You might also like
- Hi Volts Diff AmplifierDocument6 pagesHi Volts Diff AmplifierattapapaNo ratings yet
- AN166 Basic feedback theoryDocument5 pagesAN166 Basic feedback theorySourik BharNo ratings yet
- BFW 10Document3 pagesBFW 10Manohar PNo ratings yet
- FET Principles and CircuitsDocument4 pagesFET Principles and CircuitsJohan TaalanderwijsNo ratings yet
- Audio-Optical Isolation AmpDocument12 pagesAudio-Optical Isolation AmpattapapaNo ratings yet
- Know Your Potatoes: From Our SelectionDocument2 pagesKnow Your Potatoes: From Our SelectionattapapaNo ratings yet
- Analog Devices Analog To Digital Conversion Handbook Jun1972Document402 pagesAnalog Devices Analog To Digital Conversion Handbook Jun1972attapapaNo ratings yet
- A Snail Tail SubwooferDocument7 pagesA Snail Tail SubwooferattapapaNo ratings yet
- Build A Brain Wave Feedback Monitor PDFDocument6 pagesBuild A Brain Wave Feedback Monitor PDFpomodoroNo ratings yet
- Practical Test & Measurement - Stop Worrying About Coupling CapacitorsDocument14 pagesPractical Test & Measurement - Stop Worrying About Coupling CapacitorsattapapaNo ratings yet
- Brain Waves and Biofeedback TrainingDocument6 pagesBrain Waves and Biofeedback TrainingattapapaNo ratings yet
- Dulce de Membrillo VCPDocument1 pageDulce de Membrillo VCPattapapaNo ratings yet
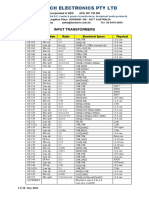
- Harbuch Electronics Pty LTD: Input TransformersDocument4 pagesHarbuch Electronics Pty LTD: Input Transformersattapapa100% (1)
- Berm Rex C100Document1 pageBerm Rex C100attapapaNo ratings yet
- On Robert Bontine Cunningham GrahamDocument9 pagesOn Robert Bontine Cunningham GrahamattapapaNo ratings yet
- LSK389 Dual Monolithic JFETDocument14 pagesLSK389 Dual Monolithic JFETattapapaNo ratings yet
- Santiagos Dagger-01Document1 pageSantiagos Dagger-01attapapaNo ratings yet
- Science Respectability ChecklistDocument4 pagesScience Respectability ChecklistattapapaNo ratings yet
- Transistors by CCDocument7 pagesTransistors by CCattapapaNo ratings yet
- DC Motor Driver ICDocument11 pagesDC Motor Driver ICKoray KaraNo ratings yet
- Linear Systems Reintroduces LSK389Document2 pagesLinear Systems Reintroduces LSK389attapapaNo ratings yet
- How To Use The CNC V4 Board (Despite Its "Quirks") : InstructablesDocument5 pagesHow To Use The CNC V4 Board (Despite Its "Quirks") : InstructablesattapapaNo ratings yet
- Braun Multipractic 4262 2 GBDocument11 pagesBraun Multipractic 4262 2 GBattapapaNo ratings yet
- Db's For DummiesDocument4 pagesDb's For DummiesattapapaNo ratings yet
- Direct Injection With Line XformerDocument1 pageDirect Injection With Line XformerattapapaNo ratings yet
- ARDUINO UNO TB6560 Stepper Motor DriverDocument4 pagesARDUINO UNO TB6560 Stepper Motor DriverattapapaNo ratings yet
- Russel Hobbs 4461Document21 pagesRussel Hobbs 4461attapapa100% (1)
- Automatic Control (PID Etc)Document4 pagesAutomatic Control (PID Etc)attapapaNo ratings yet
- Breadmaker Russell HobbsDocument16 pagesBreadmaker Russell HobbsattapapaNo ratings yet
- Nazi Rally in Buenos Aires, 1938Document6 pagesNazi Rally in Buenos Aires, 1938attapapaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Manual Sidoor At12 En-UsDocument48 pagesManual Sidoor At12 En-UsPabloScurraNo ratings yet
- Doosan Puo86t PDFDocument179 pagesDoosan Puo86t PDFMarcosOrtiz100% (1)
