Professional Documents
Culture Documents
Control Theories For Load Compensation (Lectures 29-40) : Fig. 4.1 A Three Phase System
Uploaded by
Nand Kishor MeenaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Control Theories For Load Compensation (Lectures 29-40) : Fig. 4.1 A Three Phase System
Uploaded by
Nand Kishor MeenaCopyright:
Available Formats
Chapter 4
CONTROL THEORIES FOR LOAD
COMPENSATION
(Lectures 29-40)
4.1 Introduction
In the previous chapter, we studied the methods of load compensation. These methods can elimi-
nate only the fundamental reactive power and unbalance in the steady state. These kinds of com-
pensators can be realized using passive LC lters and thyristor controlled devices. However, when
harmonics are present in the system, these methods fails to provide correct compensation. To cor-
rect load with unbalance and harmonics, instantaneous load compensation methods are used. The
two important theories in this context are Instantaneous Theory of load compensation often known
as pq theory [1] and Instantaneous Symmetrical Component Theory for load compensation [2].
These theories will be discussed in this chapter. Their merits and demerits and applications will be
explored in detail.
To begin with pq theory, we shall rst recall the 0 transformation, which was discussed in
Chapter 2. For three-phase system shown in Fig. 4.1, the 0 transformations for voltages and
currents are given below.
a
b
c
n
a
b
c
Fig. 4.1 A three phase system
119
_
_
v
0
v
_
_
=
_
2
3
_
_
1
2
1
2
1
2
1
1
2
1
2
0
3
2
3
2
_
_
_
_
v
a
v
b
v
c
_
_
(4.1)
_
_
i
0
i
_
_
=
_
2
3
_
_
1
2
1
2
1
2
1
1
2
1
2
0
3
2
3
2
_
_
_
_
i
a
i
b
i
c
_
_
(4.2)
The instantaneous active, p(t) and reactive, q(t) powers were dened in Chapter 2 through equa-
tions (2.14)-(2.15) respectively. For the sake of completeness these are given below.
p
3
(t) = v
a
i
a
+ v
b
i
b
+ v
c
i
c
= v
+ v
+ v
0
i
0
= p
+ p
+ p
0
= p
+ p
0
(4.3)
Where, p
= p
+ p
= v
+ v
and p
0
= v
0
i
0
.
In the instantaneous reactive power theory, as discussed in Chapter 2, the instantaneous reactive
power, q(t) was dened as,
q(t) = q
= v
+ v
= v
=
1
3
[v
bc
i
a
+ v
ca
i
b
+ v
ab
i
c
] (4.4)
Therefore, powers p
o
, p
and q
can be expressed in matrix form as given below.
_
_
p
0
p
_
_
=
_
_
v
0
0 0
0 v
0 v
_
_
_
_
i
0
i
_
_
(4.5)
From the above equation, the currents, i
0
, i
and i
are computed as given below.
_
_
i
0
i
_
_
=
_
_
v
0
0 0
0 v
0 v
_
_
1
_
_
p
0
p
_
_
=
1
v
0
(v
2
+ v
2
)
_
_
v
2
+ v
2
0 0
0 v
0
v
v
0
v
0 v
0
v
v
0
v
_
_
_
_
p
0
p
_
_
(4.6)
In the above equation,
i
0
=
p
0
(v
2
+ v
2
)
v
0
(v
2
+ v
2
)
=
p
0
v
0
=
v
0
i
0
v
0
= i
0
(4.7)
i
=
v
v
2
+ v
2
+
v
2
+ v
2
(q
)
= i
p
+ i
q
(4.8)
120
i
=
v
v
2
+ v
2
+
v
2
+ v
2
q
= i
p
+ i
q
(4.9)
where
i
0
= zero sequence instantaneous current
i
p
= -phase instantaneous active current =
v
v
2
+v
2
p
i
p
= -phase instantaneous active current =
v
v
2
+v
2
p
i
q
= -phase instantaneous reactive current =
v
v
2
+v
2
q
i
q
= -phase instantaneous reactive current =
v
v
2
+v
2
q
Using above denitions of various components of currents, the three phase instantaneous power
can be expressed as,
p
3
= v
0
i
0
+ v
+ v
= v
0
i
0
+ v
(i
p
+ i
q
) + v
(i
p
+ i
q
)
= v
0
i
0
+ v
_
v
v
2
+ v
2
+
v
v
2
+ v
2
_
+ v
_
v
v
2
+ v
2
+
v
v
2
+ v
2
_
= v
0
i
0
+ v
i
p
+ v
i
q
+ v
i
p
+ v
i
q
= v
0
i
0
+ (p
p
+ p
q
) + (p
p
+ p
q
)
= v
0
i
0
+ (p
p
+ p
p
) (4.10)
In the above equation,
p
q
+ p
q
= v
i
q
+ v
i
q
= 0 (4.11)
If referred to compensator (or lter), the equation (4.6) can be written as,
_
_
i
f0
i
f
i
f
_
_
=
1
v
0
(v
2
+ v
2
)
_
_
v
2
+ v
2
0 0
0 v
0
v
v
0
v
0 v
0
v
v
0
v
_
_
_
_
p
f0
p
f
q
f
_
_
(4.12)
Since the compensator does not supply any instantaneous real power, therefore,
p
f3
= p
f0
+ p
f
= 0 (4.13)
The instantaneous zero sequence power exchanges between the load and the compensator and
compensator reactive power must be equal to load reactive power. Therefore we have,
p
fo
= p
lo
= v
o
i
lo
(4.14)
p
f
= p
lo
= v
o
i
lo
(4.15)
q
f
= q
l
= v
i
l
v
i
l
(4.16)
121
Since over all real power from the compensator is equal to zero, therefore the following should be
satised.
p
fo
+ p
f
= 0 (4.17)
The power ow description is shown in Fig. 4.2.
l lo
p p
C
lo
p
o
l
p
P
l
q
Fig. 4.2 Power ow description of three-phase 4-wire compensated system
Also the zero sequence current should be circulated through the compensator, therefore,
i
fo
= i
lo
(4.18)
Using the conditions of compensator powers as given in the above, the and components of
compensator currents can be given as following.
i
f
=
v
v
2
+ v
2
p
f
+
v
v
2
+ v
2
q
f
=
1
v
2
+ v
2
[v
(v
o
i
lo
) v
(v
i
l
v
i
l
)]
=
1
v
2
+ v
2
[v
v
o
i
lo
v
i
l
+ v
2
i
l
)] (4.19)
Similarly,
i
f
=
1
v
2
+ v
2
[v
( p
f
) + v
( q
f
)]
=
1
v
2
+ v
2
[v
(v
o
i
lo
) + v
(v
i
l
v
i
l
)]
=
1
v
2
+ v
2
[v
o
v
i
lo
v
i
l
+ v
2
i
l
] (4.20)
122
The above equations are derived based on assumption that in general v
lo
= 0 If v
o
= 0 ,then
i
f0
= i
lo
i
f
=
1
v
2
+ v
2
[v
2
i
l
v
i
l
] (4.21)
i
f
=
1
v
2
+ v
2
[v
i
l
+ v
2
i
l
]
Once the compensator currents, i
fo
, i
f
and i
f
are known, they are transformed back to the abc
frame in order to implement in real time. This transformation is given below.
_
_
i
fa
i
fb
i
fc
_
_
=
_
2
3
_
_
1
2
1 0
1
2
1
2
3
2
1
2
1
2
3
2
_
_
_
_
i
fo
i
f
i
f
_
_
(4.22)
These reference currents are shown in Fig. 4.3. Once reference compensator currents are known,
these are tracked using voltage source inverter (VSI). The other details of the scheme can be as
following.
Thus, compensator powers can be expressed in terms of load powers as following.
sb
i
sc
i
sb
v
sc
v
lb
i
lc
i
LOAD
LOAD
LOAD
N
'
n
n
*
fc
i
*
fa
i
*
fb
i
sa
v
sa
i
la
i
Fig. 4.3 A three-phase four-wire compensated system with ideal compensator
p
fo
= p
lo
p
f
= (p
l
p
lavg
) p
lo
= p
l
p
f
= p
fo
+ p
f
= p
l
123
The power components and various components of currents are related as following.
_
p
_
=
_
v
_
=
_
v
(i
p
+ i
q
)
v
(i
p
+ i
q
)
_
=
_
v
i
p
v
i
p
_
+
_
v
i
q
v
i
q
_
=
_
p
p
p
p
_
+
_
p
q
p
q
_
(4.23)
The following quantities are dened.
- axis instantaneous active power = p
p
= v
i
p
- axis instantaneous reactive power = p
q
= v
i
q
- axis instantaneous active power = p
p
= v
i
p
- axis instantaneous reactive power = p
q
= v
i
q
It is seen that,
p
p
+ p
p
= v
i
p
+ v
i
p
=
(v
)(v
)
v
2
+ v
2
p +
(v
)(v
)
v
2
+ v
2
p = (
v
2
+ v
2
v
2
+ v
2
)p = p (4.24)
and
p
q
+ p
q
= v
i
q
+ v
i
q
=
(v
)(v
)
v
2 + v
2
p +
(v
)(v
)
v
2 + v
2
p = 0 (4.25)
Thus, it can be observed that the sum of p
p
and p
p
is equal to total instantaneous real power p(t)
and the sum of p
q
and p
q
is equal to zero. Therefore,
p
3
= p + p
o
= p
+ p
+ p
o
= p
p
+ p
p
+ p
o
(4.26)
For an ideal compensator,
p
fo
= p
lo
= v
o
i
lo
= p
o
p
f
= p
lo
(4.27)
q
f
= q
l
For practical compensator, the switching and ohmic losses should be considered. These losses
should be met from the source in order to maintain the dc link voltage constant. Let these losses
are denoted by P
loss
, then the following formulation is used to include this term. Let the average
124
power that must be supplied to the compensator be p, then p is given as following.
p = p
o
+ P
loss
(4.28)
Thus, the compensator powers can be expressed as,
p
f0
= p
l0
p
f
= p
l
p (4.29)
q
f
= q
l
Once these compensator powers are obtained, the compensator currents i
f0
, i
f
and i
f
are com-
puted using (4.18), (4.19) and (4.20). Knowing these currents, we can obtain compensator currents
in abc frame using equation (4.22). These currents are realized using voltage source inverter (VSI).
One of the common VSI topology is illustrated in Fig. 4.4. This VSI topology is known as neutral
clamped inverter.
3
S
5
S
a
c
dc1
C
fa
i
fb
i
fc
i
sa
i
sb
i
sc
i
sa
v
sb
v
sc
v
la
i
lb
i
lc
i
N
n
dc2
C
4
S
6
S
2
S
1
i
LOAD
LOAD
LOAD
1
S
2
i
b
f
R
n
f
L
f
R
f
L
PCC
dc2
V
dc1
V o
i
Fig. 4.4 Voltage Source Inverter
While realizing compensator using voltage source inverter, there are switching and other losses
in the inverter circuit. Therefore, a fraction of total power is required to maintain dc capacitor
voltage to a reference value by generating P
loss
term. Once reference lter currents (i
f0
, i
f
, i
f
)
are obtained, the lter currents in abc system are obtained as below.
_
_
i
fa
i
fb
i
fc
_
_
=
_
2
3
_
_
1
2
1 0
1
2
1
2
3
2
1
2
1
2
3
2
_
_
_
_
i
fo
i
f
i
f
_
_
As discussed above, the compensator powers are substituted in equation (4.29), the compensator
currents are expressed as below.
125
_
_
i
fo
i
f
i
f
_
_
=
1
v
0
(v
2
+ v
2
)
_
_
v
2
+ v
2
0 0
0 v
o
v
v
0
v
0 v
0
v
v
0
v
_
_
_
_
p
lo
p
l
+ p
0
p
loss
q
l
_
_
_
_
i
fo
i
f
i
f
_
_
=
1
v
0
(v
2
+ v
2
)
_
_
v
2
+ v
2
0 0
0 v
o
v
v
0
v
0 v
0
v
v
0
v
_
_
_
_
p
lo
p
l
+ p
0
p
loss
q
l
_
_
Now once we know i
fa
, i
fb
, i
fc
signals, these have to be synthesized using voltage source
inverter. A typical voltage source inverter (VSI) along with a three-phase compensated system as
shown in Fig. 4.5.
Voltage regulator
Active filter
controller
la
i
lb
i
lc
i
sa
v
sb
v
sc
v
fa
i
fc
i
loss
P
Voltage source
inverter
Dymanic
hysteresis current
control
fa
i
fc
i
dc
V
dc ref
V
L
O
A
D
Source
sa
i
la
i
fa
i
fc
i
sc
i
sb
i sa
v
sb
v
0
sn
i
n l
i
sc
v
6
S
1
S
Fig. 4.5 Control algorithm for three-phase compensated system
4.1.1 State Space Modeling of the Compensator
There are different VSI topologies to realize [3]. The most commonly used is neutral clamped
inverter topology as shown in Fig. 4.4. Since this is a three phase four-wire system each phase can
be considered independently. Therefore, to analyze above circuit, only one phase is considered,
which is shown in Fig. 4.6. The other phases work similarly. In Fig. 4.6(a), for switch S
1
is closed
and switch S
4
is open, the KVL can be written as below.
