Professional Documents
Culture Documents
A2 Sensores
Uploaded by
servisepOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
A2 Sensores
Uploaded by
servisepCopyright:
Available Formats
1
SENSORES Y
ACTUADORES
2
Sensores y Actuadores
Secciones:
Introduccin
Sensores
Actuadores
Conversin A/D y D/A
Sensores y actuadores industriales
SCADA
3
Introduccin
4
Interfaz Computador-Proceso
Para llevar a cabo el control de procesos, el computador debe
recopilar datos de, y transmitir seales a, los procesos de
produccin
Componentes necesarios para implantar el interfaz:
Sensores para medir variables de proceso continuo y discreto
Actuadores para llevar los parmetros continuos y discretos al
proceso
Dispositivos de conversin A/D y D/A
Dispositivos E/S para datos discretos
5
Control de procesos por computador
Actuadores
Actuadores
Controlador
Controlador
Proceso
Sensores
Sensores
D/A
D/A
A/D
A/D
Dispositivos de entrada Dispositivos de salida
Variables
Continuas y
Discretas
Parmetros
Continuos y
Discretos
6
Arquitectura bsica de un computador
7
Transductores
Convierten la informacin suministrada por un sensor (piezoelctrico,
resistencia, ...) en una seal estndar que se pueden procesar de forma
digital.
Algunos transductores tienen directamente una salida digital (bus de
campo) y estn integrados en el sensor. Otros se encuentran a distancias
de varios metros desde el sensor.
8
Sensores
9
Sensores
Medio
Fsico
Medio
Fsico
Elemento
Sensor
Elemento
Sensor
Acondicionamiento
Acondicionamiento
Objeto
manipulado
Objeto
manipulado
Temperatura Resistencia Voltaje Informacin
Estmulo (s)
Seal (S)
10
Funcin de Transferencia
donde S = seal de salida; s = estmulo; y f(s) = relacin funcional
Para sensores binarios : S = 1 si s > 0 y S = 0 si s < 0.
La forma funcional ms simple de un dispositivo de medicin
analgica es una lnea recta, tal como:
donde C = valor de salida para un valor cero del estmulo (offset)
y m = constante de proporcionalidad (sensibilidad)
) (s f S =
ms C S + =
11
Ejemplo
La tensin de salida de un sensor de termopar es de 42,3 mV a
105 C de temperatura . Previamente se haba inicializado para que
emita una tensin nula a 0 C. Dado que existe una relacin lineal
de entrada/salida entre las dos temperaturas, determinar (1) la
funcin de transferencia del termopar, y (2) la temperatura
correspondiente a una tensin de salida de 15,8 mV.
Solucin:
42.3 mV = 0 + m(105C) = m(105C)
m = 0.4028571429
S = 0.4 (s)
15.8 mV = 0.4 (s)
15.8 / 0.4 = s
s = 39.22C
ms C S + =
12
Un sensor es un dispositivo capaz de medir magnitudes fsicas o
qumicas que contiene un transductor y convierte un estmulo a
otra forma ms til para medir el estmulo
Dos categoras bsicas:
Analgico
Discreto
Binario
Digital (por ejemplo, contador de pulsos)
Ultrasnico
(distancia)
Luz
(intensidad de luz)
Contacto
Sonido
(presin db)
Sensores
13
Otros sensores
Temperatura
RFID
Cdigo de barras
Proximidad
Visin
Girscopo
Girocomps
Inclinacin/Aceleracin
etc.
