You might also like
- Vasiliev OV Electricity and Unusual FeaturesDocument93 pagesVasiliev OV Electricity and Unusual FeaturesPopescu George BogdanNo ratings yet
- Stan Meyers Vic Circuit Rebuild GuideDocument60 pagesStan Meyers Vic Circuit Rebuild Guidepic2007100% (1)
- LJ Create: Analog and Digital Motor ControlDocument7 pagesLJ Create: Analog and Digital Motor ControlMahmud Hasan SumonNo ratings yet
- Testatika Princip PDFDocument0 pagesTestatika Princip PDFmanos306No ratings yet
- The Anti-Lenz-Effekt: Acceleration-EffectDocument2 pagesThe Anti-Lenz-Effekt: Acceleration-EffectRoman CorralesNo ratings yet
- 3DR DIY Quad Build Manual VADocument23 pages3DR DIY Quad Build Manual VAHoàngCôngAnhNo ratings yet
- Perendev Style Magnetic MotorDocument5 pagesPerendev Style Magnetic Motorbrazselva100% (2)
- Radiant Charger - With SchematicsDocument13 pagesRadiant Charger - With SchematicsEpicBlue100% (4)
- QEG Opensourced Build Manual 25-Mar-15Document76 pagesQEG Opensourced Build Manual 25-Mar-15Naicheval RobitaiNo ratings yet
- Mueller Experiments Kromrey Brandt Tesla Bedini!!!!!Document30 pagesMueller Experiments Kromrey Brandt Tesla Bedini!!!!!d4nk4rNo ratings yet
- Magnetic AmplifierDocument4 pagesMagnetic AmplifierShobha SainiNo ratings yet
- No. 390,721, Patented 00 T. 9, 1888.: Best Avalable Cop N, TeslaDocument4 pagesNo. 390,721, Patented 00 T. 9, 1888.: Best Avalable Cop N, TeslaAtharva Deshpande100% (1)
- Making A Flynn Motor - Circuit Diagram Attached: Parallel Path Magnetic TheoryDocument5 pagesMaking A Flynn Motor - Circuit Diagram Attached: Parallel Path Magnetic Theorydewidewi76No ratings yet
- Permanent Magnet MotorsDocument36 pagesPermanent Magnet MotorskkarthiksNo ratings yet
- Thomas Engel's Magnet MotorDocument81 pagesThomas Engel's Magnet Motoradela2012No ratings yet
- Mylow Magnet Motor Plans v2-1Document18 pagesMylow Magnet Motor Plans v2-1hawk789No ratings yet
- MAGNETIC AMPLIFIER-finalDocument20 pagesMAGNETIC AMPLIFIER-finalDharmendraChaurasia100% (1)
- BLDC ControlDocument16 pagesBLDC ControlSaurabh DashNo ratings yet
- Permanent Magnet MotorDocument4 pagesPermanent Magnet MotorGerardo BautistaNo ratings yet
- Power Generation by Foot Step Method - Rack and PinionDocument13 pagesPower Generation by Foot Step Method - Rack and Pinionprem53100% (2)
- US568176 - TeslaDocument4 pagesUS568176 - TesladaveklodavekloNo ratings yet
- Paul Mali - Magnetic Amplifiers - Principles and ApplicationsDocument110 pagesPaul Mali - Magnetic Amplifiers - Principles and ApplicationsJuri Loktionov100% (1)
- The Richard Clem EngineDocument24 pagesThe Richard Clem EngineDimple Soni100% (1)
- Modelling and Simuation of BLDC Motor in MATLAB GUIDocument5 pagesModelling and Simuation of BLDC Motor in MATLAB GUIvishiwizardNo ratings yet
- Motionless Electromagnetic Meg NewDocument20 pagesMotionless Electromagnetic Meg NewDeepak Kumar Verma100% (1)
- Axial Flux Permanent Magnet Disc Machines - A ReviewDocument12 pagesAxial Flux Permanent Magnet Disc Machines - A ReviewMostafa Ahmadi100% (3)
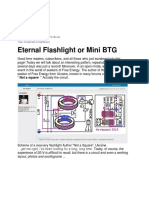
- Ukraine Ethernal Lantern Perpetum MobileDocument9 pagesUkraine Ethernal Lantern Perpetum MobileMihai Daniel100% (1)
- D14 Updated 24 Dec 2007 PDFDocument14 pagesD14 Updated 24 Dec 2007 PDFVinayak SanghaniNo ratings yet
- Basic Construction and Working of A DC GeneratorDocument12 pagesBasic Construction and Working of A DC GeneratorMaheedhar ReddyNo ratings yet
- Magnetic AmplifierDocument2 pagesMagnetic Amplifierrintarejoy100% (1)