L
f
di
fa
dt
+ R
f
i
fa
+ v
sa
V
dc1
= 0 (4.30)
From the above equation,
di
fa
dt
=
R
f
L
f
i
fa
v
sa
L
f
+
V
dc1
L
f
(4.31)
126
2 dc
C
1 dc
C
f
R
f
L
sa
v
fa
i
-
+
dc1
V
-
+
dc2
V
2 dc
C
1 dc
C
4
(ON) S
f
R
f
L
sa
v
fa
i
-
+
dc1
V
-
+
dc2
V
1
(OFF) S
1
(ON) S
4
(OFF) S
(a)
(b)
Fig. 4.6 Equivalent circuit (a) S
1
(ON), S
4
(OFF) (b) S
1
(OFF), S
4
(ON)
Similarly, when S
1
is open and S
4
is closed as shown in Fig. 4.6 (b),
di
fa
dt
=
R
f
L
f
i
fa
v
sa
L
f
V
dc2
L
f
. (4.32)
The above two equations can be combined into one by using switching signals S
a
, S
a
, as given
below.
di
fa
dt
=
R
f
L
f
i
fa
+ S
a
V
dc1
L
f
S
a
V
dc2
L
f
v
sa
L
f
(4.33)
Similarly, for phases b and c, the rst order derivative of lter currents can be written as following.
di
fb
dt
=
R
f
L
f
i
fb
+ S
b
V
dc1
L
f
S
b
V
dc2
L
f
v
sb
L
f
(4.34)
di
fc
dt
=
R
f
L
f
i
fc
+ S
c
V
dc1
L
f
S
c
V
dc2
L
f
v
sc
L
f
(4.35)
where, S
a
= 0 and S
a
= 1 implies that the top switch is open and bottom switch is closed and,
S
a
= 1 and S
a
= 0 implies that the top switch is closed and bottom switch is open. The two logic
signals S
a
and S
a
are complementary to each other. This logic also holds for the other two phases.
The inverter currents i
1
and i
2
as shown in Fig. 4.4, can be expressed in terms of lter currents
and switching signals. These are given below.
i
1
= S
a
i
fa
+ S
b
i
fb
+ S
c
i
fc
i
2
= S
a
i
fa
+ S
b
i
fb
+ S
c
i
fc
(4.36)
The relationship between DC capacitor voltages V
dc1
, V
dc2
and inverter currents i
1
and i
2
is given
as below.
C
dc1
dV
dc1
dt
= i
1
C
dc2
dV
dc2
dt
= i
2
(4.37)
127
Considering C
dc1
= C
dc2
= C
dc
and substituting i
1
and i
2
from (4.36), the above equations can be
written as,
dV
dc1
dt
=
S
a
C
dc
i
fa
S
b
C
dc
i
fb
S
c
C
dc
i
fc
(4.38)
dV
dc2
dt
=
S
a
C
dc
i
fa
+
S
b
C
dc
i
fb
+
S
c
C
dc
i
fc
(4.39)
The equations (4.33), (4.34), (4.35), (4.38) and (4.39) can be represented in state space form as
given below.
d
dt
_
_
i
fa
i
fb
i
fc
V
dc1
V
dc2
_
_
=
_
R
f
L
f
0 0
Sa
L
f
Sa
L
f
0
R
f
L
f
0
S
b
L
f
S
b
L
f
0 0
R
f
L
f
Sc
L
f
Sc
L
f
Sa
C
S
b
C
Sc
C
0 0
Sa
C
S
b
C
Sc
C
0 0
_
_
_
_
i
fa
i
fb
i
fc
V
dc1
V
dc2
_
_
+
_
1
L
f
0 0
0
1
L
f
0
0 0
1
L
f
0 0 0
0 0 0
_
_
_
_
v
sa
v
sb
v
sc
_
_
(4.40)
The above equation is in the form,
x = Ax + Bu. (4.41)
Where, x is a state vector, A is system matrix, B is input matrix and u is input vector. This state
space equation can be solved using MATLAB to implement the compensator for simulation study.
4.1.2 Switching Control of the VSI
In the equation (4.40), the switching signals S
a
, S
a
, S
b
, S
b
, S
c
, and S
c
are generated using a hys-
teresis band current control. This is described as following. The upper and lower bands of the
reference lter current (say phase-a) are formed using hysteresis h i.e., i
fa
+h and i
fa
h. Then,
following logic is used to generate switching signals.
If i
fa
(i
fa
+ h)
S
a
= 0 and S
a
= 1
else if i
fa
(i
fa
h)
S
a
= 1 and S
a
= 0
else if (i
fa
h) < i
fa
< (i
fa
+ h)
Retain the current status of the switches.
end
The rst order derivative of state variables can be easily solved using c2d (continuous to dis-
crete) command in MATLAB. It is given below.
[A
d
B
d
] = c2d(A, B, t
d
) (4.42)
128
The value of the state vector is updated using the following equation.
x[(k + 1)T] = A
d
x[kT] + B
d
u[kT] (4.43)
Where x(k + 1) refers the value of the state vector at (k + 1)
th
sample. The A
d
and B
d
computed
by c2d
function as described above can be expressed as below.
The solution of state equation given by (4.41) is given as following [Nagrath].
x(t) = e
A(tt
0
)
x(t
0
) +
t
_
to
e
A(t)
Bu()d (4.44)
Where t
o
represents initial time and t represents nal time. The above equation can be re-written
as following.
x(t) = (t t
o
) x(t
o
) +
t
_
to
(t ) Bu() d (4.45)
Writing above equation for small time interval, kT t (k+1)T with t
o
= kT and t = (k+1)T,
x[(k + 1)T] = e
AT
x[kT] +
(k+1)T
_
kT
e
A{(k+1)T}
Bu[kT] d
= e
AT
x[kT] +
(k+1)T
_
kT
_
e
A{(k+1)T}
Bd
_
u[kT] (4.46)
Comparing (4.43) and (4.46), the discrete matrices A
d
and B
d
computed by c2d
MATLAB func-
tion can be written as following.
A
d
= e
AT
B
d
=
(k+1)T
_
kT
e
A{(k+1)T}
Bd (4.47)
4.1.3 Generation of P
loss
to maintain dc capacitor voltage
The next step is to determine P
loss
in order to maintain the dc link voltage close to its reference
value. In compensation, what could be an indication of P
loss
to account losses in the inverter. The
average voltage variation of dc link may be an indicator of P
loss
in the inverter. If losses are more
than supplied by the inverter, the dc link voltage, i.e., V
dc
= V
dc1
+ V
dc2
, will decline towards zero
and vice versa. For proper operation of compensator, we need to maintain dc capacitor voltage
to two times of the reference value of each capacitor voltage i.e., V
dc1
+ V
dc2
= V
dc
= 2 V
dcref
.
Thus, we have to replenish losses in inverter and sustain dc capacitor voltage to 2V
dcref
with each
129
capacitor voltage to V
dcref
. This is achieved with the help of proportional integral (PI) controller
described below [4]. Lets dene an error signal as following.
e
V dc
= 2 V
dcref
(V
dc1
+ V
dc2
) = 2 V
dcref
V
dc
Then, the term P
loss
is computed as following.
P
loss
= K
p
e
V dc
+ K
i
_
T
d
0
e
V dc
dt
This control loop need not be very fast and may be updated once in a voltage cycle, preferably at
the positive of phase-a voltage and generate P
loss
term at these points. The above controller can be
implemented using digital domain as following.
P
loss
(k) = K
p
e
V
dc
(k) + K
i
k
j=0
e
V
dc
(j) T
d
. (4.48)
In the above equation, k represents the k
th
sample of error, e
V
dc
. For k = 1, the above equation can
be written as,
P
loss
(1) = K
p
e
V
dc
(1) + K
i
1
j=0
e
V
dc
(j) T
d
.
= K
p
e
V
dc
(1) + K
i
[e
V
dc
(0) + e
V
dc
(1)] T
d
. (4.49)
Similarly for k = 2, we can write,
P
loss
(2) = K
p
e
V
dc
(1) + K
i
[e
V
dc
(0) + e
V
dc
(1) + e
V
dc
(2)] T
d
. (4.50)
Replacing K
i
[e
V
dc
(0) + e
V
dc
(1)] from (4.49), we get,
K
i
[e
V
dc
(0) + e
V
dc
(1)] T
d
= P
loss
(1) K
p
e
V
dc
(1) (4.51)
Substituting above value in (4.50),we obtain the following.
P
loss
(2) = K
p
e
V
dc
(2) + P
loss
(1) K
p
e
V
dc
(1) + K
i
e
V
dc
(2) T
d
= P
loss
(1) + K
p
[e
V
dc
(2) e
V
dc
(1)] + K
i
e
V
dc
(2) T
d
(4.52)
In general, for k
th
sample of P
loss
,
P
loss
(k) = P
loss
(k 1) + K
p
[e
V
dc
(k) e
V
dc
(k 1)] + K
i
e
V
dc
(k) T
d
. (4.53)
The algorithm can be used to implement PI controler to generate P
loss
. The control action can be
updated at every positive zero crossing of phase-a voltage for example.
4.1.4 Computation of load average power (P
lavg
)
In reference current expressions, the average load power (P
lavg
) is required to be computed. Al-
though low pass lter can be used to nd this, however the dynamic response is quite slow. The
130
dynamic performance of computation of P
lavg
plays signicant role in compensation. For this
reason, a moving average algorithm can be used, which is described below.
p
l
= P
lavg
= v
a
i
la
+ v
b
i
lb
+ v
c
i
lc
=
1
T
_
T
0
(v
a
i
la
+ v
b
i
lb
+ v
c
i
lc
) dt (4.54)
The above equation can be written with integration from t
1
to t
1
+ T as given in the following.
P
lavg
=
1
T
_
t1+T
t1
(v
a
i
la
+ v
b
i
lb
+ v
c
i
lc
) dt (4.55)
This is known as moving average lter (MAF). Any change in variables instantly reected with
settling time of one cycle.
4.2 Some Misconception in Reactive Power Theory
The instantaneous reactive power theory, that has evolved from Fortesque, Park and Clarke Trans-
formations of voltage and current specied in phases-a, b and c coordinates [5]. In general, for
3-phase, 4-wire system,
_
_
v
o
v
_
_
=
_
2
3
_
_
1
2
1
2
1
2
1
1
2
1
2
0
3
2
3
2
_
_
_
_
v
a
v
b
v
c
_
_
(4.56)
Similarly, for currents, the 0 components are given as following.
_
_
i
o
i
_
_
=
_
2
3
_
_
1
2
1
2
1
2
1
1
2
1
2
0
3
2
3
2
_
_
_
_
i
a
i
b
i
c
_
_
(4.57)
For balanced systemv
0
= (v
a
+v
b
+v
c
)/
3 = 0. For three-phase, three-wire system, i
a
+i
b
+i
c
=
0, which implies that i
0
= 0. Using these details, the above transformations in equations (4.56)
and (4.57) result to the following.
_
v
_
=
_
2
3
_
1
1
2
1
2
0
3
2
3
2
_
_
_
v
a
v
b
v
c
_
_
(4.58)
_
i
_
=
_
2
3
_
1
1
2
1
2
0
3
2
3
2
_
_
_
i
a
i
b
i
c
_
_
(4.59)
131
From equation (4.58), and using v
a
+ v
b
+ v
c
= 0, we get the following.
v
=
_
2
3
_
v
a
v
b
+ v
c
2
_
=
_
2
3
_
v
a
v
b
2
v
c
2
_
=
_
2
3
_
v
a
v
b
2
_
v
a
2
v
b
2
__
=
_
3
2
v
a
(4.60)
v
=
_
2
3
_
3
2
v
b
3
2
v
c
_
=
_
2
3
_
3
2
v
b
3
2
(v
a
v
b
)
_
=
_
2
3
_
3
2
v
b
+
3
2
v
a
+
3
2
v
b
_
=
1
2
v
a
+
2 v
b
(4.61)
Writing equations (4.60) and (4.61) in matrix form we get,
_
v
_
=
_
_
3
2
0
1
2
_
_
v
a
v
b
_
(4.62)
Similary, using i
a
+ i
b
+ i
c
= 0 the following can be written.
_
i
_
=
_
_
3
2
0
1
2
_
_
i
a
i
b
_
(4.63)
According to the pq theory, the abc components of voltages and currents are transformed to the
and coordinates and the instantaneous powers p and q of the load can be expressed as following.
p = v
+ v
(4.64)
q = v
(4.65)
The above equations representing instantaneous active and reactive powers can be expressed in
matrix form as following [1].
_
p
q
_
=
_
v
_ _
i
_
(4.66)
132
Therefore from above equation (4.66), the components of currents can be expressed as follow-
ing.
_
i
_
=
_
v
_
1
_
p
q
_
The matrix,
_
v
_
1
is given as following.
_
v
_
1
=
1
v
2
+ v
2
_
v
_
(4.67)
From the above equation,
i
=
v
v
2
+ v
2
p
v
v
2
+ v
2
q (4.68)
i
=
v
v
2
+ v
2
p +
v
v
2
+ v
2
q (4.69)
Which can further be written as,
i
= i
p
+ i
q
(4.70)
i
= i
p
+ i
q
(4.71)
In the above equation,
i
p
=
v
v
2
+ v
2
p (4.72)
i
q
=
v
v
2
+ v
2
q (4.73)
i
p
=
v
v
2
+ v
2
p (4.74)
i
p
=
v
v
2
+ v
2
q (4.75)
The instantaneous active and reactive components of currents in supplying line can be calculated
from the and components of the current as given in the following.
