Professional Documents
Culture Documents
Damech Mokhtari
Uploaded by
elmerkhOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Damech Mokhtari
Uploaded by
elmerkhCopyright:
Available Formats
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE
SCIENTIFIQUE
Universit Kasdi MerbahOuargla
Facult des Sciences et Technologies et Sciences de la Matire
Dpartement de gnie lectrique
PROJ ET DE FIN CYCLE
En vue dobtention du
Diplme de Master en Gnie Electrique
Filire : Gnie lectrique Spcialit : Electrotechnique Industrielle
Prsent par :
M
r
. DAMECH ZAKARIA M
r
. MOKHTARI BRAHIM
Thme
Prsent devant le jury compos de :
Nom et Prnom Grade Qualit Universit
M
r
. MANSEUR ABD EL GHANI MAB
Prsident UKMO
M
r
. BOUAKAZ OUAHID MAA
Examinateur UKMO
M
r
. RACHEDI M
ed
YACINE MAA
Examinateur UKMO
M
r
. KHETTACHE LAID MAA
Rapporteur UKMO
Anne universitaire : 2011/2012
MODELISATION ET SIMULATION DUNE GENERATRICE
ASYNCHRONE EN SATURATION
Nous remercions, en premier lieu, notre Dieu le plus Puissant qui a bien
voulu nous donner la force et le courage Pour effectuer
Le prsent travail.
Nous exprimons nos profondes gratitudes nos parents pour leurs
Encouragements, leur soutien et pour les sacrifices
Quils ont endur.
En second lieu, nous tenons remercier notre encadreur "M
r
. Khettache
Laid " pour son srieux, sa comptence
et ses orientations.
Nos sincres remerciements aux messieurs les membres du jury pour
l'honneur qu'ils nous font en participant
au jugement de ce travail.
Nous remercions vont aussi tous les enseignants du dpartement Gnie
lctrique qui ont contribu notre formation.
Enfin nous tenons exprimer notre reconnaissance tous nos amis et
collges pour tout le soutien moral et matriel
MOKHTARI Brahim
DAMECH Zakaria
Sommaire
Introduction gnrale ................................................................................................ 1
I .1.Introduction .......................................................................................................... 2
I .2.Historique .............................................................................................................. 2
I .3.Symbole ................................................................................................................... 4
I .4 .Constitution .......................................................................................................... 4
I .4.1. Stator ................................................................................................................ 5
I .4. 2.Rotor ................................................................................................................ 5
I .5.Utilisation................................................................................................................ 6
I .5.1.Moteur asynchrone ........................................................................................ 6
I .5.2.Gnrateur asynchrone ................................................................................ 6
I .6. Principe de fonctionnement dune machine asynchrone .................. 6
I .6.1. Glissement dune machine asynchrone .................................................. 8
I .6.2.Dmarrage ....................................................................................................... 9
Chapitre I: Gnralits sur les machines asynchrones
Sommaire
Sommaire
I .6.2.1. Dmarrage sous tension rduite ............................................................ 9
I .6.2.1. 1. Dmarrage toile-triangle................................................................... 9
I .6.2.1.2. Dmarrage par autotransformateur ................................................... 9
I .6.2.1.3.Dmarrage rsistif ............................................................................... 10
I .6.2.2.Dmarrage tension nominale ............................................................ 10
I .6.2.2.1.Dmarrage rotorique........................................................................... 10
I .6.3.Freinage ........................................................................................................... 10
I .6.3.1 . Freinage hyper synchrone ................................................................... 10
I .6.3.2 . Arrt par injection de courant continu ............................................ 11
I .6.3.3 . Arrt contre-courant ....................................................................... 11
I .6.3.4 . Freinage mcanique par lectro-frein ............................................. 11
I .7.Les avantages et les inconvnients ............................................................. 11
I .7.1.Avantages ....................................................................................................... 11
I .7.2.Inconvnients ................................................................................................ 12
I .8.Conclusion ........................................................................................................... 12
II.1.Introduction ........................................................................................................ 13
II.2. Modlisation de la gnratrice en fonctionnement linaire ........ 13
II.2.1. Hypothses .................................................................................................. 13
II.2.2. Modle mathmatique de la machine asynchrone linaire ............. 14
II.2.2.1. Equations gnrales de la machine........................................................ 14
Chapitre II: Modlisation de la gnratrice en fonctionnement linaire
Sommaire
II.2.2.2. Modle diphas de la machine asynchrone en fonctionnement
linaire .......................................................................................................... 16
II.2.2.3 Choix du rfrentiel ................................................................................. 18
II.2.2.4. Equations de Puissance et de Couple ................................................... 18
II.3. Gnratrice asynchrone cage.................................................................. 20
II.4. Auto-amorage de la gnratrice asynchrone vide ....................... 20
II.5. Modlisation de lauto-amorage vide................................................ 26
II.5.1.Simulation de la gnratrice lauto-amorage vide ...................... 26
II.5.1.1. Influence de la capacit ............................................................... ........27
II.5.1.1.1. Rsultats de simulation ...................................................................... 27
II.5.1.1.2. Interprtation des rsultats .............................................................. 28
II.5.1.1.3. Rsultats de simulation ...................................................................... 28
II.5.1.1.4. Interprtation des rsultats .............................................................. 29
II.6. Conclusion ....................................................................................................... 29
Introduction ............................................................................................. 30
III.1. Modlisation mathmatique de la gnratrice asynchrone .............. 30
Chapitre III: Modlisation de la gnratrice en saturation
Sommaire
III.1.1. Hypothses simplificatrices................................................................ 30
III.1.2. Fonctionnement vide ............................................................................. 31
III.1.3. Equations de la gnratrice dans le repre U,V .............................. 32
III.1.4. Reprsentation schmatique des flux ................................................ 33
III.2.Mise sous forme dtat du modle biphas......................................... 39
III.3.Auto-amorage de la gnratrice en rgime satur vide............ 40
III.3.1.Simulation de la gnratrice lauto-amorage vide .................... 42
III.3.1.1.Rsultats de simulation ........................................................................... 42
III.3.1.2.Interprtation des rsultats .................................................................. 43
III.4.Prsentation de la gnratrice asynchrone en charge R ............. 44
III.4.1.Simulation de la gnratrice lauto-amorage en charge R .......... 45
III.4.1.1. Rsultats de simulation ......................................................................... 46
III.4.1.2.Interprtation des rsultats................................................................... 46
III.5.Prsentation de lauto-amorage en charge (RL) ........................... 47
III.5.1.Simulation de la gnratrice lauto-amorage en charge RL ...... 48
III.5.1.1.Rsultats de simulation ......................................................................... 49
III.5.1.2.Interprtation des rsultats .................................................................. 50
Sommaire
III.5.2.Influence de la vitesse .............................................................................. 51
III.5.2.1 .Rsultats de simulation ........................................................................ 51
III.5.2.2 .Interprtation des rsultats ................................................................. 52
III.6. Conclusion ....................................................................................................... 52
Conclusion gnrale ................................................................................................ 53
Annexe
Tableau de figure
Bibliographique
Introduction gnrale
Introduction Gnrale
Universit Kasdi Merbah Ouargla 1
Introduction Gnrale:
Une machine asynchrone est une machine possdant strictement le mme stator
quune machine synchrone. Un ensemble de trois bobinages parcourus par des courants
triphass induisent un champ tournant statorique de vitesse de rotation en tours par minute
= 60. / , p tant le nombre de paires de ples du bobinage.
La diffrence notable avec le moteur synchrone rside dans le rotor. Celui-ci est
constitu de conducteurs (des bobinages ou carrment des barres mtalliques) disposs le
long du rotor et court-circuits.
Lorsque le champ tournant balaye ces conducteurs, il induit des courants qui
entrent en interaction avec le champ et permettent un couple moteur de se crer. Le rotor
se met alors tourner et se stabilise une vitesse toujours lgrement infrieure la
vitesse de synchronisme.
Il est impossible pour le rotor de tourner la vitesse de synchronisme puisquil
serait alors baign dans un champ fixe, et donc parcouru par un courant nul.
En labsence de courant, le couple serait nul, et la machine dclrerait. La lgre
diffrence de vitesse justifie le terme de glissement du rotor par rapport au champ
tournant.
Dans ce contexte le but de ce mmoire est l'tude du comportement de la
gnratrice Asynchrone cage lors des rgimes de fonctionnement transitoires ou
permanents et en deux modes de fonctionnements (linaire, satur).
Pour ce faire, cette tude portera essentiellement sur la modlisat ion et la
simulation assiste par MATLAB.
CHAPITRE I :
Gnralits sur les machines asynchrones
CHAPITRE I :
Gnralits sur les machines asynchrones
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 2
I .1 .Introduction:
Une machine asynchrone est une machine dont la rotation de l'arbre est diffrente de la vitesse
de rotation du champ tournant.
La machine courant alternatif pour laquelle la vitesse de machine qui nous intresse
dans ce chapitre est plus prcisment une machine induction.
Il existe en effet thoriquement d'autres types de machines asynchrones, une machine
induction est une machine asynchrone dont le circuit magntique est associ deux ou plus de
deux circuit lectriques se dplaant l'un par rapport l'autre et dans lequel l'nergie est
transfre de la partie fixe la partie mobile, ou inversement, par induction lectromagntique.
Cependant, la seule machine asynchrone qui ait une importance pratique est la machine
induction.
I .2.Historique :
La paternit de la machine asynchrone est controverse. Elle pourrait tre attribue trois
inventeurs : en 1887, Nikola Tesla dpose un brevet sur la machine asynchrone [1], puis en mai
de l'anne suivante cinq autres brevets.
Pendant la mme priode Galileo Ferraris publie des traits sur les machines tournantes,
avec une exprimentation en 1885, puis une thorie sur le moteur asynchrone en avril 1888[2].
En 1889, Michail Ossipowitsch Doliwo-Dobrowolski, lectricien allemand d'origine russe,
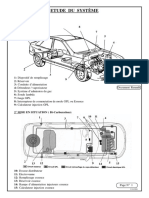
Figure (I. 1) : Machine asynchrone avec puissance de 8KW
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 3
invente le premier moteur asynchrone courant triphas cage d'cureuil qui sera construit
industriellement partir de 1891[3].
Du fait de sa simplicit de construction, d'utilisation et d'entretien, de sa robustesse et son
faible prix de revient, la machine asynchrone est aujourd'hui trs couramment utilise comme
moteur dans une gamme de puissance allant de quelques centaines de watts plusieurs milliers
de kilowatts.
Quand la machine asynchrone est alimente par un rseau frquence fixe, il est difficile de
faire varier sa vitesse. En outre, au dmarrage, le couple est faible et le courant appel est trs
lev.
Deux solutions historiques ont rsolu ce dernier problme : le rotor encoches profondes
et le rotor double cage dcouvert en 1912 par Paul Boucherot. Grce aux progrs de
l'lectronique de puissance, l'alimentation par un onduleur frquence variable permet
maintenant de dmarrer la machine convenablement et de la faire fonctionner avec une vitesse
rglable dans une large plage. C'est pourquoi il est utilis pour la motorisation des derniers TGV
ainsi que des nouveaux mtros parisiens [4].
Le stator, 4 paires de
ples.
Les deux borniers de
raccordement.
Intrieur d'une machine
asynchrone diphase, R.
Alioth et Cie, no 1042, vers
1893
Le rotor, cage constitue
de bobinages de cuivre
en court-circuit. Les
encoches sont
lgrement inclines.
