You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- SP64Document122 pagesSP64gyayakbhutaNo ratings yet
- EL34 PP AmpDocument5 pagesEL34 PP AmpVasilis TsekourasNo ratings yet
- Environmental Assessment Report For Power PlantDocument76 pagesEnvironmental Assessment Report For Power Plantraj380% (1)
- National Electric Safety CodeDocument43 pagesNational Electric Safety CodeOmar Tintilay50% (2)
- Medium-Voltage Motor Starters and Protection: An Overview of Electrical and Mechanical InterlocksDocument3 pagesMedium-Voltage Motor Starters and Protection: An Overview of Electrical and Mechanical InterlocksOliver HermosaNo ratings yet
- Gayre-The Origin of The Zimbabwean Civilisation PDFDocument263 pagesGayre-The Origin of The Zimbabwean Civilisation PDFMantra ReiNo ratings yet
- Plumbing Design in High RIseDocument2 pagesPlumbing Design in High RIseyugerajd100% (1)
- Science 2-Q3-Module 1-Week 1-2 FINAL EDITEDDocument32 pagesScience 2-Q3-Module 1-Week 1-2 FINAL EDITEDChristy Mandazoc92% (12)
- Tutorial On Parallel Port InterfacingDocument7 pagesTutorial On Parallel Port InterfacingVasilis TsekourasNo ratings yet
- Q Bank MetDocument94 pagesQ Bank MetsajjadNo ratings yet
- Public Storm Warning SignalDocument16 pagesPublic Storm Warning SignalNiña Aerolyn B. ObbaniaNo ratings yet
- Task 4 Speaking TaskDocument4 pagesTask 4 Speaking TaskJorge Eduardo Alandete LopezNo ratings yet
- Discriminating Bacteria With Optical Sensors Based On Functionalized Nanoporous XerogelsDocument11 pagesDiscriminating Bacteria With Optical Sensors Based On Functionalized Nanoporous XerogelsVasilis TsekourasNo ratings yet
- Main Board Mic Pre AmpDocument1 pageMain Board Mic Pre AmpVasilis TsekourasNo ratings yet
- Wind Speed & RMS VoltageDocument6 pagesWind Speed & RMS VoltageVasilis TsekourasNo ratings yet
- YSI Dissolved Oxygen Membrane Selection Guide RevBDocument1 pageYSI Dissolved Oxygen Membrane Selection Guide RevBVasilis TsekourasNo ratings yet
- Wind Power MeteorologyDocument46 pagesWind Power MeteorologySanja StošićNo ratings yet
- RTL 8186Document50 pagesRTL 8186Maria Alejandra DalcolmoNo ratings yet
- Peavey - MK III Bass '79Document4 pagesPeavey - MK III Bass '79Vasilis TsekourasNo ratings yet
- 7.1. Identify The Parts of A Tropical CycloneDocument35 pages7.1. Identify The Parts of A Tropical Cycloneehlie canlasNo ratings yet
- Fluid Mechanics Partial III - Dimensionless Groups for Flow ProblemsDocument1 pageFluid Mechanics Partial III - Dimensionless Groups for Flow ProblemsCristianSuarezNo ratings yet
- Week 1 AssignmentDocument10 pagesWeek 1 AssignmentKenneth Ryan EbaldoneNo ratings yet
- Text 1: Answer The Following Questions Using Complete SentencesDocument10 pagesText 1: Answer The Following Questions Using Complete SentencesMohandas Naidu PerumalNo ratings yet
- Building Thermography Success with Proper SettingsDocument10 pagesBuilding Thermography Success with Proper SettingsayviwurbayviwurbNo ratings yet
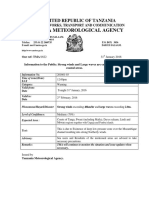
- Warning For Strong Winds and Large Waves/tahadhari Ya Upepo Mkali Na Mawimbi Makubwa 31/01/2016-02/02/2016.Document1 pageWarning For Strong Winds and Large Waves/tahadhari Ya Upepo Mkali Na Mawimbi Makubwa 31/01/2016-02/02/2016.Muhidin Issa MichuziNo ratings yet
- Wind Rose Plot AnalysisDocument1 pageWind Rose Plot AnalysisWilson Anthony Lazo TapiaNo ratings yet
- Design of An Axial Flux Permanent Magnet Wind Power Generator PDFDocument5 pagesDesign of An Axial Flux Permanent Magnet Wind Power Generator PDFFazal Karim MahsudNo ratings yet
- Quiz 5 - Tracking A TyphoonDocument1 pageQuiz 5 - Tracking A TyphoonPRIMELYN WAGASNo ratings yet
- Alemayehu Book 2006 Ethiopia Groundwater Occurrence Hydrogeological Water Quality AquiferDocument107 pagesAlemayehu Book 2006 Ethiopia Groundwater Occurrence Hydrogeological Water Quality AquiferAbiued Ejigue100% (5)
- The Aerodynamics of Argentavis The Worlds LargestDocument7 pagesThe Aerodynamics of Argentavis The Worlds LargestFermin ValerosNo ratings yet
- EPE MCQs MergedDocument105 pagesEPE MCQs MergedAbhijit Dakare100% (1)
- Evapco Equipment Layout Manual Brochure 311-E 04175Document20 pagesEvapco Equipment Layout Manual Brochure 311-E 04175Rudy HerreraNo ratings yet
- RODAN MANET LOOP Const PDFDocument64 pagesRODAN MANET LOOP Const PDFpraveen0907No ratings yet
- Wild Weather - Answer KeyDocument1 pageWild Weather - Answer KeyArianee AlonsoNo ratings yet
- The Success of Freshwater Fishpond Farming Depends On The Selection of Ideal Fishpond SiteDocument4 pagesThe Success of Freshwater Fishpond Farming Depends On The Selection of Ideal Fishpond SitecarmineNo ratings yet
- Most Popular Types of Sails On A Sailboat - Nomadic SailingDocument10 pagesMost Popular Types of Sails On A Sailboat - Nomadic Sailingsea13No ratings yet
- Influence of Wind Turbine Wakes on UAV FlightDocument28 pagesInfluence of Wind Turbine Wakes on UAV FlightGianc87No ratings yet
- Factors Affecting Climate DemoDocument13 pagesFactors Affecting Climate DemoCharity CotejoNo ratings yet