You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Orientation Guide - 12 Week YearDocument4 pagesOrientation Guide - 12 Week YearSachin Manjalekar89% (9)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- MEP Method For CoordinationDocument35 pagesMEP Method For CoordinationGiang Lam100% (2)
- R 505 0128 Dismantling and Assembling Plant or Machinery Components To Replace Worn Damaged or Faulty Parts in The WorkplaceDocument4 pagesR 505 0128 Dismantling and Assembling Plant or Machinery Components To Replace Worn Damaged or Faulty Parts in The WorkplaceGiang LamNo ratings yet
- MEP CoordinationDocument42 pagesMEP CoordinationGiang LamNo ratings yet
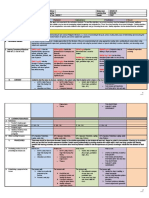
- DLL English q1 Week 7docxDocument5 pagesDLL English q1 Week 7docxVince Rayos CailingNo ratings yet
- KINESIOTHERAPHYDocument40 pagesKINESIOTHERAPHYJeyarajasekar TtrNo ratings yet
- BIM-lean Construction-A Case StudyDocument10 pagesBIM-lean Construction-A Case StudyGiang LamNo ratings yet
- Arcadis Insights Mar 2019 - DFMADocument5 pagesArcadis Insights Mar 2019 - DFMAGiang LamNo ratings yet
- Coteccons ProfileDocument49 pagesCoteccons ProfileGiang LamNo ratings yet
- Specific Registration Requirements For Mechanical & Electrical Workhead (Me)Document5 pagesSpecific Registration Requirements For Mechanical & Electrical Workhead (Me)Giang LamNo ratings yet
- Singh Et Al. 2018 - Implementation of Mass Customization For Mep Layout Design To Reduce Manufacturing Cost in One-Off ProjectsDocument10 pagesSingh Et Al. 2018 - Implementation of Mass Customization For Mep Layout Design To Reduce Manufacturing Cost in One-Off ProjectsGiang LamNo ratings yet
- Finishing Sequence: Trade: PlasteringDocument1 pageFinishing Sequence: Trade: PlasteringGiang LamNo ratings yet
- Plug-and-Play Solutions For Energy-Efficiency Deep Renovation of European Building StockDocument5 pagesPlug-and-Play Solutions For Energy-Efficiency Deep Renovation of European Building StockGiang LamNo ratings yet
- Fan Input Power Calculation Made Easy: Example 1 - Direct Drive MotorDocument7 pagesFan Input Power Calculation Made Easy: Example 1 - Direct Drive MotorGiang LamNo ratings yet
- LV MT/MT Series Datasheet: Technical DataDocument2 pagesLV MT/MT Series Datasheet: Technical DataGiang LamNo ratings yet
- Smart Logger 3000 ADocument1 pageSmart Logger 3000 AGiang LamNo ratings yet
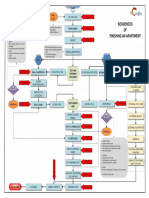
- Quy Trinh Hoan Thien Can HoDocument1 pageQuy Trinh Hoan Thien Can HoGiang LamNo ratings yet
- Quy Trinh Tran Thach CaoDocument1 pageQuy Trinh Tran Thach CaoGiang LamNo ratings yet
- Robust Self-Tuning MTPA Algorithm For IPMSM Drives 2008Document6 pagesRobust Self-Tuning MTPA Algorithm For IPMSM Drives 2008Giang LamNo ratings yet
- Bai Tap He Thong CCDDocument12 pagesBai Tap He Thong CCDGiang LamNo ratings yet
- Literature ReviewDocument6 pagesLiterature Reviewapi-609322356No ratings yet
- Actividad Entregable 2 - RoutinesDocument3 pagesActividad Entregable 2 - RoutinesAnggie ApoloNo ratings yet
- HS 2nd Yr Assamese Syllabus 2016Document1 pageHS 2nd Yr Assamese Syllabus 2016Principal Universal AcademyNo ratings yet