Figure (I.2) :Les lements de la machine asynchrone
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 4
I .3.Symbole:
La machine asynchrone peut tre reprsente par son symbole normalis gnrale qui prcise si
elle fonctionne en moteur (Figure. I.3-a) ou en gnrateur (Figure. I.3-b).Le symbole peut tre
apport des prcisions sur la nature de la machine:
I .4 .Constitution:
Lorganisation dune machine asynchrone triphase est montre sur la figure (I.4), Elle est
constitue dune partie fixe (stator) et dune partie tournante (rotor) magntiquement couples.
a)
b)
Figure (I. 5) : Coupe d'un moteur triphas
Figure ( I. 3) : Symbole gnrale d'un moteur et gnerateur asynchrone triphas
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 5
I .4.1. Stator :
Le stator contient un bobinage triphas constitu de trois enroulements identiques
correctement disposs le long dun entrefer de telle sorte que leurs axes forment des angles de
120 entre eux
Figure (I. 5): Stator d'un moteur asynchrone triphas
I .4. 2.Rotor :
Le rotor est ralis de deux faons :
a) Rotor cage : il est constitu par un empilement de tles perces de trous, dans les
quelles, on loge des barres conductrices. Ces barres sont court-circuites leurs extrmits par
des couronnes conductrices, ce qui constitue une vritable cage dcureuil.
b) Rotor bobin : au lieu de loger des barres dans le fer du rotor, on peut disposer des
conducteurs dans les encoches et raliser un bobinage polyphas (gnralement triphas)
similaire celui du stator.
a) b)
Figure ( I. 6) :Type de rotor
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 6
I .5.Utilisation:
I .5.1.Moteur asynchrone:
Le moteur asynchrone est le moteur industriel par excellence , les moteurs asynchrones
ont, pour leur grande majorit, un rotor cage.
Les progrs accomplis ces dernires annes dans l'alimentation et la commande des
machines n'ont fait que rduire la part des moteurs asynchrone rotor bobin par rapport leurs
homologues cage d'cureuil.
I .5.2.Gnrateur asynchrone:
Le gnrateur asynchrone est beaucoup plus rare que l'alternateur ,mais on le trouve dans
quelques applications de puissance limite comme les microcentrales hydrauliques ,il occupe
surtout la plus grande part du march des oliennes , le plus souvent avec des machines cage
d'cureuil pour les puissances modestes ,mais aussi avec des machines rotor bobin pour les
installations plus importantes
I .6. Principe de fonctionnement dune machine asynchrone:
Les courants statoriques crent un champ magntique tournant dans le stator. La
frquence de rotation de ce champ est impose par la frquence des courants statoriques, cest--
dire que sa vitesse de rotation est proportionnelle la frquence de l'alimentation lectrique, la
vitesse de ce champ tournant est appele vitesse de synchronisme.
L'enroulement au rotor est donc soumis des variations de flux (du champ
magntique).
Une force lectromotrice induite apparat qui cre des courants rotorique. Ces courants
sont responsables de l'apparition d'un couple qui tend mettre le rotor en mouvement afin
de s'opposer la variation de flux : loi de Lenz.
Le rotor se met donc tourner pour tenter de suivre le champ statorique, [2].
Sur les moteurs asynchrones triphass, le champ tournant est produit par trois bobinages
fixes gomtriquement dcals de 120, et parcourus par des courants alternatifs prsentant le
mme dcalage lectrique, les trois champs alternatifs quils produisent se composent pour
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 7
former un champ tournant damplitude constante comme il est prsent dans cette figure ( I. 7),
[5].
La machine est dite asynchrone car elle est dans l'impossibilit, sans la prsence d'un
entranement extrieur, d'atteindre la mme vitesse que le champ statorique. En effet, dans ce
cas, les courants s'annulent de mme que le couple qu'ils produisent et la machine n'est plus
entrane.
La diffrence de vitesse entre le rotor et le champ statorique est appele vitesse de
glissement, lors qu'il est entran au-del de la vitesse de synchronisme, la machine fonctionne
en gnrateur alternatif mais son stator doit tre forcment reli au rseau car lui seul peut crer
le champ magntique ncessaire pour faire apparatre les courants rotorique un fonctionnement
en gnrateur alternatif autonome est toutefois possible l'aide de condensateurs
connects sur le stator, condition qu'il existe un champ magntique rmanent.
On retrouve cette mme problmatique lorsqu'on cherche faire fonctionner des
machines courant continu excitation srie en gnratrice. dfaut, des dispositifs
d'lectronique de puissance et une batterie permettent d'amorcer le fonctionnement en
gnratrice autonome.
Cette solution est mise en uvre pour produire de l'lectricit l'aide d'oliennes dans
des sites isols.
Figure ( I. 7) : Principe de fonctionnement dun moteur asynchrone
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 8
I .6.1. Glissement dune machine asynchrone :
On dsigne par n
s
la vitesse de synchronisme, c'est--dire la frquence de rotation du
champ statorique dans la machine.
On dsigne par n la vitesse de rotation de la machine.
La frquence de synchronisme est toujours un sous multiple entier de la frquence du secteur
en 50 Hz c'est un sous multiple de 3000 tr/min soit : 3000 ; 1500 ; 1000 ; 750 ; etc.
en 60 Hz c'est un sous multiple de 3600 tr/min, soit : 3600 ; 1800 ; 1200 ; 900 ; etc. Soit
p le nombre de paires de ples de la machine et f la frquence de l'alimentation. On a:
s= 60f/P (1.1)
Le glissement correspond la diffrence de vitesse entre le rotor et le champ
statorique exprime sous la forme d'un pourcentage de la vitesse de synchronisme.
g =
(1.2)
La vitesse du champ tournant par rapport au rotor est
s
m
et la pulsation
r
des
courant rotorique est alors :
r
= p(
s
m
)
soit :
Le courant rotorique de pulsation
r
crent une tension magntique tournante dentrefer
dont la vitesse par rapport au rotor est
r
=
r
p
Cest -dire
s
par rapport au stator la pulsation de champs tournante est
Le glissement est toujours faible, de l'ordre de quelques pour-cent : de 2 % pour les
machines les plus grosses 6 ou 7 % pour les petites machines triphases, il peut atteindre 10
% pour les petites machines monophases.
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 9
I .6.2.Dmarrage :
Lors d'un dmarrage d'une machine asynchrone, le courant peut atteindre de 4 8 fois le
courant nominal de la machine. Si l'application utilise un variateur ou un dmarreur, c'est ce
dernier qui se chargera d'adapter les tensions appliques la machine afin de limiter ce courant.
En l'absence de variateur de vitesse, il existe plusieurs mthodes permettant de limiter le courant
de dmarrage. Elles ont t dveloppes avant l'apparition de l'lectronique de puissance mais
sont encore utilises de nos jours dans les installations anciennes ou par mesure d'conomie pour
des applications ne ncessitant pas de variateur en dehors du dmarrage.
I .6.2.1. Dmarrage sous tension rduite :
Plusieurs dispositifs permettent de rduire la tension aux bornes des enroulements du
stator pendant la dure du dmarrage du moteur ce qui est un moyen de limiter l'intensit du
courant de dmarrage. L'inconvnient est que le couple moteur est galement diminu et que cela
augmente la dure avant laquelle la machine atteint le rgime permanent.
I .6.2.1. 1. Dmarrage toile-triangle:
Lors d'un dmarrage toile-triangle, la machine est d'abord connecte au rseau avec un
couplage toile, puis une fois dmarre, on passe sur couplage triangle. Le fait de dmarrer avec
un couplage toile permet de diviser par la racine carre de trois la tension applique. Ainsi, le
courant maximal absorb est trois fois plus faible que lors d'un dmarrage directement avec un
couplage triangle. Le couple de dmarrage est lui aussi trois fois plus faible que lors d'un
dmarrage en triangle. La surintensit lors du passage toile-triangle est infrieure au courant
d'appel d'un dmarrage effectu directement en triangle.
Ralise simplement l'aide de contacteurs, cette mthode de dmarrage est trs conomique.
I .6.2.1.2. Dmarrage par autotransformateur :
Dans ce mode de dmarrage, le stator de la machine asynchrone est reli un
autotransformateur qui permet d'effectuer un dmarrage sous tension variable. La tension est
progressivement augmente, l'intensit du courant ne dpassant pas la valeur maximale dsire.
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 10
I .6.2.1.3.Dmarrage rsistif :
Lors d'un dmarrage rsistif, on insre des rsistances en srie avec les enroulements
statoriques ce qui a pour effet de limiter la tension leurs bornes. Une fois le dmarrage effectu,
on court-circuite ces rsistances. Cette opration peut tre effectue progressivement par un
oprateur l'aide de rhostats de dmarrage.
I .6.2.2.Dmarrage tension nominale :
I .6.2.2.1.Dmarrage rotorique :
Lors d'un dmarrage rotorique, des rsistances de puissance sont insres en srie avec
les enroulements du rotor.
Ce type de dmarrage permet d'obtenir un fort couple de dmarrage avec des courants de
dmarrage rduits mais il ne peut tre mis en uvre qu'avec des machines rotor bobin muni de
contacts glissants (bagues et balais) permettant les connexions lectriques des enroulements
rotoriques.
Ces machines sont d'un prix de revient plus important que leurs homologues dits
cage d'cureuil .
I .6.3.Freinage :
On distingue plusieurs types de freinage :
Arrt libre : (mise hors tension du stator)
Arrt contrl : Tension statorique progressivement passe tension nulle
I .6.3.1 . Freinage hyper synchrone :
Lorsque la vitesse du rotor est suprieure la vitesse du champ tournant, le moteur freine.
Coupl un variateur de frquence qui diminue progressivement la vitesse du moteur on peut
arrter un moteur. Le couple de freinage est faible : la courbe du couple en fonction de la vitesse
pour diffrentes valeurs du glissement montre que le couple rsistant n'est pas trs important
pour un glissement compris entre 0 et -1. Cette mthode n'est donc pas trs efficace pour freiner
rapidement une machine asynchrone.
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 11
I .6.3.2 . Arrt par injection de courant continu :
L'alimentation en courant continu du stator cre un champ fixe dans la machine qui s'oppose
au mouvement. C'est la mthode la plus efficace pour freiner la machine, mais les contraintes en
courant sont galement trs svres. Le contrle de l'intensit du courant continu permet de
contrler le freinage.
I .6.3.3 . Arrt contre-courant :
Le principe consiste inverser deux phases pendant un court instant. Ceci est donc
quivalent un freinage hyper synchrone, mais frquence fixe. Le couple rsistant est donc
faible et le courant appel est galement trs important (de l'ordre de 10 12 fois l'intensit
nominale). La consquence en est que les enroulements du moteur risquent un sur-
chauffement : on peut prvoir des rsistances supplmentaires afin de diminuer l'intensit.
Enfin, avec cette mthode, le couple dclrateur reste ngatif mme lorsque la vitesse est gale
0 tr/min, il faut donc prvoir de couper l'alimentation quand la vitesse est nulle (temporisation,
contact centrifuge), sinon la rotation s'inverse.
I .6.3.4 . Freinage mcanique par lectro-frein :
Ce systme est constitu d'un frein disque solidaire de l'arbre de la machine asynchrone
et dont les mchoires initialement serres hors tension sont commandes par un lectroaimant.
Aprs alimentation de l'lectroaimant, les mchoires se desserrent laissant la rotation libre. La
coupure de l'alimentation provoque le freinage. Ce dispositif aussi appel frein manque de
courant est souvent prvu comme dispositif d'arrt durgence.
