You might also like
- Weld Consumable CalculatorDocument7 pagesWeld Consumable Calculatorjappozander86% (7)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- 15 Explosion Calculations Sup1 SiDocument3 pages15 Explosion Calculations Sup1 Sigharavii2063No ratings yet
- Thermodynamics: Engr. Renel M. AlucijaDocument48 pagesThermodynamics: Engr. Renel M. AlucijaRenel AluciljaNo ratings yet
- VLF Radio Engineering: International Series of Monographs in Electromagnetic WavesFrom EverandVLF Radio Engineering: International Series of Monographs in Electromagnetic WavesNo ratings yet
- D4402Document2 pagesD4402borisov2009No ratings yet
- Centroid of Plane FiguresDocument40 pagesCentroid of Plane FiguresOnetwothreefourfunk79% (19)
- Grade 8 Science 1st Quarter ExamDocument5 pagesGrade 8 Science 1st Quarter ExamMjoyTibay100% (28)
- Beam Element in FEM/FEADocument24 pagesBeam Element in FEM/FEAOnkar KakadNo ratings yet
- Anchor Bolts in Tension and Shear-2Document7 pagesAnchor Bolts in Tension and Shear-2Nithin Kannan100% (1)
- What Is An AsanaDocument16 pagesWhat Is An AsanaNithin KannanNo ratings yet
- 2D Triangular ElementsDocument24 pages2D Triangular ElementsAmmir SantosaNo ratings yet
- Ci33 1112 Pernos de AnclajeDocument10 pagesCi33 1112 Pernos de AnclajeShadin Asari ArabaniNo ratings yet
- Electric and Magnetic Fields Answers To Assignment 3Document5 pagesElectric and Magnetic Fields Answers To Assignment 3ShootingStarPhotonsNo ratings yet
- Hazen Williams EquationDocument5 pagesHazen Williams Equationprabhjot123100% (1)
- Principles of Communication 5ed R. E. Ziemer, William H. Tranter Solutions ManualDocument329 pagesPrinciples of Communication 5ed R. E. Ziemer, William H. Tranter Solutions Manualinfusion3No ratings yet
- Lasip National High School: School: Teacher: Year and Section: Subject and Time: Date(s)Document3 pagesLasip National High School: School: Teacher: Year and Section: Subject and Time: Date(s)Pepito Rosario Baniqued, JrNo ratings yet
- Thermodynamics I Chapter 3 Steam Tables Mastery Exercises Set 3Document3 pagesThermodynamics I Chapter 3 Steam Tables Mastery Exercises Set 3jr gajeles100% (1)
- Emfesoln chp08 PDFDocument26 pagesEmfesoln chp08 PDFvakilgaurangiNo ratings yet
- Fundamental MachinesDocument20 pagesFundamental MachinesMica GrandNo ratings yet
- Solutions A-03 Applied Mechanics: (June 2003)Document24 pagesSolutions A-03 Applied Mechanics: (June 2003)AdzLinkBalaoangNo ratings yet
- Differetial GeometryDocument10 pagesDifferetial GeometrySunilKumarNo ratings yet
- Irles - Rectangular FootingDocument7 pagesIrles - Rectangular FootingAldo Jesús Casanova LinaresNo ratings yet
- Calculus BC QuestionsDocument21 pagesCalculus BC QuestionsMurugananthenNo ratings yet
- Relativistic KinematicsDocument12 pagesRelativistic KinematicsAshim DuttaNo ratings yet
- Mse 2183 Assignment 3Document22 pagesMse 2183 Assignment 3MarkusNo ratings yet
- Entroid AND Oment OF NertiaDocument19 pagesEntroid AND Oment OF Nertialatendra kumar srivastavNo ratings yet
- CentroidDocument19 pagesCentroidragupathiindia100% (1)
- CHAP 4. Finite Element Analysis With Beam: 4.1. Total Potential Energy of BeamDocument24 pagesCHAP 4. Finite Element Analysis With Beam: 4.1. Total Potential Energy of Beamteknikpembakaran2013No ratings yet