14
Actuadores
15
Actuadores
Dispositivos hardware que convierten una seal de comando del
controlador en un cambio en un parmetro fsico
El cambio suele ser mecnico (por ejemplo, posicin o velocidad)
Un actuador es tambin un transductor, ya que cambia de un tipo
de cantidad fsica en alguna forma alternativa
Un actuador se activa normalmente mediante una seal de
comando de bajo nivel energtico, por lo que puede ser necesario
un amplificador que proporcione la potencia suficiente para
manejar el actuador
16
Actuadores
Procesamiento
de seal y
amplificacin
Procesamiento
de seal y
amplificacin
Mecanismo
Mecanismo
Elctrico
Elctrico
Hidrulico
Neumtico
Hidrulico
Neumtico
Elemento de
actuacin
final
Elemento de
actuacin
final
Sensor de la
seal controlada
Sensor de la
seal controlada
Seal
lgica
Seal
controlada
17
Tipos de actuadores
Actuadores elctricos
Motores elctricos
Servomotores DC
Motores de corriente alterna
Motores paso a paso
Solenoides
Actuadores hidrulicos
Usa fluido hidrulico para amplificar la seal de
comando del controlador
Actuadores neumticos
Usa aire comprimido como fuerza motriz
18
Motor paso a paso y servomotor
Motor paso a paso
Tren de pulsos
de entrada
Mesa de trabajo
Pieza
Cabezal
Movimiento lineal
mesa de trabajo
Rotacin del
husillo
Entrada
Comparador
D/A
Servomotor
Mesa de trabajo
Cabezal
Movimiento lineal
mesa de trabajo
Husillo
Seal de realimentacin
Encoder
ptico
19
Motores Paso a Paso
Posicionamiento preciso
Control mediante secuencia de pulsos de tensin
Dos tipos
Motores bipolares: Circulacin de corriente en ambos sentidos
Motores unipolares: Circulacin de corriente en un nico sentido
20
Motores Paso a Paso unipolares
Compuesto por 2 bobinas con toma intermedia
La intensidad que circula por cada bobina siempre circula en el
mismo sentido
21
Motores Paso a Paso unipolares
Dos tipos de configuraciones
Paso completo: Se alimenta dos bobinas cada vez
Medio paso: En determinados instantes existe nicamente una
bobina alimentada
Paso completo
Facilidad de programacin
Mayor retencin del rotor
22
Configuracin de paso completo
23
Configuracin de medio paso
24
Motores paso a paso
ngulo de paso:
donde n
s
es el nmero (entero) de pasos del motor
ngulo total que gira el motor (A
m
):
donde n
p
= nmero de pulsos recibidos por el motor.
Velocidad angular: (rads/seg) donde f
p
= frecuencia (Hz)
Velocidad de rotacin: (rpm)
s
n
360
=
p m
n A =
s
p
n
f
2
=
s
p
n
f
N
60
=
(grados/paso)
25
Ejemplo
Un motor paso a paso tiene un ngulo de paso = 3,6 . (1) Cuntos
pulsos son necesarios para que el motor gire diez vueltas
completas? (2) Qu frecuencia de pulsos es necesaria para que el
motor gire a una velocidad de 100 rev/min?
Solucin:
(1) 3.6 = 360 / n
s
; n
s
= 360 / 3.6 = 100 pasos/vuelta
Diez revoluciones completas: 10(360) = 3600 = A
m
Por tanto n
p
= 3600 / 3.6 = 1000 pulsos
(2) Como N = 100 rev/min:
100 = 60 f
p
/ 100
f
p
= 10,000 / 60 = 166.667 = 167 Hz
s
n
360
=
p m
n A =
s
p
n
f
N
60
=
26
Servomotor
Encoder
Cubre-escobillas
Escobilla
Bobinado sin hierro
Cubierta (retorno magntico)
Conmutador
Imn
Eje
Brida motor
Cojinete de bolas
Pin motor
Montaje del engrajaje
Soporte del planetario
Planetarios
Engrajaje interno
Cojinete de bolas
Brida del reductor
Eje de salida
27
Actuadores
28
Arquitectura de un computador
Registros
de propsito
general
Unidad
aritmetico-
lgica (ALU)
Unidad de
Control
Memoria
principal
Interfaz de
entrada/salida
Perifricos
Control
Direcciones
Datos
Unidad Central de Proceso (CPU)
29
Perifricos Tpicos
Memoria CPU
Interrupciones
del reloj
de tiempo real
Interfaz de Entrada/Salida
Seales
