You might also like
- Kalman Filter Design - MATLABDocument5 pagesKalman Filter Design - MATLABandromeda1047100% (2)
- hmw1 PDFDocument3 pageshmw1 PDFKevin CheungNo ratings yet
- Instrumentation & Measurement: Introduction To OscilloscopeDocument30 pagesInstrumentation & Measurement: Introduction To Oscilloscopezuliana_ismail8564No ratings yet
- Ethernetip-Sinamics G v3Document46 pagesEthernetip-Sinamics G v3Muhammad Haris Baig100% (1)
- Frick DBS&ST Rev eDocument52 pagesFrick DBS&ST Rev eJose TorrezNo ratings yet
- SIMATIC Comm DOKU v21 e PDFDocument304 pagesSIMATIC Comm DOKU v21 e PDFmiripaNo ratings yet
- Siemens D23-1-En PDFDocument174 pagesSiemens D23-1-En PDFbenimvNo ratings yet
- Rexroth-RD 500 RD52 Drive Control Device Field-Oriented Vector Control Application ManualDocument270 pagesRexroth-RD 500 RD52 Drive Control Device Field-Oriented Vector Control Application ManualNuma Key LumaNo ratings yet
- Lecture Notes 09Document19 pagesLecture Notes 09Abdul Hakeem Semar KamaluddinNo ratings yet
- SIMOCRANE Drive Based Technology Application Sinamics CU320 2 en V1 4 PDFDocument22 pagesSIMOCRANE Drive Based Technology Application Sinamics CU320 2 en V1 4 PDFRafaelNo ratings yet
- Understanding and Applying Kalman FilteringDocument37 pagesUnderstanding and Applying Kalman FilteringosamazimNo ratings yet
- Capacitive Coupling PDFDocument37 pagesCapacitive Coupling PDFDarel WilliamsNo ratings yet
- KalmanDocument34 pagesKalmanbilal309No ratings yet
- Sinamics DCM Emergency StopDocument13 pagesSinamics DCM Emergency StopAbez FiveNo ratings yet
- 13 Diagnosticos&Alarmas&FallasDocument29 pages13 Diagnosticos&Alarmas&FallasMiguelNo ratings yet
- A Proportional Control System Is A Type of Linear Feedback Control SystemDocument11 pagesA Proportional Control System Is A Type of Linear Feedback Control SystemAutomation WorldpkNo ratings yet
- Seminar & PPT ON Cad Cam & Applicaations IN Mechanical EngineeringDocument13 pagesSeminar & PPT ON Cad Cam & Applicaations IN Mechanical EngineeringSumit KumarNo ratings yet
- G120 PM250Document72 pagesG120 PM250stubborn002No ratings yet
- Proposal TA (MPPT)Document29 pagesProposal TA (MPPT)Sevty S. BhataraNo ratings yet
- Sinamics g120c En-UsDocument316 pagesSinamics g120c En-UsHoangBaoĐenNo ratings yet
- Kalman Filter Deriv PDFDocument29 pagesKalman Filter Deriv PDFgeorgez111100% (1)
- Manual SinamicsDocument346 pagesManual SinamicsNosoyYo Je Bg100% (1)
- Jurnal Internasional 4Document9 pagesJurnal Internasional 4Wisnu Sandika 1803110443100% (1)
- UNIT-III DC MachinesDocument29 pagesUNIT-III DC MachinesK PushyanthNo ratings yet
- Sinamics v20 DriveDocument22 pagesSinamics v20 DriveSyed AliNo ratings yet
- Forming The DC Link Capacitor G150Document816 pagesForming The DC Link Capacitor G150Bach HaianhNo ratings yet
- ColpittsDocument15 pagesColpittsCaine de Leon100% (1)
- v20 at s7-1200 Uss v1d2 en PDFDocument41 pagesv20 at s7-1200 Uss v1d2 en PDFKhaled OuniNo ratings yet
- CH11 ThyristorsDocument86 pagesCH11 Thyristorsmiathegirl9No ratings yet
- Profesor Vladimir Cubillos: ElectricidadDocument66 pagesProfesor Vladimir Cubillos: Electricidadluis vladimir cubillos sanchezNo ratings yet
- Ward Leonard Method of Speed ControlDocument6 pagesWard Leonard Method of Speed ControlSunil Kumar ThakurNo ratings yet
- 16.1.1 Declension of Mein (1st Person Singular) : Previous Chapter 16: Possessive Pronouns NextDocument43 pages16.1.1 Declension of Mein (1st Person Singular) : Previous Chapter 16: Possessive Pronouns NextrajeshNo ratings yet
- 6SL3210 5BE22 2UV0 Datasheet enDocument2 pages6SL3210 5BE22 2UV0 Datasheet enshahrear.sultanNo ratings yet