I .7.Les avantages et les inconvnients :
I .7.1.Avantages :
Il ya plusieurs avantages dans le moteur asynchrone comme [9] :
- Structure simple.
- Robuste et facile construire.
- Utilis dans la puissance moyenne et levs.
- Reli directement aux rseaux industriels tension et frquence .
Chapitre I Gnralits sur les machines asynchrones
Universit Kasdi Merbah Ouargla 12
- Il tourne vitesse variable diffrante de la vitesse synchrone.
- Il peut tre varie la vitesse de rotation.
- Il est utilise pour la ralisation de la quasi-totalit de lentranement vitesse.
I .7.2.Inconvnients :
- Parmis les inconvnients de la machine asynchrone [9] :
- Le couple de dmarrage trs lev que les couples nominales.
- La vitesse dpend de la charge.
- Variation de vitesse (ncessit dun variateur de vitesse).
- La structure dynamique est fortement nom linaire et lexistence dun fort couplage.
I .8.Conclusion :
Dans ce chapitre, nous avons mis en vidence une introduction sur les machines asynchrones
qui prsentent la construction simple de cette machine, ainsi que les diffrents modes de
fonctionnement (moteur, gnratrice), en plus les mthodes de dmarrage sont prsente, ainsi
que ces avantages et inconvnients.
Finalement on dduit que le moteur asynchrone est le plus utilis dans le domaine des
entrainements rgls vitesse de rotation variable, Il est souvent employ dans lindustrie.
CHAPITRE II :
Modlisation de la gnratrice
En
Fonctionnement linaire
CHAPITRE II :
Modlisation de la gnratrice
En
Fonctionnement linaire
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
13 Universit Kasdi Merbah Ouargla
II.1.Introduction:
La modlisation de la machine asynchrone nest pas ngliger pour une identification
paramtrique efficace, de ce fait un soin particulier est apporter a ce travail qui sera le gage
de rsultants prcis et cohrent.
La modlisation de la machine asynchrone peut tre, la plus complique de toutes les
autres machines tournantes.
Dans ce chapitre une modlisation de gnratrice asynchrone t fait en mode
linaire, pour un fonctionnement vide et en charge (rsistive, inductive).
II.2. Modlisation de la gnratrice en fonctionnement linaire :
II.2.1. Hypothses:
La machine asynchrone, avec la rpartition de ses enroulements et sa gomtrie, est trs
complexe pour se prter une analyse tenant compte de sa configuration exacte ,il
est alors ncessaire d'adopter des hypothses simplificatrices.
On suppose les circuits magntiques non saturs, et suffisamment feuillets
pour que les pertes fer soient ngligeables. Les relations entre les flux et les
courants sont d'ordres linaires.
On considre une densit de courant uniforme dans la section des conducteurs
lmentaires, L'effet de peau est donc nglig.
Le phnomne hystrsis et les courants de Foucault sont ngligs.
Les enroulements statoriques et rotoriques sont symtriques et la f..m. est
distribue sinusodalement le long de la priphrie des deux armatures.
On ne tient compte que du premier harmonique d'espace de distribution
de force magntomotrice de chaque phase du stator et du rotor.
L'entrefer est d'paisseur uniforme (constant), les inductances propres sont
constantes, les inductances mutuelles sont des fonctions sinusodales de l'angle
entre les axes des enroulements rotoriques et statoriques.
On considre que la machine fonctionne en rgime quilibr.
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
14 Universit Kasdi Merbah Ouargla
II.2.2. Modle mathmatique de la machine asynchrone linaire :
II.2.2.1. Equations gnrales de la machine :
Les quations gnrales de la machine asynchrone cage d'cureuil dans un repre
triphas s'crivent sous forme matricielle :
s a b c
=
s a b c
+
s a b c
rABC
= 0 =
r ABC
+
r ABC
(2.1)
, , , , .
Les flux s'expriment en fonction des courants en faisant intervenir les diffrentes
inductances :
;
: .
s a b c
=
s a b c
+
r ABC
= 0 =
s a b c
+
(2.2)
Avec :
.
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
15 Universit Kasdi Merbah Ouargla
s a b c
=
;
rABC
=
s a b c
=
;
r ABC
=
s a b c
=
rABC
=
s
=
;
r
=
M
s r
=
m
cos cos +
2
3
cos
2
3
cos
2
3
cos cos +
2
3
cos +
2
3
cos
2
3
cos
;
R
s
=
0 0
0
0
0 0
; R
r
=
0 0
0
0
0 0
;
Figure ( II. 1) : Reprsentation de la machine asynchrone cage d'cureuil
as, bs, cs : phases du stator ; Ar , Br ,Cr: phases du rotor.
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
16 Universit Kasdi Merbah Ouargla
II.2.2.2. Modle diphas de la machine asynchrone en fonctionnement linaire :
La machine asynchrone est une machine fortement couple, sa reprsentation
dans le systme triphas est par consquent particulirement complexe.
Pour mieux reprsenter le comportement dune machine asynchrone, il est ncessaire de
faire appel un modle prcis et suffisamment simple. Le modle diphas (d, q) donn par
la transformation de Park est alors utilis [2]. Le nouveau modle est obtenu en multipliant
les quations des flux et des tensions par la matrice de Park qui s'exprime par :
P( ) =
2
3
cos cos
2
3
cos +
2
3
sin( ) sin
2
3
sin +
2
3
1
2
1
2
1
2
(2. 3)
Avec de la figure ( II .2) pour une transformation au
stator ou l'angle entre d et Ar pour une transformation au rotor.
Les grandeurs (courants, tensions et flux) transformes, du systme diphas sont gales la
matrice de Park multiplie par les grandeurs du systme triphas
[
sdq
] = P
s a b c
[
rdq
] = P
rA B C
(2. 4)
[
sdq
] = P(
)
s a b c
[
rdq
] = P(
)
rABC
(2. 5)
[
sdq
] = P(
)
s a b c
[
rdq
] = P(
)
rABC
(2. 6)
Ainsi, en multipliant les systmes d'quations (2-1) et (2-2) par la matrice de Park, on obtient :
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
17 Universit Kasdi Merbah Ouargla
V
ds
= r
s
I
ds
+
d
dt
(
ds
)
a
qs
V
qs
= r
s
I
qs
+
d
dt
(
qs
) +
a
ds
(2. 7)
= 0 =
(
dr
) (
= 0 =
(
qr
) +(
(2. 8)
sdq
= L
s
I
sdq
+M
sr
I
rdq
rdq
= M
sr
I
sdq
+L
r
I
rdq
(2. 9)
Avec :
=
: dsigne la vitesse angulaire lectrique du repre d, q.
Dans le nouveau repre, la machine est reprsente par la figure (II. 2.) ci-dessous.
Figure ( II. 2) : Reprsentation de la machine dans le repre diphas
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
18 Universit Kasdi Merbah Ouargla
II.2.2.3 Choix du rfrentiel:
Il est plus intressant d'crire les quations dans un rfrentiel li soit au stator, soit au
rotor, ou au champ tournant, selon les objectifs de l'application.
Dans chacun de ces nouveaux rfrentiels, les quations de la machine deviennent plus
simples que dans le rfrentiel quelconque.
Nous reprsentons ci-dessous Figure (II. 3) les schmas quivalents suivant les deux axes
pour un rfrentiel quelconque de vitesse
a
Figure( II. 3) : Schma quivalent en rgime dynamique de la machine asynchrone
dans un rfrentiel arbitraire l'axe d
Le choix du rfrentiel se fait en fonction de la valeur de
a
:
a
= 0 correspond au rfrentiel stationnaire.
a
=
r
:correspond au rfrentiel li au rotor.
a
=
s
: correspond au rfrentiel li au champ tournant.
II.2.2.4. Equations de Puissance et de Couple :
Selon Park, la puissance lectrique statorique instantane de la machine s'crit :
P(t)=
3
2
(
ds
ds
+
qs
qs
) (2. 10)
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
19 Universit Kasdi Merbah Ouargla
Dans un rfrentiel li au champ tournant, en remplaant V
ds
et V
qs
par leurs
valeurs, la relation prcdente multiplie par dt devient :
dW
es
=
3
2
ds
2
+
qs
2
dt +
3
2
(d
ds
ds
+
qs
qs
)+
3
2
s
(
ds
qs
qs
ds
)dt (2. 11)
L'nergie lectrique fournie au stator pendant le temps d t se dcompose ainsi en trois
termes :
Le premier reprsente l'nergie perdue par effet Joule au stator ;
Le second reprsente la variation d'nergie magntique statorique ;
Le troisime reprsente l'nergie d
transfre du stator au rotor travers
lentrefer par lintermdiaire du champ tournant.
Avec :
d
=
3
2
s
(
ds
qs
qs
ds
)dt
=
3
2
dr
2
+
qr
2
dt +
3
2
(d
dr
dr
+
qr
qr
)+
3
2
r
(
ds
qs
qs
ds
)dt (2. 12)
L'nergie d
transitant travers l'entrefer est donc compose de trois termes
L'nergie perdue par effet Joule au rotor ;
La variation d'nergie magntique rotorique ;
L'nergie dW
mec
transformable en nergie mcanique.
Le couple lectromagntique dvelopp par le champ tournant s'obtient en divisant
le troisime terme de l'quation (2-11) par
s
dt
=
3
2
(
ds
qs
qs
ds
) (2. 13)
Le couple mcanique s'obtient en divisant le dernier terme de (2-12) par
r
dt :
=
3
2
ds
qs
qs
ds
=
+f
(2. 14)
En explicitant les flux statoriques et rotoriques en fonction des inductances, on vrifie que :
=
3
2
(
qs
ds
I
ds
qs
) (2. 15)
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
20 Universit Kasdi Merbah Ouargla
Cette relation trs importante met en vidence le fait que le couple rsulte de
l'interaction des composantes des courants statoriques et rotoriques en quadrature [11],[12].
II.3. Gnratrice asynchrone cage: [13],[14],[20].
La gnratrice asynchrone cage (GAS) nengendre pas sa propre nergie dexcitation
contrairement lalternateur. Pour cette raison il faudra lui apporter cette nergie et stabiliser
sa tension de sortie et sa frquence. Ainsi, on connecte aux bornes du stator une batterie de
condensateurs correctement dimensionne et on fait tourner le rotor de la machine la vitesse
ncessaire. La prsence dun flux magntique rmanent dans le fer du rotor est indispensable
pour lauto-amorage de la gnratrice.
La figure (II. 4) reprsente le schma de la GAS auto-amore
GAS M
C
C
H
R
G
E
Figure ( II. 4) : Schma reprsentatif de la GAS auto-amore
II.4. Auto-amorage de la gnratrice asynchrone vide:
Lauto-amorage de la gnratrice ne se produit quen prsence du condensateur. Ce
dernier forme avec la gnratrice un systme oscillant dont les quations drivent du schma
de la figure (II. 5). Il faut noter que lorsque la machine nest pas sature, la caractristique de
magntisation m (im ) est une droite de pente sensiblement gale la mutuelle M , [15].
Figure ( II. 5) : Schma quivalent lors de lauto-amorage vide
U
0
r
I
s
b)
r
E
C
+n
s
-n
s
0
g
d
C
r
+g
s
-g
s
2-
g
C
i
C
d
(g)
(n)
b)
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
21 Universit Kasdi Merbah Ouargla
Figure ( II. 6) :Fonctionnement en gnratrice auto-amore
Le schma de la figure (II. 5) est quivalent une gnratrice dimpdance ZG
dbitant sur une impdance Zc figure( II. 6) ;
O:
ZC - limpdance du condensateur;
ZG - limpdance quivalente de la gnratrice.