digitales
In
Out
Operaciones
de pulsos
In
Out
Conversin
Analgico/Digital
Conversin
Digital/Analgico
Canales de
telemetra
P
l
a
n
t
a
Dispositivos
relacionados
con la planta
Unidades
de disco
USB
Impresora
Consola
Entrada
manual
Pantallas
Alarmas
Impresora
Dispositivos
de Operador
Dispositivos
relacionados con
el Computador
30
Entrada de seales digitales
Planta
Registro de
entrada digital
Seales digitales
de entrada
Decodificador
de direcciones
Enable
Select
CPU
Datos
Control
Direcciones
31
Salidas digitales
Planta
Registro
de salida
digital
Datos
Control
Direcciones
O
u
t
p
u
t
s
Decodificador
de direcciones
Enable
Select
32
Entradas/salidas de Pulsos
Planta
Address
decode
Data
Control
Address
Pulse
counter
Select
Pulse train
generator
Enable
Address
decode
Select
Enable
on/off
Reset
33
Plant
Multiplexer
Sample
and hold
Analog-to-digital
converter
I/O interface
CPU
Convert
Sample/hold
Channel
Select
Conversion
complete
Entradas Analgicas
34
Plant
I/O interface
Data
Select Select Select
CPU
Salidas Analgicas
D/A D/A D/A
35
Conversin
A/D y D/A
36
Conversion Analgico-Digital (A/D)
Muestreo - convierte la seal de tiempo continuo en una serie
de seales analgicas de tiempo discreto.
Cuantificacin - cada valor de la seal analgica de tiempo
discreto se convierte en un valor concreto entre un nmero
finito de niveles discretos (definidos previamente)
Codificacin - los niveles discretos de amplitud se convierten
en un cdigo digital
Variable
Time
Seal analgica
1001 1101 0101
Variables
discretas
37
HW en la conversion Analgico-Digital
Convertidor
Analgico/
Digital
Convertidor
Analgico/
Digital
Proceso
Sensor
y transductor
Sensor
y transductor
Otras seales
Variable
Continua
Acondicionador
de seal
Multiplexor
Computador
Digital
Computador
Digital
Amplificador
38
Caractersticas de un convertidor A/D
Frecuencia de muestreo - velocidad a la que se realiza el sondeo de
la seal analgica continua, por ejemplo 1000 muestras/seg
Cuantificacin - cada valor de la seal analgica de tiempo discreto
se transforma en un nivel discreto entre el conjunto de posibles
niveles
Resolucin - depende del nmero de niveles de cuantificacin
Tiempo de conversin - Cunto tiempo se necesita para convertir
la seal muestreada (de tiempo discreto) a cdigo digital?
Mtodo de conversin - medio por el cual se codifica la seal
analgica en la digital equivalente
Ejemplo - mtodo de aproximaciones sucesivas
39
Mtodo de aproximaciones sucesivas
Se comparan sucesivamente una serie de tensiones de ensayo con
la seal de entrada cuyo valor se desconoce
Nmero de las tensiones de ensayo = nmero de bits utilizados para
codificar la seal
La primera tensin de ensayo es de 1/2 de la escala completa de la
conversin A/D, y para las siguientes se considera consecutivamente
la mitad de la anterior.
Si el resto de la tensin de entrada supera la tensin de ensayo, se
introduce un valor de bit a 1, y si es inferior se introduce un 0
Los valores de los bits sucesivos, multiplicados por las tensiones de
ensayo respectivas, y sumadas, se convierten en el valor codificado
de la seal de entrada
40
Ejemplo
Seal analgica de 6.8 voltios. Codificar la seal en un registro de 6
bits con un rango de escala completo de 10 voltios.
Tensin
de entrada
Tensiones
de ensayo
Salida
digital
Para una precisin de 6
dgitos, el valor digital
binario resultante es
1001011, que es
interpretado como:
Tensin inicial
de entrada
Restos a la
tensin de ensayo
(cuando esta es inferior)
0
41
Resolucin
Niveles de cuantificacin definidos como:
donde N
q
= niveles de cuantificacin; y n es el nmero de bits.