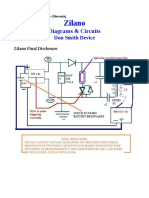
- Zilano Important Older DS Posts AbridgedDocument147 pagesZilano Important Older DS Posts Abridgedscolem26100% (1)
- Dony WatssDocument49 pagesDony WatssvbugaianNo ratings yet
- Gunderson Solid State Electric Generator Patent US7830065Document9 pagesGunderson Solid State Electric Generator Patent US7830065Dan Beeson100% (2)
- Make The Joule Thief Circuit For Power A CFLDocument7 pagesMake The Joule Thief Circuit For Power A CFLRifi HadiNo ratings yet
- Twin Loop Treasure Seeker: Robert and David CroneDocument5 pagesTwin Loop Treasure Seeker: Robert and David CronesafdsfdNo ratings yet
- E. v. Gray Analysis by William S. AlekDocument1 pageE. v. Gray Analysis by William S. Alekscribdsandu100% (1)
- The Tesla SwitchDocument8 pagesThe Tesla SwitchJan Groenewald100% (1)
- Permanent Magnet Synchronous Motor DrivesDocument19 pagesPermanent Magnet Synchronous Motor Driveskumar001450% (2)
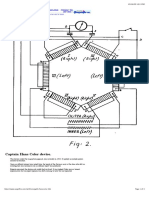
- The Inventions of CaptainDocument3 pagesThe Inventions of CaptainAngela0220No ratings yet
- Axial Flux MotorDocument7 pagesAxial Flux MotorMirant ParikhNo ratings yet
- Tesla Switch GuideDocument32 pagesTesla Switch GuideRagnarLothbrokNo ratings yet
- Switched Reluctance Motor PDFDocument79 pagesSwitched Reluctance Motor PDFHAMID SULIAMANNo ratings yet
- Joule Thief CircuitDocument8 pagesJoule Thief CircuitTariq PatelNo ratings yet
- QEG - Test and Measurement ReportDocument17 pagesQEG - Test and Measurement ReportFreeEnergyWorldNo ratings yet
- Tesla Coil Project: V1 Cprobe 15p CP 9.3p L1 19.5m R1 1megDocument9 pagesTesla Coil Project: V1 Cprobe 15p CP 9.3p L1 19.5m R1 1megNISHANT KumarNo ratings yet
- Hokei MINATO Magnetic MotorDocument31 pagesHokei MINATO Magnetic Motormorsee100% (4)
- A New Unity Power Factor Quasi-Resonant Induction Heater PDFDocument225 pagesA New Unity Power Factor Quasi-Resonant Induction Heater PDFŽarko Dačević100% (1)
- MEG TheoryDocument17 pagesMEG Theorybill gavenda100% (1)
- A Practical Guide To Free Energy' Devices: 4. Energy Can Be Taken From "Permanent" MagnetsDocument21 pagesA Practical Guide To Free Energy' Devices: 4. Energy Can Be Taken From "Permanent" MagnetsRamon GarciaNo ratings yet
- Dynamo Electric Machinery-Construction Design and Operation 1910 PDFDocument364 pagesDynamo Electric Machinery-Construction Design and Operation 1910 PDFTiffany Grace F. Sumayao100% (1)
- US4675615 - Magnetic AmplifierDocument8 pagesUS4675615 - Magnetic AmplifierDra_en_Ku_mi__5308100% (1)
- Fan Charger Relay ChargerDocument4 pagesFan Charger Relay ChargerluzenskiNo ratings yet
- Muammer Yildiz - Over-Unity Homopolar Electrical Generator - Patent, ArticlesDocument29 pagesMuammer Yildiz - Over-Unity Homopolar Electrical Generator - Patent, ArticlesMohd FakhriNo ratings yet
- PX7203-Special Electrical Machines PDFDocument11 pagesPX7203-Special Electrical Machines PDFvaishnavisriNo ratings yet
- Zilano Diagrams and Circuits For Study of Zilano Posts1Document29 pagesZilano Diagrams and Circuits For Study of Zilano Posts1Sebastian Gonczarek100% (1)
- !!!! Technisch Sehr Gute Bucking Coil BeschreibungDocument2 pages!!!! Technisch Sehr Gute Bucking Coil BeschreibungIchbins100% (1)
- Permanent Magnet MotorDocument15 pagesPermanent Magnet MotorLord BaronNo ratings yet
- Alternator-Regulator Troubleshooting PDFDocument2 pagesAlternator-Regulator Troubleshooting PDFAcara Adum100% (1)