_
i
a
i
b
_
=
_
_
3
2
0
1
2
_
1
_
i
_
=
_ _
2
3
0
6
1
2
_
_
i
p
+ i
q
i
p
+ i
q
_
=
_ _
2
3
0
6
1
2
_
_
i
p
i
p
_
+
_ _
2
3
0
6
1
2
_
_
i
q
i
q
_
_
i
ap
i
bp
_
=
_ _
2
3
0
6
1
2
_
_
i
p
i
p
_
(4.76)
133
and,
_
i
aq
i
bq
_
=
_ _
2
3
0
6
1
2
_
_
i
q
i
q
_
(4.77)
The active and reactive components of the line currents must be consistent to the basic deni-
tions. However, these components of currents have little in common with the reactive power of the
load as dened in [5]. This is shown in the following illustrations.
Example 4.1 Assume a resistive load connected as shown in the 4.7 below. It is supplied from
a symmetrical source of a sinusoidal balanced voltage with v
a
=
2V sin t, with V = 230 Volts.
Express the voltage and currents for primary and secondary side of the transformer. Express the
active and reactive component of the currents, powers and discuss them.
230 0
A
V V
n
A
I
B
I
C
I
B
V
b
I
c
I
C
V
a
I
a
V
b
V
c
V
Fig. 4.7 An unbalanced resistive load supplied by three-phase delta-star connected transformer
Solution: With he above given values, the primary side phase voltages with respect to virtual
ground could be expressed as the following.
v
A
=
2 V sin t = 230
2 sin t
v
B
=
2 V sin(t 120
o
) = 230
2 sin(t 120
o
) (4.78)
v
C
=
2 V sin(t + 120
o
) = 230
2 sin(t + 120
o
)
In phasor form,
V
A
= 2300
V
V
B
= 230120
V
V
C
= 230120
V
Therefor the primary side line-to-line voltage are expressed as following.
v
AB
=
3 V sin(t + 30
o
)
v
BC
=
3 V sin(t 90
o
) (4.79)
v
CA
=
3 V sin(t + 150
o
)
134
In phasor form,
V
AB
= 398.3730
V
V
BC
= 398.3790
V
V
CA
= 398.37150
V
These voltages are transformed to the secondaries and are expressed below.
v
a
=
3 V sin t = 398.37
2 sin(t + 30
)
v
b
=
3 V sin(t 120
o
) = 398.37
2 sin(t 90
) (4.80)
v
c
=
3 V sin(t + 120
o
) = 398.37
2 sin(t + 150
)
In phasor form,
V
a
= 398.3730
V
V
b
= 398.3790
V
V
c
= 398.37150
V
Therefore the currents on the secondary side are given below.
i
a
=
3 V
R
cos t
i
b
= 0 (4.81)
i
c
= 0
Taking V = 230 V and R = 4 , the currents on the secondary side of the transformer are given as
following.
i
a
=
v
a
R
=
3 V
4
sin t = 99.56
2 sin(t + 30
) =
2I sin(t + 30
) (4.82)
i
b
= 0
i
c
= 0
In phasor form, the above can be expressed as,
I
a
= 99.5930
A (4.83)
I
b
= 0 A (4.84)
I
c
= 0 A (4.85)
This phase-a current i
a
in the secondary side of transformer is transformed to the primary of the
delta connected winding, therefore the currents on the secondary side of transformer are given as
following.
i
A
=
2I sin(t + 30
) (4.86)
i
B
= i
A
=
2I sin(t + 30
)
i
C
= 0
135
The above can be written in phasor form as given below.
I
A
= 99.5930
o
= I30
o
A
I
B
= I
A
= 1 180
o
99.5930
o
= 99.59 150
o
= I 150
o
A (4.87)
I
C
= 0 A
After, knowing the voltages and currents of the primary side of the transformer, their and
components are expressed as below.
_
v
_
=
_
_
3
2
0
1
2
_
_
v
A
v
B
_
(4.88)
Substituting v
A
and v
B
from (4.78) in the above equation, we get the following.
_
v
_
=
_
_
3
2
0
1
2
_
_
2 V sin t
2 V sin(t 120
)
_
=
_
3 V sin t
3 V cos(t)
_
(4.89)
And,
_
i
_
=
_
_
3
2
0
1
2
_
_
i
A
i
B
_
=
_
_
3
2
0
1
2
_
_
2 I sin(t + 30
2 I sin(t + 30
)
_
=
_
3 I sin(t + 30
)
I sin(t + 30
)
_
(4.90)
Based on the above the active and reactive powers are computed as below.
p(t) = v
+ v
3V sin(t)
3I sin(t + 30
3V cos(t)(I) sin(t + 30
))
= 2
3V I sin(t + 30
)
_
3
2
sin(t) +
1
2
cos(t)
_
=
3V I [2 sin(t + 30) sin(t + 30)]
=
3V I
_
2 sin
2
(t + 30
3V I [1 cos 2(t + 30
)] (4.91)
q(t) = v
3V sin(t) {I sin(t + 30
)} (
3V cos(t))
3I sin(t + 30
)
=
3V I 2 sin(t + 30
)
_
1
2
sin t
3
2
cos t
_
=
3V I 2 sin(t + 30
)(cos(t + 30
))
=
3V I sin 2(t + 30
) (4.92)
136
Based on above values of p and q powers, the and components of active and reactive compo-
nents are given below.
_
i
_
=
_
i
p
+ i
q
i
p
+ i
q
_
Where,
i
p
=
v
v
2
+ v
2
p
=
3V sin(t)
(
3V sin(t))
2
+ (
3V cos(t))
2
p
=
1
3V
sin(t)
3V I(1 cos 2(t + 30
))
= I sin t {1 cos 2(t + 30
)} (4.93)
Similarly,
i
p
=
v
v
2
+ v
2
p
=
3V cos(t)
(
3V I sin(t))
2
+ (
3V cos(t))
2
p
=
3V cos(t)
3V
2
3V I(1 cos 2(t + 30
))
= I cos t {1 cos 2(t + 30
)} (4.94)
i
q
=
v
v
2
+ v
2
q
=
(
3V cos t)
3V
2
3V I sin 2(t + 30
)
= I cos t sin 2(t + 30
) (4.95)
i
q
=
v
v
2
+ v
2
q
=
3V sin t
3V
2
3V I sin 2(t + 30
)
= I sin t sin 2(t + 30
) (4.96)
Thus knowing i
p
, i
q
, i
p
and i
q
we can determine active and reactive components of currents on
the source side as giben below.
_
i
ap
i
bp
_
=
_
C
1
_
i
p
i
p
_
137
Where,
[C]
1
=
_
_
3
2
0
1
2
_
1
=
__
2
3
0
1
6
1
2
_
Using above equation, we can nd out the active and reactive components of the current, as given
below.
_
i
ap
i
bp
_
=
__
2
3
0
1
6
1
2
_
_
I sin t {1 cos 2(t + 30
)}
I cos t {1 cos 2(t + 30
)}
_
From the above,
i
ap
=
_
2
3
I sin t {1 cos 2(t + 30
)}
=
_
2
3
I
2
{2 sin t 2 sin t cos 2(t + 30
)}
=
I
6
{2 sin t sin(3t + 60
) sin(t 60
)}
=
I
6
{2 sin t + sin(t + 60
) sin(3t + 60
)}
i
bp
=
1
6
i
p
+
1
2
i
p
=
1
6
I sin t {1 cos 2(t + 30
)} +
1
2
(I cos t) {1 cos 2(t + 30
)}
= I {1 cos 2(t + 30
)}
_
sin t
6
+
cos t
2
_
=
2I
6
{1 cos 2(t + 30
)}
_
1
2
sin t +
3
2
cos t
_
=
2I
6
{1 cos 2(t + 30
)} sin(t + 60
)
=
2I
6
{sin(t + 60
) sin(t + 60
) cos 2(t + 30
)}
=
2I
6
_
sin(t)
1
2
+ cos(t)
3
2
+
1
2
sin(t)
1
2
sin(3t + 120
)
_
=
I
6
{sin(t) + 2 sin(t + 60
) sin(3t + 120
)}
138
i
aq
=
_
2
3
i
q
=
_
2
3
I
2
{2 sin 2(t + 30
) cos t}
=
I
6
{sin(t + 60
) + sin(3t + 60
)}
i
bq
=
1
6
i
q
+
1
2
i
q
=
1
6
I cos t {sin 2(t + 30
)} +
1
2
(I sin t) {sin 2(t + 30
)}
=
I
6
2 sin 2(t + 30
)
_
1
2
cos t +
3
2
sin t)
_
=
I
6
2 sin 2(t + 30
) sin(t 30
)
=
I
6
{cos(t + 90
) cos(3t + 30
)}
=
I
6
{sin(t) cos(3t + 30
)}
Thus we have,
i
ap
=
I
6
{2 sin t + sin(t + 60
) sin(3t + 60
)} (4.97)
i
bp
=
I
6
{sin(t) + 2 sin(t + 60
) sin(3t + 120
)} (4.98)
i
aq
=
I
6
{sin(t + 60
) + sin(3t + 60
)} (4.99)
i
bq
=
I
6
{sin(t) cos(3t + 30
)} . (4.100)
From the above equations, the names instantaneous active current and instantaneous reactive cur-
rent given in the pq theory do not have commonality with the notion of active and reactive currents
used in electrical engineering. Also, the reactive current i
q
occurs in supply lines of load in spite
of the absence of the reactive element of the in the load. Furthermore, the nature of load is linear
and harmonics are absent, still resolutions of active and reactive components of the current based
on pq theory gives harmonics. For example, in the above discussion,
i
ap
=
I
6
{2 sin t + sin(t + 60
) sin(3t + 60
)} (4.101)
is the active current component in the line a and it contains the third order harmonic. This
contradicts the basic notion of the active current that was introduced to electrical engineering by
139
Fryze [5]. Thus, it seems a major misconception of electrical phenomenon in three phase circuits
with balanced sinusoidal voltages for linear load that do not have harmonics. Moreover, the active
current i
p
that results from pq theory is not the current that should remain in the supply lines after
the load is compensated to unity power factor as dened by Fryze. Therefore it can not be a com-
pensation goal.
Also, it is evident that the instantaneous reactive power q(t) as dened by pq theory does not
really identify the power properties of load instantaneously. For example for the above discussion,
the active and reactive power are given as following.
p(t) =
3V I {1 cos 2(t + 30
)}
q(t) =
3V I sin 2(t + 30
)
The following points are noted.
1. The active components of currents (i
ap
, i
bp
, i
cp
) and reactive components of currents, (i
aq
, i
bq
, i
cq
)
contain third harmonic, which is not possible for a linear load as discussed above.
2. The sum of reactive components of currents, i
aq
and i
bq
is not equal to zero, i.e., i
aq
+i
bq
= 0),
even though no overall reactive power is required from the load.
3. The instantaneous reactive power q(t) dened by pq theory does not identify the power prop-
erties of the load instantaneously. Both powers p(t) and q(t) are time varying quantities, so
that a pair of their values at any single point of time does not identify the power properties
of load. The possibility of instantaneous identication of active and reactive power p(t) and
q(t) does not mean that power properties of load are identied instantaneously. For example,
At ( + 30
) = 90
,
_
p(t) = 2
3V I
q(t) = 0
_
The above implies that as if it is resistive load.
Similarly at ( + 30
) = 0
,
_
p(t) = 0
q(t) = 0
_
Which implies as there is no load.
And when ( + 30
) = 105
,
_
p(t) =
3V I (1 +
_
3
2
)
q(t) =
3 V I(
1
2
)
_
implies as it is capacitive load.
Similarly when ( + 30
) = 75
,
_
p(t) =
3V I (1 +
_
3
2
)
q(t) =
3 V I(
1
2
)
_
implies as if the load is inductive.
140
We therefore conclude that power properties cannot be identied without monitoring of the p(t)
and q(t) powers over the entire cycle period. For example, in above case, the instantaneous reactive
power q(t) has occurred is not because of load reactive power Q but because of voltage unbalance.
This unbalance nature of load can not be identied by instantaneous reactive power q(t) values.
Therefore, pq theory gives no advantage with respect to the time interval needed to identify the
nature of load and its property over the the over power theories based on time domain or frequency
domain approach that required the system to be monitored over one period.
Thus, we have seen that each phase has some reactive power. But there is no reactive element.
This reactive power appear because of unbalance in the system and not because of reactive compo-
nent. So this is an additional information what is required. From this illustration, it is evident that
the instantaneous reactive power current has commonality with the load reactive power Q. It also
appears that the instantaneous active current in pq theory (i
ap
, i
bp
, i
cp
) have no commonality with
the load active power P.
Powers computation
The secondary side powers are given as following.
S
a
= P
a
+ jQ
a
= V
a
I
a
= 398.3730
99.59 30
= 39675 VA
Thus, P
a
= 39675 W, Q
a
= 0 VAr
S
b
= P
b
+ jQ
b
= V
b
I
b
= 398.37 90
0 = 0 VA
P
b
= 0 W, Q
b
= 0 VAr
S
c
= P
c
+ jQ
c
= V
c
I
c
= 398.37150
0 = 0 VA
P
c
= 0 W, Q
c
= 0 VAr
The total active and reactive powers on the secondary side are given as following.
P = P
a
+ P
b
+ P
c
= 39675 W
Q = Q
a
+ Q
b
+ Q
c
= 0 VAr
S
vect
= S
arith
= P = 39675 VA
pf
vect
= pf
arith
= P/S = 1.0
The primary side powers are given as following.
