You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Ipv6 Configuration Guide, Cisco Ios Release 15.2M&T: Americas HeadquartersDocument202 pagesIpv6 Configuration Guide, Cisco Ios Release 15.2M&T: Americas HeadquartersLALU FAESALNo ratings yet
- Aws Architecture GuideDocument76 pagesAws Architecture GuideNapster King100% (2)
- DMVPN Phase 3 MirgationDocument16 pagesDMVPN Phase 3 MirgationTech GossipNo ratings yet
- New RTA1025W SpecSheet PDFDocument3 pagesNew RTA1025W SpecSheet PDFssdebNo ratings yet
- 156-315.80 Exam - Questions Answer Discussion From Exam TopicsDocument200 pages156-315.80 Exam - Questions Answer Discussion From Exam TopicsAonymousNo ratings yet
- Cisco Viptela System Properties - IP With EaseDocument2 pagesCisco Viptela System Properties - IP With EasemvsnkraoNo ratings yet
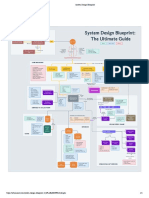
- System Design BlueprintDocument1 pageSystem Design BlueprintSathiamoorthy DuraisamyNo ratings yet
- Digi Quick Connect CardDocument2 pagesDigi Quick Connect CardAnonymous 1OlQQ3cWNo ratings yet
- ATOSNTUserManual 6.1.12Document603 pagesATOSNTUserManual 6.1.12alessandroNo ratings yet
- Manual Sitecom 300N Wireless RouterDocument59 pagesManual Sitecom 300N Wireless RouterVíctor Daniel Parra MateoNo ratings yet
- Bulletcat12: Bulletcat12 - Lte Advanced Carrier Aggregation 600 Mbps Cat12 GatewayDocument2 pagesBulletcat12: Bulletcat12 - Lte Advanced Carrier Aggregation 600 Mbps Cat12 GatewayJo AnorienNo ratings yet
- DCN Over VlanDocument14 pagesDCN Over VlanHedi PrimaNo ratings yet
- Practical - 15: Segmentation and Reassembly (SAR) Is The Process Used To Fragment and ReassembleDocument4 pagesPractical - 15: Segmentation and Reassembly (SAR) Is The Process Used To Fragment and Reassemblemusic MasterNo ratings yet
- Ethernet Csma Mac Opnet Lab SolutionDocument7 pagesEthernet Csma Mac Opnet Lab SolutionWerkneh EsheteNo ratings yet
- Fencing in A Red Hat High Availability ClusterDocument8 pagesFencing in A Red Hat High Availability Clusteraeldeeb7No ratings yet
- ISCOM - HT803G-WS2 (N) - Configuration - Guide - (Web) - (Rel - 01)Document132 pagesISCOM - HT803G-WS2 (N) - Configuration - Guide - (Web) - (Rel - 01)Никита ВасильчукNo ratings yet
- C9300-24T-A Datasheet: Quick SpecDocument5 pagesC9300-24T-A Datasheet: Quick SpecAmir TufailNo ratings yet
- BGRDR SF CRSW 01Document319 pagesBGRDR SF CRSW 01Ali AlaydrusNo ratings yet
- Promise SmartStor Family On Chart - ENDocument6 pagesPromise SmartStor Family On Chart - ENregexterminatorNo ratings yet
- SYS06 - 016-Traffic Scenario 7Document45 pagesSYS06 - 016-Traffic Scenario 7rob challerayNo ratings yet
- SE5001 Serial Device Server: User's ManualDocument97 pagesSE5001 Serial Device Server: User's ManualandreazuvNo ratings yet
- FortiSwitch Secure Access SeriesDocument19 pagesFortiSwitch Secure Access SeriesmagnusfischerNo ratings yet
- 7.1.2.4 Packet Tracer - Configuring VPNs (Optional) InstructionsDocument6 pages7.1.2.4 Packet Tracer - Configuring VPNs (Optional) InstructionsParitosh KumarNo ratings yet
- Chapter 2 v8.1Document114 pagesChapter 2 v8.1Thanh KhiếtNo ratings yet
- ملخص تطور جملة كیمیائیة نحو حالة التوازن PDFDocument1,300 pagesملخص تطور جملة كیمیائیة نحو حالة التوازن PDFHafsa WidedNo ratings yet
- Cisco IOS Master Command List, All Releases PDFDocument580 pagesCisco IOS Master Command List, All Releases PDFAmruthVarmaNo ratings yet
- MDM3310 Satellite Modem: MarketsDocument2 pagesMDM3310 Satellite Modem: Marketsq1w2e3r4t5r4e3w2No ratings yet
- IoT Solution Developer Protocols GuideDocument16 pagesIoT Solution Developer Protocols GuideUPENDRA KUMARNo ratings yet
- Network EngineerDocument10 pagesNetwork EngineerMohamed AbdalkreemNo ratings yet
- SSH Cheat SheetDocument1 pageSSH Cheat SheetJeevan Mallik SNo ratings yet