International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print),
ISSN 0976 6359(Online), Volume 5, Issue 5, May (2014), pp. 115-121 IAEME
115
TUNING OF AN I-PD CONTROLLER USED WITH A HIGHLY
OSCILLATING SECOND-ORDER PROCESS
Galal A. Hassaan
Emeritus Professor, Department of Mechanical Design & Production,
Faculty of Engineering, Cairo University, Giza, EGYPT
ABSTRACT
High oscillation in industrial processes is something undesired and controller tuning has to
solve this problems. I-PD is a controller type of the PID-family which is suggested to overcome this
problem with improved performance regarding the spike characteristics associated with certain types
of controllers. This research work has proven that using the I-PD is capable of solving the dynamic
problems of highly oscillating processes.
A second order process of 85.45 % maximum overshoot and 8 seconds settling time is
controlled using an I-PD controller (through simulation). The controller is tuned by minimizing the
sum of square of error (ISE) of the control system using MATLAB. The MATLAB optimization
toolbox is used assuming that the tuning problem is an unconstrained one. The result was cancelling
completely the 85.45 % overshoot and decreasing the settling time from 8 seconds to only 1.46
seconds without any undershoot. The performance of the control system using an I-PD controller
using the present tuning technique is compared with that using the ITAE standard forms tuning
technique.
Keywords: Highly oscillating processes I-PD controller - Optimal controller tuning Improving
control system performance.
1. INTRODUCTION
Highly oscillating response is present in a number of industrial processes incorporating low
damping levels. Conventionally, the PID controller is used and tuned for better performance of the
control system. The I-PD controller is one of the next generation of PID controllers where research
and application is required to investigate its effectiveness compared with PID controllers.
INTERNATIONAL JOURNAL OF MECHANICAL ENGINEERING
AND TECHNOLOGY (IJMET)
ISSN 0976 6340 (Print)
ISSN 0976 6359 (Online)
Volume 5, Issue 5, May (2014), pp. 115-121
IAEME: www.iaeme.com/ijmet.asp
Journal Impact Factor (2014): 7.5377 (Calculated by GISI)
www.jifactor.com
IJMET
I A E M E
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print),
ISSN 0976 6359(Online), Volume 5, Issue 5, May (2014), pp. 115-121 IAEME
116
Katsumata (1994) described a method for the auto-tuning of an I-PD controller for processes
with long dead time using neural networks [1]. Seraji (1998) introduced a class of simple nonlinear
PID-type controllers comprising a sector-bounded nonlinear gain in cascade with a linear fixed-gain
P, PD, PI or PID controller [2]. Lelic (1999) extracted the essence of the most recent development of
PID control during the 1990s based on a survey of 333 papers published in various journals [3].
Hamdan and Gao (2000) developed a modified PID (MPID) controller to control and minimize the
hysteresis effect in pneumatic proportional valves. The modified controller showed better command
following and disturbance rejection qualities than other types [4]. El-Sousi (2001) presented the
analysis, design and simulation of 1DOF and 2 DOF controllers for the indirect field orientated
control of an induction motor drive system [5]. Tagami and Ikeda (2002) proposed a design method
of robust I-PD controllers based on a genetic algorithm [6]. Araki and Taguchi (2003) surveyed the
important results about two degree of freedom PID controllers including equivalent transformations,
the effect of 2DOF structure and relation to the preceded derivative PID and the I-PD controllers [7].
Astrom and Hagglund (2004) presented a design method used to maximize the integral gain subject
to a robust constraint giving the best reduction of load disturbance. They revised tuning of PID
controllers in the spirit of Ziegler and Nichols technique [8]. Su, Sun and Duan (2005) proposed an
enhanced nonlinear PID controller with improved performance than the conventional linear fixed-
gain PID controller. They incorporated a sector-bounded nonlinear gain in cascade with the
conventional PID controller [9]. Li, Ang and Chong (2006) presented remedies for problems
involving the integral and derivative terms of the PID controller. They studied the PI-D and I-PD
control structures [10]. Arvanitis, Pasgianos and Kalogeropoulos (2007) investigated the control of
unstable second order plus dead-time process using PID-type controllers. They proposed tuning rules
based on the satisfaction of gain and phase margin specifications [11]. Madady (2008) proposed a
PID type with iterative learning control update law to control discrete-time SISO linear time-
invariant systems performing repetitive tasks. He proposed an optimal design method to determine
the PID parameters [12]. Coelho (2009) proposed a tuning method to determine the parameters of
PID control for an automatic regulator voltage system using chaotic optimization approach based on
Lozi map [13].