S
A
= P
A
+ jQ
A
= V
a
I
a
= 2300
99.59 30
= 19837.50 j11453.16 VA
Thus, P
A
= 19837.50 W, Q
A
= 11453.160 VAr
S
B
= P
B
+ jQ
B
= V
b
I
b
= 230 120
(99.5930
=
P
B
= 19837.50 W, Q
B
= 11453.160 VAr
S
C
= P
C
+ jQ
C
= V
C
I
C
= 230120
0
P
C
= 0 W, Q
C
= 0 VAr
141
The total active and reactive powers on the primary side are given as following.
P = P
a
+ P
b
+ P
c
= 39675 W
Q = Q
a
+ Q
b
+ Q
c
= 0 VAr
S
vect
=
S
A
+ S
B
+ S
C
= P = 39675 VA
S
arith
=
S
A
S
B
S
C
= 22906 + 22906 + 0 = 45813 VA
pf
vect
= P/S
vect
= 1.0
pf
arith
= P/S = 39675/45813 = 0.866
Example 4.2: Assume an Inductive load connected as shown in the 4.7 below. It is supplied from
a symmetrical source of a sinusoidal balanced voltage with v
a
=
2V sin t, with V = 230 Volts.
Express the voltage and currents for primary and secondary side of the transformer. Express the
active and reactive component of the currents, powers and discuss them.
X
230 0
A
V V
n
A
I
B
I
C
I
B
V
C
V
a
I
a
V
b
V
c
V
b
I
c
I
Fig. 4.8 An unbalanced reactive load supplied by three-phase delta-star connected transformer
Solution: With the above given values, the primary side phase voltages with respect to virtual
ground could be expressed as the following.
v
A
=
2 V sin t = 230
2 sin t
v
B
=
2 V sin(t 120
o
) = 230
2 sin(t 120
o
) (4.102)
v
C
=
2 V sin(t + 120
o
) = 230
2 sin(t + 120
o
)
Therefore, the primary side line-to-line voltage are expressed as following.
v
AB
=
3 V sin(t + 30
)
v
BC
=
3 V sin(t 90
)
v
CA
=
3 V sin(t + 150
)
These voltages are transformed to the secondaries and are expressed below.
v
a
=
3 V sin t = 398.37
2 sin(t + 30
)
v
b
=
3 V sin(t 120
o
) = 398.37
2 sin(t 90
)
v
c
=
3 V sin(t + 120
o
) = 398.37
2 sin(t + 150
)
142
In phasor form, the above voltages are expressed as below.
V
a
=
3 V 30
V
b
=
3 V 90
V
c
=
3 V 150
Therefore, the currents on the secondary side are given below.
i
a
=
3 V
X
sin(t 60
) = 99.59
2 sin(t 60
)
i
b
= 0
i
c
= 0
In phasor form, the above can be expressed as,
I
a
= 99.59 60
A.
The above phase-a current (i
a
) is transformed to the primary of the delta connected winding. Since
the currents should have 90
phase shift with respect to the voltages across the windings as given
by (4.103), therefore the currents on the secondary side of transformer are given as following.
i
A
= = i
AB
= i
a
=
2I sin(t 60
o
)
i
B
= i
A
=
2I sin(t 60
)
i
C
= 0
In phasor form, the above can be expressed as,
I
A
= I 60
= 99.59 60
A
I
B
= I 60
= 99.59 60
A
I
C
= 0 A.
After, knowing the voltages and currents of the primary side of the transformer, their and
components are expressed as below.
_
v
_
=
_
_
3
2
0
1
2
_
_
v
A
v
B
_
Substituting v
A
and v
B
from (4.102) in the above equation, we get the following.
_
v
_
=
_
_
3
2
0
1
2
_
_
2 V sin t
2 V sin(t 120
)
_
=
_
3 V sin t
3 V cos(t)
_
(4.103)
And,
_
i
_
=
_
_
3
2
0
1
2
_
_
i
A
i
B
_
=
_
_
3
2
0
1
2
_
_
2 I sin(t 60
2 I sin(t 60
)
_
=
_
3 I sin(t 60
)
I sin(t 60
)
_
(4.104)
143
Based on the above, the active and reactive powers are computed as below.
p(t) = p
= v
+ v
3V sin(t)
3I sin(t 60
) + (
3V cos t)(I sin(t 60
))
= 2
3V I sin(t 60
)
_
3
2
sin t +
1
2
cos t
_
=
3V I [2 sin(t 60
) cos(t 60
)]
=
3V I sin 2(t 60
) (4.105)
q(t) = v
3V sin t {I sin(t 60
)} (
3V cos t)
3I sin(t 60
)
=
3V I 2 sin(t 60
)
_
1
2
sin t
3
2
cos t
_
=
3V I 2 sin(t 60
)(sin(t 60
))
=
3V I 2 sin
2
(t 60
)
=
3V I {1 cos 2(t 60
)} (4.106)
Based on above values of p and q powers, the and components of active and reactive compo-
nents are given below.
_
i
_
=
_
i
p
+ i
q
i
p
+ i
q
_
Where,
i
p
=
v
v
2
+ v
2
p
=
3V sin t
(
3V sin t)
2
+ (
3V cos t)
2
p
=
1
3V
sin t
3V I(sin 2(t 60
))
= I sin t sin 2(t 60
) (4.107)
Similarly,
144
i
p
=
v
v
2
+ v
2
p
=
3V cos t
(
3V I sin t)
2
+ (
3V cos t)
2
p
=
3V cos t
3V
2
3V I sin 2(t 60
)
= I cos t sin 2(t 60
) (4.108)
i
q
=
v
v
2
+ v
2
q
=
(
3V cos t)
3V
2
_
3V I {1 cos 2(t 60
)}
_
= I cos t(1 cos 2(t 60
)) (4.109)
i
q
=
v
v
2
+ v
2
q
=
3V sin t
3V
2
_
3V I {1 cos 2(t 60
)}
_
= I sin t {1 cos 2(t 60
)} (4.110)
Thus, knowing i
p
, i
q
, i
p
and i
q
, we can determine active and reactive components of currents
on the source side as given below.
_
i
ap
i
bp
_
=
_
C
1
_
i
p
i
p
_
Where,
[C]
1
=
_
_
3
2
0
1
2
_
1
=
__
2
3
0
1
6
1
2
_
(4.111)
Using above equation, we can nd out the active and reactive components of the current, as given
below.
_
i
ap
i
bp
_
=
__
2
3
0
1
6
1
2
_
_
I sin t sin 2(t 60
)
I cos t sin2(t 60
)
_
From the above,
145
i
ap
=
_
2
3
I sin t sin 2(t 60
)
=
_
2
3
I
2
{2 sin t sin 2(t 60
)}
=
I
6
{cos(t 2t + 120
) cos(3t 120
)}
=
I
6
{cos(t 120
) cos(3t 120
)} (4.112)
i
bp
=
1
6
i
p
+
1
2
i
p
=
1
6
I sin t {sin 2(t 60
)} +
1
2
(I cos t) {sin 2(t 60
)}
=
I
6
{2 sin 2(t 60
)}
_
1
2
sin t +
3
2
cos t
_
=
I
6
{2 sin 2(t 60
) sin(t + 60
)}
=
I
6
{cos(t 180
) cos(3t 60
)}
=
I
6
{cos t + cos(3t 60
)}
i
aq
=
_
2
3
i
q
=
_
2
3
I {1 cos 2(t 60
)} cos t
=
I
6
{2 cos t 2 cos t cos 2(t 60
)}
=
I
6
{2 cos t cos(3t 120
) cos(t 120
)}
=
I
6
{2 cos t + cos(t 120
) + cos(3t 120
)} (4.113)
146
i
bq
=
1
6
i
q
+
1
2
i
q
=
1
6
[I cos t {1 cos 2(t 60
)}] +
1
2
[I sin t {1 cos 2(t 60
)}]
=
I
6
2 {1 cos 2(t 60
)}
_
1
2
cos t
3
2
sin t)
_
=
I
6
2 {1 cos 2(t 60
)}
_
1
2
cos t +
3
2
sin t)
_
=
I
6
2 {1 cos 2(t 60
} cos(t 60
)
=
I
6
{2 cos(t 60
) 2 cos(t 60
) cos 2(t 60
)}
=
I
6
{2 cos(t 60
) + cos 3 t cos(t 60
)} (4.114)
Thus we have,
i
ap
=
I
6
{cos(t 120
) cos(3t 120
)}
i
bp
=
I
6
{cos(t) + cos(3t 60
)}
i
aq
=
I
6
{2 cos t + cos(t 120
) + cos(3t 120
)}
i
bq
=
I
6
{2 cos(t 60
) + cos 3 t cos(t 60
)} .
From above equations, it is clear that there exist active components of current which also have third
harmonic component. Also, the reactive components too have third harmonics. This again does
not match with denitions of active and reactive components of currents proposed by Fryze [5].
Powers computation
The secondary side powers are given as following.
S
a
= P
a
+ jQ
a
= V
a
I
a
= 398.3730
99.5960
= 39673.836190
VA
Thus, P
a
= 0 W, Q
a
= 39673.8361 VAr
S
b
= P
b
+ jQ
b
= V
b
I
b
= 398.37 90
0 = 0 VA
P
b
= 0 W, Q
b
= 0 VAr
S
c
= P
c
+ jQ
c
= V
c
I
c
= 398.37150
0 = 0 VA
P
c
= 0 W, Q
c
= 0 VAr
147
The total active and reactive powers on the secondary side are given as following.
P = P
a
+ P
b
+ P
c
= 0 W
Q = Q
a
+ Q
b
+ Q
c
= 39673.83 VAr
S
vect
= S
arith
= Q = 39673.83 VA
pf
vect
= pf
arith
= P/S = 0
The primary side powers are given as following.
S
A
= P
A
+ jQ
A
= V
a
I
a
= 2300
99.5960
= 11452.85 + j19836.91 VA
Thus, P
A
= 11452.85 W, Q
A
= 19836.91 VAr
S
B
= P
B
+ jQ
B
= V
b
I
b
= 230 120
(99.59 120
=
P
B
= 11452.85 W, Q
B
= 19836.91 VAr
S
C
= P
C
+ jQ
C
= V
C
I
C
= 230120
0
P
C
= 0 W, Q
C
= 0 VAr
The total active and reactive powers on the primary side are given as following.
P = P
a
+ P
b
+ P
c
= 0 W
Q = Q
a
+ Q
b
+ Q
c
= 39673.82 VAr
S
vect
=
S
A
+ S
B
+ S
C
= 39673.82 VA
S
arith
=
S
A
S
B
S
C
= 22906 + 22906 + 0 = 45811.4 VA
pf
vect
= P/S
vect
= 0
pf
arith
= P/S = 0
Example 4.3: Consider the star-delta connected ideal transformer with 1:1 turn ratio as shown in
Fig. 2. The secondary side of transformer, a load of 2 ohms is connected between the phase-a and
b. Compute the following.
(a) Time domain expressions of currents in each phase on both primary and secondary side.
(b) Does the load require reactive power from the source? If any, nd its value. Also compute
the reactive power on each phase of either side of transformer.
(c) Also determine active powers on each phase and overall active power on either side of the
transformer.
(d) If you have similar arrangement with balanced load and same output power, comment upon
the rating of line conductors and transformers.
Solution In this example, we have three phase star-delta connected transformer of turns ratio 1:1
with star side connected to three phase balanced voltage source and neutral connected to ground.
148
Thus, in this three phase star delta connected transformer, delta side phase voltages equal the star
side line voltages. The primary side instantaneous phase voltages are given by,
v
A
= 230
2 sin(t) = 325.27 sin(t)
v
B
= 230
2 sin(t 120
) = 325.27 sin(t 120
).
v
C
= 230
2 sin(t + 120
) = 325.27 sin(t + 120
)
Therefore, instantaneous line to line voltages at delta side (secondary) are given by,
v
ab
= 230
2 sin(t) = 325.27 sin(t)
v
bc
= 230
2 sin(t 120
) = 325.27 sin(t 120
)
v
ca
= 230
2 sin(t + 120
) = 325.27 sin(t + 120
).
Therefore, instantaneous phase voltages with respect to ground are given as follows.
v
a
=
230
3
sin(t 30
) = 132.79
2 sin(t 30
)
v
b
=
230
3
sin(t 150
) = 132.79
2 sin(t 150
)
v
c
=
230
3
sin(t + 90
) = 132.79
2 sin(t + 90
)
(a) On delta side, we have a resistive load of R = 3 connected between terminals a and b. Thus,
expression for instantaneous currents owing out of terminals a, b and c of the transformer are
given by,
i
a
=
v
ab
R
=
230
2
3
sin t = 76.67
2 sin t
i
b
= i
a
=
v
ab
R
=
230
2
3
sin t = 76.67
2 sin t
i
c
= 0
Therefore, the winding currents on the secondary side are given as below.
i
ab
= 76.67
2 sin t = 108.41 sin t
i
bc
= 0
i
ca
= 0
These currents are transformed to the primary windings. Thus, the time domain expressions of
these currents are given as below.
149
i
A
= 76.67
2 sin t
i
B
= 0
i
C
= 0
(b) Load does not require any reactive power from the source because it is a purely resistive load.
This fact can also be veried by the looking at the expressions for instantaneous phase voltages
and currents on star side.
(c) Similarly, no current (and hence power) is drawn by the load from phases-B and C. Thus,
various powers on the primary side are as follows.