Resolucin definida como:
donde R
ADC
es la resolucin del convetidor A/D; L es el rango de escala
completa del convertidor
La cuantificacin genera un error, porque la seal digital es slo la muestra de
la seal analgica original. El posible error mximo se produce cuando el
valor real de la seal analgica se encuentra en el lmite entre dos niveles
de cuantificacin adyacentes, en cuyo caso el error es la mitad del espacio
a nivel de cuantificacin, lo que nos da el siguiente error de cuantificacin:
n
q
N 2 =
1 2 1
=
=
n
q
ADC
L
N
L
R
ADC
R Quanerr
2
1
=
42
Ejemplo
Usando de un convertidor analgico-digital, una seal de tensin
continua se va a convertir en su equivalente digital. El rango de
tensin mxima es de 25 V. El convertidor posee una capacidad
de 16 bits y la escala completa es de 60 V. Determinar (1) nmero
de niveles de cuantificacin, (2) resolucin (3), distancia entre cada
nivel de cuantificacin y el error de cuantificacin para este
convertidor A/D.
(1) nmero de niveles de cuantificacin :
= 2
16
= 65536
(2) Resolucin:
R
ADC
= 60/(65536 -1) = 0.0009155 voltios
(3) Error de cuantificacin :
= (0.0009155)/2 = 0.00045778 voltios
n
q
N 2 =
1 2 1
=
=
n
q
ADC
L
N
L
R
ADC
R Quanerr
2
1
=
43
Conversin Digital-Analgico (D/A)
Convertir los valores digitales en una seal analgica continua
Decodificacin del valor digital a un valor analgico en instantes
discretos en el tiempo basado en el valor almacenado en un
registro
donde E
0
es la tensin de salida, E
ref
es el voltaje de referencia,
B
n
es el estado de los bits sucesivos en el registro binario
Mantenimiento de datos que convierten la serie de seales
analgicas discretas en una seal continua
( ) { }
n
n
ref
B B B E E
1
2 1 0
2 25 . 0 5 . 0
+ + + = L
u
k
t
u(t)
t
44
Un convertidor D/A tiene un voltaje de referencia de 100 V y 6 bits
de precisin. Tres instancias sucesivas de muestreo, separadas 0,5
segundos, muestran los siguientes datos en el registro de datos:
Valores de salida:
Muestra Dato Binario
1 101000
2 101010
3 101101
E
01
= 100{0.5(1)+0.25(0)+0.125(1)+0.0625(0)+0.03125(0)+0.015625(0)} = 62.50V
E
02
= 100{0.5(1)+0.25(0)+0.125(1)+0.0625(0)+0.03125(0)+0.015625(0)} = 65.63V
E
03
= 100{0.5(1)+0.25(0)+0.125(1)+0.0625(0)+0.03125(0)+0.015625(0)} = 70.31V
Ejemplo
45
Instrumentos analgicos
No repetible
No preciso
No repetible
Preciso
Repetible
No preciso
Repetible
Preciso
Repetibilidad y precisin
46
Sensores y actuadores
industriales
47
Medir distancias sin contacto mecnico
principio inductivo ptico ultrasonido
rango 0..10mm 15..1000 mm 20..2599mm
resolucin 0,1m 2m 300m
repetibilidad 1m 2m 500m
linealidad 0,4..5% 0,06..1,2% 0,5%
reactividad 0,35ms 0,9ms 30ms
comentarios para materiales para piezas muy lineal
que conducen pequeas y de largo alcance
electricidad, mviles resistente al
pequeo, barato polvo
laser
CCD
48
Medida de posicin binaria
Sensores binarios:
Micro-switch (contacto fin de carrera) +barato, -desgaste, rebota
Sensor ptico +fiable, -sensible a polvo o lquido
sensor magnetico (detector de proximidad) +insensible al polvo, -magnetico
49
Medida de posicin analgica
Potencimetro +barato, -desgaste, mala resolucin
Capacitivo +barato, -mala resolucin
Transformador balanceado (LVDT) +fiable, robusto, desplazamientos pequeos
Galgas extensiomtrcas +fiable, desplazamientos muy pequeos
piezo-elctrico + desplazamientos extremadamente pequeos
50
Transformador diferencial de variacin lineal (LVDT)
El LVDT es un dispositivo de reluctancia variable, donde una bobina primaria
centrada crea un flujo magntico que se acopla a travs de una armadura mvil
a una bobina secundaria enrrollada simtricamente a ambos lados de la primaria.