Khare (2010) developed an internal model mode based PID controller to control the
temperature of outlet fluid of the heat exchanger system. His controller demonstrated 84 %
improvement in overshoot and 44 % improvement in settling time compared to the classical
controller [14]. Ntogramatzidis and Ferrante (2011) introduced a range of techniques for the exact
design of PID controllers for feedback control problems involving requirements on the steady-state
performance and standard frequency domain specifications. The control parameters had to be
calculated on-line meaning that their techniques appear convenient with adaptive and self-tuning
control strategies [15]. Shiota and Ohmari (2012) proposed an adaptive I-PD controller using
augmented error method for SISO systems [16]. Prasad, Varghese and Malakrishnan (2012) designed
I-PD controller and optimized its parameters using particle swarm intelligence for a first order lag
integrating plus time delayed model [17]. Rajinikanth and Latha (2012) proposed a method to tune
the I-PD controller for the time-delayed unstable process using bacterial foraging optimization
algorithm [18]. Agalya and Nagaraj (2013) studied using a nonlinear feedback controller to control
continuous stirred tank reactors. They used PID and I-PD controller structures with integral square
error (ISE) criterion to tune the controllers [19]. Shiota and Ohmori (2013) proposed an adaptive I-
PD control scheme with variable reference model as one of the control schemes which overcome
model uncertainty. They showed the validity of their scheme through numerical simulation [20].
Hassaan (2014) presented a simple tuning approach to tune PID controllers used with both
underdamped and overdamped equivalent processes based on the integral square error (ISE) criterion
[21,22].
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print),
ISSN 0976 6359(Online), Volume 5, Issue 5, May (2014), pp. 115-121 IAEME
117
1. ANALYSIS
Process:
The process is a second order process having the parameters:
Natural frequency:
n
= 10 rad/s
Damping ratio: = 0.05
The process has the transfer function:
M
p
(s) =
n
2
/ (s
2
+ 2
n
s +
n
2
) (1)
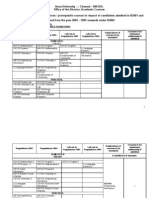
The time response of this process to a unit step input is shown in Fig.1 as generated by MATLAB:
Fig.1 Step response of the uncontrolled process.
The severity of the process oscillations is measured by its maximum percentage overshoot. It
has a maximum overshoot of 85.4 % and an 6 seconds settling time.
Controller:
The controller used in this study is an integral (I) - proportional derivative (PD) controller. In
this controller, the integral part acts only on the error e of the closed loop control system
incorporating the controller and the controlled process. The proportional and derivative parts act on
the system output y. By this it is possible to get red of the kick following a reference input change
(set-point kick) as quoted by Prasad, Varghese and Balakrishnan [17]. The block diagram of the
closed-loop control system incorporating the I-PD controller is shown in Fig.2 [17].
controller
Fig.2 I-PD controller.
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print),
ISSN 0976 6359(Online), Volume 5, Issue 5, May (2014), pp. 115-121 IAEME
118
The controller model is function of the control system three variables:
- Control system error, E(s).
- Controller output, U(s).
- Control system output, Y(s).
Using the block diagram of Fig.2, the 3 variables are related through the model:
U(s) = (K
i
/s)R(s) (K
pc
+ K
d
s + K
i
/s)Y(s) (2)
Where: K
pc
= Proportional gain
K
i
= Integral gain
K
d
= Derivative gain
i.e. the controller has 3 parameters to be identified to control the process and produce a satisfactory
performance.