For phase-A,
S
A
= P
A
+ jQ
A
= V
A
I
A
= 2300
76.670
= 17634.1 VA
P
A
= 17634.1 W, Q
A
= 0 VAr
For phase-B,
S
B
= P
B
+ jQ
B
= V
B
I
B
= 230 120
0 = 0 VA
P
B
= 0 W, Q
B
= 0 VAr
For phase-C,
S
C
= P
C
+ jQ
C
= V
C
I
C
= 230120
0 = 0 VA
P
C
= 0 W, Q
C
= 0 VAr
Thus, various powers on the secondary side are as follows.
For phase-a,
S
a
= P
a
+ jQ
a
= V
a
I
a
= 132.79 30
76.670
= 8817.05 j5090.53 VA
P
a
= 8817.05 W, Q
a
= 5090.53 VAr
For phase-b,
S
b
= P
b
+ jQ
b
= V
b
I
b
= 132.79 150
(76.670
) = 8817.05 + j5090.53 VA
P
b
= 8817.05 W, Q
b
= 5090.53 VAr
For phase-c,
S
c
= P
c
+ jQ
c
= V
c
I
c
= 132.7990
0 = 0 VA
P
c
= 0 W, Q
c
= 0 VAr
For the above analysis, it is observed that the total active power, P = P
A
+ P
B
+ P
C
= P
a
+
P
b
+ P
c
= 17634.1 W and total reactive power Q = Q
A
+ Q
B
+ Q
C
= Q
a
+ Q
b
+ Q
c
= 0 VAr.
However, due to unbalanced load, on delta side of the transformer phase-b and phase-c experience
reactive power as calculated above. This creates some power factor in each phase.
(d) Because, the load which is currently getting power from one phase on delta side will be shared
150
by all the three phases phase voltages being the same. Thus, required current rating of the line
conductors and transformers will be reduced.
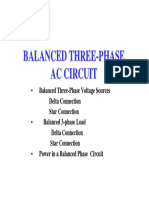
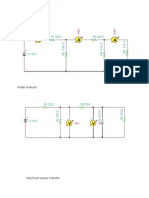
Example 4.4
Consider the a three-phase balanced system shown in Fig. 4.9. The supply voltages are: V
a
=
2200
, V
b
= 220 120
, V
c
= 220120
with balance load resistance of 1.32 . The output
power P
o
is 100 kW and the losses in the feeder are 5% of te output power. The reactance of feeder
is not considered in the study.
(a) Determine voltages at the load points, phase currents and feeder resistance.
(b) Now let us say that the load is unbalanced by connecting a resistive load between phases-a and
b with same power output. With this conguration, compute active, reactive, various apparent
powers and power factor based on them. Compute losses in the system and comment upon the
result.
(c) Now, with same losses and power output, nd an equivalent three-phase balanced circuit and
repeat (b). Comment on the result.
N
a
I
c
I
b
I
'
230 0
o
a
V
' b
V
r
r
r
a
R
b
R
c
R ' c
V
b
V
c
V
a
V
Fig. 4.9 Study on three-phase unbalanced system
Solution:
(a) For the given system the phase voltages are V
a
= 2200
, V
b
= 220120
, V
c
= 220120
.
The load active power is 100 kW with 5% losses in the feeder, i.e., P
s
= 5 kW. Using above
parameters the RMS value of the phase voltage is computed as following.
P
o
= 100 1000 = 3
V
2
1.32
From the above equation, value of V is given as following.
V =
_
100000 1.32
3
= 209.76 V
Thus, the rms value of phase currents is given by,
I =
V
R
=
209.76
1.32
= 159.9 A
151
The voltage drop across the feeder is found using following equation.
V = 230 209.76 = 20.23 V
For 5% losses in the feeder, the value of feeder resistance can be computed as below.
3 (158.9)
2
r = 0.05 100 1000
which implies, r = 0.066
Since the load is balanced, the various apparent powers (arithmetic, vector and effective) are same.
These are computed below.
S
A
= S
a
+ S
b
+ S
c
= V
a
I
a
+ V
b
I
b
+ V
c
I
c
= 3 V
a
I
a
= 3 209.5 158.9
= 100 kVA
Now we compute the vector apparent power (S
v
) as given below.
S
v
=
_
P
2
+ Q
2
=
_
(V
a
I
a
cos
a
+ V
b
I
b
cos
b
+ V
c
I
c
cos
c
)
2
+ (V
a
I
a
sin
a
+ V
b
I
b
sin
b
+ V
c
I
c
sin
c
)
2
=
_
(3 V
a
I
a
cos
a
)
2
+ (3 V
a
I
a
sin
a
)
2
= 3 V
a
I
a
= 100 kVA
Similarly, the effective apparent power can be computed as below.
S
e
= 3 V
e
I
e
= 3V
a
I
a
= 100 kVA
The power factors based on above apparent powers are given below.
pf
A
= pf
v
= pf
e
= 1.0
Now an unbalanced circuit with same power output is considered. This is achieved by placing a
resistance of 1.17 between any two phases (say between phases a and b). This is shown in Fig.
4.10.
For this circuit, the line currents are computed as below. Let I be the RMS value of the line
current, then following equation must be satised.
I
2
R = 100 1000
(4.115)
From the above equation, I is given as below.
I =
_
100000
1.17
= 292.35 A
152
'
a
'
c
'
n
a
b
c
n
V
a
V
b
V
c
R
I
a
I
n
I
b
I
c
'
r
r
r
r
Fig. 4.10 Three-phase unbalanved circuit
Thus, phase currents are as following.
I
a
= 292.3530
A
I
b
= I
a
= 292.3530
A
I
c
= 0 A
Knowing the currents in the circuit we can compute the voltages V
a
, V
b
and V
c
as following.
V
a
= 2200
292.2530
0.066
= 220 (16.67 + j9.9296)
= 223.33 j9.6296
= 203.55 2.70
V
Similarly, voltages V
b
and V
c
can be computed which are given below.
V
b
= 220 120
(292.2530
) 0.066
= 203.55 117.29
V
V
c
= 220120
0 0.066 = 220120
Thus, V
a
= V
b
= 203.55 V and V
c
= 0 V. Knowing three-phase voltages and currents, the active
and reactive powers are computed as following.
S
a
= V
a
I
a
= 203.55 2.70
292.35 30
= 50088.79 j 32156.42
= P
a
+ jQ
a
Thus, S
a
=
_
P
2
a
+ Q
2
a
= 59522.46 VA
S
b
= V
b
I
b
= 203.55 117.3
292.35150
= 50088.79 + j 32156.42
= P
b
+ jQ
b
Thus, S
b
=
_
P
2
b
+ Q
2
b
= 59522.46 VA
153
S
c
= V
c
I
c
= 220120
0
= 0 + j 0
= P
c
+ jQ
c
Thus, S
c
=
_
P
2
c
+ Q
2
c
= 0 VA
Based on the computations of active and reactive powers in the above, we shall compute arithmetic,
vector and effective apparent powers and corresponding power factors.
S
A
= S
a
+ S
b
+ S
c
= 59522.46 + 59522.46 + 0 = 119094.92 VA
S
v
= |S
v
| = |S
a
+ S
b
+ S
c
| = 100177.58 VA
The effective apparent power is computed as following.
S
e
= 3 V
e
I
e
= 3
_
V
2
a
+ V
2
b
+ V
2
c
3
_
I
2
a
+ I
2
b
+ I
2
c
3
=
_
V
2
a
+ V
2
b
+ V
2
c
_
I
2
a
+ I
2
b
+ I
2
c
=
203.6
2
+ 203.6
2
+ 220
2
292.35
2
+ 292.35
2
+ 0
2
= 149816.05 VA
Based on above apparent powers, the power factor are as following.
pf
A
= 100000/119044.92 = 0.84
pf
v
= 1000000/100000 = 1.0
pf
e
= 100000/149816.05 = 0.667
The power loss in the feeders is computed as below.
P
loss
= I
2
a
r + I
2
b
r + I
2
c
r
= 292.35
2
0.066 + 292.35
2
0.066 + 0
= 11260 = 11.26 kW
Thus it is observed that when the energy is delivered to the unbalanced load, the power loss in
the supply increases from 5 to 11.26 kW. It means that currents on the lines have increased and this
implies that an unbalanced purely resistive load cannot be considered as unity power factor load.
The calculation of the power factor using the vector apparent power leads to a value which is equal
to unity. This disqualies, the vector apparent power S
v
as an acceptable denition of the apparent
power in the presence of the load unbalance.
Since the value of the apparent power of balanced load is independent of this power denition,
we could ask the question: what is apparent power of a balanced load with the active power P =
100 kW , that causes same power loss of 11.26 kW, as the unbalanced load discussed earlier. For
154
power loss of 11.26 kW the following equation holds true.
3 I
2
r = 11260
Therefore, I =
_
11260
3 0.066
= 283.01 A
Now we use the condition of output power as below.
P
0
= 100000 = 3 I
2
R
Implying that, R =
_
100000
3 238.015
= 0.59
The total input power must be equal to output power + losses. Therefore,
P
i
= 11260 = 3 220 I cos
Implying cos =
112600
220 238.05
= 0.7078 = = 44.94
From the above equation,
tan = tan 44.94
= 0.9978 =
X
R + r
Therefore, X = 0.9978 (0.59 + 0.0659) = 0.65 .
Therefore, load impedance (Z) is given as below.
Z = 0.59 + j0.65
(4.116)
Knowing above parameters the voltages at the load points can be computed which are given below.
V
a
= 2200
238.01544.94
0.0659
= 220 11.1 j11.07 = 208.89 j 11.07
= 209.18 3.03
V
Similarly, V
b
= 209.18 123.03
V
V
c
= 209.18116.97
V
The phase currents are as following.
I
a
= 238.015 44.94
A
I
b
= 238.015 164.94
A
I
c
= 238.015 75.06
A
For this equivalent balanced circuit (with same output power and power loss), the three apparent
powers i.e., arithmetic, vector and effective are same and these are as following.
S
A
= S
v
= S
e
= 3 V
a
I
a
= 3 209.18 238.015 = 149.363 kVA
and P = P
a
+ P
b
+ P
c
= 100 kW
Thus the power factor based on the above apparent powers will also be same. Therefore,
pf
a
= pf
v
= pf
e
= 100/149.363 = 0.67
155
4.3 Theory of Instantaneous Symmetrical Components
The theory of instantaneous symmetrical components can be used for the purpose of load balanc-
ing, harmonic suppression, and power factor correction [2], [4]. The control algorithms based on
instantaneous symmetrical component theory can practically compensate any kind of unbalance
and harmonics in the load, provided we have a high band width current source to track the lter
reference currents. These algorithms have been derived in this section. For any set of three-phase
instantaneous currents or voltages, the instantaneous symmetrical components are dened by,
_
_
i
a0
i
a+
i
a
_
_
=
1
3
_
_
1 1 1
1 a a
2
1 a
2
a
_
_
_
_
i
a
i
b
i
c
_
_
(4.117)
Similarly for three-phase instantaneous voltages, we have,
_
_
v
a0
v
a+
v
a
_
_
=
1
3
_
_
1 1 1
1 a a
2
1 a
2
a
_
_
_
_
v
a
v
b
v
c
_
_
(4.118)
In the above equations, a is a complex operator and it is given by a = e
j 2/3
and a
2
= e
j 4/3
.
It is to be noted that the instantaneous components of currents, i
a+
and i
a
are complex time
varying quantities also they are complex conjugate of each other. This same is true for v
a+
and
v
a
quantities. The terms i
a0
and v
a0
are real quantities, however (-) has been used as upper script
for the sake of uniformity of notation. These instantaneous symmetrical components are used to
formulate equations for load compensation. First a three-phase, four-wire system supplying star
connected load is considered.
4.3.1 Compensating Star Connected Load
A three-phase four wire compensated system is shown in Fig. 4.11. In the gure, three-phase load
currents (i
la
, i
lb
and i
lc
), can be unbalanced and nonlinear load. The objective in either three or
four-wire system compensation is to provide balanced supply current such that its zero sequence
component is zero. We therefore have,
sb
i
sc
i
sb
v
sc
v
lb
i
lc
i
LOAD
LOAD
N
n
n
*
fc
i
*
fa
i
*
fb
i
sa
v
sa
i la
i
Ideal
compensator
LOAD
Fig. 4.11 A three-phase four-wire compensated system
156
i
sa
+ i
sb
+ i
sc
= 0 (4.119)
Using equations (4.117)-(4.118), instantaneous positive sequence voltage (v
a+
) and current (i
a+
)
are computed from instantaneous values of v
sa
, v
sb
, v
sc
and i
sa
, i
sb
, i
sc
respectively. To have a
predened power factor from the source, the relationship between the angle of v
a+
and i
a+
is given
as following.
v
a+
= i
a+
+
+
(4.120)
Where
+
is desired phase angle between v
a+
and i
a+
. The above equation is rewritten as
follows.
_
1
3
[v
sa
+ a v
sb
+ a
2
v
sc
]
_
=
_
1
3
[i
sa
+ a i
sb
+ a
2
i
sc
]
_
+
+
L.H.S = R.H.S
L.H.S of the above equation is expressed as below
L.H.S =
_
1
3
_
v
sa
+
_
1
2
+ j
3
2
_
v
sb
+
_
1
2
j
3
2
_
v
sc
__
=
_
1
3
_
_
v
sa
v
sb
2
v
sc
2
_
+ j
3
2
(v
sb
v
sc
)
__
= tan
1
(
3/2) (v
sb
v
sc
)
(v
sa
v
sb
/2 v
sc
/2)
= tan
1
K
1
K
2
(4.121)
Where, K
1
= (
3/2) (v
sb
v
sc
) and K
2
= (v
sa
v
sb
/2 v
sc
/2). Similarly R.H.S of the equa-
tion is expanded as below.