Dos componentes constituyen el LVDT: la armadura mvil y los arrollamientos
del transformador externo. Las bobinas secundarias se colocan opuestas en
serie, enrrolladas en serie, pero en direcciones opuestas.
Cuando la armadura mvil se centra entre los dos secundarios opuestos en serie, flujos
magnticos iguales en los dos secundarios, la tensin inducida en una mitad de la bobina
secundaria est desfasada 180 grados con la tensin inducida en la otra mitad del bobinado
secundario.
Cuando la armadura se mueve de esa posicin, aparece una tensin proporcional al
desplazamiento.
Armadura
Secundario
Secundario
Primario
Balanceado No balanceado
51
Medida de posicin o ngulo capacitivo
C =
A
d
fijo
mvil
La capacitancia es
evaluada modificando la
frecuencia de un
oscilador
52
Medida de posicin pequeas: galgas extensiomtricas
R =
l
A
l
2
V
A
=
volumen = constante, = constante
l"
Compensacin de temperatura
mediante galgas ficticias
Se usan frequentemente en edificios,
puentes, presas, ... para detectar
movimientos.
La resistencia de un alambre con resistividad se incrementa cuando se estira
l'
l
2
U
U
o
R
1
medida
R
2
compensacin
R
4
R
3
Medida en puente
(si U
0
= 0: R
1
R
4
= R
2
R
3
)
= resistividad
53
Efecto piezo-elctrico
Los materiales piezoelctricos (cristales), cambian de forma cuando se les aplica un
campo elctrico. Y a la inversa, los materiales piezoelctricos producen un campo
elctrico cuando se deforman.
Los transductores de cuarzo exhiben notables propiedades que
justifican su uso a gran escala en investigacin, desarrollo,
produccin y pruebas. Son muy estables, resistentes y compactos.
De la gran cantidad de materiales piezoelctricos disponibles en la
actualidad, el cuarzo se emplea preferentemente en el diseo de
transductores debido a las siguientes excelentes propiedades :
material de alto lmite de tensin, alrededor de 100 MPa (~
14 kilometros de profundidad de agua)
resistente a la temperatura (hasta 500C)
rigidez muy alta, alta linealidad e histresis insignificante
sensibilidad casi constante sobre un amplio rango de
temperaturas
la resistencia de aislamiento extremadamente alta (10+
14
ohms) que permite mediciones de baja frecuencia (<1 Hz)
Efecto
longitudinal
Efecto
transversal
Efecto
cizalla
54
Medida de esfuerzos
Fuerza / Par / Peso / Presin se miden mediante pequeos desplazamientos
(F = k x):
- Transductores piezo-elctricos
- Galgas extensiomtricas
Aceleracin se mide a travs de la medicin de la relacin fuerza/desplazamiento
(F = M )
55
Principio de encder angular ptico
Los codificadores pticos funcionan por medio de una rejilla que se mueve entre una
fuente de luz y un detector. El detector registra cuando la luz pasa a travs de las reas
transparentes de la rejilla.
Para aumentar la resolucin, la fuente de luz est colimada y se coloca una mscara
entre la rejilla y el detector. La rejilla y la mscara producen un efecto de obturacin, de
modo que slo cuando sus secciones transparentes estn alineadas permite el paso de la
luz hacia el detector.
Un codificador incremental genera un pulso para un incremento dado de rotacin del eje
(encoder rotativo), o un pulso de una determinada distancia lineal recorrida (encoder
lineal). La distancia total recorrida o la rotacin del eje angular se determina contando los
pulsos de salida del encoder.