Control System Transfer Function:
U(s) is related to Y(s) through the process transfer function, G
p
(s). That is:
G
p
(s) = Y(s) / U(s) (3)
Combining Eqs.2 and 3 gives the transfer function of the closed-loop system as:
M(s) = b
0
/ {a
0
s
3
+ a
1
s
2
+ a
2
s + a
3
} (4)
where:
b
0
=
n
2
K
i
, a
0
= 1
a
1
= 2
n
+
n
2
K
d
, a
2
=
n
2
(1 + K
pc
)
a
3
=
n
2
K
i
System Step Response:
A unit step response is generated by MATLAB using the numerator and deniminator of Eq. 3
providing the system response c(t) as function of time [23].
2. CONTROLLER TUNING
The sum of square of error (ISE) is used an objective function, F of the optimization process.
Thus:
F = [c(t) c
ss
]
2
dt (5)
where c
ss
= steady state response of the system.
The performance of the control system is judged using two time-based specifications:
(a) Maximum percentage overshoot, OS
max
(b) Settling time, T
s
Tuning Results:
The MATLAB command "fminunc" is used to minimize the optimization objective function
given by Eq.5 without any parameters ot functional constraints [24]. The results are as follows:
Controller parameters:
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print),
ISSN 0976 6359(Online), Volume 5, Issue 5, May (2014), pp. 115-121 IAEME
119
K
pc
= 1.7523
K
i
= 5.3314
K
d
= 0.1113
The time response of the closed-loop control system to a unit step input is shown in Fig.3.
Fig.3 Step response of the I-PD controlled second order process.
Characteristics of the control system using the tuned I-PD controller:
- Maximum percentage overshoot: 0 %
- Maximum percentage undershoot: 0 %
- Settling time: 1.46 s
3. COMPARISON WITH STANDARD FORMS TUNING
The control system in terms of its transfer function is a fourth order one. The optimal
characteristic equation of such a system with a second-order numerator is given using an ITAE
critertion by [25]:
s
3
+ 1.75
o
s
2
+ 2.15
o
2
s +
o
3
(6)
Comparing Eq.6 with the corresponding one in Eq.4 we get 3 equations in
o
, K
pc
, K
i
and K
d
i.e. 4 unknowns and 3 equations. To be able to get the controller parameters using this tuning
technique, one of the parameters has to be assumed. It was reasonable from the equations to assign
K
i
(it was taken as 5.3314 as obtained in the present tuning technique using the ISE criterion). The
rest of the controller parameters were calculated as:
K
pc
= 0.4136
K
i
= 5.3314
K
d
= 0.1319
The time response of the control system using this standard forms tuning technique is shown in
Fig.4:
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print),
ISSN 0976 6359(Online), Volume 5, Issue 5, May (2014), pp. 115-121 IAEME
120
Fig.4 Step response of the I-PD controlled second order process using the ITAE standard forms.
Characteristics of the control system using the standard forms tuning technique:
- Maximum percentage overshoot: 1.98 %
- Maximum percentage undershoot: 2.35 %
- Settling time: 0.44 s
4. CONCLUSIONS
- It is possible to suppress completely the higher oscillations in processes through using the I-PD
controller.
- It was possible to overcome the set-point kick problem associated with the standard PID.
- Through using an I-PD controller it was possible reduce the settling time from about 8 seconds
to about 1.46 seconds indicating the fast settlement of the controlled process.
- The maximum and minimum overshoot were cancelled completely .
- Tuning the controller using standard forms produced a time response of the closed loop system
having more overshoot and undershoot (1.98 % and 2.35 % respectively).
- However, the settling time was better in the standard forms technique than the present
technique based on ISE error criterion.
REFERENCES
1. K. Katsumata (1994), A predictive I-PD controller for processes with long deadtime using
neural networks, IEEE World Congress on Computational Intelligence, 27 June 2 July ,
pp.3154-3157.
2. H. Seraji (1998), A new class of nonlinear PID controllers, J. of Robotic Systems, Vol.15,
No.3, March 1998, pp.161-181.
3. M. Lelic 1999), PID controllers in nineties, Corning Incorporation, Science & Technology
Division, Corning, N.Y., 12 July.
4. M. Hamdan and Z. Gao (2000), A novel PID controller for pneumatic proportional valves
with hysterisis, IEEE Industry Applications Conference, October , Vol.2, pp.1198-1201.