Daprs la figure (II. 6) nous avons:
ZC.Is = -ZG Is ; (2. 16)
Do:
Zres = ZC + ZG = 0 (2. 17)
Or:
) (
'
'
r
r
r
r
s s
G
l M j
g
r
l j
g
r
M j
l j r Z
o
o
o
e
e e
e
' + +
|
|
.
|
\
|
' +
+ + = ; (2. 18)
C
j
Z
c
; (2. 19)
On a:
M L l
s s
; (2. 20)
M L l
r r
; (2. 21)
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
22 Universit Kasdi Merbah Ouargla
En remplaant dans (2. 18) on aura:
| |
r
r
'
r
'
r '
r
'
r
s s
G
L j
g
r
) M L ( j
g
r
M j L j
g
r
) M L ( j r
Z
' e +
' e + e +
e + e +
=
(2. 22)
En introduisant le coefficient de dispersion , tel que
'
r s
2
L L M 1 , on obtient:
r
r
'
r
'
s s r r s
2
r
'
s
G
L j
g
r
g
r
L r L j L L
g
r
r
Z
' e +
|
|
.
|
\
|
+ ' e + ' o e
= ; (2. 23)
Le fonctionnement stable de la gnratrice asynchrone auto-amore sera assur si
lquation (2. 13) est satisfaite; cest--dire si limpdance rsultante Z
res
0 est telle que:
0 ) Z Re(
res
; (2. 24)
0 ) Z Im(
res
; (2. 25)
Le glissement g introduit dans (2. 14) est dfini comme:
r
g ; (2. 26)
os
Dsigne la pulsation des grandeurs statoriques en rgime dauto-amorage et
r
la
pulsation mcanique.
Le phnomne damorage correspond au passage dun tat dquilibre instable
(dbut de lamorage) un tat dquilibre stable (point de fonctionnement final) dfini par
les conditions (2. 24) et (2. 25). Par consquent, lamorage ne peut se produire que si
lnergie fournie au systme par lorgane dentranement est suprieure lnergie
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
23 Universit Kasdi Merbah Ouargla
consomme dans les rsistances
r
'
r et
s
r ; la puissance fournie au systme correspond la
puissance dissipe dans la rsistance
g
g 1
r
r
'
.
La condition damorage peut, ds lors, sexprimer sous une forme simple:
0 ) Re( res Z
(2. 27)
La partie relle est gale :
2
r
2
2
r
'
r
'
r s
2
s
res
L
g
r
) 1 (
g
r
L L .
r ) Z Re(
' e +
|
|
.
|
\
|
o ' e
+ = ; (2. 28)
La figure ci-dessous reprsente la variation de ) Z Re(
res en fonction de g.
Cette fonction a pour asymptote
s
r et ne peut tre ngative que pour des valeurs de g
comprises entre
1
g et
2
g . La condition damorage sexprime par consquent par:
1 2
g g g
Figure ( II. 7) :Dtermination du domaine damorage
Pour des valeurs trs faibles de g:
g .
r
) 1 ( L L .
r ) Z Re(
r
'
r s
2
s
res
; (2. 29)
Do: pour 0 ) Z Re(
res
:
1
g
0
) Z Re(
res
2
g
g
zone
damorage
s
r
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
24 Universit Kasdi Merbah Ouargla
) 1 ( L L .
r r
g
r s
2
r
'
s
1
; (2.30)
La machine tourne pratiquement sa vitesse de synchronisme (g
1
0)
Pour des valeurs de g importantes :
g
r
r
L
) 1 (
g
r
L
r ) Z Re(
r
'
s
r
r
'
s
s
res
; (2. 31)
Do:
r s
s
r
'
2
L r
) 1 ( L r
g
; (2. 32)
Connaissant les glissements limites g
1
et g
2
, on en dduit les valeurs extrmes de la
capacit C, qui dfinissent le domaine dans lequel lamorage peut avoir lieu.
La gnratrice asynchrone ne recevant dautre nergie ractive que celle provenant de
la capacit C.
De (2. 25) on peut tirer la valeur de la capacit qui doit tre branche:
0
L
g
r
L
g
r
L
C
1
) Z Im(
2
r
2
2
r
'
2
r
2
2
r
'
s
res
=
' e +
|
|
.
|
\
|
(
(
' e o +
|
|
.
|
\
|
e
+
e
= ; (2. 33)
Pour 0 g g
1
, on a
r 1
,do
0 L
C
1
r s
r
; (2. 34)
s
2
r
1
L
1
C
; (2. 35)
Cette capacit correspond la rsonance avec linductance propre statorique
s
L .
Comme 0 g g
1
, la machine gnre une frquence nominale en tournant pratiquement la
vitesse de synchronisme.
Pour 1
r
r
g g
s
r
'
2
, on a:
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
25 Universit Kasdi Merbah Ouargla
2 r 2 2 r
2 ) g 1 ( ; (2. 36)
Et 0 L
C
1
2 s
2 2
; (2. 37)
La capacit
2
C correspond la rsonance avec linductance
s
L qui nest autre que
linductance de court-circuit de la machine. Cette solution est rejeter car pour gnrer la
frquence nominale, la machine doit tourner pratiquement au double de sa vitesse de
synchronisme.
Lorsquun moteur asynchrone est compens en pleine charge au moyen dune capacit
C de faon ce que le facteur de puissance rsultant soit gal lunit, il y a un risque
dauto-amorage lorsque le moteur est dclench en restant connect aux condensateurs. En
effet, la capacit C est telle que la pulsation de rsonance
0
est largement infrieure
n
:
sn
cn
n
s
0
X
X
C L
1
; (2. 38)
Avec les ractances
cn
X et
sn
X calcules la frquence nominale:
n
cn
C
1
X
;
n s sn
L X
II.5. Modlisation de lauto-amorage vide:
Figure ( II. 8) : Diagramme vectoriel de la gnratrice auto-amore
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
26 Universit Kasdi Merbah Ouargla
Pour simuler lauto-amorage il suffit de rsoudre le systme dquations de tension en tenant
compte de la tension aux bornes du condensateur. Le systme dquations final, dans un rfrentiel li
au stator, est exprim comme suit :
r s s s s s
i
dt
d
M i
dt
d
L i r U ;
r s s s s s
i
dt
d
M i
dt
d
L i r U ; (2. 39)
) i M i L ( i
dt
d
M i
dt
d
L i r 0
s r r r s r r r r
;
) i M i L ( i
dt
d
M i
dt
d
L i r 0
s r r r s r r r r
;
=
+ =
o | |
| o o
e
e
s coor s s
s coor s s
U i
C
U
dt
d
U i
C
U
dt
d
1
1
(2. 40)
Dans le systme les seconds termes de (2. 40) sont nuls puisque
coor
=0.
II.5.1 .Simulation de la gnratrice lauto-amorage vide :
Figure (II. 9) : Schma bloc de la gnratrice en mode Linaire vide
La rsolution numrique des systmes (2. 39) et (2. 40) donne, comme tension dauto-
amorage vide, lallure reprsente sur la figure (II. 10). Le courant de phase a lallure de la
figure (II. 11).
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
27 Universit Kasdi Merbah Ouargla
II.5.1.1 .Influence de la capacit :
Lvolution de la tension lorsque lexcitation ncessaire lauto-amorage varie par la
variation du condensateur. On constate que laugmentation et la diminution de la valeur de la
capacit influe sur le transitoire de la tension ; les courants statorique augmentent pour
2
.
1
s
L
C F, et diminuent pour
2
.
1
s
L
C F. Par contre cette variation n'a pas beaucoup
d'effet sur la frquence de la tension mais seulement la vitesse.
II.5.1.1.1. Rsultats de simulation:
pour :
2
.
1
s
L
C .
Figure ( II. 10) :Tension d'auto-amorage vide
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
temps (s)
U
a
s
(
v
)
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
28 Universit Kasdi Merbah Ouargla
Figure ( II. 11) : Courant statorique induit
II.5.1.1.2. Interprtation des rsultats:
On constate sur la figure (II. 10.) que la tension induite croit, indfiniment, de faon
exponentielle avec des oscillations entretenues. Cela est d essentiellement lhypothse de
non saturation du circuit magntique de la machine.
La forme du courant de la gnratrice figure ( II. 11.) est similaire celle de la tension
et le courant atteint rapidement des valeurs critiques.
II.5.1.1.3. Rsultats de simulation:
Pour
2
s
. L
1
C
Figure ( II. 12) : Courant statorique induit
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
x 10
-3
temps (s)
I
a
s
(
A
)
Chapitre II Modlisation de la gnratrice en fonctionnement linaire
29 Universit Kasdi Merbah Ouargla
Figure ( II. 13) :Tension d'auto-amorage
II.5.1.1.4. Interprtation des rsultats:
Si la valeur du condensateur est telle que
2
.
1
s
L
C , la tension, aprs une tentative
l'oscillation, dcrot rapidement pour atteindre une valeur trs petite, figure ( II. 13.)
La forme du courant de figure ( II. 12.) est similaire celle de la tension, le courant atteint
rapidement des valeurs critiques.
Par consquent, l'auto-amorage n'a lieu que pour une certaine valeur du
condensateur telle que
2
.
1
s
L
C , qui correspond la rsonance, et une vitesse de rotation
donne.
II.6. Conclusion :
Ce chapitre nous a permis d'tablir un modle mathmatique de gnratrice
asynchrone travers des quations simples l'aide de la transformation de Park. Celles-ci
nous faciliteront par la suite ltablissement des diffrents modles que nous allons utiliser
dans la simulation.
Il est vident que l'accroissement non limit des grandeurs de la gnratrice n'est pas
rel car dans le cas chant la gnratrice sera dtrior immdiatement par l'accroissement
du courant.
Pour se placer dans le cas rel, il faudrait tenir compte de l'effet de la saturation du circuit
magntique de la machine
CHAPITRE III :
Modlisation de la gnratrice
En
Rgime saturation
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 30
Introduction:
Le modle linaire de la gnratrice asynchrone nest donc pas rel et le
fonctionnement correct de la gnratrice est redevable la prise en compte de la saturation du
circuit magntique de la machine.
En rgime de saturation, les flux et les courants ne sont plus proportionnels. La
caractristique de magntisation se compose en plus de la partie linaire, dune partie dite
coude et une autre dite de saturation. Cest cette partie qui va limiter les grandeurs de la
gnratrice.[16]
III.1.Modlisation mathmatique de la gnratrice asynchrone :
III.1.1.Hypothses simplificatrices :
La machine lectrique tant un systme trs complexe, nous allons simplifier son tude
moyennant les hypothses simplificatrices suivantes :
Entrefer constant.
Effet des encoches nglig.
Distribution spatiale sinusodale des forces magntomotrices dentrefer.
Circuit magntique satur et permabilit constante.
Pertes ferromagntiques ngligeables.
Linfluence de leffet de peau et de lchauffement sur les caractristiques nest pas
prise en compte.
Parmi les consquences importantes de ces hypothses, on peut citer :
Ladditivit des flux.
La constance des inductances propres.
La loi de variation sinusodale des inductances mutuelles entre les enroulements
statoriques et rotoriques en fonction de langle lectrique de leurs axes magntiques.
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 31
III.1.2.Fonctionnement vide :
Lorigine de la FEM induite est similaire celle de lalternateur cest--dire
) , ( n f E . Entre la FEM E et le courant de magntisation il existe deux relations:
- ) (
m
I f E caractristique interne;
-
s c c c
I X I X E qui est une droite semblable la droite des inducteurs dans le cas
dun gnrateur shunt.