- School Culture and Its Relationship With Teacher LeadershipDocument15 pagesSchool Culture and Its Relationship With Teacher LeadershipCarmela BorjayNo ratings yet
- PSY 3410 Autism Spectrum Disorders & Intellectual DisabilityDocument26 pagesPSY 3410 Autism Spectrum Disorders & Intellectual Disabilityncastro1319No ratings yet
- The Abington Journal 02-01-2012Document20 pagesThe Abington Journal 02-01-2012The Times LeaderNo ratings yet
- TestAS-Economic-2017 (Second Edition)Document16 pagesTestAS-Economic-2017 (Second Edition)Thanh VuNo ratings yet
- Lesson Plan Year 2 KSSRDocument3 pagesLesson Plan Year 2 KSSRSandy NicoLine0% (1)
- Daily Lesson Plan Year 5 Wawasan: Classroom Based AssessmentDocument2 pagesDaily Lesson Plan Year 5 Wawasan: Classroom Based Assessmentstella stephenNo ratings yet
- Critical Thinking Tactics For Nurses 3rd Edition Ebook PDFDocument61 pagesCritical Thinking Tactics For Nurses 3rd Edition Ebook PDFbarbara.yohe1000100% (44)
- Final Draft1Document210 pagesFinal Draft1Ram KumarNo ratings yet
- Saumya Shandilya: Work ExperienceDocument3 pagesSaumya Shandilya: Work Experiencevegaciy144No ratings yet
- B01029 Chapter 0 IntroductionDocument6 pagesB01029 Chapter 0 IntroductionThanh TrúcNo ratings yet
- Pavan Kumar ResumeDocument3 pagesPavan Kumar ResumeThirumalamohan KotaNo ratings yet
- Cumberland Youth Football Registration 2021Document3 pagesCumberland Youth Football Registration 2021api-293704297No ratings yet
- Steven Hernandez 10125 Milan El Paso, Texas, 79924 (915) 216-2523Document3 pagesSteven Hernandez 10125 Milan El Paso, Texas, 79924 (915) 216-2523api-324394663No ratings yet
- Health Design Thinking An Innovative Approach in PDocument6 pagesHealth Design Thinking An Innovative Approach in PElena AlnaderNo ratings yet
- Roya Abdoly ReferenceDocument1 pageRoya Abdoly Referenceapi-412016589No ratings yet
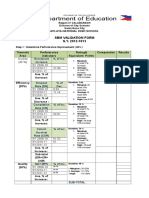
- SBM VAlidation FormDocument2 pagesSBM VAlidation FormamerizaNo ratings yet
- ELE Deliverable D2 18 Report On State of LT in 2030Document56 pagesELE Deliverable D2 18 Report On State of LT in 2030Manuel BediaNo ratings yet
- NURS FPX 6011 Assessment 1 Evidence-Based Patient-Centered Concept MapDocument4 pagesNURS FPX 6011 Assessment 1 Evidence-Based Patient-Centered Concept MapCarolyn HarkerNo ratings yet
- School ID Region VIII Division District School Name School Year SectionDocument16 pagesSchool ID Region VIII Division District School Name School Year SectionJaharaJaneDacunganKatingNo ratings yet
- Solutionbank C1: Edexcel Modular Mathematics For AS and A-LevelDocument62 pagesSolutionbank C1: Edexcel Modular Mathematics For AS and A-LevelMomina ZidanNo ratings yet
- Round and RoundDocument3 pagesRound and Roundapi-533593265No ratings yet
- CHCECE037 Student Assessment-Spontaneous Intentional Teaching OpportunitiesDocument3 pagesCHCECE037 Student Assessment-Spontaneous Intentional Teaching Opportunitiesmagesty tamayoNo ratings yet
- Learning Process: CS/CMPE 537 - Neural NetworksDocument34 pagesLearning Process: CS/CMPE 537 - Neural Networkskunalbhatia15No ratings yet
- Regular ResumeDocument3 pagesRegular Resumeapi-275908631No ratings yet