Un encoder absoluto tiene una serie de canales de salida, de tal manera que cada
posicin del eje puede ser descrito por su propio cdigo. Cuanto mayor sea la resolucin
requerida ms canales de salida se necesitan.
56
Encoder angular incremental
40 di visiones 100 di visiones
57
courtesy Parker
Motion & Control
Posicin digital absoluta: cdigo de Gray
1 2 3 4 5 6 7 8 9 10 11 12 13 14 0 15
LSB
MSB
binario directo: falla si todos
los bits cambian ms o menos
al mismo tiempo
Gray: Slo un bit cambia en cada momento: no falla
Disco de Gray (8 bit)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 0 15
LSB
MSB
58
Encoder lineal
Tambin con banda magntica en vez de rejilla ptica
59
Medida analgica de velocidad: tacmetro
Un tacmetro sencillo es un imn permanente en rotacin que induce un voltaje
en una bobina del estator.
Esta tensin se convierte en un voltaje analgico o corriente, que ms tarde se
convertir en un valor digital.
Alternativamente, se puede medir la frecuencia de la seal para obtener
directamente el valor digital
Velocidad angular
Ui ~ d / dt,
f ~
analgico: 4..20 mA
digital: 010110110
N
S
transductor
60
Medicin de temperatura
Es el valor que se mide con ms frecuencia en la industria
Vaina
Extensiones
Montaje de
proteccin
61
Espectrmetro:
mide radiacin infrarroja mediante semiconductores fotosensibles
+ temperatura ms alta, medida en superficies, sin contacto
- precio ms alto
Termistancia (RTD detectores de temperatura resistivos):
metal cuya resistencia depende de la temperatura:
+ barato, robusto, alto rango de temperaturas ( -180C ..600C)
- requiere fuente de corriente, no lineal.
Termistor (NTC coeficiente de temperatura negativo):
semiconductor cuya resistencia depende de la temperatura:
+ muy barato, sensible,
- baja temperatura, impreciso, necesita fuente de corriente, fuertemente no lineal, fragil, autocalentamiento
Termopar:
par de metales diferentes que generan una tensin proporcional a la diferencia de temperatura
entre la unin caliente y fra (efecto Seebeck)
+ de alta precisin, alta temperatura, medicin puntual
- de baja tensin, exige una compensacin de unin fra, alta amplificacin, linealizacin
Bimetal:
indicador mecnico (si / no) de temperatura mediante la diferencia en los coeficientes de
dilatacin de dos metales
+muy barato, muy utilizado (tostadoras. ..)
Medicin de temperatura
62
Medidas hidrulicas
Caudal,
Nivel,
Presin,
Conductividad,
Sensor de pH,
Viscosidad,
Humedad,
Requisitos especiales: seguridad intrnseca = entorno explosivo, suelo marino =
alta presin
63
Medida de nivel
lser pulsado
pulsos de microondas
ultrasnico (40-60 kHz)
Ultrasnico de baja potencia
clula de carga
Columna
detector
F = mg
64
Medida de flujo
Distinguir:
Flujo volumtrico ( m
3
/s)
Flujo msico: (kg / s)
identicos cuando la densidad del lquido es constante
Mtodos principales:
- flotador
- turbina
- vortex
- gradiente de temperatura
- ultrasnico
- diferencia de presin
65
Medida de velocidad de flujo: presin diferencial
la velocidad del flujo es proporcional a la raz cuadrada de la diferencia
de presin
p
2
- p
1
= v
2
1
2
(efecto Bernoulli)
estrechamiento
membrana
Sensor
piezoelctrico
p
2
p
1
v
fluido de
viscosidad
abertura
66
Medida de flujo en una planta
67
Aproximadamente el 10% de los elementos de campo son los actuadores (que
influyen en el proceso).
Los actuadores pueden ser binarios (on/off) o analgicos (ej. un accionamiento de
velocidad variable)
Los ms comunes son:
Contactores elctricos (rels)
Elementos calefactores
Motores neumticos e hidrulicos (vlvulas, bombas)
Motores elctricos (de rotacin y lineal)
Solenoides,
Motor de corriente continua
Motores asncronos (de induccin)
Motores sncronos
Motores paso a paso, motores de reluctancia
Los actuadores son controlados por los mismos niveles de seal elctrica que
utilizan de sensores (4 .. 20 mA, 0 .. 10V, 0 .. 24V, etc), pero a niveles de potencia
ms alta.