R.H.S =
_
1
3
_
i
sa
+
_
1
2
+ j
3
2
_
i
sb
+
_
1
2
j
3
2
_
i
sc
__
+
+
=
_
1
3
_
_
i
sa
i
sb
2
i
sc
2
_
+ j
3
2
(i
sb
i
sc
)
__
+
+
= tan
1
(
3/2) (i
sb
i
sc
)
(i
sa
i
sb
/2 i
sc
/2)
+
+
= tan
1
K
3
K
4
+
+
(4.122)
157
Where, K
3
= (
3/2) (i
sb
i
sc
) and K
4
= (i
sa
i
sb
/2 i
sc
/2). Equating (4.121) and (4.122),
we get the following.
tan
1
K
1
K
2
= tan
1
K
3
K
4
+
+
Taking tangent on both sides, the following is obtained.
tan
_
tan
1
K
1
K
2
_
= tan
_
tan
1
K
3
K
4
+
+
_
Therefore,
K
1
K
2
=
(K
3
/K
4
) + tan
+
1 (K
3
/K
4
) tan
+
K
1
K
2
=
K
3
+ K
4
tan
+
K
4
K
3
tan
+
The above equation implies that,
K
1
K
4
K
1
K
3
tan
+
K
2
K
3
K
2
K
4
tan
+
= 0
Substituting the values of K
1
, K
2
, K
3
, K
4
in the above equation, the following expression is ob-
tained.
3
2
(v
sb
v
sc
)
_
i
sa
i
sb
2
i
sc
2
_
3
4
(v
sb
v
sc
) (i
sb
i
sc
) tan
+
3
2
_
v
sa
v
sb
2
v
sc
2
_
(i
sb
i
sc
)
_
v
sa
v
sb
2
v
sc
2
_
_
i
sa
i
sb
2
i
sc
2
_
tan
+
= 0
Above equation can be arranged with terms associated with i
sa
, i
sb
and i
sc
. This is given below.
_
3
2
(v
sb
v
sc
) +
tan
+
2
(v
sb
+ v
sc
2 v
sa
)
_
i
sa
+
_
3
2
(v
sc
v
sa
) +
tan
+
2
(v
sc
+ v
sa
2 v
sb
)
_
i
sb
+
_
3
2
(v
sa
v
sb
) +
tan
+
2
(v
sa
+ v
sb
2 v
sc
)
_
i
sc
= 0
Dividing above equation by
3
2
, it can be written as follows.
_
(v
sb
v
sc
) +
tan
+
3
(v
sb
+ v
sc
2 v
sa
)
_
i
sa
+
_
(v
sc
v
sa
) +
tan
+
3
(v
sc
+ v
sa
2 v
sb
)
_
i
sb
+
_
(v
sa
v
sb
) +
tan
+
3
(v
sa
+ v
sb
2 v
sc
)
_
i
sc
= 0
158
Assume = tan
+
/
3, the above equation is further simplied to,
{(v
sb
v
sc
) + (v
sb
+ v
sc
2 v
sa
)} i
sa
+{(v
sc
v
sa
) + (v
sc
+ v
sa
2 v
sb
)} i
sb
+{(v
sa
v
sb
) + (v
sa
+ v
sb
2 v
sc
)} i
sc
= 0. (4.123)
Adding and subtracting v
sa
, v
sb
and v
sc
in terms and expressing v
s0
= (v
sa
+ v
sb
+ v
sc
)/3, in
above equation, we get the following.
{(v
sb
v
sc
) 3 (v
sa
v
s0
)} i
sa
+{(v
sc
v
sa
) 3 (v
sb
v
s0
)} i
sb
+{(v
sa
v
sb
) 3 (v
sc
+ v
s0
)} i
sc
= 0. (4.124)
The third objective of compensation is that the power supplied from the source (p
s
) must be equal
to average load power (P
lavg
). Therefore the following holds true.
p
s
= v
sa
i
sa
+ v
sb
i
sb
+ v
sc
i
sc
= P
lavg
(4.125)
The above equation has important implications. For example when supply voltage are balanced,
the above equation is satised for balanced source currents. However if supply voltage are unbal-
anced and distorted, above equation gives set of currents which are also not balanced and sinusoidal
in order to supply constant power.
Equations (4.119), (4.125) and (4.124), can be written in matrix form as given below.
_
_
1 1 1
(v
sb
v
sc
) + (v
sb
+ v
sc
2v
sa
) (v
sc
v
sa
) + (v
sc
+ v
sa
2v
sb
) (v
sa
v
sb
) + (v
sa
+ v
sb
2v
sc
)
v
sa
v
sb
v
sc
_
_
_
_
i
sa
i
sb
i
sc
_
_
=
_
_
0
0
P
lavg
_
_
Which can be further written as,
_
A
_
i
sabc
=
_
P
lavg
(4.126)
Therefore,
_
i
sabc
=
_
A
1
_
P
lavg
=
1
A
_
_
a
c11
a
c12
a
c13
a
c21
a
c22
a
c23
a
c31
a
c32
a
c33
_
_
T
_
_
0
0
P
lavg
_
_
=
1
A
_
_
a
c11
a
c21
a
c31
a
c12
a
c22
a
c32
a
c13
a
c23
a
c33
_
_
_
_
0
0
P
lavg
_
_
Where a
cij
is the cofactor of i
th
row and j
th
column of A matrix in (4.126) and
A
is the deter-
minant of matrix A. Due to the presence of zero elements in rst two rows of column vector with
159
power elements, the cofactors in rst two columns need not to be computed. These are indicated
by dots in the following matrix.
_
i
sabc
=
_
_
i
sa
i
sb
i
sc
_
_
=
1
A
_
_
a
c31
a
c32
a
c33
_
_
_
_
0
0
P
lavg
_
_
=
1
A
_
_
a
c31
a
c32
a
c33
_
_
P
lavg
The determinant of matrix A is computed as below.
A
= [(v
sc
v
sa
) + (v
sc
+ v
sa
2v
sb
)]v
sc
[(v
sa
v
sb
) + (v
sa
+ v
sb
2v
sc
)]v
sb
[(v
sb
v
sc
) + (v
sb
+ v
sc
2v
sa
)]v
sc
+ [(v
sa
v
sb
) + (v
sa
+ v
sb
2v
sc
)]v
sa
+[(v
sb
v
sc
) + (v
sb
+ v
sc
2v
sa
)]v
sb
[(v
sc
v
sa
) + (v
sc
+ v
sa
2v
sb
)]v
sa
= [v
2
sc
+ v
sa
v
sc
2v
sb
v
sc
v
sa
v
sb
v
2
sb
+ 2v
sb
v
sc
v
sb
v
sc
v
2
sc
+ 2v
sa
v
sc
+v
2
sa
+ v
sb
v
sa
2v
sc
v
sa
+ v
2
sb
+ v
sc
v
sb
2v
sa
v
sb
v
sc
v
sa
v
2
sa
+ 2v
sb
v
sa
]
+(v
sc
v
sa
)v
sc
(v
sa
v
sb
)v
sb
(v
sb
v
sc
)v
sc
+(v
sa
v
sb
)v
sa
+ (v
sb
v
sc
)v
sb
(v
sc
v
sa
)v
sa
The above equation can be further simplied to,
A
= 0 + v
2
sc
v
sa
v
sc
v
sb
v
sa
+ v
2
sb
v
sb
v
sc
+ v
2
sc
+ v
2
sa
v
sa
v
sb
+ v
2
sb
v
sc
v
sb
v
sa
v
sc
+ v
2
sa
= 2v
2
sa
+ 2v
2
sb
+ 2v
2
sc
2v
sa
v
sb
2v
sb
v
sc
2v
sc
v
sa
= v
2
sa
+ v
2
sb
2v
sa
v
sb
+ v
2
sb
+ v
2
sc
2v
sb
v
sc
+ v
2
sc
+ v
2
sa
2v
sc
v
sa
= (v
sa
v
sb
)
2
+ (v
sb
v
sc
)
2
+ (v
sc
v
sa
)
2
= (v
2
sab
+ v
2
sbc
+ v
2
sca
)
Further adding and subtracting, v
2
sa
+ v
2
sb
+ v
2
sc
in above equation, we get the following.
A
= 3(v
2
sa
+ v
2
sb
+ v
2
sc
) (v
2
sa
+ v
2
sb
+ v
2
sc
+ 2v
sa
v
sb
+ 2v
sb
v
sc
+ 2v
sc
v
sa
) (4.127)
Further,
(v
sa
+ v
sb
+ v
sc
)
2
= v
2
sa
+ v
2
sb
+ v
2
sc
+ 2v
sa
v
sb
+ 2v
sb
v
sc
+ 2v
sc
v
sa
(4.128)
Using equations (4.127) and (4.128), we obtain the following.
A
= 3(v
2
sa
+ v
2
sb
+ v
2
sc
) (v
sa
+ v
sb
+ v
sc
)
2
= 3
j=a,b,c
v
2
sj
9v
2
so
= 3
_
j=a,b,c
v
2
sj
3v
2
so
_
(4.129)
160
In above equation, the termv
so
is the instantaneous zero sequence component of the source voltage
and it is given as following.
v
so
=
(v
sa
+ v
sb
+ v
sc
)
3
(4.130)
The determinant of matrix A, using (4.129), can also be expressed as,
A
= 3
_
v
2
sa
+ v
2
sb
+ v
2
sc
3 v
so
(v
sa
+ v
sb
+ v
sc
)
3
_
= 3
_
v
2
sa
+ v
2
sb
+ v
2
sc
+ 3v
2
so
2 3v
2
so
= 3[v
2
sa
+ v
2
sb
+ v
2
sc
+ v
2
so
+ v
2
so
+ v
2
so
2v
so
(v
sa
+ v
sb
+ v
sc
)]
= 3[(v
2
sa
+ v
2
so
2v
sa
v
so
) + (v
2
sb
+ v
2
so
2v
sb
v
so
) + (v
2
sc
+ v
2
so
2v
sc
v
so
)]
= 3[(v
2
sa
v
2
so
) + (v
2
sb
v
2
so
) + (v
2
sc
v
2
so
)]
The cofactors a
c31
, a
c32
, and a
c33
are computed as below.
a
c31
= [(v
sc
v
sa
) (v
sc
+ v
sa
2v
sb
) + (v
sa
v
sb
) + (v
sa
+ v
sb
2v
sc
)]
= v
sa
v
sb
v
sc
+ v
sa
+ (v
sc
v
sa
+ 2v
sb
+ v
sa
+ v
sb
2v
sc
)
= (2v
sa
v
sb
v
sc
) + 3(v
sb
v
sc
)
= (2v
sa
+ v
sa
v
sa
v
sb
v
sc
) + 3(v
sb
v
sc
)
= 3 (v
sa
v
s0
) + 3 (v
sb
v
sc
)
Similarly,
a
c32
= [(v
sa
v
sb
) (v
sa
+ v
sb
2v
sc
) + (v
sb
v
sc
) + (v
sb
+ v
sc
2v
sa
)]
= (v
sa
+ v
sb
+ v
sb
v
sc
) + (v
sa
v
sb
+ 2v
sc
+ v
sb
+ v
sc
2v
sa
)
= (2v
sb
v
sc
v
sa
) + 3(v
sc
v
sa
)
= 3(v
sb
v
so
) + 3(v
sc
v
sa
)
And,
a
c33
= [(v
sc
v
sa
) + (v
sc
+ v
sa
2v
sb
) (v
sb
v
sc
) (v
sb
+ v
sc
2v
sa
)]
= (2v
sc
v
sa
v
sb
) + 3(v
sa
v
sb
)
= 3(v
sc
v
so
) + 3(v
sa
v
sb
)
Knowing the value of cofactors, we now have,
_
_
i
sa
i
sb
i
sc
_
_
=
1
3
_
j=a,b,c
v
2
sj
3v
2
so
_
_
_
3(v
sa
v
s0
) + 3(v
sb
v
sc
)
3(v
sb
v
s0
) + 3(v
sc
v
sa
)
3(v
sc
v
s0
) + 3(v
sa
v
sb
)
_
_
_
P
lavg
=
1
_
j=a,b,c
v
2
sj
3v
2
so
_
_
_
(v
sa
v
so
) + (v
sb
v
sc
)
(v
sb
v
so
) + (v
sc
v
sa
)
(v
sc
v
so
) + (v
sa
v
sb
)
_
_
_
P
lavg
(4.131)
161
From the above equation, the desired source currents can be written as following.
i
sa
=
(v
sa
v
so
) + (v
sb
v
sc
)
j=a,b,c
v
2
sj
3 v
2
so
P
lavg
(4.132)
i
sb
=
(v
sb
v
so
) + (v
sc
v
sa
)
j=a,b,c
v
2
sj
3 v
2
so
P
lavg
(4.133)
i
sc
=
(v
sc
v
so
) + (v
sa
v
sb
)
j=a,b,c
v
2
sj
3 v
2
so
P
lavg
(4.134)
Applying Kirchoffs current law at the point of common coupling (PCC), we have,
i
fa
= i
la
i
sa
(4.135)
i
fb
= i
lb
i
sb
(4.136)
i
fc
= i
lc
i
sc
(4.137)
Replacing i
sa
, i
sb
and i
sc
from equations (4.132)-(4.134), we obtain the reference lter currents as
given in the following.
