yet
- Matriz de Competências PCAEDocument6 pagesMatriz de Competências PCAEVANESSA SANTANA QUEROZ BHERINGNo ratings yet
- Raízes Filsosóficas em Jung - Arthur ShopenhauerDocument14 pagesRaízes Filsosóficas em Jung - Arthur ShopenhauerAndrea MoscosoNo ratings yet
- Plano de Ensino Laboratório de CriatividadeDocument3 pagesPlano de Ensino Laboratório de CriatividadeanamargaritesNo ratings yet
- Aplicação NASA TLXDocument4 pagesAplicação NASA TLXAna De CarvalhoNo ratings yet
- Visão Computacional - Luiz Romário Santana RiosDocument8 pagesVisão Computacional - Luiz Romário Santana RiosTom BenevidesNo ratings yet
- Tipos e Formas Das FrasesDocument5 pagesTipos e Formas Das FrasesDercio Inacio TimbeNo ratings yet
- Fichamento Semana 2Document17 pagesFichamento Semana 2DayaneAveiroNo ratings yet
- PNAIC - Caderno 6 - ArteDocument104 pagesPNAIC - Caderno 6 - ArteLais Agnes100% (1)
- A Importância Do Lúdico - o Brincar Nas Práticas Pedagógicas Da Educação InfantilDocument10 pagesA Importância Do Lúdico - o Brincar Nas Práticas Pedagógicas Da Educação InfantilLeoNo ratings yet
- Planificação Anual - A1 e A2 - 2019 - 2020Document8 pagesPlanificação Anual - A1 e A2 - 2019 - 2020Pedro FerreiraNo ratings yet
- O Argumento Ontológico para A Existência de DeusDocument15 pagesO Argumento Ontológico para A Existência de DeusKleber Tavolaro OliveiraNo ratings yet
- Expansão Da Mente - Tarthang Tulku PDF PDF Mente VidaDocument1 pageExpansão Da Mente - Tarthang Tulku PDF PDF Mente VidavictoriaNo ratings yet
- EBook - Construir ResiliênciaDocument17 pagesEBook - Construir ResiliênciaCatarina CertalNo ratings yet
- 10 Gatilhos Mentais Que Deixa Qualquer Mulher Apaixonada PDFDocument28 pages10 Gatilhos Mentais Que Deixa Qualquer Mulher Apaixonada PDFHina HG100% (2)
- Psicologia Das OrganizaçõesDocument82 pagesPsicologia Das OrganizaçõesJosé Gregório Rojas NóbregaNo ratings yet
- Círculo Fluminense de Estudos Filológicos e Linguísticos: Soraia Aparecida Roques Pereira Nataniel Dos Santos GomesDocument10 pagesCírculo Fluminense de Estudos Filológicos e Linguísticos: Soraia Aparecida Roques Pereira Nataniel Dos Santos GomesValdemiro NhantumboNo ratings yet