Actuadores
68
Variadores de velocidad
Controlan la velocidad y aceleracin y protegen al motor (sobrecorriente, par,
temperatura).
Los variadores de alta potencia pueden devolver energa a la red en la frenada
(inversores)
Tienen su propio mercado (Automation & Drives)
Control de motor sencillo Armario para potencia > 10 kW Variador pequeo < 10 kW
(Rockwell)
Motores y variadores son negocios separados
69
Hidrulica y fluidos
Bombas, vlvulas,,
Vlvulas de fluidos
centralita
El actuador ms extendido en industria
(ligero, fiable, barato)
Transductores electro-neumticos
I/P corriente/presin
E/P voltaje/presin
Convierten seales elctricas de corriente
tensin en presin
Electrovlvulas
70
SCADA
71
SCADA (Supervisory Control and Data Acquisition)
Los sistemas SCADA estn destinados a la gestin de infraestructuras,
como por ejemplo procesos industriales.
Supervisin:
Conjunto de acciones desempeadas con el propsito de asegurar el
correcto funcionamiento del proceso incluso en situaciones anmalas.
Su objetivo es facilitar la tarea del operario encargado de la vigilancia
del proceso y su seguimiento.
Registrar la evolucin del proceso y detectar desviaciones indeseadas de
las variables
Analizar esas desviaciones y deducir el motivo. Elaborar un diagnstico de
la situacin
Resolver, en caso de que sea posible, situaciones conflictivas online
Tomar las medidas adecuadas para que no vuelva a suceder
72
SCADA (Supervisory Control and Data Acquisition)
Un SCADA es una aplicacin software de control de produccin que se
comunica con los dispositivos de campo y supervisa el proceso de forma
automtica desde la pantalla del ordenador.
Proporciona informacin del proceso a diversos usuarios: operadores,
supervisores de control de calidad, supervisin, mantenimiento, etc.
Los sistemas de interfaz entre usuario y planta basados en paneles de
control repletos de indicadores luminosos, instrumentos de medida y
pulsadores, estn siendo sustituidos por sistemas digitales que
implementan el panel sobre la pantalla de un ordenador.
73
SCADA (Supervisory Control and Data Acquisition)
Funciones principales:
Adquisicin de datos, para recoger procesar y almacenar la
informacin recibida.
Supervisin, para observar desde un monitor la evolucin de las
variables de control.
Control, para modificar la evolucin del proceso, actuando bien sobre
los reguladores autnomos bsicos (consignas, alarmas, mens, etc.)
