You might also like
- MF MF MF MF 124 124 124 124 BALER Baler Baler Baler - 1637031 1637031 1637031 1637031Document119 pagesMF MF MF MF 124 124 124 124 BALER Baler Baler Baler - 1637031 1637031 1637031 1637031Gradimir Milanovic100% (2)
- Internal Attachment Technical Report 2021-1Document22 pagesInternal Attachment Technical Report 2021-1Josline Muriiki100% (1)
- Miami Dade College2012 2014 Catalog Tcm6-81161Document292 pagesMiami Dade College2012 2014 Catalog Tcm6-81161brooklynsnowNo ratings yet
- Distributed Energy Resources in Local Integrated Energy Systems: Optimal Operation and PlanningFrom EverandDistributed Energy Resources in Local Integrated Energy Systems: Optimal Operation and PlanningGiorgio GraditiNo ratings yet
- Handwheel To Road Wheel 730039V001Document79 pagesHandwheel To Road Wheel 730039V001Dinesh Maheshwari100% (1)
- Working Machine CatalogueDocument19 pagesWorking Machine CatalogueEvgeniy Kolomiyets100% (1)
- OmsiPFT PC4-3000Document2 pagesOmsiPFT PC4-3000Rio de MarioNo ratings yet
- Regenerative Suspension SystemDocument24 pagesRegenerative Suspension Systemvineeth100% (1)
- AC Induction Motor MonitoringDocument4 pagesAC Induction Motor MonitoringAnonymous PVXBGg9TNo ratings yet
- GSM Based Energy Meter With Load ControlDocument6 pagesGSM Based Energy Meter With Load ControlMurtaza RangwalaNo ratings yet
- Hybrid Renewable Energy System For Island Electrification: Final Year Project 1 PresentationDocument13 pagesHybrid Renewable Energy System For Island Electrification: Final Year Project 1 PresentationAwlia KhanNo ratings yet
- Parameter Estimation of Three Phase Induction Motor An Innovative Approach Thesis PDFDocument58 pagesParameter Estimation of Three Phase Induction Motor An Innovative Approach Thesis PDFAmit BhargavaNo ratings yet
- AC Induction Motor Control Using Constant V-F Principle and SVPWM With DSP TMS 320C240Document131 pagesAC Induction Motor Control Using Constant V-F Principle and SVPWM With DSP TMS 320C240hoangductuanNo ratings yet
- Electromagnetic Engine 1Document18 pagesElectromagnetic Engine 1vikasNo ratings yet
- Excel First Review and Training Center, Inc.: Cebu: Davao: Manila: BaguioDocument4 pagesExcel First Review and Training Center, Inc.: Cebu: Davao: Manila: BaguioCelina RoxasNo ratings yet
- Synchronizing PDFDocument14 pagesSynchronizing PDFSarath SasidharanNo ratings yet
- Omni-Tomography / Multi-TomographyDocument43 pagesOmni-Tomography / Multi-Tomographyantonio ScacchiNo ratings yet
- Energy Harvesting From Regenerative Shock Absorbers Seminar ReportDocument28 pagesEnergy Harvesting From Regenerative Shock Absorbers Seminar ReportBoby ThomasNo ratings yet
- 2016 Effect of Solidity On Aerodynamic Forces Around Straight-Bladed Vertical Axis Wind Turbine by Wind Tunnel ExperimentsDocument12 pages2016 Effect of Solidity On Aerodynamic Forces Around Straight-Bladed Vertical Axis Wind Turbine by Wind Tunnel ExperimentsDiego Carhuaz VasquezNo ratings yet
- Nuclear Power PlantDocument13 pagesNuclear Power PlantRiya KishoreNo ratings yet
- (NEW) Automation of Electricity Billing Process IEEE 2014Document5 pages(NEW) Automation of Electricity Billing Process IEEE 2014HarshalNo ratings yet
- Isolation and Protection of The Motor-Generator Pair System For Fault Ride-Through of Renewable Energy Generation SystemsDocument20 pagesIsolation and Protection of The Motor-Generator Pair System For Fault Ride-Through of Renewable Energy Generation SystemsUmesh GowdaNo ratings yet
- Module Information Module Title Electric Drives and Control Module Code MMD2511Document4 pagesModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaNo ratings yet
- 2-Stability and Reliability Improvement in Solar Wind Hybrid Power System With Battery Energy Storage StationDocument9 pages2-Stability and Reliability Improvement in Solar Wind Hybrid Power System With Battery Energy Storage StationEngrImranKhanNo ratings yet
- Plug-In Hybrid Electric Vehicles As A Source of Distributed Frequency RegulationDocument154 pagesPlug-In Hybrid Electric Vehicles As A Source of Distributed Frequency RegulationRajasekhar ReddyNo ratings yet