Le trac de ces deux caractristiques figure (III.1) montre que le point de
fonctionnement (rgime permanent) est en A ( point dintersection des deux courbes). A
chaque position du point A sur la courbe ) (
m
I f E correspond un certain nombre de
paramtres bien fixs ) , , , ( g C L
m s
.
La position du point A est lie la pente de la droite :
c
X
C
tg
1
) ( .
Lors de la variation de C, le point A se dplace sur la courbe ) (
m
I f E ; or, quand c
augmente, A vient en
A
et, cet effet, la tension augmente ; on peut aussi augmenter la
tension en maintenant C constant tout en augmentant la vitesse de rotation n; le point A
vient donc en A (courbe en pointill), figure ( III.1).
Il existe une valeur de C critique qui dsamorce la gnratrice telle que :
2
1
s
cr
L
C .
Pour cette valeur la pente
cr
cr
C
tg
1
) ( est tangente la caractristique interne.
Figure (III.1) : Caractristique de fonctionnement vide
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 32
III.1.3.Equations de la gnratrice dans le repre U,V [14].:
Rcrivons le systme dquations
sv coor su su s su
dt
d
i r U ;
su coor sv sv s sv
dt
d
i r U ;
v r r coor u r u r r
) (
dt
d
i r 0 ; (3.1)
ru r coor rv rv r
) (
dt
d
i r 0 ;
La figure (III.2) reprsente la schma quivalent de la GAS dans le rfrentiel de Park
gnralis.
Figure (III.2) : Schma quivalent de la GAS dans le rfrentiel de Park
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 33
Les expressions des flux sont donnes selon la figure (III.3);
Figure ( III.3) : Disposition des enroulements suivant les axes U, V [14].
u r
i . M
u s
i .
s
L
u s
;
sv
L
s
i
sv
M i
r v
. . ; (3.2)
u s
i . M
u r
i .
r
L
u r
;
v s
i . M
v r
i .
r
L
v r
III.1.4. Reprsentation schmatique des flux :
La figure (III.4) schmatise les flux qui se manifestent suivant les axes U,V
Figure (III.4) : Reprsentation schmatique des flux selon les axes U,V
V
su coor
U
r
L
L
r
M
M
sv
i
rv
i
su
i
coor
C
C
ru
i
s
L
s
L
v s coor
v s coor
(
) r
su coor
(
) r
ru
su
i
ru
U
i
s u
mu
r s v
V
mv
r v
v r
i
sv
i
sv
r s u
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 34
Avec:
mu
- le flux principal coupl avec les deux enroulements;
us
,
ur
- les flux de fuite des enroulements statorique et rotorique selon laxe U;
usr
- le flux mutuel entre le stator et le rotor.
Les inductances propres et mutuelles figurant dans les relations du systme (3.2) sont :
su
=
u
+
us
+
usr
=
s
sv
=
v
+
vs
+
vsr
=
s
ru
=
u
+
ur
+
usr
=
r
rv
=
v
+
vr
+
vsr
=
r
usr
=
u
+
usr
vsr
=
v
+
vsr
(3.3)
Prenons
vsr
=
usr
=0 ; o
usr
=
vsr
=M
En introduisant ces valeurs dans les expressions des flux, on obtient:
su
= (
u
+
us
)
su
+
u
ru
sv
= (
v
+
vs
)
sv
+
v
rv
ru
= (
u
+
ur
)
su
+
u
su
rv
= (
v
+
vr
)
sv
+
v
sv
(3.4)
Do:
su
=
u
(
ru
+
su
) +
us
su
=
u
mu
+
us
su
sv
=
v
(
rv
+
sv
) +
vsr
sv
=
v
mv
+
vs
sv
ru
=
u
(
ru
+
su
) +
ur
ru
=
u
mu
+
ur
ru
rv
=
v
(
rv
+
sv
) +
vr
rv
=
v
mv
+
vr
rv
(3.5)
Ces quations sont traduites par des schmas quivalents selon les axes U et V.
Figure ( III.5) : Schma quivalent des flux selon laxe U
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 35
Figure ( III.6) :Schma quivalent des flux selon laxe V
Prenons en considration le fait que:
vs
=
us
=
s
; et
vr
=
ur
=
r
Des quations (3.1) drivent les quations diffrentielles des flux suivantes:
dt
mu
d
dt
us
di
s
l
dt
us
d
;
dt
mv
d
dt
vs
di
s
l
dt
vs
d
; (3.6)
dt
mu
d
dt
ur
di
r
l
dt
ur
d
;
dt
mv
d
dt
vr
di
r
l
dt
vr
d
;
O
mu
,
mv
reprsentent les composantes du flux magntisant selon les axes
direct et en quadratique U,V. Le problme revient donc dcrire le comportement du flux
magntisant dans le systme daxes U,V pour pouvoir valuer les quantits magntiques,
dt
mu
d
et
dt
mv
d
.
pour cela, on va dcomposer le flux
m
sur les axes U,V, (la mme chose pour le
courant
m
i ) tout en supposant que le courant magntisant est en phase avec le flux
magntisant (pertes fer ngliges), figure ( III.7).
De cette mme figure, on peut tirer les composantes du flux magntisant:
cos .
m mu
; (3.7)
sin .
m mv
; (3.8)
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 36
Figure ( III.7) : Dcomposition du flux selon les axes UV
Avec:
m
mu
m
mu
i
i
cos
; (3.9)
m
mv
m
mv
i
i
sin
; (3.10)
Sachant que
m
m
i
M
, on peut calculer :
M
dt
di
i
dt
dM
dt
) i M ( d
dt
d
mu
mu
mu mu
; (3.11)
M
dt
di
i
dt
dM
dt
) i M ( d
dt
d
mv
mv
mv mv
; (3.12)
La drive de linductance de magntisation M peut tre exprime comme:
dt
di
i
dt
di
i
i
1
i d
dM
dt
i d
i d
dM
dt
dM
mv
mv
mu
mu
m m
m
m
; (3.13)
Si on substitue cette quation dans les quations (3.11)-(3.12), on obtient les expressions
des flux telles que:
M
dt
di
dt
di
i
dt
di
i
i
i
i d
dM
dt
d
mu mv
mv
mu
mu
m
mu
m
mu
+ |
.
|
\
|
+ =
; (3.14)
i
m
m
i
mu
mu
mv
U
V
i
mv
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 37
dt
di
i
i . i
i d
dM
dt
di
M
i
i
i d
dM
mv
m
mv mu
m
mu
m
mu
2
m
;
On peut montrer facilement que:
M L M
i d
d
i d
dM
i
m
m
m
m
; (3.15)
O:
L - la drive du flux magntisant par rapport au courant magntisant appele
inductance dynamique.
Posons:
M L
i
i i
i d
dM
i
i i
2
m
mv mu
m m
mv mu
uv
L ; (3.16)
uv
mv
mu
mu
i
i
M L L ; (3.17)
De la mme faon on arrive :
uv
mu
mv
mv
i
i
M L L ; (3.18)
Avec:
uv
L Linductance cyclique dinter saturation;
mu
L Linductance cyclique de saturation selon laxe U;
mv
L Linductance cyclique de saturation selon laxe V.
Les inductances cycliques totales statoriques et rotoriques selon les axes U, V sont:
s mu su
l
L L
s mv sv
l
L L
r mu ru
l
L L (3.19)
r mv rv
l
L L
Dans le cas linaire, (de non saturation), on a: 0
uv
L et M
mv mu
L L .
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 38
Les inductances cycliques de saturation dans le rfrentiel
,
sont exprimes par:
2
m
2
m
m
m m
sin L cos L L
i
i
L L
2
m
2
m
m
m m
cos L sin L L
i
i
L L
Avec :
m
m
i
i
cos
(3.20)
m
m
i
i
sin
(3.21)
Linductance cyclique dinter saturation est :
) L L (
i
i i
i d
dL
i
i i
L
m
2
m
m m
m
m
m
m m
Avec : L linductance dynamique donne par la relation suivante
m
m
i d
d
L
,
Et
m
L linductance de magntisation
m
m
m
i
L
A partir des conditions magntiques linaires, il en rsulte que :
r r s s m m m
L L et , L L , L L L , 0 L
Lexpression du courant de magntisation est :
2
s s
2
r s m
) i i ( ) i i ( i
En remplaant les quantits de flux trouves dans le systme dquations (3.1) et aprs
tout calcul fait, on obtient le nouveau systme dquations qui tient compte de la saturation du
circuit magntique de la machine. Le rfrentiel est li au stator 0
coor
.
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 39
dt
di
dt
di
dt
di
dt
di
dt
di
l i r U
r s
r
m
s
m
s
s s s s
L L L L
dt
di
dt
di
dt
di
dt
di
dt
di
l i r U
r s
r
m
s
m
s
s s s s
L L L L ) 22 . 3 (
) i M i L (
dt
di
dt
di
dt
di
dt
di
dt
di
l i r 0
s r r r
r s
s
m
r
m
r
r r r
L L L L
) i M i L (
dt
di
dt
di
dt
di
dt
di
dt
di
l i r 0
s r r r
r s
s
m
r
m
r
r r r
L L L L
Pour pouvoir calculer les inductances M et L, on fait appel la caractristique de
magntisation de la machine releve exprimentalement [17].
III.2.Mise sous forme dtat du modle biphas :
En mettant le systme dquations (3.25) sous forme compacte, on aura :
| | | | | | | | | | | | | |
(
+ e + =
-
I L I C I A U B
r
(3.23)
Avec :
T
s s
0 0 U U U
;
T
r r s s
i i i i I
;
0 0 1 1 diag B
r r s s
r r r r diag A
| |
(
(
(
(
=
0 L 0 L
L 0 L 0
0 0 0 0
0 0 0 0
C
r m
r m
; | |
(
(
(
(
(
=
| o| | o|
o| o o| o
| o| | o|
o| o o| o
r m
r m
m s
m s
L L L L
L L L L
L L L L
L L L L
L
En mettant (3.26) sous forme dtat, on trouve :
| | | | | | | | | | | | | | { } I C I A U B L I
r
1
e =
(
-
(3.24)
Afin de complter la relation (3.24), on doit ajouter lexpression du couple lectromagntique
suivante:
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 40
) i i i i ( pL
2
3
C
r s r s m e
Et celle de la vitesse rotorique dynamique : F C C
dt
d
P
J
e m
r
.
O
m
C - le couple moteur (couple dentranement).
Pour simuler lauto-amorage, il suffit de rsoudre le systme dquations (3.24) en
tenant compte de la tension aux bornes des condensateurs exprime selon le systme daxes
gnralis par:
us coor vs
1
vs
vs coor us
1
us
U i
C
1
U
dt
d
U i
C
1
U
dt
d
(3.25)
Le systme (3.25) suivant les axes ) , ( devient :
s s
s s
i
C
1
U
dt
d
i
C
1
U
dt
d
(3.26)
La condition ncessaire pour lauto-amorage est exprime par :
2
r s
L
1
C
.
III.3.Auto-amorage de la gnratrice en rgime satur vide:
Afin de tenir compte de la saturation du circuit magntique de la machine, il faut
modliser la courbe de magntisation.
Plusieurs fonctions sont utilises ; cependant, il nexiste aucune fonction qui couvre tous les
points de la courbe, la modlisation reste approximative avec un minimum derreur.