- More Maximumminimum Problems. Reflection and RefractionDocument6 pagesMore Maximumminimum Problems. Reflection and RefractionRaul Humberto Mora VillamizarNo ratings yet
- 2004 Exam02Document6 pages2004 Exam02sure77No ratings yet
- 2011 GCE A Level Solution H2 Math Paper 2Document12 pages2011 GCE A Level Solution H2 Math Paper 2lacewingNo ratings yet
- Right Triangles and The Pythagorean Triplets: Base Triplet Base TripletDocument8 pagesRight Triangles and The Pythagorean Triplets: Base Triplet Base TripletSunil Kumar MaharanaNo ratings yet
- CHPT 7Document51 pagesCHPT 7jimbob7410No ratings yet
- Engineering MechanicDocument24 pagesEngineering MechanicManoj BallaNo ratings yet
- Some Useful Integrals of Exponential Functions: Michael FowlerDocument6 pagesSome Useful Integrals of Exponential Functions: Michael FowlerSunny HungNo ratings yet
- Beam DeflectionsDocument21 pagesBeam Deflectionslovepink_17No ratings yet
- Engineering Council Diploma Level Mechanics of Solids D209 Tutorial 1 - Advanced Second Moments of AreaDocument7 pagesEngineering Council Diploma Level Mechanics of Solids D209 Tutorial 1 - Advanced Second Moments of ArearianrureNo ratings yet
- ECE 5324/6324 Notes: Om P. GandhiDocument81 pagesECE 5324/6324 Notes: Om P. GandhiKarina LesanoNo ratings yet
- Appendix D Basic Basic Engineering Engineering Calculations CalculationsDocument25 pagesAppendix D Basic Basic Engineering Engineering Calculations CalculationsaakashtrivediNo ratings yet
- Additional Prob Set 3Document10 pagesAdditional Prob Set 3samarth111111111No ratings yet
- 99ebook Com ErrataDocument12 pages99ebook Com ErrataghalzaiNo ratings yet
- Unit2 - Design of Cotter JointsDocument21 pagesUnit2 - Design of Cotter JointsKunal AhiwaleNo ratings yet
- Max & Min TheoryDocument13 pagesMax & Min TheorycataiceNo ratings yet
- Machine Tool Drive and Mechanism Part IIDocument42 pagesMachine Tool Drive and Mechanism Part IItsehay habesaNo ratings yet
- ElasticityPolars 03 AxiSymmetricDocument11 pagesElasticityPolars 03 AxiSymmetricJamshid PishdadiNo ratings yet
- Fundamentals of Ultrasonic Phased Arrays - 41-50Document10 pagesFundamentals of Ultrasonic Phased Arrays - 41-50Kevin HuangNo ratings yet
- Function Generation Using Freudenstein's EquationDocument15 pagesFunction Generation Using Freudenstein's Equationvenkatanaveen306No ratings yet
- Hollow Waveguide TapersDocument6 pagesHollow Waveguide Tapersgeodinger9316No ratings yet
- c4l2 Double Integrals Over Nonrectangular RegionDocument16 pagesc4l2 Double Integrals Over Nonrectangular RegionScot WatkinsNo ratings yet
- 2014-2-Ns-Kgv Mathematics T 954/2 Section A (45 Marks)Document3 pages2014-2-Ns-Kgv Mathematics T 954/2 Section A (45 Marks)HengLowNo ratings yet
- Winches and Reels Tension in Line and Pressure On The Drum and Flanges PDFDocument18 pagesWinches and Reels Tension in Line and Pressure On The Drum and Flanges PDFjosebernal_mzaNo ratings yet
- BF 01040819Document4 pagesBF 01040819gabrieltamas7890No ratings yet
- Solutions For Homework #7: Problem 1Document15 pagesSolutions For Homework #7: Problem 1xmanix2012No ratings yet