i
fa
= i
la
i
sa
= i
la
(v
sa
v
so
) + (v
sb
v
sc
)
j=a,b,c
v
2
sj
3 v
2
so
P
lavg
(4.138)
i
fb
= i
lb
i
sb
= i
lb
(v
sb
v
so
) + (v
sc
v
sa
)
j=a,b,c
v
2
sj
3 v
2
so
P
lavg
(4.139)
i
fc
= i
lc
i
sc
= i
lc
(v
sc
v
so
) + (v
sa
v
sb
)
j=a,b,c
v
2
sj
3 v
2
so
P
lavg
(4.140)
4.3.2 Compensating Delta Connected Load
The balancing of an unbalanced -connected load is a generic problem and the theory of instan-
taneous symmetrical components can be used to balance the load. The schematic diagram of this
compensated scheme is shown in Fig. 4.12. This compensator is connected between the phases of
Load
lbc
i
*
fbc
i
lab
i
*
fab
i
L
o
a
d
L
o
a
d
*
fca
i
lca
i
sa
i
sc
i
sb
i
sa
v
sb
v
sc
v
Fig. 4.12 A compensation for delta connected load
the load. The aim is to generate the three reference current waveforms denoted by i
fab
, i
fbc
, i
fca
162
respectively based on the measurement of system voltages and load currents such that the supply
sees balanced load. As was in previous case, the requirements for compensating source currents
are same. Therefore the following equations are valid.
i
sa
+ i
sb
+ i
sc
= 0 (4.141)
Applying Kirchoffs current law at nodes, we can express i
sa
, i
sb
and i
sc
respectively as following.
i
sa
= (i
lab
i
fab
) (i
lca
i
fca
)
i
sb
= (i
lbc
i
fbc
) (i
lab
i
fcb
) (4.142)
i
sc
= (i
lca
i
fca
) (i
lbc
i
fbc
)
As can be seen from above equations, equation (4.141) is satised. Since in connected load,
zero sequence current cannot ow, therefore
(i
lab
i
fab
) + (i
lbc
i
fbc
) + (i
lca
i
fca
) = 0 (4.143)
The source supplies the average load power, P
lavg
and following equation is satised.
v
sa
i
sa
+ v
sb
i
sb
+ v
sc
i
sc
= P
lavg
(4.144)
From equation (4.124), the power factor between the source voltages and currents should be met.
Thus we have,
{(v
sb
v
sc
) 3 (v
sa
v
s0
)} i
sa
+{(v
sc
v
sa
) 3 (v
sb
v
s0
)} i
sb
+{(v
sa
v
sb
) 3 (v
sc
+ v
s0
)} i
sc
= 0. (4.145)
Replacing i
sa
, i
sb
and i
sc
from (4.142), above equation can be simplied to the following.
(v
sb
v
sc
) 3(v
sa
v
s0
) [(i
lab
i
fab
) (i
lca
i
fca
)]
+(v
sc
v
sa
) 3(v
sb
v
sa
) [(i
lbc
i
fbc
) (i
lab
i
fab
)]
+(v
sa
v
sb
) 3(v
sb
v
sa
) [(i
lca
i
fca
) (i
lbc
i
fbc
)] = 0 (4.146)
Simplifying above expression we get
[{(v
sb
v
sc
) + (v
sb
+ v
sc
2v
sa
)} {(v
sc
v
sa
) + (v
sc
+ v
sa
2v
sb
)}] (i
lab
i
fab
)
. .
I
+[{(v
sc
v
sa
) + (v
sc
+ v
sa
2v
sb
)} {(v
sa
v
sb
) + (v
sa
v
sb
2v
sc
)}] (i
lbc
i
fbc
)
. .
II
+[{(v
sa
v
sb
) + (v
sa
v
sb
2v
sc
)} {(v
sb
v
sc
) + (v
sb
+ v
sc
2v
sa
)}] (i
lca
i
fca
)
. .
III
(4.147)
The rst term I is as follows:
I = {(v
sb
v
sc
v
sc
+ v
sa
) + (v
sb
+ v
sc
2v
sa
v
sc
v
sa
+ 2v
sb
)} (i
lab
i
fab
)
= {(v
sa
+ v
sb
2v
sc
) 3(v
sa
v
sb
)} (i
lab
i
fab
)
= 3 {(v
sc
v
s0
) + (v
sa
v
sb
)} (i
lab
i
fab
) (4.148)
163
Similarly, the second and third terms are given as below.
II = {(v
sc
v
sa
v
sa
+ v
sb
) + (v
sc
+ v
sa
2v
sb
v
sa
v
sb
+ 2v
sc
)} (i
lbc
i
fbc
)
= {(v
sb
+ v
sc
2v
sa
) 3(v
sb
v
sc
)} (i
lbc
i
fbc
)
= 3 {(v
sa
v
s0
) + (v
sb
v
sc
)} (i
lbc
i
fbc
) (4.149)
III = {(v
sa
v
sb
v
sb
+ v
sc
) + (v
sa
+ v
sb
2v
sc
v
sb
v
sc
+ 2v
sa
)} (i
lca
i
fca
)
= {(v
sc
+ v
sa
2v
sb
) 3(v
sc
v
sa
)} (i
lca
i
fca
)
= 3 {(v
sb
v
s0
) + (v
sc
v
sa
)} (i
lca
i
fca
) (4.150)
Summing above three terms and simplifying we get,
{(v
sc
v
s0
) + (v
sa
v
sb
)} (i
lab
i
fab
)
+{(v
sa
v
s0
) + (v
sb
v
sc
)} (i
lbc
i
fbc
)
+{(v
sb
v
s0
) + (v
sc
v
sa
)} (i
lca
i
fca
) = 0 (4.151)
The third condition for load compensation ensures that the average load power should be supplied
from the sources. Therefore,
v
sa
i
sa
+ +v
sb
i
sb
+ v
sc
i
sc
= P
lavg
(4.152)
The terms i
sa
, i
sb
and i
sc
are substituted from (4.142) in the above equation and the modied
equation is given below.
v
sa
_
(i
lab
i
fab
) (i
lca
i
fca
)
_
+ v
sb
_
(i
lbc
i
fbc
) (i
lab
i
fab
)
_
+v
sc
_
(i
lca
i
fca
) (i
lbc
i
fbc
)
_
= 0 (4.153)
(4.154)
The above is simplied to,
(v
sa
v
sb
)(i
lab
i
fab
) + (v
sb
v
sc
)(i
lbc
i
fbc
) + (v
sc
v
sa
)(i
lca
i
fca
) = 0 (4.155)
Equations (4.143), (4.151), (4.155) can be written in the matrix form as given below.
_
_
1 1 1
(v
sc
v
s0
) + (v
sa
v
sb
) (v
sa
v
s0
) + (v
sb
v
sc
) (v
sb
v
s0
) + (v
sc
v
sa
)
v
sa
v
sb
v
sb
v
sc
v
sc
v
sa
_
_
_
_
i
lab
i
fab
i
lbc
i
fbc
i
lca
i
fca
_
_
=
_
_
0
0
P
lavg
_
_
(4.156)
The above equation can be written in the following form.
[A
]
_
_
i
lab
i
fab
i
lbc
i
fbc
i
lca
i
fca
_
_
=
_
_
0
0
P
lavg
_
_
(4.157)
164
Therefore,
_
_
i
lab
i
fab
i
lbc
i
fbc
i
lca
i
fca
_
_
= [A
]
1
_
_
0
0
P
lavg
_
_
(4.158)
The above equation is solved by nding the determinate of A
and the cofactors transpose as given
below.
_
_
i
lab
i
fab
i
lbc
i
fbc
i
lca
i
fca
_
_
=
1
|A
|
_
_
a
c11
a
c12
a
c13
a
c21
a
c22
a
c23
a
c31
a
c32
a
c33
_
_
T
_
_
0
0
P
lavg
_
_
=
1
|A
|
_
_
a
c11
a
c21
a
c31
a
c12
a
c22
a
c32
a
c13
a
c23
a
c33
_
_
_
_
0
0
P
lavg
_
_
(4.159)
The determinant |A
| and cofactors in above equation are calculated below.
|A
| = [(v
sa
v
so
) + (v
sb
v
sc
)](v
sc
v
sa
) [(v
sb
v
so
) + (v
sc
v
sa
)](v
sb
v
sc
)
[(v
sc
v
so
) + (v
sa
v
sb
)](v
sc
v
sa
) + [(v
sb
v
so
) + (v
sc
v
sa
)](v
sa
v
sb
)
+[(v
sc
v
so
) + (v
sa
v
sb
)](v
sb
v
sc
) [(v
sa
v
so
) + (v
sb
v
sc
)](v
sa
v
sb
)
Separating all the terms containing and rearranging the above equation, we get,
|A
| = (v
sa
v
so
)(v
sc
v
sa
) (v
sb
v
so
)(v
sb
v
sc
) (v
sc
v
so
)(v
sc
v
sa
)
+(v
sb
v
so
)(v
sa
v
sb
) + (v
sc
v
so
)(v
sb
v
sc
) (v
sa
v
so
)(v
sa
v
sb
)
+ [(v
sb
v
sc
)(v
sc
v
sa
) (v
sc
v
sa
)(v
sb
v
sc
) (v
sa
v
sb
)(v
sc
v
sa
)
+(v
sc
v
sa
)(v
sa
v
sb
) + (v
sa
v
sb
)(v
sb
v
sc
) (v
sb
v
sc
)(v
sa
v
sb
)]
It is seen that the terms containing cancel each other and give zero. Thus, above equation
becomes,
|A
| = (v
sa
v
so
)(v
sc
v
sa
v
sa
+ v
sb
) + (v
sb
v
so
)(v
sb
+ v
sc
+ v
sa
v
sb
)(4.160)
+(v
sc
v
so
)(v
sc
+ v
sa
+ v
sb
v
sc
) + 0
In the above, using (v
sa
+ v
sb
+ v
sc
) = 3v
s0
,
v
sc
v
sa
v
sa
+ v
sb
= v
sa
+ v
sb
+ v
sc
3v
sa
= 3(v
sa
v
so
)
v
sb
+ v
sc
+ v
sa
v
sb
= v
sa
+ v
sb
+ v
sc
3v
sb
= 3(v
sb
v
so
)
v
sc
+ v
sa
+ v
sb
v
sc
= v
sa
+ v
sb
+ v
sc
3v
sc
= 3(v
sc
v
so
).
Replacing above term in (4.160), we get the following.
A
= 3 [(v
sa
v
s0
)(v
sa
v
s0
) + (v
sb
v
s0
)(v
sb
v
s0
) + (v
sc
v
s0
)(v
sc
v
s0
)]
= 3[(v
sa
v
s0
)
2
+ (v
sb
v
s0
)
2
+ (v
sc
v
s0
)
2
]
= 3
j=a,b,c
(v
sj
v
s0
)
2
(4.161)
165
The above equation can also be written as,
|A
| = 3 [v
2
sa
+ v
2
sb
+ v
2
sc
+ 3 v
2
s0
2 v
s0
(v
sa
+ v
sb
+ v
sc
)]
= 3 [v
2
sa
+ v
2
sb
+ v
2
sc
+ 3 v
2
s0
6 v
2
s0
]
= 3 [v
2
sa
+ v
2
sb
+ v
2
sc
3v
2
s0
]
= 3
_
j=a,b,c
v
2
sj
3v
2
s0
_
(4.162)
Calculation of cofactors of A
We need to calculate a
c31
, a
c32
and a
c33
. These are computed as following.
a
c31
= [(v
sb
v
so
) + (v
sc
v
sa
) (v
sa
v
so
) + (v
sb
v
sc
)]
= [(v
sb
v
sa
) (v
sa
+ v
sb
2 v
sc
)]
= [(v
sb
v
sa
) (v
sa
+ v
sb
+ v
sc
3 v
sc
)]
= [(v
sb
v
sa
) (3 v
s0
3 v
sc
)]
= [v
sab
3 (v
sc
v
s0
)]
Similarly,
a
c32
= [(v
sb
v
so
) + (v
sc
v
sa
) (v
sc
v
so
) + (v
sa
v
sb
)]
= [(v
sb
v
sc
) + (v
sc
+ v
sb
2 v
sa
)]
= [(v
sb
v
sc
) + (v
sa
+ v
sb
+ v
sc
3 v
sa
)]
= [(v
sb
v
sc
) + (3 v
s0
3 v
sa
)]
= [v
sbc
3(v
sa
v
s0
)]
and
a
c33
= [(v
sa
v
so
) + (v
sb
v
sc
) (v
sc
v
so
) + (v
sa
v
sb
)]
= [(v
sa
v
sc
) (v
sa
+ v
sc
2 v
sb
)]
= [(v
sa
v
sc
) (v
sa
+ v
sb
+ v
sc
3 v
sb
)]
= [(v
sa
v
sc
) (3 v
s0
3 v
sb
)]
= [v
sca
3(v
sb
v
s0
)]
Therefore, the solution of the equation is given by,
_
_
i
lab
i
fab
i
lbc
i
fbc
i
lca
i
fca
_
_
=
1
A
_
_
a
c11
a
c12
a
c13
a
c21
a
c22
a
c23
a
c31
a
c32
a
c33
_
_
T
_
_
0
0
P
lavg
_
_
=
1
A
_
_
a
c11
a
c21
a
c31
a
c12
a
c22
a
c32
a
c13
a
c23
a
c33
_
_
_
_
0
0
P
lavg
_
_
(4.163)
166
From the above equation and substituting the values of cofactors obtained above, we get the fol-
lowing.
i
lab
i
fab
=
a
c31
|A
|
P
lavg
=
[v
sab
3(v
sc
v
s0
)]
3
_
j=a,b,c
v
2
sj
3 v
2
s0
_ P
lavg
=
[v
sab
/3 (v
sc
v
s0
)]
j=a,b,c
v
2
sj
3 v
2
s0
P
lavg
From the above equation, the reference compensator current (i
fab
) can be given as follows.
i
fab
= i
lab
v
sab
/3 (v
sc
v
s0
)
j=a,b,c
v
2
sj
3 v
2
s0
P
lavg
(4.164)
Similarly,
i
fbc
= i
lbc
v
sbc
/3 (v
sa
v
s0
)
j=a,b,c
v
2
sj
3 v
2
s0
P
lavg
(4.165)
and
i
fca
= i
lca
v
sca
/3 (v
sb
v
s0
)
j=a,b,c
v
2
sj
3 v
2
s0
P
lavg
(4.166)
When the source power factor is unity, = 0, for balanced source voltages (fundamental) v
s0
= 0.