- 360 Degree Load CarrierDocument28 pages360 Degree Load CarrierTanviNo ratings yet
- BY Pratik Kumar Singh Roll No. 16529Document18 pagesBY Pratik Kumar Singh Roll No. 16529Yogesh AnandNo ratings yet
- Seminar Report On "Anti-Lock Braking System": Dr. Sau. Kamaltai Gawai Institute of Engineering and TechnologyDocument20 pagesSeminar Report On "Anti-Lock Braking System": Dr. Sau. Kamaltai Gawai Institute of Engineering and TechnologyViraj KhadseNo ratings yet
- Design of A Real Time Smart Honking SystemDocument6 pagesDesign of A Real Time Smart Honking SystemArka MajumdarNo ratings yet
- An Improved iUPQC Controller To Provide Additional Grid-Voltage Regulation As A STATCOM PDFDocument8 pagesAn Improved iUPQC Controller To Provide Additional Grid-Voltage Regulation As A STATCOM PDFChristian Emenike100% (1)
- Mebre ProposalDocument12 pagesMebre Proposalmere mezgebeNo ratings yet
- Spec Info Mechanical Data Cooling Data Motor Starting Curve Open Circuit Curve Zero Power Factor Curve Reactive Capability Chart General InformationDocument11 pagesSpec Info Mechanical Data Cooling Data Motor Starting Curve Open Circuit Curve Zero Power Factor Curve Reactive Capability Chart General Informationrupesh1000No ratings yet
- Auto Synchronizing 6200 SeriesDocument2 pagesAuto Synchronizing 6200 SeriesJawid YousofNo ratings yet
- FEM Notes 2016 PDFDocument71 pagesFEM Notes 2016 PDFjamesNo ratings yet
- Electrical Machine Lab ManualDocument84 pagesElectrical Machine Lab ManualUtkarsh RajNo ratings yet
- Directional IndicatorsDocument8 pagesDirectional IndicatorsAuto VeteranNo ratings yet
- Design Example Solution With Statement of ProblemDocument3 pagesDesign Example Solution With Statement of ProblemSherafghan IftikharNo ratings yet
- Sonu 1Document19 pagesSonu 1Sonu SinghNo ratings yet
- A Review On Hybrid System For Power GenerationDocument5 pagesA Review On Hybrid System For Power GenerationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Particle Swarm Optimization Based Reactive Power Dispatch For PowDocument98 pagesParticle Swarm Optimization Based Reactive Power Dispatch For Powwjdan alzwi100% (1)
- Power Engineering Guide: Transmission and DistributionDocument12 pagesPower Engineering Guide: Transmission and DistributionFarhan ShahNo ratings yet
- Thesis WTDocument94 pagesThesis WTSyed Wajahat AliNo ratings yet
- Voltage Regulator AutoTuningDocument12 pagesVoltage Regulator AutoTuningНиколай МухаNo ratings yet
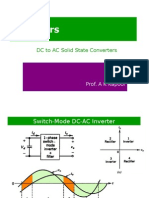
- InvertersDocument35 pagesInvertersyashtNo ratings yet
- Simulación de 21 y 87L Con SimulinkDocument72 pagesSimulación de 21 y 87L Con SimulinkLuis BriceñoNo ratings yet
- Electromagnetic Breaking SystemDocument27 pagesElectromagnetic Breaking SystemRaj KamalNo ratings yet
- Charging System Leture and Quiz1Document5 pagesCharging System Leture and Quiz1Mae CherryNo ratings yet
- Seminar ReportDocument24 pagesSeminar ReportPriyanka Shirsat100% (1)
- Design and Analysis of Four Wheel Drive Electric VehicleDocument7 pagesDesign and Analysis of Four Wheel Drive Electric VehicleIJRASETPublicationsNo ratings yet
- Design of Intelligent Braking SystemDocument6 pagesDesign of Intelligent Braking SystemViknesh Angai50% (2)
- Microcontroller Based Protection and Control of Three-Phase Induction Motor PDFDocument6 pagesMicrocontroller Based Protection and Control of Three-Phase Induction Motor PDFEditor IJRITCC100% (1)
- TP Study On DC Motor by Using H InfinityDocument5 pagesTP Study On DC Motor by Using H InfinityAhmed HummerNo ratings yet
- Ac Motors: (A) Synchronous Motors. (B) Asynchronous MotorsDocument18 pagesAc Motors: (A) Synchronous Motors. (B) Asynchronous MotorsStudy portalNo ratings yet
- Simulation of Electric Machine and Drive Systems Using Matlab and SimulinkDocument17 pagesSimulation of Electric Machine and Drive Systems Using Matlab and SimulinkSamuel Alves de SouzaNo ratings yet
- Brake by Wiire PDFDocument8 pagesBrake by Wiire PDFWagner CondorNo ratings yet