La courbe est divise en plusieurs intervalles gaux.
Dans chaque intervalle, la courbe est interpole par un polynme de Lagrange dordre deux
condition quaux extrmits de chaque intervalle la continuit et la drivabilit soient
vrifies [18].
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 41
Connaissons le flux magntisant en fonction du courant magntisant, on dduit
lvolution des inductances M et L figure ( III.8) et figure ( III.9).
Figure ( III.8) : Variation de linductance de magntisation en fonction de
m
I
Figure ( III.9) : Variation de linductance dynamique en fonction de
m
I
Finalement pour la simulation, il suffit dintroduire la non-linarit du circuit
magntique au modle de la GAS et de limplanter sous lenvironnement Matlab/Simulink .
Le schma bloc de simulation est donn par la figure (III.10).
0 1 2 3 4 5 6 7 8 9 10
0.1
0.15
0.2
0.25
0.3
0.35
Im (A)
M
(
H
)
0 1 2 3 4 5 6 7 8 9
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Im (A)
L
(
H
)
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 42
III.3.1.Simulation de la gnratrice lauto-amorage vide :
Figure ( III.10) : Schma bloc du gnratrice en mode non Linaire vide
III.3.1.1.Rsultats des simulation:
Figure ( III.11) : Evolution de la tension dauto-amorage
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-300
-200
-100
0
100
200
300
Temps (s)
U
a
s
(
v
)
4.85 4.86 4.87 4.88 4.89 4.9 4.91 4.92 4.93 4.94 4.95
-300
-200
-100
0
100
200
300
Temps (s)
U
a
s
(
v
)
Zoom
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 43
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-4
-3
-2
-1
0
1
2
3
4
Temps (s)
I
a
s
(
A
)
Figure ( III.12) : Evolution du courant de magntisation
Figure( III.13) : Evolution du courant de ligne statorique
III.3.1.2.Interprtation des rsultats :
Dans cette application, la valeur de la capacit dexcitation est de F 420 , alors que la
vitesse de rotation est considre fixe et gale 100 rd/s.
Les figures (III.11) et (III.13) reprsentent respectivement lvolution de la tension et du
courant statoriques en fonctionnement vide de la gnratrice asynchrone cage. Au
dmarrage, la tension et le courant gnrs croient de faon exponentielle, puis se stabilisent
respectivement 250V et 3A en rgimes totalement tablis t=1.5s, et cest linstant o le
courant de magntisation atteint son rgime satur figure (III.12).
On constate que les volutions des tensions et des courants statoriques suivent la forme
de lvolution du courant de magntisation.
4.88 4.9 4.92 4.94 4.96 4.98 5
-4
-3
-2
-1
0
1
2
3
4
Temps (s)
I
a
s
(
s
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Temps (s)
i
m
(
A
)
Zoom
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 44
III.4.Prsentation de la gnratrice asynchrone en charge R :
On utilise le schma monophas cot stator dans le repre (d,q), reprsent dans la
Figure( III.14) et (III.15) .
Figure( III.14) : Schma monophase statorique charge R dans le repre ( q)
Figure( III.15) : Schma monophase statorique charge R dans le repre (d)
Daprs le schma de la figure ( III.14) ( III.15) le courant statorique Is est donn par
la formule suivante dans le repre (d-q) :
(3.27)
Avec :
= .
= .
(3.28)
Aprs remplacement de lquation (3.27) dans lquation (3.28) on obtient :
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 45
(3.29)
Le systme dquation dtat Gnratrice asynchrone en charge R :
0 0 0
0 0 0 -1 0
0 0
0 -
0 -1
0 0 0
= 0
0 0 *
0 0
0 0
0 0 0 0 1 0
0 0 0
1
0 0 0 0 0 1
0
1
0 0 0
1
III.4.1.Simulation de la gnratrice lauto-amorage en charge R :
Figure (III.16) : Schma bloc de la gnratrice en mode non Linaire en charge R
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 46
III.4.1.1. Rsultats des simulation:
Figure( III.17) : Evolution de la tension dauto-amorage
Figure( III.18) : Evolution du courant de ligne statorique
III.4.1.2.Interprtation des rsultats :
A l'instant t = 2.5 s on branche brusquement une charge rsistive aux bornes de la
gnratrice auto-excite. La tension diminue l instant d'introduction de la charge figure
(III.17) tandis que le courant de la ligne figure ( III.18) diminue pour fournir le courant de
charge. La figure (III.17) et ( III.18) montre les rsultats pour (C=420F, n=955 tr/min,
R=250 ).
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-300
-200
-100
0
100
200
300
Temps (s)
U
a
s
(
v
)
a vide R
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-8
-6
-4
-2
0
2
4
6
8
Temps (s)
i
a
s
(
A
)
a vide R
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 47
III.5.Prsentation de lauto-amorage en charge rsistive-inductive (RL) :
Le principe de lauto-amorage en charge demeure le mme qu vide, sauf que les
quations de lexcitation vont prendre une autre forme. Sachant que les charges sont
connectes en toile aux bornes de la gnratrice, les quations dans le repre de Park
gnralis ) , ( V U sont [14] ; [19]. :
usch ch coor vsch ch vsch ch us
us coor vs vs
vsch ch coor usch ch usch ch us
vs coor us us
i L i
dt
d
L i R U
U i
C
1
U
dt
d
i L i
dt
d
L i R U
U i
C
1
U
dt
d
(3.30)
Avec :
vsch vs vc
usch us uc
i i i
i i i
(3.31)
En substituant (3.31) dans (3.30) et en rcrivant les quations selon
, , on obtient le
systme dquations suivant :
sch ch sch ch s
sch s s
i
dt
d
L i R U
) i i (
C
1
U
dt
d
(3.32)
sch ch sch ch s
sch s s
i
dt
d
L i R U
) i i (
C
1
U
dt
d
(3.33)
En mettant les systmes dquations (3.32) et (3.33) sous forme dtat, on trouve :
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 48
) i R U (
L
1
i
dt
d
) i i (
C
1
U
dt
d
sch ch s
ch
sch
sch s s
(3.34)
) i R U (
L
1
i
dt
d
) i i (
C
1
U
dt
d
sch ch s
ch
sch
sch s s
(3.35)
III.5.1.Simulation de la gnratrice lauto-amorage en charge RL :
Figure ( III.19) : Schma bloc de la gnratrice en mode non Linaire en charge RL
III.5.1.1.Rsultats des simulation:
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 49
Figure (III.20) : Evolution de la tension dauto-amorage en charge RL
Figure ( III.21) : Evolution du courant de ligne statorique en charge RL
Figure( III.22) : Evolution du courant de charge(charge RL)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-300
-200
-100
0
100
200
300
Temps (s)
U
a
s
(
v
)
RL
a vide
3.6 3.7 3.8 3.9 4 4.1 4.2 4.3
-1.5
-1
-0.5
0
0.5
1
1.5
Temps (s)
i
c
h
(
A
)
Zoom
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-8
-6
-4
-2
0
2
4
6
8
Temps (s)
i
a
s
(
A
)
RL a vide
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-1.5
-1
-0.5
0
0.5
1
1.5
Temps (s)
i
c
h
(
A
)
a vide RL
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 50
Figure ( III.23) : Evolution du courant de magntisation en charge RL
III.5.1.2.Interprtation des rsultats :
Dans cette application, la vitesse de rotation est fixe et prise gale s rd / 100 . La valeur
de la capacit dexcitation est de F C 420 . Les charges 250 R et mH 500 L
ch
sont
appliques s t 5 . 2 .
Linsertion de la charge engendre des diminutions aux niveaux de lensemble des
caractristiques de la GAS par rapport celles observes en fonctionnement vide, qui sont
de % 8 au niveau de la tension statorique figure (III.20), de % 7 du courant statorique figure
( III.21) et de % 17 du courant de magntisation (figure III.23).
Cela est d essentiellement la dmagntisation de la machine et au manque dnergie
ractive ncessaire dune part pour la magntisation de la machine et dautre part pour
lalimentation de la charge, en particulier celle inductive qui est consommatrice de lnergie
ractive, et cest aux condensateurs dexcitation de satisfaire et de partager lnergie quils
produisent entre les deux consommatrices de la puissance ractive.
La figure (III.22) montre lvolution du courant aux bornes de la charge qui se stabilise
A 7 . 0 .
III.5.2.Influence de la vitesse:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.5
1
1.5
2
2.5
3
Temps (s)
i
m
(
A
)
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 51
Dans ce cas , on veut tudier linfluence de la variation soudaine de la vitesse sur la
tension et le courant de la GAS.
III.5.2.1 .Rsultats des simulation:
Figure (III.24) : Influence de la vitesse sur la tension statorique
Figure (III.25) : Influence de la vitesse sur le courant statorique
III.5.2.2 .Interprtation des rsultats :
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-150
-100
-50
0
50
100
150
Temps (s)
U
a
s
(
v
)
n=716.25 Tr/min n=955 Tr/min
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-4
-3
-2
-1
0
1
2
3
4
Temps (s)
i
a
s
(
A
)
n=716.25 Tr/min n=955 Tr/min
Chapitre III Modlisation de la gnratrice en saturation
Universit Kasdi Merbah Ouargla 52
La machine est entrane la vitesse n=955 tr/min jusqu t=3s ; t=3s en diminuant
la vitesse n=716.25 tr/min, linfluence de cette variation sur la tension et le courant statorique
montre une diminution du courant et de la tension.
III.6.Conclusion :
Dans ce chapitre nous avons simul la gnratrice cage auto excite dans le cas d'un
fonctionnement satur autonome vide , et en charge (rsistive ou rsistive inductive).
Les grandeurs statoriques ne sont plus imposes et il faut fournir la machine la
puissance ractive ncessaire sa magntisation.
Les rsultats de simulations montr que les grandeurs statoriques sont directement
influence par la variation des charges, ainsi que le changement de vitesse de rotation.
Conclusion gnrale
Conclusion gnrale
53 Universit Kasdi Merbah Ouargla
Conclusion gnrale :
Les moteurs asynchrones triphass reprsentent plus de 80 % du par moteur
lectrique.
On distingue deux types de machines asynchrones selon que les enroulements
rotorique sont bobins ou cage dcureuil. Les avantages des moteurs cage dcureuil
rsident dans leur simplicit de construction, de manuvre et dentretien, leur robustesse
mcanique et leur faible cout de revient. Le moteur asynchrone est trs couramment utilis
dans une gamme de puissances allant de quelques centaines de watts plusieurs milliers
de kilowatts. Il est caractris par un fonctionnement stable, une vitesse pratiquement
constante et un rendement lev autour de la charge nominale.
Le but de ce travail consacr ltude et la modlisation de gnratrice asynchrone
cage dans les deux modes de fonctionnement (linaire, saturation) base des hypothses
poses.
Ainsi que linfluenc des charges (rsistive, inductive) et la variation de vitesse
dentrainement, pour ce l notre mmoire ce repartie en trois chapitre.
Le premier chapitre est ddi aux gnralits sur la machine asynchrone cage o
on a reprsent sa construction, son principe de fonctionnement.
Le deuxime chapitre est consacr la modlisation de la gnratrice en mode
linaire base sur des quations de tensions, courants, et couple.
Des essais vide et en charge (rsistive, inductive) et variation de vitesse ont t
modlis, et les rsultats ont montr leur influences sur la gnratrice.
Le troisime chapitre consacr la modlisation de la gnratrice en mode satur
ainsi que le mode rel de la gnratrice.