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Induction Coils - How To Make, Use, And Repair Them: Including Ruhmkorff, Tesla, And Medical Coils, Roentgen, Radiography, Wireless Telegraphy, And Practical Information On Primary And Secodary BatteryFrom EverandInduction Coils - How To Make, Use, And Repair Them: Including Ruhmkorff, Tesla, And Medical Coils, Roentgen, Radiography, Wireless Telegraphy, And Practical Information On Primary And Secodary BatteryRating: 5 out of 5 stars5/5 (2)
- AutotransformerDocument23 pagesAutotransformerSalman AkhtarNo ratings yet
- EM-III Subjective I Sem 2017-18Document6 pagesEM-III Subjective I Sem 2017-18Saravanan T YNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorLasantha Abeykoon67% (3)
- ALCE Instrument Transformers 2012 CD R01Document20 pagesALCE Instrument Transformers 2012 CD R01Lý Chính ĐạoNo ratings yet
- Transformer: Application of TransformersDocument13 pagesTransformer: Application of TransformersbacklogNo ratings yet
- Motor STAR - DELTA Starter Working Principle Instrumentation ToolsDocument3 pagesMotor STAR - DELTA Starter Working Principle Instrumentation ToolsTEUKUNo ratings yet
- Electrical Machines DC MotorDocument5 pagesElectrical Machines DC MotorKitkay NivramNo ratings yet
- DC MachineDocument124 pagesDC MachinejoebrislinNo ratings yet
- Chapter 4 - Synchronous MachinesDocument43 pagesChapter 4 - Synchronous Machinesabout the pointNo ratings yet
- Power System Protection Lectures - Instrument TransformersDocument56 pagesPower System Protection Lectures - Instrument TransformersavishekNo ratings yet
- DC Motors BookDocument21 pagesDC Motors BookMeesixNo ratings yet
- Machines 2Document6 pagesMachines 2Kieth Daryl CampanerNo ratings yet
- U-VI Three Phase Induction MotorDocument51 pagesU-VI Three Phase Induction MotorNakshNo ratings yet
- DC Motor WorksheetDocument4 pagesDC Motor WorksheetThomas AgegnehuNo ratings yet
- Short Circuit SimulatorDocument4 pagesShort Circuit SimulatorMichael DarmstaedterNo ratings yet
- 4th Year Project - 588512328Document47 pages4th Year Project - 588512328ናዝራዊ አማኑኤል ጌታቸውNo ratings yet
- Vdocuments - MX - Catalogo Maquinas Despiezables de Feedback PDFDocument4 pagesVdocuments - MX - Catalogo Maquinas Despiezables de Feedback PDFHelder NascimentoNo ratings yet
- Differential Protection of Generator or AlternatorDocument3 pagesDifferential Protection of Generator or Alternatorsiddhant103No ratings yet
- Em 1Document2 pagesEm 1Kurmaiah SagarNo ratings yet
- Motion Control Systems - Lec 1Document31 pagesMotion Control Systems - Lec 1Hau PhamNo ratings yet
- DC MachineDocument60 pagesDC MachineNebyou DanielNo ratings yet
- Chapter 3.4 Physics PresentationDocument14 pagesChapter 3.4 Physics PresentationNor DianaNo ratings yet
- Elec UPDADocument219 pagesElec UPDASujith PsNo ratings yet
- E2063 Teknologi Elektrik 2 UNIT0Document11 pagesE2063 Teknologi Elektrik 2 UNIT0dbu2952No ratings yet
- Novel Direct Torque Control Based On Space VectorDocument16 pagesNovel Direct Torque Control Based On Space VectorPalaparthy Venkata MaheshNo ratings yet
- Basic Electrical Engineering - Eee-101Document2 pagesBasic Electrical Engineering - Eee-101kohli kingNo ratings yet
- Magnetic CircuitDocument4 pagesMagnetic CircuitNizam MjNo ratings yet
- Industrial Applications of Brushless ServomotorDocument10 pagesIndustrial Applications of Brushless ServomotorSteve VagliettiNo ratings yet
- Speed Control of 3phase Induction MotorDocument3 pagesSpeed Control of 3phase Induction MotorSiddhant ShatàpathyNo ratings yet
- Stepper Motor ControlDocument5 pagesStepper Motor ControlKumar R Ranjan86% (7)