5. F. El-Sousy (2001), Design and implementation of 2DOF I-PD controller for indirect field
orientation control induction machine drive system, IEEE Int. Symposium on Industrial
Electronics, Vol.2, pp.1112-1118.
International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print),
ISSN 0976 6359(Online), Volume 5, Issue 5, May (2014), pp. 115-121 IAEME
121
6. T. Tagami and K. Ikeda (2002), A design of robust I-PD controller based on genetic
algorithm, Modelling, Identification and Control, February 18-21.
7. M. Araki and H. Taguchi (2003), Two-degree of freedom PID controllers, Int. J. of Control,
Automation and Systems, Vol.1, No.4, pp.401-411.
8. K. Astrom and T. Hagglund (2004), Revisiting the Ziegler-Nichols step response method for
PID control, J. of Process Control, Vol.14, pp.635-650.
9. Y. Su, D. Sun and B. Duan (2005), Design of an enhanced nonlinear PID controller,
Mechatronics, Vol.15, pp.1005-1024.
10. Y. Li, K. Ang and G. Chong (2006), PID control system analysis and design, IEEE Control
Systems Magazine, Vol.26, No.1, pp.32-41.
11. K. Arvanitis, G. Pasgianos and G. Kalloeropoulos (2007), Tuning PID controllers for a class
of unstable dead-time processes based on stability margins specifications, Proceedings of the
15
th
Mediterranean Conference on Control and Automation, July 27-29, Athena, Greece.
12. A. Madady (2008), PID-type iterative learning control with optimal gains, Int. J. of Control,
Automation and Systems, Vol.6, No.2, April , pp.194-203.
13. L. Coelho (2009), Tuning of PID controller for an automatic regulator voltage system using
chaoticn optimization approach, Chaos, Solitons and Fractals, Vol.39, pp.1504-1514.
14. Y. Khare (2009), PID control of heat exchanger systems, Int. J. of Computer Applications,
Vol.8, No.6, October, pp.22-27.
15. L. Ntogramatzidis and A. Ferrante (2011), Exact tuning of PID controllers in control feedback
design, Proceedings of the 18
th
IFAC World Congress, Milano, Italy, August 28-September 2,
pp.5759-5764.
16. T. Shiota and H. Ohmori (2012), Design of adaptive I-PD controller using augmented error
method, IFAC Conference on Advances in PID Control, Brescia, Italy, March 28-30.
17. S. Prasad, S. Varghese and P. Balakrishnan (2012), Optimization of I-PD controller for a
FOLIPD model using particle swarm intelligence, Int. J. of Computer Applications, Vol.43,
No.9, April 2012, pp.23-26.
18. V. Rajinikanth and K. Latha (2012), I-PD controller tuning for unstable system using
bacterial foraging algorithm, Applied Computational Intelligence and Soft Computing,
Vol.2012, Article ID 329389.
19. A. Agalya and B. Nagaraj (2013), Certain investigation on concentration control of CSTR- A
comparative approach, International Journal of Advances in Soft Computing and its
Application, Vol.5, No.2, July, pp.1-14.
20. T. Shiota and H. Ohmori (2013), Design of adaptive I-PD control system with variable
reference model, 3
rd
Australian Control Conference (AUCC), 4-5 November, pp.115-120.
21. G.A. Hassaan (2014), Simple tuning of PID-controllers used with underdamped second-order
processes, International Journal of Mechanical and Production Engineering Research and
Development, Vol.4, No.2, Accepted for Publication.
22. G.A. Hassaan (2014), Simple tuning of PID-controllers used with overdamped second-order
processes, International Journal of Research in Engineering and Technology, Vol.2, No.4,
pp.87-96.
23. ------ (2012), "Control system toolbox", MathWorks, September.
24. ------ (1998-2012), The MOSEK optimization toolbox for MATLAB, MOSEK, Denmark.
25. D. Graham and R. Lathrop (1953), The synthesis of optimal response: criteria and standard
forms, Transactions of AIEE, Vol.72, November.
26. Galal A. Hassaan, Optimal Design of Machinery Shallow Foundations With Clay Soils
International Journal of Mechanical Engineering & Technology (IJMET), Volume 5, Issue 3,
2014, pp. 91 - 103, ISSN Print: 0976 6340, ISSN Online: 0976 6359.