Un ensemble des essais montr que les grandeurs statoriques sont directement
influence par la variation des charges (rsistive, inductive, vitesse).
Annexe
Paramtres de la gnratrice a synchrone cage :
P
n
= 2.2 kW, Puissance nominal
I
n
=9/5.3 A, Courant du rseau
V
n
=220/380V Tension du rseau
f = 50 HZ Frquence du rseau
nr =955 tr/min Vitesse de rotation du rotor
P=2; Nombre de pairs de ples
f = 0 Frottement
J =0.005 Kg.m2 Moment dinertie.
rs=3.38; Rsistance statorique.
rr=3.88; Rsistance rotorique.
Ls = 0.324+Lm H Inductance statorique.
Lr = Ls Inductance rotorique.
Lm=0.317; Inductance mutuelle.
m=Lm
F e
L
C
s
5 3 . 6
.
1
2
Er=1;
R=250 Rsistance de la charge
L
ch
=500mH Inductance de la charge
F e
L
C
s
4 2
.
1
2
Annexe
Tableau des figures
Universit Kasdi Merbah Ouargla
Figure Nom de Figure
Numro de
page
Figure (I. 1) Machine asynchrone avec puissance de 8KW 2
Figure (I.2) Les lements de la machine asynchrone
3
Figure ( I. 3) Symbole gnrale d'un moteur et gnerateur
asynchrone triphas
4
Figure (I. 4) Coupe d'un moteur triphas
4
Figure (I. 5) Stator d'un moteur asynchrone triphase
5
Figure ( I. 6) Type de rotor
5
Figure ( I. 7) Principe de fonctionnement dun moteur asynchrone
7
Figure ( II. 5) Reprsentation de la machine asynchrone cage
d'cureuil as, bs, cs : phases du stator ; Ar , Br ,Cr:
phases du rotor.
15
Figure ( II. 2) Reprsentation de la machine dans le repre diphas
17
Figure( II. 3) Schma quivalent en rgime dynamique de la
machine asynchrone dans un rfrentiel arbitraire l'axe
d
18
Figure ( II. 4) Schma reprsentatif de la GAS auto-amore
20
Figure ( II. 5) Schma quivalent lors de lauto-amorage vide
21
Figure ( II. 6) Fonctionnement en gnratrice auto-amore
21
Figure ( II. 7) Dtermination du domaine damorage
24
Figure ( II. 8) Diagramme vectoriel de la gnratrice auto-amore
26
Figure (II. 9) Schma bloc de la gnratrice en mode Linaire vide
28
Tableau des figures
Tableau des figures
Universit Kasdi Merbah Ouargla
Figure ( II. 10) Tension d'auto-amorage vide
29
Figure ( II. 11) Courant statorique induit
29
Figure ( II. 12) Courant statorique induit 30
Figure ( II. 13) Tension d'auto-amorage
30
Figure (III.1) Caractristique de fonctionnement vide 33
Figure (III.2) Schma quivalent de la GAS dans le rfrentiel de
Park
34
Figure ( III.3) Disposition des enroulements suivant les axes U, V
35
Figure (III.4) Reprsentation schmatique des flux selon les axes
U,V
35
Figure ( III.5) Schma quivalent des flux selon laxe U
37
Figure ( III.6) Schma quivalent des flux selon laxe V
37
Figure ( III.7) Dcomposition du flux selon les axes UV
38
Figure ( III.8) Variation de linductance de magntisation en
fonction de
m
I
43
Figure ( III.9) Variation de linductance dynamique en fonction de
m
I
44
Figure ( III.10) Schma bloc du gnratrice en mode non Linaire
vide
44
Figure ( III.11) Evolution de la tension dauto-amorage
45
Figure ( III.12) Evolution du courant de magntisation 45
Figure ( III.13) Evolution du courant de ligne statorique 45
Figure( III.14) Schma monophase statorique cage R dans le
repre ( q)
46
Figure( III.15) Schma monophase statorique cage R dans le
repre (d)
46
Figure (III.16) Schma bloc du gnratrice en mode non Linaire en
charge R
48
Tableau des figures
Universit Kasdi Merbah Ouargla
Figure( III.17) Evolution de la tension dauto-amorage
48
Figure( III.18) Evolution du courant de ligne statorique 49
Figure ( III.19) Schma bloc de la gnratrice en mode non Linaire
en charge RL
51
Figure (III.20) Evolution de la tension dauto-amorage en charge
RL
51
Figure ( III.21) Evolution du courant de ligne statorique en charge RL 52
Figure( III.22) Evolution du courant de charge (charge RL) 52
Figure ( III.23) Evolution du courant de magntisation en charge RL 53
Figure (III.24) Influence de la vitesse sur la tension statorique
54
Figure (III.25) Influence de la vitesse sur le courant statorique 54
Bibliographie
Universit Kasdi Merbah Ouargla
[1].J. Chatelain, Machines lectriques. Volume X du trait d'lectricit, d'lectronique
et d'lectrotechnique, Presse polytechnique romande, d. Georgi 1983, (rdit par
Dunod, 1993) .
[2].Jean-Pierre Caron, Modlisation et commande de la machine asynchrone, vol. 7,
TECHNIP, coll. Mthodes et pratiques , 1995.
[3].Mikhal Kostenko et Ludvik Piotrovski, Machines lectriques, Tomes I et II,
ditions de Moscou (Mir), 1969, (rdit en 1979).
[4].M. Poloujadoff, Conversions lectromcaniques , Dunod, Paris, 1969.
[5].M. Poloujadoff, Machines asynchrones - Rgimes quelconques, Encyclopdie de
Techniques de l'ingnieur, 2000.
[6].B. Saint-Jean, lectrotechnique et Machines lectriques , 1976.
[7].Guy Seguier et Francis Notelet, lectrotechnique industrielle, Tec et doc, 2006.
[8].Francis Labrique, Ernest Matagne, Damien Grenier et Herv Buyse,
lectromcanique, convertisseurs d'nergie et actionneurs, Dunod, 2001.
[9].Elkheir Merabet Commande Floue Adaptative dune Machine Asynchrone Double
Etoile Memoire de Magister en Electrotechnique Universit de Batna 2008 .
[10].Davide Aguglia Identification des paramtres du moteur induction triphas en
vue de sa commande vectorielle Universit Laval Qubec, Canada, 2004.
Bibliographie
Bibliographie
Universit Kasdi Merbah Ouargla
[11] Luc MUTREL, Rgimes statique et dynamique des Machines Asynchrones,
Technosup, dition
Ellipses
[12].Kopilov I.P. Modlisation mathmatique des machines lectriques. Moscou ;
EditionVischaya chkola ; 1987.
[13].Abdessemed R., kadjoudj K. Modlisation des machines lectriques, Presses de
lUniversit de Batna, Algrie, 1997.
[14].Lesenne J. ; Notelet F& Seguier G. ; introduction llectrotechnique approfondie.
Editions Technique et documentation, Paris, 1981.
[15]. D. Kairous, S. Mekhtoub, R. Ibtiouen, O. Touhami, Modle dun gnrateur
asynchrone autoamorc lors dun retour rseau, Algerian Journal of Technology,P49-55,
ENP,2005..
[16].Belamoudi A., Etude et simulation dun systme de conversion dnergie lectrique
base dune machine asynchrone, Mmoire de Magister de lUniversit de Batna,
Algrie, Dcembre 1996.
[17].Abdelhamid L. Contribution ltude des performances des gnrateurs
lectromagntiques utiliss dans les systmes oliens. Mmoire de magister, Universit de
Batna , Algrie, 2008
[18].Ivanov-Smolensky A.V. Machines lectriques. M., Ed. Energie, 1980.
[19] El Aimani S., Modlisation de diffrentes technologies d'oliennes intgres dans
un rseau de moyenne tension, thse de doctorat, Universit des sciences et technologies
de Lille, France, 2004.
You might also like
- OuidirJuba DiabiMehandDocument66 pagesOuidirJuba DiabiMehandMohamed ChahedNo ratings yet
- Presentation Simulink SimscapeDocument71 pagesPresentation Simulink SimscapeAuzlem Faouzi100% (1)
- Manual MHT 10160 L TurboDocument150 pagesManual MHT 10160 L TurboViacheslav BurmistrNo ratings yet
- PC290-7 Ufss000802 0502Document20 pagesPC290-7 Ufss000802 0502Mohammed NADJIB DEBBALNo ratings yet
- Manitou Man'go 12 (FR)Document4 pagesManitou Man'go 12 (FR)ManitouNo ratings yet
- 608 S - Les Différents Modèles de Pelles Et Les ApplicationsDocument90 pages608 S - Les Différents Modèles de Pelles Et Les ApplicationsChakrouneNo ratings yet
- Distribuer Variateurs de Vitesse Industriels 2 Bac Science Dingenieur PDFDocument3 pagesDistribuer Variateurs de Vitesse Industriels 2 Bac Science Dingenieur PDFayoumaaoui5No ratings yet
- Documantation Chapitre 3 Les-Circuits-HydrauliquesDocument43 pagesDocumantation Chapitre 3 Les-Circuits-HydrauliquesSabrine Ben Hmida100% (1)
- TRANS'BUS - Dossier - Mécanique Des AutobusDocument6 pagesTRANS'BUS - Dossier - Mécanique Des AutobusMed Ali100% (1)
- Schéma Hydraulique CompletDocument3 pagesSchéma Hydraulique CompletANo ratings yet
- Simovert OnduleurDocument219 pagesSimovert Onduleurarcosse6940100% (1)
- Rapport PFE Chenane SidneDocument95 pagesRapport PFE Chenane SidneSidne ChenaneNo ratings yet
- Fonction PId D'un Variateur ATV320 V1Document8 pagesFonction PId D'un Variateur ATV320 V1Nicolas LetardNo ratings yet
- Tracteur Cukurova 885Document6 pagesTracteur Cukurova 885nairo 12No ratings yet
- La VitesseDocument94 pagesLa VitesseMohamed TaihiNo ratings yet
- Notice D'entretien: Compresseur Pour Le BTP Mobilair M115Document406 pagesNotice D'entretien: Compresseur Pour Le BTP Mobilair M115vanbeveren100% (1)
- Les Vannes AutoDocument48 pagesLes Vannes AutohamdiiiiiiiiiiiiiiiiNo ratings yet
- Flow Doc - PDF Volvo d12dDocument5 pagesFlow Doc - PDF Volvo d12dMehdi Chakroune100% (1)
- V G930toG960 31C1002232 2009 04Document24 pagesV G930toG960 31C1002232 2009 04ouael100% (1)
- Rapport Stephane Sanhouidi FinDocument46 pagesRapport Stephane Sanhouidi FinSanhouidi StephaneNo ratings yet
- Devoir Session de Formation Lecture de Schemas HydrauliquesDocument3 pagesDevoir Session de Formation Lecture de Schemas HydrauliquesHernest FerraNo ratings yet
- PfesaidrachibiDocument99 pagesPfesaidrachibiSCORP LIONo ratings yet
- Volvo Tombereau A35e A40eDocument28 pagesVolvo Tombereau A35e A40eFelix AlvarezNo ratings yet
- Tracto JCB Fiche TechniqueDocument28 pagesTracto JCB Fiche TechniqueTALLETNo ratings yet