- Problem Set #10 Solution 1.050 Solid Mechanics Fall 2004: in A in ADocument3 pagesProblem Set #10 Solution 1.050 Solid Mechanics Fall 2004: in A in AGersonNo ratings yet
- Ls Dyna BeamsDocument18 pagesLs Dyna BeamsAleem Ullah CheemaNo ratings yet
- MTH207 Lab 1 HomeworkDocument4 pagesMTH207 Lab 1 HomeworkCarolyn WangNo ratings yet
- Circumference of An EllipseDocument4 pagesCircumference of An Ellipsemanuel_alejandro88100% (1)
- Computational Hydrogen: exp (− c α r Hc = EscDocument4 pagesComputational Hydrogen: exp (− c α r Hc = Esc周子暄No ratings yet
- Lectures 4-5 Chapter 4 Fall 2009Document27 pagesLectures 4-5 Chapter 4 Fall 2009tewari_skNo ratings yet
- PHY103 MidSem SolutionsDocument9 pagesPHY103 MidSem SolutionsShreyaNo ratings yet
- Torsion of Circular SectionsDocument10 pagesTorsion of Circular SectionsOlabisi Isaac ShoyodeNo ratings yet
- Solution To Assignment 02Document6 pagesSolution To Assignment 02Alexander JolleyNo ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- General Aspects of Container G.A.: SDS SEM-6thDocument16 pagesGeneral Aspects of Container G.A.: SDS SEM-6thNithin KannanNo ratings yet
- Welding in ShipbuildingDocument42 pagesWelding in ShipbuildingRishikesh KaushikNo ratings yet
- Transition From Wood To SteelDocument24 pagesTransition From Wood To SteelNithin KannanNo ratings yet
- Wood As A Shipbuilding MaterialDocument20 pagesWood As A Shipbuilding MaterialNithin KannanNo ratings yet
- Composite MaterialsDocument23 pagesComposite MaterialsNithin KannanNo ratings yet
- RivetsDocument30 pagesRivetsAdarsh RavindranNo ratings yet
- Scan - TMS - Stay Safe - 20200412 - 093331Document1 pageScan - TMS - Stay Safe - 20200412 - 093331Nithin KannanNo ratings yet
- 15m Aluminium Gangway - Qty 01: A. MTODocument2 pages15m Aluminium Gangway - Qty 01: A. MTONithin KannanNo ratings yet
- EO-220717-PI-0101 Piping MTO R.ADocument3 pagesEO-220717-PI-0101 Piping MTO R.ANithin KannanNo ratings yet
- Thread CalculationsDocument2 pagesThread CalculationsilyaskureshiNo ratings yet
- Test Bay Design Procedure Rev0Document3 pagesTest Bay Design Procedure Rev0Nithin KannanNo ratings yet
- Ncert Physics Calss 11 Chapter - 1Document15 pagesNcert Physics Calss 11 Chapter - 1annuagrawal_vnsNo ratings yet
- Mit2 019S11 SK1Document15 pagesMit2 019S11 SK1Hasib Ul Haque AmitNo ratings yet
- AutoCAD Shortcuts 11x8.5 MECH-REV PDFDocument11 pagesAutoCAD Shortcuts 11x8.5 MECH-REV PDFKristijan BorasNo ratings yet
- Mud Skip Details-1Document1 pageMud Skip Details-1Nithin KannanNo ratings yet
- AMOS TutorialDocument50 pagesAMOS TutorialPolksjh SdjqlwNo ratings yet
- Data MaterialsDocument40 pagesData Materialsjeff_56No ratings yet
- Operating Instructions: Katflow 100Document52 pagesOperating Instructions: Katflow 100Nithin KannanNo ratings yet
- 1.-F.O.PUMP (On Board) - DELTA PUMP Norge/Type-DELTA 600-112SX/Capacity-7, 4 M3/hDocument3 pages1.-F.O.PUMP (On Board) - DELTA PUMP Norge/Type-DELTA 600-112SX/Capacity-7, 4 M3/hNithin KannanNo ratings yet
- Storage Tank 3DDocument1 pageStorage Tank 3DNithin KannanNo ratings yet
- Tutorial AutoShipDocument180 pagesTutorial AutoShipChahbi Ramzi100% (1)
- HistoryDocument5 pagesHistoryNithin KannanNo ratings yet
- Wind ProfilesDocument11 pagesWind ProfilesNithin KannanNo ratings yet
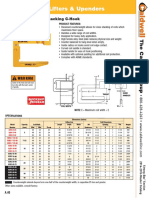