bien directamente sobre el proceso mediante las salidas conectadas
74
SCADA (Supervisory Control and Data Acquisition)
75
SCADA (Supervisory Control and Data Acquisition)
76
SENSORES Y
ACTUADORES
You might also like
- Funcionalidad FamiliarDocument38 pagesFuncionalidad FamiliarLizandro Amador COAQUIRA COAQUIRANo ratings yet
- Actividad 2 Jerarquia de OperacionesDocument5 pagesActividad 2 Jerarquia de Operacionesmleal24No ratings yet
- Programa Introduccion Astronomia PDFDocument11 pagesPrograma Introduccion Astronomia PDFAxel Izaguirre MejiaNo ratings yet
- Coti 031 Vitrina Metalica QX Hosp SJLDocument8 pagesCoti 031 Vitrina Metalica QX Hosp SJLJohu Oscar Cuba PerezNo ratings yet
- Cartilla de Liderazgo para El CambioDocument16 pagesCartilla de Liderazgo para El CambioMARIA FERNANDANo ratings yet
- Howard P. Lovecraft - La Casa MalditaDocument16 pagesHoward P. Lovecraft - La Casa MalditaSABRICARDNo ratings yet
- FactorialDocument5 pagesFactorialJose CastroNo ratings yet
- Estudio de Mecánica de Suelos Cimentacion610sDocument73 pagesEstudio de Mecánica de Suelos Cimentacion610sZelaya WilsonNo ratings yet
- Evaluación en La Educación Sistema Educ Mexicano. Eleazar Correa GonzálezDocument10 pagesEvaluación en La Educación Sistema Educ Mexicano. Eleazar Correa GonzálezEleazar Correa González83% (6)
- Referencia 4 - Ocai Cap V - Uso Del Marco para Diagnosticar y Cambiar La Cultura Organizacional OcaiDocument25 pagesReferencia 4 - Ocai Cap V - Uso Del Marco para Diagnosticar y Cambiar La Cultura Organizacional OcaiCristina NinoskaNo ratings yet
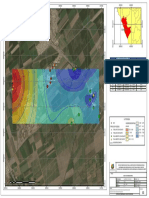
- Mapa de HidroisohipsaDocument1 pageMapa de HidroisohipsaRuth Alarcon MezaNo ratings yet
- Directiva #010-Gg - Essalud-99Document22 pagesDirectiva #010-Gg - Essalud-99Elisa Rutth Quispe PaucarNo ratings yet
- Admin de Procesos Tarea 7Document2 pagesAdmin de Procesos Tarea 7joseNo ratings yet
- Mapa Mental - Planteamiento Del Problema ACTIV 3Document1 pageMapa Mental - Planteamiento Del Problema ACTIV 3Jenny Zulay SUAREZ SOLANONo ratings yet
- II Modulo Psicologia Forense 1terminadoDocument159 pagesII Modulo Psicologia Forense 1terminadoLudwing33100% (1)
- Tema 12.mercado LaboralDocument17 pagesTema 12.mercado LaboralBEATRIZ HUAMANNo ratings yet
- SPSS Maps 10.0Document132 pagesSPSS Maps 10.0Ronald S. Garrido FuentesNo ratings yet
- Falsacionismo PresentacionDocument3 pagesFalsacionismo PresentacionKaty Alexandra Gutierrez LopezNo ratings yet
- Produccion Final Estadistica IDocument8 pagesProduccion Final Estadistica Idarniry salcedoNo ratings yet
- Semiologia EmbarazoDocument24 pagesSemiologia EmbarazoMonserrat CaicerosNo ratings yet
- La Chola Paceña - MUSEFDocument14 pagesLa Chola Paceña - MUSEFVida TedesquiNo ratings yet
- 2019-II MN216 Informe 4 Mecánica de Fluidos I FIM - UNIDocument61 pages2019-II MN216 Informe 4 Mecánica de Fluidos I FIM - UNIALEXANDER EMANUEL ISIDRO OLLERONo ratings yet
- Proyecto Papas Fritas Inguela y Flaco Final CorregidoDocument100 pagesProyecto Papas Fritas Inguela y Flaco Final CorregidoJorge Ivan Ramos Colmenares0% (1)
- Capacitacion Temario PNDDocument13 pagesCapacitacion Temario PNDJOMAGUESNo ratings yet
- Fisica I. Actividad 2.1Document4 pagesFisica I. Actividad 2.1Jhon Mauricio0% (1)
- Clasificación de Las Secciones EstructuralesDocument12 pagesClasificación de Las Secciones EstructuralesJonathan LázaroNo ratings yet
- MateriaasdasdasasdasdasDocument100 pagesMateriaasdasdasasdasdasErika Valentina Canales DiazNo ratings yet
- 3.X Sem8 FactorizaciónDocument3 pages3.X Sem8 FactorizaciónyamsNo ratings yet
- Modelos de Investigación y Teorías Sobre Aprendizaje de La Lectura Luis Bravo ValdiviesoDocument17 pagesModelos de Investigación y Teorías Sobre Aprendizaje de La Lectura Luis Bravo Valdiviesomaabe100% (10)
- Lectura Critica PDFDocument3 pagesLectura Critica PDFcristian almanzaNo ratings yet