You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- General Purchasing ProcedureDocument20 pagesGeneral Purchasing ProcedureHARIKRISHNAN VENUGOPALANNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Suzuki PresentationDocument30 pagesSuzuki PresentationGaurav KhandelwalNo ratings yet
- 6edigest A320Document44 pages6edigest A320Anurag BoseNo ratings yet
- 07 Caliber 2.4-1Document5 pages07 Caliber 2.4-1Vita Ly0% (1)
- DOTr Omnibus GuidelinesDocument30 pagesDOTr Omnibus GuidelinesRapplerNo ratings yet
- 8 Manual 2018 R1300G Cat-50 NJB00425 PDFDocument852 pages8 Manual 2018 R1300G Cat-50 NJB00425 PDFjhordy carhuas guillermoNo ratings yet
- Drive Light Vehicle Using Traffic RulesDocument43 pagesDrive Light Vehicle Using Traffic RulesTesda Ptc Malilipot86% (14)
- BS 873 - Traffic Cones and CylindersDocument14 pagesBS 873 - Traffic Cones and CylindersVicky MunienNo ratings yet
- Piston Pin Specifications for Audi, Austin, BMW, Bedford, and FordDocument71 pagesPiston Pin Specifications for Audi, Austin, BMW, Bedford, and FordErickNo ratings yet
- Interfacing High-Voltage Applications To Low-Power ControllersDocument8 pagesInterfacing High-Voltage Applications To Low-Power ControllersIr Mathan RajNo ratings yet
- Bfm3323-Power Electronics 11314Document5 pagesBfm3323-Power Electronics 11314Ir Mathan RajNo ratings yet
- Lab CO1: Fundamentals of Pressure, Viscosity: and Surface Tension of Fluids BMM 3521 Engineering Fluid MechanicsDocument21 pagesLab CO1: Fundamentals of Pressure, Viscosity: and Surface Tension of Fluids BMM 3521 Engineering Fluid MechanicsIr Mathan RajNo ratings yet
- 3 Values or World Views of Indian Civilization PDFDocument3 pages3 Values or World Views of Indian Civilization PDFIr Mathan Raj0% (1)
- Diesel Forklift CPCD 40-Cpcd45-Cpcd50-Cpcd55 deDocument4 pagesDiesel Forklift CPCD 40-Cpcd45-Cpcd50-Cpcd55 dedomisilva.leandroNo ratings yet
- United India Insurance Company LimitedDocument3 pagesUnited India Insurance Company Limitedsree digitals DigitalsNo ratings yet
- Merchant of Venice TranslationDocument3 pagesMerchant of Venice TranslationSharleneNo ratings yet
- Oic Grasp BrochureDocument8 pagesOic Grasp BrochureAbid HassaanNo ratings yet
- Ideal Turbofan Cycle: Total Thrust Is Generated by Both Cold and Hot Jets.Document25 pagesIdeal Turbofan Cycle: Total Thrust Is Generated by Both Cold and Hot Jets.Elakkiya KarthicNo ratings yet
- International Conference Concept Note V1Document2 pagesInternational Conference Concept Note V1Ankit PandeyNo ratings yet
- Technical Note - TN 039: 2016Document12 pagesTechnical Note - TN 039: 2016chaithan kumarNo ratings yet
- ZF 5055 NR2HDocument4 pagesZF 5055 NR2HJUNIOR OLIVONo ratings yet
- The 'X' Chronicles Newspaper - April / May 2011 - Special EditionDocument48 pagesThe 'X' Chronicles Newspaper - April / May 2011 - Special EditionRob McConnell100% (1)
- Operating Principles of Exhaust Air Injection SystemsDocument10 pagesOperating Principles of Exhaust Air Injection SystemsMoppie HofstedeNo ratings yet
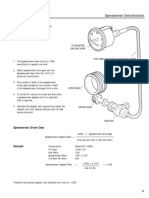
- Speedometer Determination Layout SchematicDocument10 pagesSpeedometer Determination Layout SchematicHILLNo ratings yet
- 3000 FFL Ops & IPL 11-06-08Document140 pages3000 FFL Ops & IPL 11-06-08namduong368No ratings yet
- HS 855 HD: Technical Data Hydraulic Crawler CraneDocument17 pagesHS 855 HD: Technical Data Hydraulic Crawler CranePol Peña QuispeNo ratings yet
- 3 PartsDocument27 pages3 PartsBappaditya AdhikaryNo ratings yet
- Disability (Need For Sensitization and Policy FrameworkDocument27 pagesDisability (Need For Sensitization and Policy FrameworkmaitreyaNo ratings yet
- User Manual 1.2: Parking Lot Sensor - PLSDocument184 pagesUser Manual 1.2: Parking Lot Sensor - PLSSandra BravoNo ratings yet
- Maintenance Schedule of Electrical Point Detector (EPD) : para No. 19.9.5Document1 pageMaintenance Schedule of Electrical Point Detector (EPD) : para No. 19.9.5Saurabh MoharirNo ratings yet
- Bonding Clip InstallationDocument4 pagesBonding Clip Installationtaarak143No ratings yet
- Fuse Panel Identification: 1994 Chevrolet Cavalier 1994 Chevrolet CavalierDocument4 pagesFuse Panel Identification: 1994 Chevrolet Cavalier 1994 Chevrolet CavalierMarcoNo ratings yet
- General Observations Suggestions For Improvement Best Part of AssignmentDocument9 pagesGeneral Observations Suggestions For Improvement Best Part of AssignmentCarlos Delgado NietoNo ratings yet
- Diagramas Harley Dyna 2011Document156 pagesDiagramas Harley Dyna 2011HerramientasDeMotocicletasRiveraNo ratings yet