- Simulation of Five-Level Five-Phase SVPWM Voltage Source Inverter PDFDocument5 pagesSimulation of Five-Level Five-Phase SVPWM Voltage Source Inverter PDFBook4AllNo ratings yet
- A STATCOM-Control Scheme For Grid Connected Wind Energy System For Power Quality ImprovementDocument15 pagesA STATCOM-Control Scheme For Grid Connected Wind Energy System For Power Quality Improvementk rajendraNo ratings yet
- Photon Counting Detectors Concept Technical Challe - 2022 - European Journal oDocument6 pagesPhoton Counting Detectors Concept Technical Challe - 2022 - European Journal oWang YuNo ratings yet
- Renewable Energy Final PaperDocument52 pagesRenewable Energy Final PaperMashaal FNo ratings yet
- V S DDocument17 pagesV S DveguruprasadNo ratings yet
- Claxton LSCMIntroDocument37 pagesClaxton LSCMIntroBilge Can YıldızNo ratings yet
- Gearbox PDFDocument51 pagesGearbox PDFmraidi100% (1)
- Mechanical Engineering Department: PPT On Automobile EngineeringDocument147 pagesMechanical Engineering Department: PPT On Automobile EngineeringMuhammad Hamza TahirNo ratings yet
- Vibration Issues of Diesel EngineDocument24 pagesVibration Issues of Diesel EngineBasil OguakaNo ratings yet
- Dynapac - PL500TDocument370 pagesDynapac - PL500TFRNo ratings yet
- MAN Marine Diesel Engines For Commercial Shipping - Installation InstructionsDocument100 pagesMAN Marine Diesel Engines For Commercial Shipping - Installation InstructionsMohsen Moghadam50% (2)
- Abreham Debris Couplinig DesignDocument22 pagesAbreham Debris Couplinig DesignAbreham DebrisNo ratings yet
- Experiment 8 Hook's Coupling ObjectiveDocument4 pagesExperiment 8 Hook's Coupling ObjectiveNadeem AhmedNo ratings yet
- Catalogo Gennie z30.20hdDocument120 pagesCatalogo Gennie z30.20hdJOSÉ FERNANDONo ratings yet
- Experimentation & Instrumentation MECH 212: Experiment 5: Universal CouplingDocument16 pagesExperimentation & Instrumentation MECH 212: Experiment 5: Universal CouplingTanya DeebNo ratings yet
- Motion Analysis Volleyball Spike PDFDocument13 pagesMotion Analysis Volleyball Spike PDFNur IzzatiNo ratings yet
- Foundations of Engineering MechanicsDocument858 pagesFoundations of Engineering MechanicsMiloradMenjicNo ratings yet
- Unit Iv SmeDocument118 pagesUnit Iv SmeSuprithNo ratings yet
- Machinery Guide Vertical - RfuDocument289 pagesMachinery Guide Vertical - Rfui1976No ratings yet
- 1400SRM0046 (06 2017) Uk en PDFDocument46 pages1400SRM0046 (06 2017) Uk en PDFCosmin GîrleanuNo ratings yet
- Servicing Differential & Front AxleDocument38 pagesServicing Differential & Front AxleAlex J RoblesNo ratings yet
- Land Rover Discovery II - Front Prop Shaft RebuildDocument19 pagesLand Rover Discovery II - Front Prop Shaft Rebuildrv_harpNo ratings yet
- Total AutoDocument49 pagesTotal Automoba funnyNo ratings yet
- Nation Parts Guide PG 29Document1 pageNation Parts Guide PG 29ramsi17No ratings yet
- Group 9: Propeller ShaftDocument2 pagesGroup 9: Propeller Shaftdodge34No ratings yet
- 250cc LT-F250 AJ50A 1999-2002) Suzuki ATV Parts ListDocument69 pages250cc LT-F250 AJ50A 1999-2002) Suzuki ATV Parts ListMarkNo ratings yet
- Kom Lecture NotesDocument134 pagesKom Lecture Noteslakshmigsr6610No ratings yet
- Chapter 07 - Universal JointsDocument18 pagesChapter 07 - Universal Jointsnigatudesta21No ratings yet
- 1999-01-0072 MADYMO Frame ModelDocument9 pages1999-01-0072 MADYMO Frame ModelsayedNo ratings yet
- Drive Axle Shafts and CV JointsDocument9 pagesDrive Axle Shafts and CV JointsabasNo ratings yet
- Cardan Spicer Gep - 2 PDFDocument38 pagesCardan Spicer Gep - 2 PDFCamilo Sanchez VanegasNo ratings yet
- Design Calculation of Propeller Shaft (Landcruiser) : Abstract - The Power Transmission System Is The GreatestDocument5 pagesDesign Calculation of Propeller Shaft (Landcruiser) : Abstract - The Power Transmission System Is The GreatestDr. Aung Ko Latt100% (1)
- Selection and Performance: Criteria For Power Transmission CouplingsDocument10 pagesSelection and Performance: Criteria For Power Transmission Couplingsamir moniriNo ratings yet