- DS-212200-FM200 CLEAN AGENT EXTINGUISHING SYSTEM - RiskDocument1 pageDS-212200-FM200 CLEAN AGENT EXTINGUISHING SYSTEM - RiskLi LiuNo ratings yet
- Charging & BMSDocument36 pagesCharging & BMSAbhishek ChavanNo ratings yet
- Aging and Weathering TestingDocument10 pagesAging and Weathering TestingChin-Min YangNo ratings yet
- TASD Air-Cooled Screw Chiller Product ManualDocument12 pagesTASD Air-Cooled Screw Chiller Product ManualLuis BermudezNo ratings yet
- Question Bank TLWGDocument8 pagesQuestion Bank TLWGGaurav ShankarNo ratings yet
- Incredibles IIDocument23 pagesIncredibles IILYNDON MENDIOLANo ratings yet
- Service Letter SL2020-701/KNB: Third-Party Spindle Guides and NozzlesDocument2 pagesService Letter SL2020-701/KNB: Third-Party Spindle Guides and NozzlesStathis MoumousisNo ratings yet
- Learnenglish Podcasts Professionals Emotional IntelligenceDocument20 pagesLearnenglish Podcasts Professionals Emotional IntelligenceChandrasekhar ReddyNo ratings yet
- Chemical Bandwidth ReportDocument40 pagesChemical Bandwidth ReportterumistarNo ratings yet
- Winnebago CatalogDocument241 pagesWinnebago Catalogchaput87No ratings yet
- As 1767.2.1-1999 Insulating Liquids Test Methods - Determination of The Breakdown Voltage at Power FrequencyDocument8 pagesAs 1767.2.1-1999 Insulating Liquids Test Methods - Determination of The Breakdown Voltage at Power FrequencySAI Global - APACNo ratings yet
- Pneumatics Technical CataloqueLDocument168 pagesPneumatics Technical CataloqueLClaudio AllubNo ratings yet
- 2500 OR 2503 SERIES CONTROLLER/TRANSMITTER INSTRUCTION MANUALDocument32 pages2500 OR 2503 SERIES CONTROLLER/TRANSMITTER INSTRUCTION MANUALJesus GBNo ratings yet
- Chapter 29 RadioactivityDocument21 pagesChapter 29 RadioactivityAlicia WilliamsNo ratings yet
- Análisis de Circuitos Lineales 2da Edicion Raymond A. DeCarlo, Pen-Min Lin PDFDocument946 pagesAnálisis de Circuitos Lineales 2da Edicion Raymond A. DeCarlo, Pen-Min Lin PDFroy9302No ratings yet
- Enclosure Cooling Unit Model User's GuideDocument24 pagesEnclosure Cooling Unit Model User's GuideAgus CahyonoNo ratings yet
- Economics of Producing Fuel Pellets From BiomassDocument7 pagesEconomics of Producing Fuel Pellets From Biomassuser121821No ratings yet
- Alpaccess: Wind Turbine Maintenance & RepairsDocument7 pagesAlpaccess: Wind Turbine Maintenance & RepairsDragos StateNo ratings yet
- NP EX19 11a JinruiDong 2Document11 pagesNP EX19 11a JinruiDong 2Ike DongNo ratings yet
- Re10460 PDFDocument20 pagesRe10460 PDFINVESTIGACION Y DESARROLLONo ratings yet
- Exercise 1Document47 pagesExercise 1asthaNo ratings yet
- Pelton Turbine CharacteristicsDocument10 pagesPelton Turbine CharacteristicsViknesh MjNo ratings yet
- 6CH05 01 Que 20150615 PDFDocument28 pages6CH05 01 Que 20150615 PDFAhmad MohdNo ratings yet
- DB'S Calculation: Energy Conservation-Special Notes GeneralDocument1 pageDB'S Calculation: Energy Conservation-Special Notes GeneralAbid AyubNo ratings yet
- Miniature Power Relay Features 12A Switching, Low Coil PowerDocument3 pagesMiniature Power Relay Features 12A Switching, Low Coil Powerkhadiro mahboulNo ratings yet
- Motor Protection Switches: MS25, MST25, MS20, MST20Document6 pagesMotor Protection Switches: MS25, MST25, MS20, MST20Anonymous dqbb02DUhNo ratings yet
- Critical Tasks SonDocument4 pagesCritical Tasks SonhamdNo ratings yet