You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Liotar Lectures D'enfance TranslationDocument42 pagesLiotar Lectures D'enfance TranslationvladaalisterNo ratings yet
- 101 Ways To React To A BookDocument2 pages101 Ways To React To A BookPatty HathawayNo ratings yet
- Silent Sound Technology AbstractDocument2 pagesSilent Sound Technology AbstractChinnu RSNo ratings yet
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Document5 pagesIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNo ratings yet
- ProteusDocument8 pagesProteusChinnu RS100% (1)
- Power Supply LayoutDocument1 pagePower Supply LayoutChinnu RSNo ratings yet
- ProteusDocument8 pagesProteusChinnu RS100% (1)
- Power Supply LayoutDocument1 pagePower Supply LayoutChinnu RSNo ratings yet
- Power Supply LayoutDocument1 pagePower Supply LayoutChinnu RSNo ratings yet
- Power Supply LayoutDocument1 pagePower Supply LayoutChinnu RSNo ratings yet
- Power Supply LayoutDocument1 pagePower Supply LayoutChinnu RSNo ratings yet
- Line Body Sensing: Pic Micro ControllerDocument1 pageLine Body Sensing: Pic Micro ControllerChinnu RSNo ratings yet
- Dees ST-Microelectronics Stradale Primosole, Viale Andrea Dona Universita' Di Catania 1-95 121 CATANIA Italy 1-95 125 CATANIA ItalyDocument4 pagesDees ST-Microelectronics Stradale Primosole, Viale Andrea Dona Universita' Di Catania 1-95 121 CATANIA Italy 1-95 125 CATANIA ItalyChinnu RSNo ratings yet
- Power Supply LayoutDocument1 pagePower Supply LayoutChinnu RSNo ratings yet
- Power Supply LayoutDocument1 pagePower Supply LayoutChinnu RSNo ratings yet
- Power Supply LayoutDocument1 pagePower Supply LayoutChinnu RSNo ratings yet
- Power Supply LayoutDocument1 pagePower Supply LayoutChinnu RSNo ratings yet
- Psycholinguistic Speech Processing AssessmentDocument352 pagesPsycholinguistic Speech Processing AssessmentStudia DiamonNo ratings yet
- Effects of Social Media PDFDocument39 pagesEffects of Social Media PDFNur AdlinaNo ratings yet
- Basic Customer Service SkillsDocument90 pagesBasic Customer Service SkillsGillian Delos ReyesNo ratings yet
- Operators and Lexical ConventionsDocument10 pagesOperators and Lexical ConventionsRamachandra ReddyNo ratings yet
- National Grade 6 Assessment 2018 English Language Paper 1Document20 pagesNational Grade 6 Assessment 2018 English Language Paper 1Grade6No ratings yet
- An Old Tibetan Document On The Uighurs: A New Translation and InterpretationDocument36 pagesAn Old Tibetan Document On The Uighurs: A New Translation and InterpretationAyhan PalaNo ratings yet
- Grammar Year 5 Lesson PlanDocument8 pagesGrammar Year 5 Lesson PlanmayaairaniNo ratings yet
- Hittites - WikipediaDocument15 pagesHittites - WikipediajjlajomNo ratings yet
- Reference: Locations of Microsoft Office Word 2003 Commands in MicrosoftDocument69 pagesReference: Locations of Microsoft Office Word 2003 Commands in MicrosoftjusticefornyefrankNo ratings yet
- ENW311 Journals and DiariesDocument28 pagesENW311 Journals and DiariesBella Amelia Resmanto100% (1)
- Error AnalysisDocument5 pagesError AnalysisNajah BwalyaNo ratings yet
- Are Is Alves Process Writing LTMDocument24 pagesAre Is Alves Process Writing LTMM Nata DiwangsaNo ratings yet
- CV Anit Siska MelindaDocument1 pageCV Anit Siska MelindaAnit SiskaMelindaNo ratings yet
- "Just Because" TemplateDocument2 pages"Just Because" TemplateDicky KurniawanNo ratings yet
- In Contrast, Accent Brummie and Cockney, Despite Both Being Spoken in The UK, Exhibit Noticeable Differences That Set Them Apart From Each OtherDocument2 pagesIn Contrast, Accent Brummie and Cockney, Despite Both Being Spoken in The UK, Exhibit Noticeable Differences That Set Them Apart From Each OtherSofia DosanovaNo ratings yet
- Editorship, Dr. S.A. OstroumovDocument4 pagesEditorship, Dr. S.A. OstroumovSergei OstroumovNo ratings yet
- Nagy & Townsend 2012Document18 pagesNagy & Townsend 2012Elleiah Samantha ManalastasNo ratings yet
- iOS Game Development by Example - Sample ChapterDocument18 pagesiOS Game Development by Example - Sample ChapterPackt Publishing0% (1)
- MYP LANGUAGE A RUBRIC - Modeling Steinbeck PDFDocument1 pageMYP LANGUAGE A RUBRIC - Modeling Steinbeck PDFKia1997100% (1)
- Relative Clauses EjerciciosDocument9 pagesRelative Clauses EjerciciosQueralt Pedrol MestreNo ratings yet
- Ability and SkillsDocument3 pagesAbility and Skillsa.rodriguezmarcoNo ratings yet
- Grade 2 Language Arts Worksheets PDFDocument3 pagesGrade 2 Language Arts Worksheets PDFLeonNo ratings yet
- Daniel J 252 Tte The Age of SecrecyDocument444 pagesDaniel J 252 Tte The Age of SecrecyPrivremenko Jedan100% (2)
- Assertiveness Manual PDFDocument18 pagesAssertiveness Manual PDFkarwa_a4uNo ratings yet
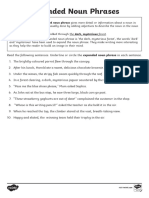
- Expanded Noun Phrases - AnswersDocument3 pagesExpanded Noun Phrases - AnswersManal SalamiNo ratings yet
- Grade 3-Eng-Chapter1-WorksheetDocument6 pagesGrade 3-Eng-Chapter1-WorksheetAsif FarhanaNo ratings yet
- Barthes Rhetoric of The Image ExDocument13 pagesBarthes Rhetoric of The Image ExMohammad Asraful Omar FahimNo ratings yet
- Practicing Adverb Clauses AnswersDocument9 pagesPracticing Adverb Clauses Answersasvas100% (1)