You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Visualising Aging Parents & Their Close Carers Life Journey in Aging EconomyDocument4 pagesVisualising Aging Parents & Their Close Carers Life Journey in Aging EconomyIAEME PublicationNo ratings yet
- Determinants Affecting The User's Intention To Use Mobile Banking ApplicationsDocument8 pagesDeterminants Affecting The User's Intention To Use Mobile Banking ApplicationsIAEME PublicationNo ratings yet
- Analyse The User Predilection On Gpay and Phonepe For Digital TransactionsDocument7 pagesAnalyse The User Predilection On Gpay and Phonepe For Digital TransactionsIAEME PublicationNo ratings yet
- A Study On The Reasons For Transgender To Become EntrepreneursDocument7 pagesA Study On The Reasons For Transgender To Become EntrepreneursIAEME PublicationNo ratings yet
- Broad Unexposed Skills of Transgender EntrepreneursDocument8 pagesBroad Unexposed Skills of Transgender EntrepreneursIAEME PublicationNo ratings yet
- Gandhi On Non-Violent PoliceDocument8 pagesGandhi On Non-Violent PoliceIAEME PublicationNo ratings yet
- Voice Based Atm For Visually Impaired Using ArduinoDocument7 pagesVoice Based Atm For Visually Impaired Using ArduinoIAEME PublicationNo ratings yet
- Modeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyDocument14 pagesModeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyIAEME PublicationNo ratings yet
- Impact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesDocument10 pagesImpact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesIAEME PublicationNo ratings yet
- A Multiple - Channel Queuing Models On Fuzzy EnvironmentDocument13 pagesA Multiple - Channel Queuing Models On Fuzzy EnvironmentIAEME PublicationNo ratings yet
- A Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurDocument7 pagesA Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurIAEME PublicationNo ratings yet
- Influence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiDocument16 pagesInfluence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiIAEME PublicationNo ratings yet
- A Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaDocument9 pagesA Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaIAEME PublicationNo ratings yet
- Attrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesDocument15 pagesAttrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesIAEME PublicationNo ratings yet
- Role of Social Entrepreneurship in Rural Development of India - Problems and ChallengesDocument18 pagesRole of Social Entrepreneurship in Rural Development of India - Problems and ChallengesIAEME PublicationNo ratings yet
- A Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiDocument16 pagesA Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiIAEME PublicationNo ratings yet
- EXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESDocument9 pagesEXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESIAEME PublicationNo ratings yet
- Moderating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorDocument7 pagesModerating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorIAEME PublicationNo ratings yet
- Various Fuzzy Numbers and Their Various Ranking ApproachesDocument10 pagesVarious Fuzzy Numbers and Their Various Ranking ApproachesIAEME PublicationNo ratings yet
- A Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksDocument10 pagesA Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksIAEME PublicationNo ratings yet
- Optimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsDocument13 pagesOptimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsIAEME PublicationNo ratings yet
- Application of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDDocument19 pagesApplication of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDIAEME PublicationNo ratings yet
- Knowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentDocument8 pagesKnowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentIAEME PublicationNo ratings yet
- Dealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsDocument8 pagesDealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsIAEME PublicationNo ratings yet
- Financial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelDocument9 pagesFinancial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelIAEME PublicationNo ratings yet