- Coil Lifters & Upenders: Model 82RC - Close Stacking C-HookDocument1 pageCoil Lifters & Upenders: Model 82RC - Close Stacking C-HookNithin KannanNo ratings yet
- WindScanner Remote Sensing of WindDocument14 pagesWindScanner Remote Sensing of WindNithin KannanNo ratings yet
- CLSU - Agricultural Machine DesignDocument29 pagesCLSU - Agricultural Machine DesignJohn CennaNo ratings yet
- Module 28 Solution Brittle Coulomb Mohr TheoryDocument2 pagesModule 28 Solution Brittle Coulomb Mohr TheoryWolf LordNo ratings yet
- MCQ Unit 4 Analysis of StructuresDocument5 pagesMCQ Unit 4 Analysis of StructuresAjit MoreNo ratings yet
- Module On ThermochemistryDocument9 pagesModule On Thermochemistryakladffja100% (1)
- Reviewer in ScienceDocument4 pagesReviewer in ScienceJan Scarlett LagamayoNo ratings yet
- AITS 2018 ScheduleDocument2 pagesAITS 2018 SchedulewefWE50% (2)
- 2022 - Pete 350 - Part B - 2Document35 pages2022 - Pete 350 - Part B - 2Alexander AntwiNo ratings yet
- Optimizing The Use of Swimmer Bars As Shear Reinforcement in TheDocument8 pagesOptimizing The Use of Swimmer Bars As Shear Reinforcement in TheAbel MulugetaNo ratings yet
- Data Sheet G-Fit Shock Absorb Advanced ENDocument2 pagesData Sheet G-Fit Shock Absorb Advanced ENSK C&T - KEO ỐP LÁT, CHỐNG THẤM.No ratings yet
- Flexural Strength Enhancement of Confined Reinforced Concrete ColumnsDocument8 pagesFlexural Strength Enhancement of Confined Reinforced Concrete ColumnsKunalNo ratings yet
- Wall Footing: Code ReferencesDocument4 pagesWall Footing: Code ReferencesSupun Aravinda JayawardhaneNo ratings yet
- CHEM20024 Lecture Notes 11 - Free Energy and EquilibriumDocument27 pagesCHEM20024 Lecture Notes 11 - Free Energy and EquilibriumEzriel QuantumNo ratings yet
- Cambridge International AS & A Level: PHYSICS 9702/22Document20 pagesCambridge International AS & A Level: PHYSICS 9702/22Abdullah ShahzadNo ratings yet
- Propellers NAME: A. Manish Kumar ROLLNO: 319106918066 Overlapping PropellersDocument9 pagesPropellers NAME: A. Manish Kumar ROLLNO: 319106918066 Overlapping Propellersmanish alahariNo ratings yet
- Design and Analysis of Disc Brake System in High Speed VehiclesDocument9 pagesDesign and Analysis of Disc Brake System in High Speed Vehiclessavio pullkotilNo ratings yet
- Classical Electromagnetism by Richard Fitzpatrick PDFDocument307 pagesClassical Electromagnetism by Richard Fitzpatrick PDFadimeghaNo ratings yet
- Unit-1 IGNOuDocument20 pagesUnit-1 IGNOuŞhŕůťí MîšhřāNo ratings yet
- Structural Analysis and Design Report of Residential BuildingDocument44 pagesStructural Analysis and Design Report of Residential BuildingSandip BudhathokiNo ratings yet
- Creep and Shrinkage IRC 112-2011Document3 pagesCreep and Shrinkage IRC 112-2011naveen srinivasNo ratings yet
- SUVAT QuestionsDocument1 pageSUVAT Questionssaud ahmedNo ratings yet
- C StrucDesign Feygin July121Document4 pagesC StrucDesign Feygin July121Al-Razzaq Al-WahhabNo ratings yet
- B15 Vibrating StringDocument4 pagesB15 Vibrating Stringconc oxygenNo ratings yet
- Iitians Iit Jee Physics Test: Code - Ap209Document12 pagesIitians Iit Jee Physics Test: Code - Ap209Samarth TikarNo ratings yet
- PE-209 Lecture-01Document34 pagesPE-209 Lecture-01Adeem AbbasNo ratings yet