Substituting these values in above equations, we get,
i
fab
= i
lab
v
sab
3
j=a,b,c
v
2
sj
P
lavg
i
fbc
= i
lbc
v
sbc
3
j=a,b,c
v
2
sj
P
lavg
(4.167)
i
fca
= i
lca
v
sca
3
j=a,b,c
v
2
sj
P
lavg
Further it can be seen that,
v
2
sab
+ v
2
sbc
+ v
2
sca
= (v
sa
v
sb
)
2
+ (v
sb
v
sc
)
2
+ (v
sc
v
sa
)
2
= v
2
sa
+ v
2
sb
2v
sa
v
sb
+ v
2
sb
+ v
2
sc
2v
sb
v
sc
+ v
2
sc
+ v
2
sa
2v
sc
v
sa
= 2(v
2
sa
+ v
2
sb
+ v
2
sc
) (2v
sa
v
sb
+ 2v
sb
v
sc
+ 2v
sc
v
sa
)
= 3(v
2
sa
+ v
2
sb
+ v
2
sc
) (v
2
sa
+ v
2
sb
+ v
2
sc
+ 2v
sa
v
sb
+ 2v
sb
v
sc
+ 2v
sc
v
sa
)
= 3(v
2
sa
+ v
2
sb
+ v
2
sc
) (v
sa
+ v
sb
+ v
sc
)
2
= 3[(v
2
sa
+ v
2
sb
+ v
2
sc
) 3 v
2
s0
]
= 3
_
j=a,b,c
v
2
sj
3 v
2
s0
_
(4.168)
167
Replacing 3
_
j=a,b,c
v
2
sj
3 v
2
s0
_
in equations (4.164), (4.165) and (4.166), we get the following.
i
fab
= i
lab
v
sab
3 (v
sc
v
s0
)
(v
2
sab
+ v
2
sbc
+ v
2
sca
)
P
lavg
i
fbc
= i
lbc
v
sbc
3 (v
sa
v
s0
)
(v
2
sab
+ v
2
sbc
+ v
2
sca
)
P
lavg
(4.169)
i
fca
= i
lca
v
sca
3 (v
sb
v
s0
)
(v
2
sab
+ v
2
sbc
+ v
2
sca
)
P
lavg
For unity power factor and balanced source voltages (fundamental), the reference compensator
currents are given as following.
i
fab
= i
lab
v
sab
9 V
2
P
lavg
i
fbc
= i
lbc
v
sbc
9 V
2
P
lavg
(4.170)
i
fca
= i
lca
v
sca
9 V
2
P
lavg
Where V is the rms value of phase voltages.
References
[1] H. Akagi, Y. Kanazawa, and A. Nabae, Instantaneous reactive power compensators compris-
ing switching devices without energy storage components, IEEE Transactions on Industry
Applications, no. 3, pp. 625630, 1984.
[2] A. Ghosh and G. Ledwich, Load compensating DSTATCOM in weak ac systems, IEEE
Transactions on Power Delivery, vol. 18, no. 4, pp. 13021309, Oct. 2003.
[3] V. George and Mahesh K. Mishra, DSTATCOM topologies for three-phase high power appli-
cations, International Journal of Power Electronics, vol. 2, no. 2, pp. 107124, 2010.
[4] A. Ghosh and A. Joshi, A new approach to load balancing and power factor correction in
power distribution system, IEEE Transactions on Power Delivery, vol. 15, no. 1, pp. 417
422, 2000.
[5] L. S. Czarnecki, Budeanu and Fryze: Two frameworks for interpreting power properties of
circuits with nonsinusoidal voltages and currents, Electrical Engineering (Archiv fur Elek-
trotechnik), vol. 80, no. 6, pp. 359367, 1997.
168
You might also like
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesFrom EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNo ratings yet
- Base (Reference) PaperDocument7 pagesBase (Reference) Papermphaniteja2012No ratings yet
- Chapter 2Document41 pagesChapter 2Prem KumarNo ratings yet
- chp2 2Document7 pageschp2 2karen dejoNo ratings yet
- Section IV: Load Flow by Gauss-Seidel MethodDocument17 pagesSection IV: Load Flow by Gauss-Seidel Methodchetu16No ratings yet
- Unified Power Quality Conditioner (UPQC) : The Principle, Control and ApplicationDocument6 pagesUnified Power Quality Conditioner (UPQC) : The Principle, Control and ApplicationgametamilNo ratings yet
- Voltage Regulation of Alternator by Zero Power Factor MethodDocument6 pagesVoltage Regulation of Alternator by Zero Power Factor MethodsumanktrNo ratings yet
- EE301Topic35 PDFDocument9 pagesEE301Topic35 PDFNaren VmdNo ratings yet
- Note Chap4p PDFDocument26 pagesNote Chap4p PDFFarhan ZainuddinNo ratings yet
- Ee366 Chap 5 2Document28 pagesEe366 Chap 5 2Michael Adu-boahenNo ratings yet
- Design Current Controller 3-Phase Converter Unbalanced Input VoltageDocument7 pagesDesign Current Controller 3-Phase Converter Unbalanced Input Voltagekoko_zununNo ratings yet
- Chapter 5 Homework SolutionDocument16 pagesChapter 5 Homework SolutionözlemArtuk100% (5)
- Powers Ys 125Document19 pagesPowers Ys 125makroumNo ratings yet
- Three Phase AC Circuit FundamentalsDocument9 pagesThree Phase AC Circuit FundamentalsVikash TiwariNo ratings yet
- Solutions To Chapter 4 Problems: Problem 4.1Document59 pagesSolutions To Chapter 4 Problems: Problem 4.1Anonymous ZyDssAc7RcNo ratings yet
- Machine Simulation ModelsDocument22 pagesMachine Simulation ModelsAshwani RanaNo ratings yet
- Chap 4Document26 pagesChap 4Dinesh KurubaNo ratings yet
- 44 223 1 PBDocument7 pages44 223 1 PBThiru TrishNo ratings yet
- New Control Algorithms For Series and Shunt Three Phase FourDocument17 pagesNew Control Algorithms For Series and Shunt Three Phase Foursiva sanjayNo ratings yet
- Instantaneus Power TheoromDocument5 pagesInstantaneus Power TheoromAlok Bikash SadangiNo ratings yet
- Induction Motor Drive System Applications: B. M. B. R. E. R. Da Silva A. 119. N.Document6 pagesInduction Motor Drive System Applications: B. M. B. R. E. R. Da Silva A. 119. N.Scott MendozaNo ratings yet
- Lecture 2 - Power Transfer0Document9 pagesLecture 2 - Power Transfer012onn1eNo ratings yet
- Review of Basic Concepts - Professor J R Lucas 2.1 Single Phase PowerDocument9 pagesReview of Basic Concepts - Professor J R Lucas 2.1 Single Phase PowerNormanSulimaNo ratings yet
- Implementation of Single-Phase PQ Theory: Mehrdad Tarafdar Haque, and Toshifumi H eDocument5 pagesImplementation of Single-Phase PQ Theory: Mehrdad Tarafdar Haque, and Toshifumi H ehusamyesilNo ratings yet
- Unit Template-Or Pi Controller-Based Control Algorithm of DstatcomsDocument3 pagesUnit Template-Or Pi Controller-Based Control Algorithm of DstatcomsArvind SharmaNo ratings yet
- Chapter No: 04: Measurement of Power & Power Factor CorrectionDocument26 pagesChapter No: 04: Measurement of Power & Power Factor CorrectionChandrakant BhattarNo ratings yet
- Ee220 Expt1Document10 pagesEe220 Expt1pkn.11ee56No ratings yet
- International Journal of Engineering Research and DevelopmentDocument9 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- CYCLOCONVERTERDocument17 pagesCYCLOCONVERTERRachmat Guntur Dwi Putra100% (1)
- Chapter 3Document50 pagesChapter 3Sunitha MaryNo ratings yet
- Alternative Current Theory - EDocument12 pagesAlternative Current Theory - Ethinkiit100% (3)
- Simulation of Three-Phase Bridge Rectifier Using MATLAB/ SIMULINK For Harmonic MitigationDocument5 pagesSimulation of Three-Phase Bridge Rectifier Using MATLAB/ SIMULINK For Harmonic MitigationIJMERNo ratings yet
- Solution of Current in R-L-C Series Circuits: LessonDocument13 pagesSolution of Current in R-L-C Series Circuits: LessonPrafull BNo ratings yet
- Instantaneous Reactive Power Compensators Comprising Switching Devices Without Energy Storage ComponentsDocument6 pagesInstantaneous Reactive Power Compensators Comprising Switching Devices Without Energy Storage ComponentsHosung AhnNo ratings yet
- Electric Machines and Drives 259Document3 pagesElectric Machines and Drives 259Abhably AblablyNo ratings yet
- EEE255 Manual Part2Document5 pagesEEE255 Manual Part2Betül MalkoçNo ratings yet
- Cycloconverters: Fig.1 Block Diagram of A CycloconverterDocument17 pagesCycloconverters: Fig.1 Block Diagram of A Cycloconvertersagar jaiswal100% (3)
- Visualization and Investigation of Unified Power Flow Controller (UPFC) Non-Linearity in Power FlowDocument6 pagesVisualization and Investigation of Unified Power Flow Controller (UPFC) Non-Linearity in Power Flowamiteetumtech2013No ratings yet
- Haque2004 - A Control Strategy Based On Extended P-Q Theory Usable in Parallel Active FiltersDocument6 pagesHaque2004 - A Control Strategy Based On Extended P-Q Theory Usable in Parallel Active Filtersrakeshee2007No ratings yet
- Fundamentals of Power Systems PDFDocument13 pagesFundamentals of Power Systems PDFSurender ReddyNo ratings yet
- Gams PowerDocument8 pagesGams Powerkaren dejoNo ratings yet
- Simulation of Series Active Filter For Unbalanced Loads: Greatkalai - Sasi@yahoo - Co.inDocument6 pagesSimulation of Series Active Filter For Unbalanced Loads: Greatkalai - Sasi@yahoo - Co.inphuongnhooNo ratings yet
- EEC 249 Electric Circuit 2 THEORY - Unesco2Document10 pagesEEC 249 Electric Circuit 2 THEORY - Unesco2Luise Shadrach100% (1)
- Three Phase NetworksDocument12 pagesThree Phase NetworksA-Jay N. GalizaNo ratings yet
- DC Machine Example ProblemsDocument4 pagesDC Machine Example ProblemsFemi Prince0% (1)
- EE 204 The Root Mean Square (RMS) Value: F TDT F TDocument14 pagesEE 204 The Root Mean Square (RMS) Value: F TDT F TAhmad WilcoxNo ratings yet
- AC Analysis by MATLABDocument27 pagesAC Analysis by MATLABYaman SoudanNo ratings yet
- 3 Phase Circuits 1Document25 pages3 Phase Circuits 1ايهاب غزالةNo ratings yet
- 3 Phase Circuits 1Document25 pages3 Phase Circuits 1JohnLaboguinNo ratings yet
- Perun ItDocument32 pagesPerun ItAlcibiades MaytaNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Co DesignDocument18 pagesCo DesignPrem KumarNo ratings yet
- Using Arduino With Matlab and Simulink PDFDocument15 pagesUsing Arduino With Matlab and Simulink PDFPrem KumarNo ratings yet
- Conclusion: InferenceDocument4 pagesConclusion: InferencePrem KumarNo ratings yet
- 4 - Types of DC Chopper PDFDocument38 pages4 - Types of DC Chopper PDFPrem KumarNo ratings yet
- Cognitive Psychology PDFDocument30 pagesCognitive Psychology PDFPrem KumarNo ratings yet
- Speed Control of Brushless DC Motor: Three Phase Voltage Source InverterDocument1 pageSpeed Control of Brushless DC Motor: Three Phase Voltage Source InverterPrem KumarNo ratings yet
- Apparatus Required:-: Frequency Response of Parallel Resonance CircuitDocument3 pagesApparatus Required:-: Frequency Response of Parallel Resonance CircuitPrem KumarNo ratings yet
- CKT Mesh AnalysisDocument3 pagesCKT Mesh AnalysisPrem KumarNo ratings yet
- Resonant Frequency Andfrequency Response of A RLC Circuit: X X R ZDocument5 pagesResonant Frequency Andfrequency Response of A RLC Circuit: X X R ZPrem KumarNo ratings yet
- Name of The Component Range Type Quantity: Aim: Maximum Power TransferDocument3 pagesName of The Component Range Type Quantity: Aim: Maximum Power TransferPrem KumarNo ratings yet