- Quality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceDocument7 pagesQuality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceIAEME PublicationNo ratings yet
- Analysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsDocument13 pagesAnalysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsIAEME PublicationNo ratings yet
- Prediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsDocument13 pagesPrediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsIAEME PublicationNo ratings yet
- Analysis On Machine Cell Recognition and Detaching From Neural SystemsDocument9 pagesAnalysis On Machine Cell Recognition and Detaching From Neural SystemsIAEME PublicationNo ratings yet
- A Review of Particle Swarm Optimization (Pso) AlgorithmDocument26 pagesA Review of Particle Swarm Optimization (Pso) AlgorithmIAEME PublicationNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Assignment - 4Document2 pagesAssignment - 4Hardeep SinghNo ratings yet
- Meanwell SMPS CATLOGUE.Document1 pageMeanwell SMPS CATLOGUE.rajstarNo ratings yet
- 3ADW000163R0201 - Technical Guide - e - B PDFDocument28 pages3ADW000163R0201 - Technical Guide - e - B PDFAhmed MoustafaNo ratings yet
- Dracast Led1000 Fresnel Series Info SheetDocument2 pagesDracast Led1000 Fresnel Series Info SheetJohnNo ratings yet
- Catalogo Numatics 554SA400K046T30Document25 pagesCatalogo Numatics 554SA400K046T30Jair Mata Cuenca100% (1)
- MC14528B Dual Monostable Multivibrator: PDIP-16 P Suffix CASE 648Document12 pagesMC14528B Dual Monostable Multivibrator: PDIP-16 P Suffix CASE 648catsoithahuong84No ratings yet
- E3423 P5KPL-VMDocument94 pagesE3423 P5KPL-VMfreimannNo ratings yet
- TD Docomo IntegrationDocument3 pagesTD Docomo IntegrationVishal SuryawaniNo ratings yet
- VB Instrument - Induction Motor Current Analysis - Support - CommtestDocument5 pagesVB Instrument - Induction Motor Current Analysis - Support - CommtestaabejaroNo ratings yet
- PMIC System HW-Validation EngineerDocument3 pagesPMIC System HW-Validation EngineerSai KrishnaNo ratings yet
- HCB User ManualDocument3 pagesHCB User ManualJesús David Diaz MontesNo ratings yet
- SRP-6MA (-HV) : Key FeaturesDocument2 pagesSRP-6MA (-HV) : Key FeaturesNanangDatadikJatimNo ratings yet
- Battery 3214-30Document43 pagesBattery 3214-30herrisutrisna100% (4)
- Chapter 8 State Space AnalysisDocument22 pagesChapter 8 State Space AnalysisAli AhmadNo ratings yet
- Danfoss Scroll Compressors in Parallel Installation SMSYSZDocument48 pagesDanfoss Scroll Compressors in Parallel Installation SMSYSZNikolas Chionas100% (1)
- AMT 211-3, Ignition - Group 1Document4 pagesAMT 211-3, Ignition - Group 1Earl Michaelo R. KalacasNo ratings yet
- Anna University: : Chennai - 600 025. Office ofDocument8 pagesAnna University: : Chennai - 600 025. Office ofafzalbaigsa100% (2)
- ARINC 429 to Synchro Converter Model 44SM7Document3 pagesARINC 429 to Synchro Converter Model 44SM7ekinox_es100% (1)
- Numerical Busbar Protection: Technical Data SheetDocument24 pagesNumerical Busbar Protection: Technical Data SheetamitdhamijaNo ratings yet
- Home Power Magazine - Wind Power BasicsDocument9 pagesHome Power Magazine - Wind Power BasicsradurusNo ratings yet
- 1280-060 DatasheetDocument43 pages1280-060 DatasheetRamesh RautNo ratings yet
- Small Wind Energy Systems 110702042021 Small Wind GuideDocument25 pagesSmall Wind Energy Systems 110702042021 Small Wind GuideAsad IqbalNo ratings yet
- PDFDocument21 pagesPDFThuso SebinaNo ratings yet
- P54d en 2048 PDFDocument8 pagesP54d en 2048 PDFSi DidiksNo ratings yet
- Phison Flash Controller SpecificationDocument19 pagesPhison Flash Controller SpecificationgreemaxNo ratings yet
- ComAp Marine Brochure 2011-11 CPCEMARIDocument52 pagesComAp Marine Brochure 2011-11 CPCEMARIsdiaman100% (1)
- 2VAA000720R0001 A en S Control Harmony Bridge Controller With Ethernet (BRC-410) User ManualDocument95 pages2VAA000720R0001 A en S Control Harmony Bridge Controller With Ethernet (BRC-410) User ManualanbarasanNo ratings yet
- ECM and EDMDocument23 pagesECM and EDMVinay KumarNo ratings yet
- Generator Set Data Sheet: Fuel ConsumptionDocument3 pagesGenerator Set Data Sheet: Fuel ConsumptionJohn CardonaNo ratings yet
- Data Aire Brochure Web Version v4Document4 pagesData Aire Brochure Web Version v4dnps2011No ratings yet