- Conversion Table: Inches Millimeters Inches MillimetersDocument1 pageConversion Table: Inches Millimeters Inches Millimetersseeralan balakrishnanNo ratings yet
- Lecture - PID ControllerDocument30 pagesLecture - PID ControllerCyril Felix100% (1)
- Chapter 7 - Driving Thytistors and TransistorsDocument11 pagesChapter 7 - Driving Thytistors and Transistorsmitros100% (2)
- Three-Axis Dynamic Modeling of Induction MotorDocument10 pagesThree-Axis Dynamic Modeling of Induction MotorRadu BabauNo ratings yet
- SINAMICS S150 Operating Instructions 0306 EngDocument474 pagesSINAMICS S150 Operating Instructions 0306 EngAlexandreNo ratings yet
- Kalman Filter: 1 Naming and Historical Develop-MentDocument20 pagesKalman Filter: 1 Naming and Historical Develop-Menth6j4vsNo ratings yet
- Controlling A Sinamics G120 Via Profisafe With A Simatic S7-1200 F-CpuDocument35 pagesControlling A Sinamics G120 Via Profisafe With A Simatic S7-1200 F-CpuEva SuárezNo ratings yet
- OctaveDocument122 pagesOctaveTarik ZiadNo ratings yet
- Arrancadores Suaves Media TensiónDocument118 pagesArrancadores Suaves Media Tensión15265562No ratings yet
- infoPLC Net 100746401 S7-1200 PID Compact DOKU v1d0 en PDFDocument50 pagesinfoPLC Net 100746401 S7-1200 PID Compact DOKU v1d0 en PDFMRRogueNo ratings yet
- Presentation - Transformer Failure Due To Breaker Switching TransientsDocument41 pagesPresentation - Transformer Failure Due To Breaker Switching Transientsbrockwell496No ratings yet
- Milling Machines & Operations: Presented By: Dcrust, MurthalDocument11 pagesMilling Machines & Operations: Presented By: Dcrust, MurthalfauzijmtiNo ratings yet
- Properties of Resistors Therm Is Tor CharacteristicsDocument12 pagesProperties of Resistors Therm Is Tor CharacteristicsRimsha AttikeNo ratings yet
- DC Motor: Prepared By: Mahesh KhatriDocument21 pagesDC Motor: Prepared By: Mahesh KhatriViresh ShaunakNo ratings yet
- Energy Engineering and Management: Power Factor Correction - The CalculationsDocument39 pagesEnergy Engineering and Management: Power Factor Correction - The CalculationsJohn Angelo ComiaNo ratings yet
- I-V Curve Tracing With A PCDocument7 pagesI-V Curve Tracing With A PCNilson Olympio100% (1)
- Design of ECG Homecare 12-Lead ECG Acquisition Using Single Channel ECG Device Developed On AD8232 Analog Front EndDocument6 pagesDesign of ECG Homecare 12-Lead ECG Acquisition Using Single Channel ECG Device Developed On AD8232 Analog Front Endfikri zainiNo ratings yet
- Circuitos Trifásicos DesequilibradosDocument10 pagesCircuitos Trifásicos DesequilibradosjohnNo ratings yet
- FX3G ManualDocument24 pagesFX3G ManualpfalencarNo ratings yet
- LMS 100 - 111 - 120 Laser Measurement SystemsDocument106 pagesLMS 100 - 111 - 120 Laser Measurement SystemsSyariefNo ratings yet
- VW Golf HandbookDocument98 pagesVW Golf HandbookΖαχος ΤσελιοςNo ratings yet
- Case Study - Kalman Filter Design and SimulationDocument10 pagesCase Study - Kalman Filter Design and Simulationrktiwary256034No ratings yet
- Lab 1: Model SelectionDocument6 pagesLab 1: Model SelectionthomasverbekeNo ratings yet
- Lab 6Document5 pagesLab 6daclecNo ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Computer Assignment 2 EE430Document1 pageComputer Assignment 2 EE430ah_shaliNo ratings yet
- Information Theory Chapter 4Document27 pagesInformation Theory Chapter 4ah_shaliNo ratings yet
- Part 2 Linear Block Codes: 1.14 Definition and Generator MatrixDocument12 pagesPart 2 Linear Block Codes: 1.14 Definition and Generator Matrixah_shaliNo ratings yet
- Adaptive Coding Og Modulation: Anders Gjendemsjø, NTNU 2004 (Gjendems@iet - Ntnu.no)Document28 pagesAdaptive Coding Og Modulation: Anders Gjendemsjø, NTNU 2004 (Gjendems@iet - Ntnu.no)ah_shaliNo ratings yet