- Marketing OperationnelDocument11 pagesMarketing OperationnelMohamed TaziNo ratings yet
- Rapport de Stage BP Hanane LafaiDocument24 pagesRapport de Stage BP Hanane LafaiHànàne LàFaiNo ratings yet
- gpl2 - Etude Du Systeme PDFDocument25 pagesgpl2 - Etude Du Systeme PDFkamel benrehailNo ratings yet
- NAFTALDocument16 pagesNAFTALYacine Tarik AizelNo ratings yet
- Rapprt de Stage PFFDocument85 pagesRapprt de Stage PFFHajar ZohayrNo ratings yet
- Fic-IsBaeKG7Zt80ONkvJpTy4Wx2 AzMofY1qnhuXm5LHD3gES PDFDocument26 pagesFic-IsBaeKG7Zt80ONkvJpTy4Wx2 AzMofY1qnhuXm5LHD3gES PDFWael TriguiNo ratings yet
- Thème Etude Et Réalisation D'un Hacheur À Quatre Quadrants Commandé Par ArduinoDocument79 pagesThème Etude Et Réalisation D'un Hacheur À Quatre Quadrants Commandé Par ArduinoMac JonsonNo ratings yet
- Rapport FinalDocument77 pagesRapport FinalMed TayebNo ratings yet
- Cours Shemas Electrique DetaileeDocument73 pagesCours Shemas Electrique DetaileeZAAIRA HAMZANo ratings yet
- Rapport de StageDocument35 pagesRapport de StageAchraf ElyounoussiNo ratings yet
- Volvo FM-Caractéristiques-Techniques-FRDocument18 pagesVolvo FM-Caractéristiques-Techniques-FRSaidi JalelNo ratings yet
- Electrovanne (Réduction Proportionnelle) - Etalonnage - Clapet de Décharge 1 Et Clapet de DéchargeDocument20 pagesElectrovanne (Réduction Proportionnelle) - Etalonnage - Clapet de Décharge 1 Et Clapet de DéchargeHUSEINNo ratings yet
- Man. + TF Sertisseuse S1-S2 - FR - Print PDFDocument52 pagesMan. + TF Sertisseuse S1-S2 - FR - Print PDFMaman Moustapha HabibNo ratings yet
- Kherbouche Souhila, Moussaoui ChafiaDocument145 pagesKherbouche Souhila, Moussaoui ChafiaOussama El HjoujiNo ratings yet
- 1SCC303003M0306Document155 pages1SCC303003M0306ahmed khodja karimNo ratings yet
- SSP 367 Boîte Automatique 6 Rapports 09D de L'audi Q7Document72 pagesSSP 367 Boîte Automatique 6 Rapports 09D de L'audi Q7Daniel Fabrice Ahipo100% (1)
- Méthode Et Système de Diagnostic de Panne Pour Un Engin de TravailDocument8 pagesMéthode Et Système de Diagnostic de Panne Pour Un Engin de TravailAbourizk BadiNo ratings yet
- Memoire Rehabilitation de L Atelier Des Flexibles-3-1Document79 pagesMemoire Rehabilitation de L Atelier Des Flexibles-3-1Koffi AmedendiNo ratings yet
- Reglage Carburateur Maruti 800Document2 pagesReglage Carburateur Maruti 800Mohamed Programmeur100% (1)
- Accouplements Elastiques EA76F432Document49 pagesAccouplements Elastiques EA76F432mouradkadiriNo ratings yet
- Régler Le Jeu Aux SoupapesDocument7 pagesRégler Le Jeu Aux SoupapesFosseni DialloNo ratings yet
- Quels Sont Les Différents Types de Moteurs Électriques - ConcepTECDocument4 pagesQuels Sont Les Différents Types de Moteurs Électriques - ConcepTECelkajjalNo ratings yet
- Copie de MID 128 Description Des SignauxDocument5 pagesCopie de MID 128 Description Des SignauxAbdelhak EzzahriouiNo ratings yet
- Mise en Œuvre D'un Système de Contrôle D'accès Basé Sur Reconaisance Facial Et Emprien DigitalDocument104 pagesMise en Œuvre D'un Système de Contrôle D'accès Basé Sur Reconaisance Facial Et Emprien DigitalAIMEN HAMOUDANo ratings yet
- Auto Hall StageDocument44 pagesAuto Hall StagerdabdaoudiNo ratings yet
- Chapitre IIDocument16 pagesChapitre IIMed TayebNo ratings yet
- Volvo 2003 ManuelatelierDocument48 pagesVolvo 2003 Manuelatelierraymonde raymond100% (2)
- HFHL2874Document24 pagesHFHL2874Boumediene CHIKHAOUI100% (1)
- Variation de VitesseDocument50 pagesVariation de VitesseOussamaNajiNo ratings yet
- Commandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeDocument159 pagesCommandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeSofiane ZozoNo ratings yet
- Conception Optimale D'une Micro Pompe Par La Méthode Des Algorithmes Génétiques (AG)Document71 pagesConception Optimale D'une Micro Pompe Par La Méthode Des Algorithmes Génétiques (AG)Hicham ZaimenNo ratings yet
- YASSA NaceraDocument108 pagesYASSA NaceraMazigh U RamdanNo ratings yet
- Theme: Modelisation de La Decharge Couronne en Geometrie Fil-CylindreDocument127 pagesTheme: Modelisation de La Decharge Couronne en Geometrie Fil-CylindreMohamed MtsNo ratings yet
- La Thèse PDFDocument103 pagesLa Thèse PDFAnis AmraneNo ratings yet
- These Abrar Finale 2018Document136 pagesThese Abrar Finale 2018badis hamhoumNo ratings yet
- Rapport Master Roche PDFDocument41 pagesRapport Master Roche PDFelmerkhNo ratings yet
- Victor Hugo Chante Le Prophète Mohammed (Sas)Document3 pagesVictor Hugo Chante Le Prophète Mohammed (Sas)OmarNo ratings yet
- These VF Ayan Mahamoud Diagnostic PDFDocument212 pagesThese VF Ayan Mahamoud Diagnostic PDFelmerkhNo ratings yet
- Systemes Lineaires BouclesDocument9 pagesSystemes Lineaires BouclesGhofrane TlNo ratings yet
- Recueil Exercices 075Document45 pagesRecueil Exercices 075Mouhsine Moqine100% (1)
- Alazard 2248Document74 pagesAlazard 2248Kawther BenNo ratings yet
- Bouaraki MouloudDocument124 pagesBouaraki Mouloudelmerkh100% (1)
- Asservissement Moteur H04Document7 pagesAsservissement Moteur H04elmerkhNo ratings yet
- Intro MatlabDocument42 pagesIntro MatlabSalem AkkariNo ratings yet
- Tel 00005733Document0 pagesTel 00005733elmerkhNo ratings yet
- TD MatlabDocument2 pagesTD MatlabelmerkhNo ratings yet
- Cours1 VP PDFDocument65 pagesCours1 VP PDFlogosNo ratings yet
- Capteurs Actionneurs Master SISDocument41 pagesCapteurs Actionneurs Master SISelmerkhNo ratings yet
- Support Cours Commande Numerique Master 10Document45 pagesSupport Cours Commande Numerique Master 10Lamjed AouaniNo ratings yet
- 4 TitaouineDocument7 pages4 Titaouineyacine236No ratings yet
- Programmation Avancée Langage CDocument129 pagesProgrammation Avancée Langage CLyes AkramNo ratings yet
- Nouveau Document TexteDocument1 pageNouveau Document TexteelmerkhNo ratings yet
- 2005 ELT 2sujetsDocument3 pages2005 ELT 2sujetselmerkhNo ratings yet
- ISO9001Document66 pagesISO9001Mostafa BelaaroussiNo ratings yet
- ConjugaisonDocument3 pagesConjugaisonromeroniNo ratings yet
- FR NeurologieDocument17 pagesFR Neurologiemaroxibo100% (1)
- Sourah WaqiahDocument106 pagesSourah WaqiahFleur De Lune100% (4)
- 1.3.1. La SubordinationDocument6 pages1.3.1. La SubordinationFrédéric LetellierNo ratings yet
- 10 ALADIAHDocument2 pages10 ALADIAHNicolasNo ratings yet
- Examen2 Structure Machine 2Document1 pageExamen2 Structure Machine 2benhadjeba boumedyenNo ratings yet
- Sturdza - Europe Orientale Et Le Role Historique Des MaurocordatoDocument519 pagesSturdza - Europe Orientale Et Le Role Historique Des Maurocordatobogdancretu21011978No ratings yet
- 874-Article Text-3260-1-10-20230113Document17 pages874-Article Text-3260-1-10-20230113khadija rabibNo ratings yet
- Fonctions Executives CB - 3 DiapoDocument19 pagesFonctions Executives CB - 3 DiapoFARHAT HAJERNo ratings yet
- TURCS Et MONTENEGRiNS: F.LENORMANT, 1866 PARiSDocument524 pagesTURCS Et MONTENEGRiNS: F.LENORMANT, 1866 PARiSYasef BayNo ratings yet
- Champ Lexical Du ThéâtreDocument1 pageChamp Lexical Du ThéâtreBurt Son100% (1)
- Mohamed Sifaoui - Où Va L'algérie... Et Les Conséquences Pour La France PDFDocument248 pagesMohamed Sifaoui - Où Va L'algérie... Et Les Conséquences Pour La France PDFikonten4267% (3)
- Cours IE - Fahd ASSILADocument45 pagesCours IE - Fahd ASSILAadnane.iherkachen100% (1)
- 7 Geometrie de L'espaceDocument16 pages7 Geometrie de L'espaceKakou Light MalanNo ratings yet
- استشهادات تطبيق الكفاياتDocument80 pagesاستشهادات تطبيق الكفاياتselotmani100% (1)
- TDR Certificat Coach Professionnel - Level 1Document3 pagesTDR Certificat Coach Professionnel - Level 1nicaise djueNo ratings yet
- Organisation D'un Service D'audit InterneDocument49 pagesOrganisation D'un Service D'audit InterneSouha Layane100% (46)
- 2.2.4.11 Lab - Configuring Switch Security FeaturesDocument10 pages2.2.4.11 Lab - Configuring Switch Security FeaturesOumou DialloNo ratings yet
- Ecritures Du Moi Lignes de Vie t1Document544 pagesEcritures Du Moi Lignes de Vie t1david balibalNo ratings yet
- Exercice Verbe Etre Et Avoir - Google SearchDocument1 pageExercice Verbe Etre Et Avoir - Google SearchWafa DridiNo ratings yet
- Dokumen - Tips Cours Mthodes 1 Variable Alatoire Et Loi de ProbabilitDocument10 pagesDokumen - Tips Cours Mthodes 1 Variable Alatoire Et Loi de Probabilitmayar mimiNo ratings yet
- Comment Poser Des Questions FerméesDocument2 pagesComment Poser Des Questions FerméesDalila RgNo ratings yet
- Neuro PsychoDocument352 pagesNeuro PsychoNounou NouhadeNo ratings yet
- RecueilExamSMA5 M28Document14 pagesRecueilExamSMA5 M28Gustave KerryNo ratings yet
- Traitement de l'HTADocument15 pagesTraitement de l'HTABMA-medecineNo ratings yet
- Appel Fouad LarouiDocument4 pagesAppel Fouad LarouihattabsatNo ratings yet
- Les Entraves A La Professionnalisation DDocument13 pagesLes Entraves A La Professionnalisation DFatoumata MaigaNo ratings yet
- 78842-Art3 Brienn N N Robidoux Et Al. 39192-V3N1 201705Document11 pages78842-Art3 Brienn N N Robidoux Et Al. 39192-V3N1 201705Rachid BenhmidouNo ratings yet
- 3-Effort IntérieurDocument8 pages3-Effort IntérieurGOUAL SaraNo ratings yet