You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tut2Problem TransformerDocument17 pagesTut2Problem TransformerFadly0% (3)
- Ac 1Document2 pagesAc 1Charina Pinlac100% (3)
- Emergency Generator Sizing and Motor Starting Analysis: Mukesh Kumar Kirar, Ganga AgnihotriDocument6 pagesEmergency Generator Sizing and Motor Starting Analysis: Mukesh Kumar Kirar, Ganga Agnihotribalwant_negi7520No ratings yet
- Predavanje 4a-2 - Strain GaugesDocument9 pagesPredavanje 4a-2 - Strain Gaugesmis38No ratings yet
- Guru Tegh Bahadur Institute of Technology Electrical ScienceDocument7 pagesGuru Tegh Bahadur Institute of Technology Electrical ScienceVinod KumarNo ratings yet
- 1.3. Tya-110 - 3Document12 pages1.3. Tya-110 - 3Reza AfarandNo ratings yet
- J. B. Ward - Equivalent Circuits For Power Flow StudiesDocument10 pagesJ. B. Ward - Equivalent Circuits For Power Flow StudiesfarhanhosseiniNo ratings yet
- Saini 2015Document6 pagesSaini 2015SaduMunisekharNo ratings yet
- DSAE0028998 f7nm80Document17 pagesDSAE0028998 f7nm80Especialista DexterNo ratings yet
- Electrical Circuits III PDFDocument42 pagesElectrical Circuits III PDFRolando Cruz50% (2)
- Advantages and Disadvantages of Series and Parallel CircuitsDocument19 pagesAdvantages and Disadvantages of Series and Parallel CircuitsArchiemedez BatanganNo ratings yet
- ELEN 4355: Electrical System Design For Buildings Prof. Rubén Flores FloresDocument27 pagesELEN 4355: Electrical System Design For Buildings Prof. Rubén Flores FloresXavier IzquierdoNo ratings yet
- Watlow Temperature and ProcessDocument24 pagesWatlow Temperature and ProcessEliasNo ratings yet
- Disclosure To Promote The Right To InformationDocument13 pagesDisclosure To Promote The Right To InformationSakthivel MurthyNo ratings yet
- Ac Network AnalysisDocument28 pagesAc Network AnalysistrizzmercadoNo ratings yet
- SEM600 1988 Resonant Mode ConverterTopologiesDocument14 pagesSEM600 1988 Resonant Mode ConverterTopologiesjuanNo ratings yet
- 1NK60Z PDFDocument14 pages1NK60Z PDFkimxoNo ratings yet
- STB19NF20Document27 pagesSTB19NF20quemasda quiensoyNo ratings yet
- Emergency LightingDocument33 pagesEmergency LightingFadhil Mohd100% (1)
- Asif ReportDocument6 pagesAsif ReportKolorob FilmNo ratings yet
- SMC Pneumatics IN-777 Air Servo CylinderDocument76 pagesSMC Pneumatics IN-777 Air Servo CylinderJuanPerezRooneyNo ratings yet
- CoilsDocument20 pagesCoilsAnup Kumar Gupta0% (1)
- PTC31, PTP31, PTP35 Manual Eng PDFDocument32 pagesPTC31, PTP31, PTP35 Manual Eng PDFkhangtrang83No ratings yet
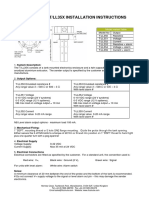
- T/Ll35X Installation Instructions: Model Variant TableDocument1 pageT/Ll35X Installation Instructions: Model Variant TableMilton FhaileNo ratings yet
- Infineon BTS740S2Document15 pagesInfineon BTS740S2dasho1No ratings yet
- Experiment: 4.2: Analyzing The Thevenin TheoremDocument8 pagesExperiment: 4.2: Analyzing The Thevenin Theoremفاطمة الرويليNo ratings yet
- Electrical Power Systems Wadhwa 8Document1 pageElectrical Power Systems Wadhwa 8ragupaNo ratings yet
- Vega DatasheetDocument6 pagesVega Datasheetvanhuong87No ratings yet
- Keithly 225 Current SourceDocument38 pagesKeithly 225 Current SourcerombernaNo ratings yet