- Capacity of Multiple-Input Multiple-Output (MIMO) Systems in Wireless CommunicationsDocument57 pagesCapacity of Multiple-Input Multiple-Output (MIMO) Systems in Wireless Communicationsah_shaliNo ratings yet
- Matlab Tutorial IntermediateDocument8 pagesMatlab Tutorial Intermediateah_shaliNo ratings yet
- How To Find Equilibrium Price and Quantity MathematicallyDocument2 pagesHow To Find Equilibrium Price and Quantity MathematicallyJoshua S Mjinja100% (1)
- Inv ItemDocument127 pagesInv Itemprabhu181No ratings yet
- Dh-Ipc-Hdw8341X-3D-S2: 3Mp Wizmind Dual-Lens Network CameraDocument3 pagesDh-Ipc-Hdw8341X-3D-S2: 3Mp Wizmind Dual-Lens Network CameraSteve CheaNo ratings yet
- Normal Motor and Sensory Nerve Conduction VelocityDocument3 pagesNormal Motor and Sensory Nerve Conduction Velocitycemm_11No ratings yet
- Automotive Solutions: Setting The Pace For InnovationDocument36 pagesAutomotive Solutions: Setting The Pace For InnovationAda TopanNo ratings yet
- Afghan SnowflakeDocument3 pagesAfghan SnowflakekiwibeasNo ratings yet
- Pump Station System Curves Session 1Document29 pagesPump Station System Curves Session 1Toan LeNo ratings yet
- ANSYS Tutorial Design OptimizationDocument9 pagesANSYS Tutorial Design OptimizationSimulation CAE100% (4)
- Mesh Based Multicast Routing ProtocolDocument10 pagesMesh Based Multicast Routing ProtocolArul JothiNo ratings yet
- Dead and Live LoadDocument5 pagesDead and Live LoadBhuwesh PantNo ratings yet
- Chapter Test 2nd Quarter.Document5 pagesChapter Test 2nd Quarter.Roziel MontalbanNo ratings yet
- Chapter 1 - Distillation PDFDocument107 pagesChapter 1 - Distillation PDFFatin Natasha NazriNo ratings yet
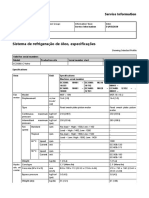
- Sistema de Refrigeração de Óleo, EspecificaçõesDocument2 pagesSistema de Refrigeração de Óleo, EspecificaçõesAlexandreNo ratings yet
- Change ManDocument17 pagesChange Mansrikanth9gannuNo ratings yet
- Jaap's Puzzle PageDocument1 pageJaap's Puzzle PagePhilippe DenielNo ratings yet
- Binomial Poisson Normal DistributionDocument9 pagesBinomial Poisson Normal DistributionFahim MahmudNo ratings yet
- Introduction To Computer Networks: NetworkDocument61 pagesIntroduction To Computer Networks: NetworkSaihari NarayanNo ratings yet
- Princom The Fundamentals of Electronics Module 2Document9 pagesPrincom The Fundamentals of Electronics Module 2melwin victoriaNo ratings yet
- Soda Ash PDFDocument45 pagesSoda Ash PDFM TNo ratings yet
- Cisco Ccna Icnd PPT 2.0 OspfDocument15 pagesCisco Ccna Icnd PPT 2.0 OspfAMIT RAJ KAUSHIKNo ratings yet
- BGP Tutorial SimplifiedDocument41 pagesBGP Tutorial SimplifiedAashish ChaudhariNo ratings yet
- 3.032 Problem Set 2 Solutions: Due: Start of Lecture, 09.21.07Document16 pages3.032 Problem Set 2 Solutions: Due: Start of Lecture, 09.21.07Pkay TandohNo ratings yet
- JP MS Ramaiah Edhitha 2015Document21 pagesJP MS Ramaiah Edhitha 2015UtkarshNo ratings yet
- Exercises Conditional SentencesDocument2 pagesExercises Conditional SentencesDivine GuancoNo ratings yet
- All The Questions of Section - A Are in Google Form and The Link To Attempt Them Is " Https://Forms - Gle/Jfvq8Wszicewchrj7 " 12 M Section - BDocument4 pagesAll The Questions of Section - A Are in Google Form and The Link To Attempt Them Is " Https://Forms - Gle/Jfvq8Wszicewchrj7 " 12 M Section - BKamal AnandNo ratings yet
- Tesp12205pi R1Document36 pagesTesp12205pi R1arabsniperNo ratings yet
- 1B MotionDocument20 pages1B MotionghalyaNo ratings yet
- Jee Advanced PaperDocument3 pagesJee Advanced PaperGaurav YadavNo ratings yet
- Module 5 Grade 10 FinalDocument9 pagesModule 5 Grade 10 FinalSandy CarbonillaNo ratings yet
- Calculation of Section Modulus PDFDocument4 pagesCalculation of Section Modulus PDFAnthony Gravagne40% (5)